
Finite-Time Synchronization Analysis for BAM Neural Networks with Time-Varying Delays by Applying the Maximum-Value Approach with New Inequalities

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries
3. Main Results
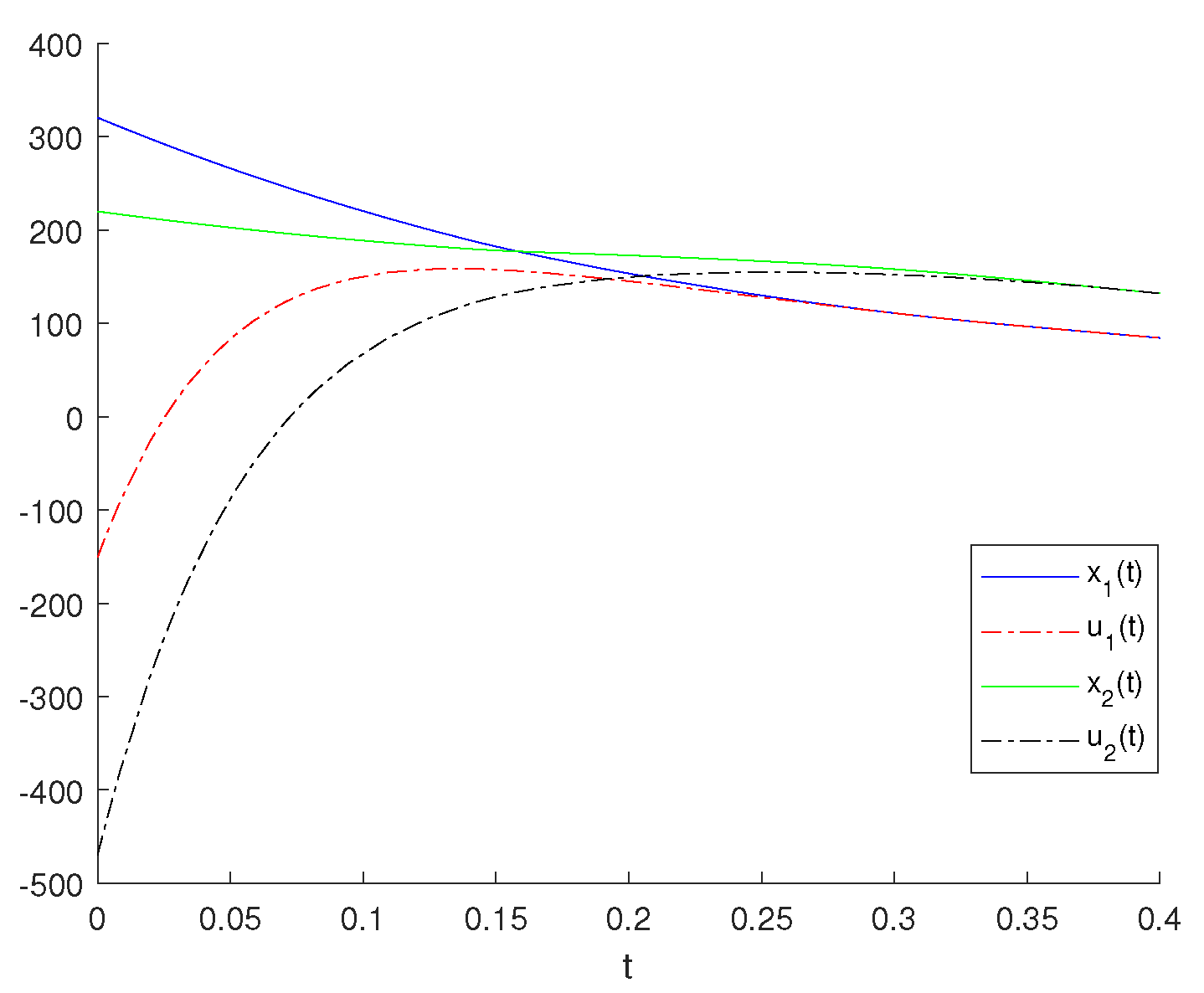
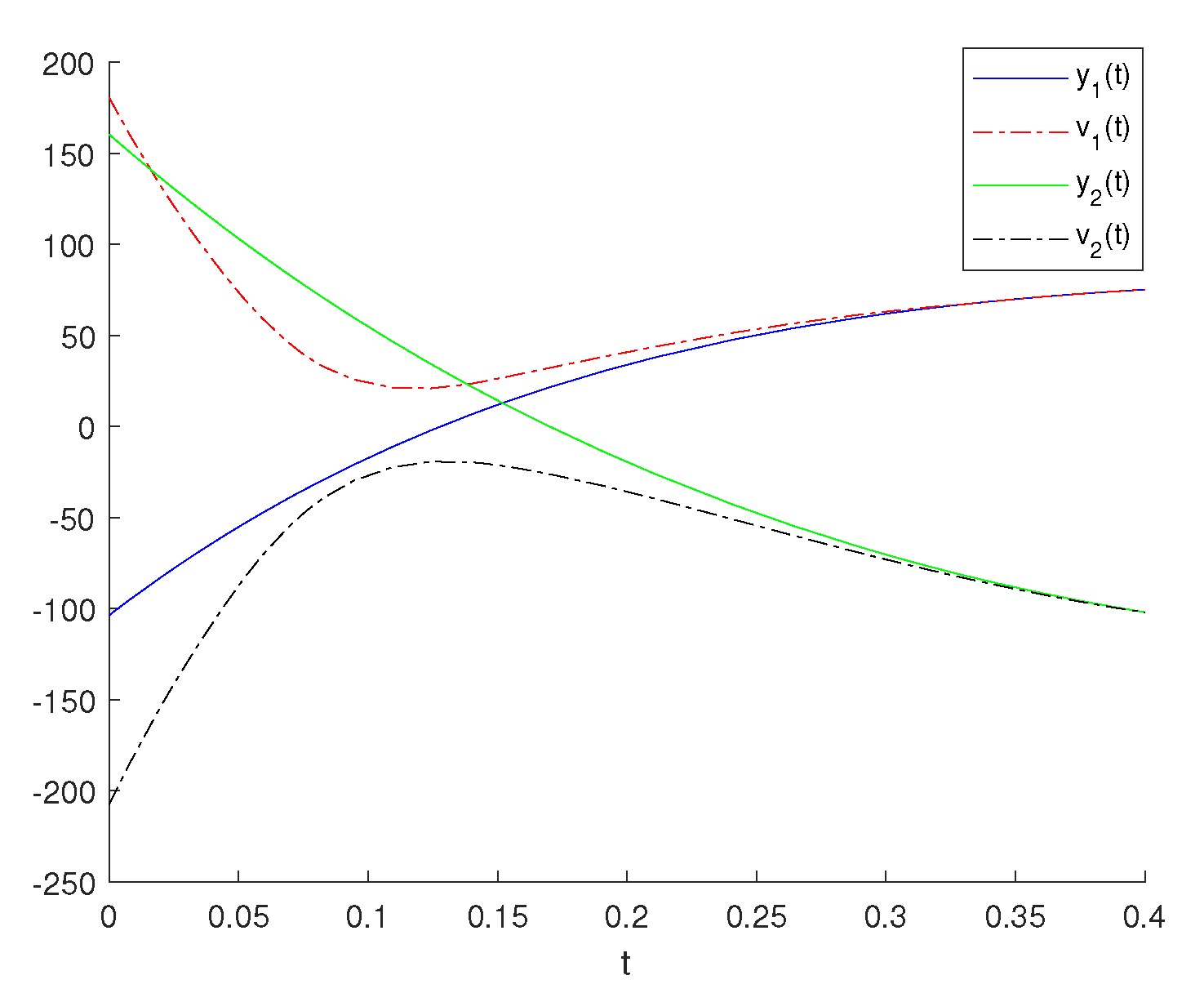
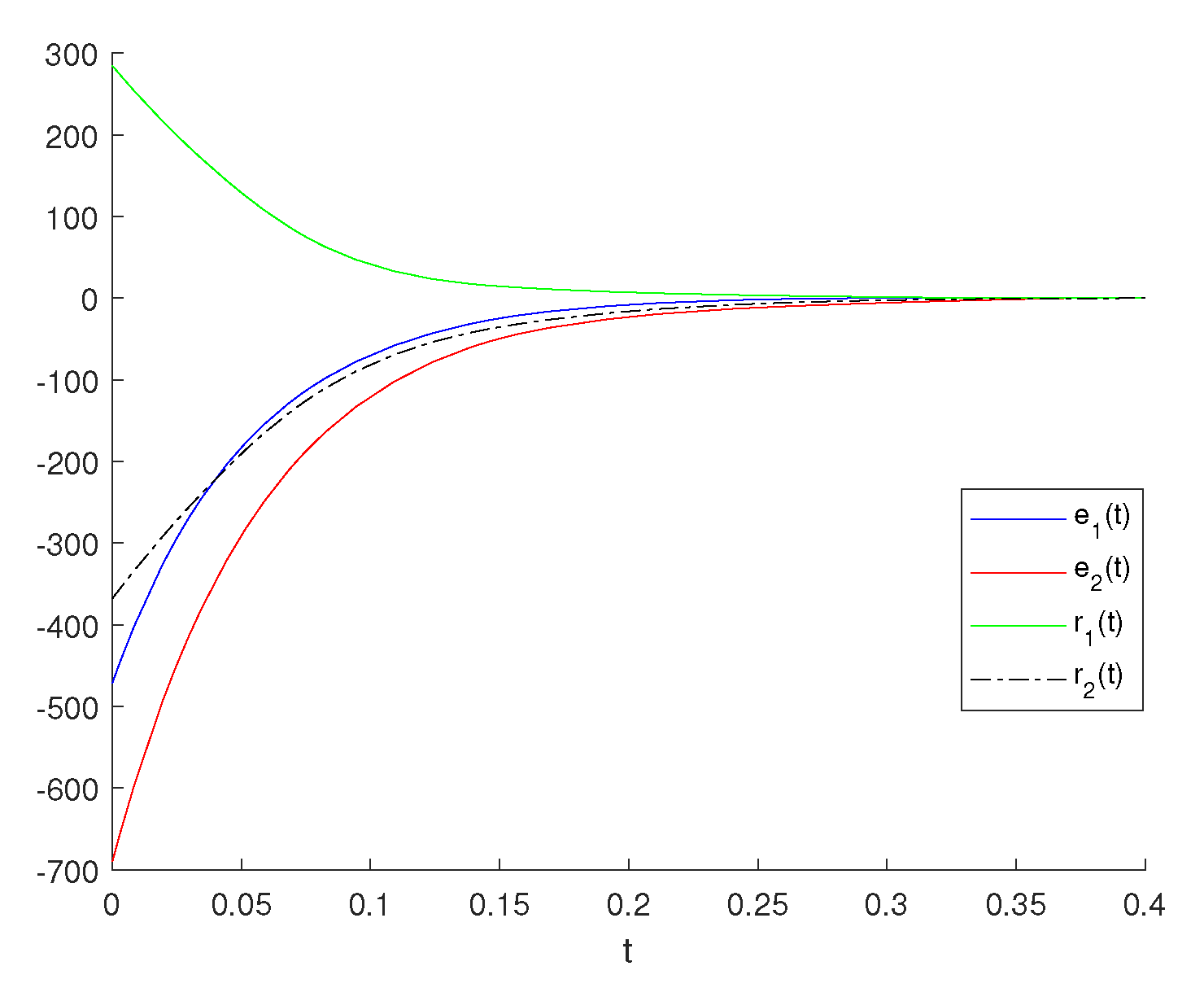
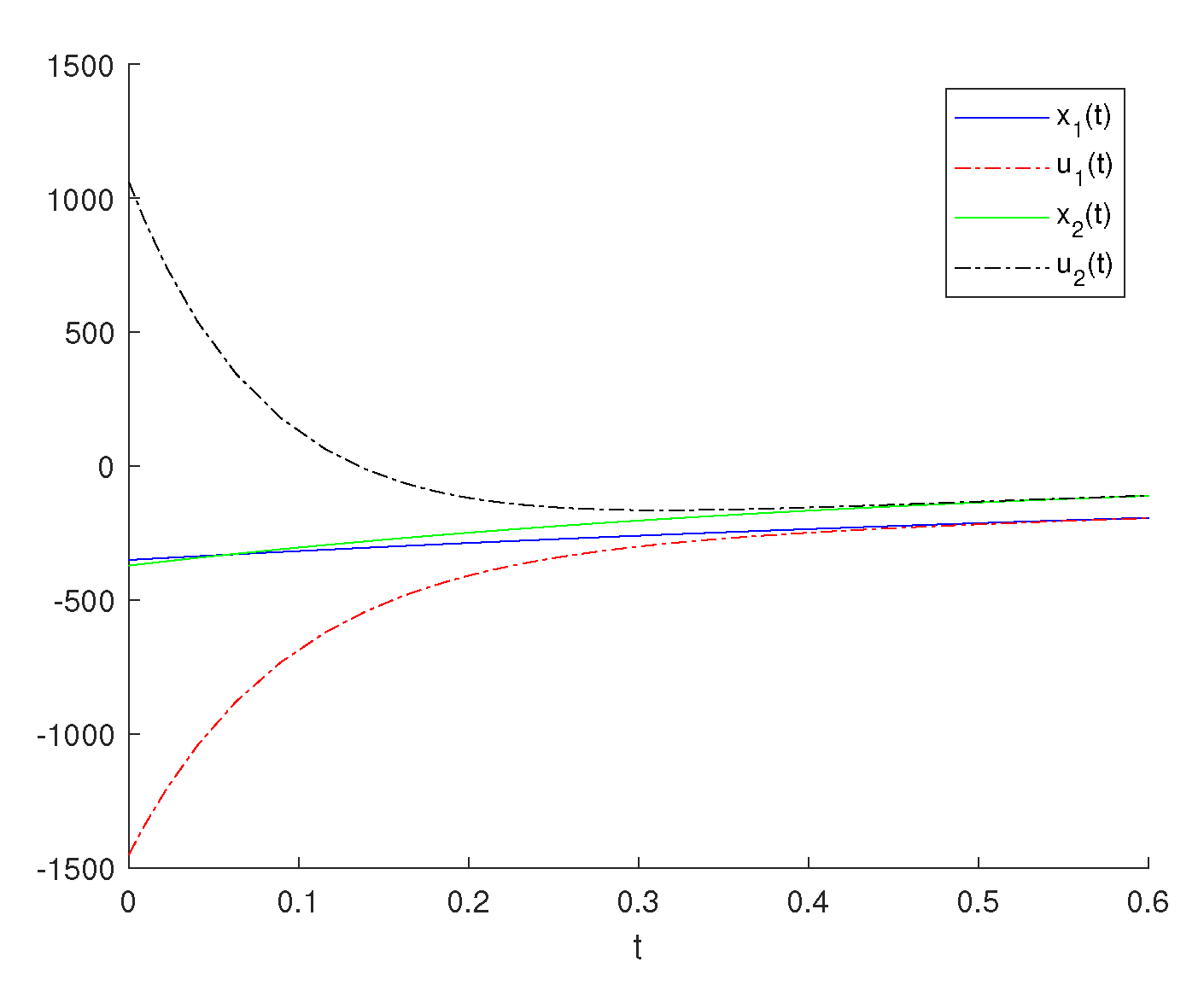
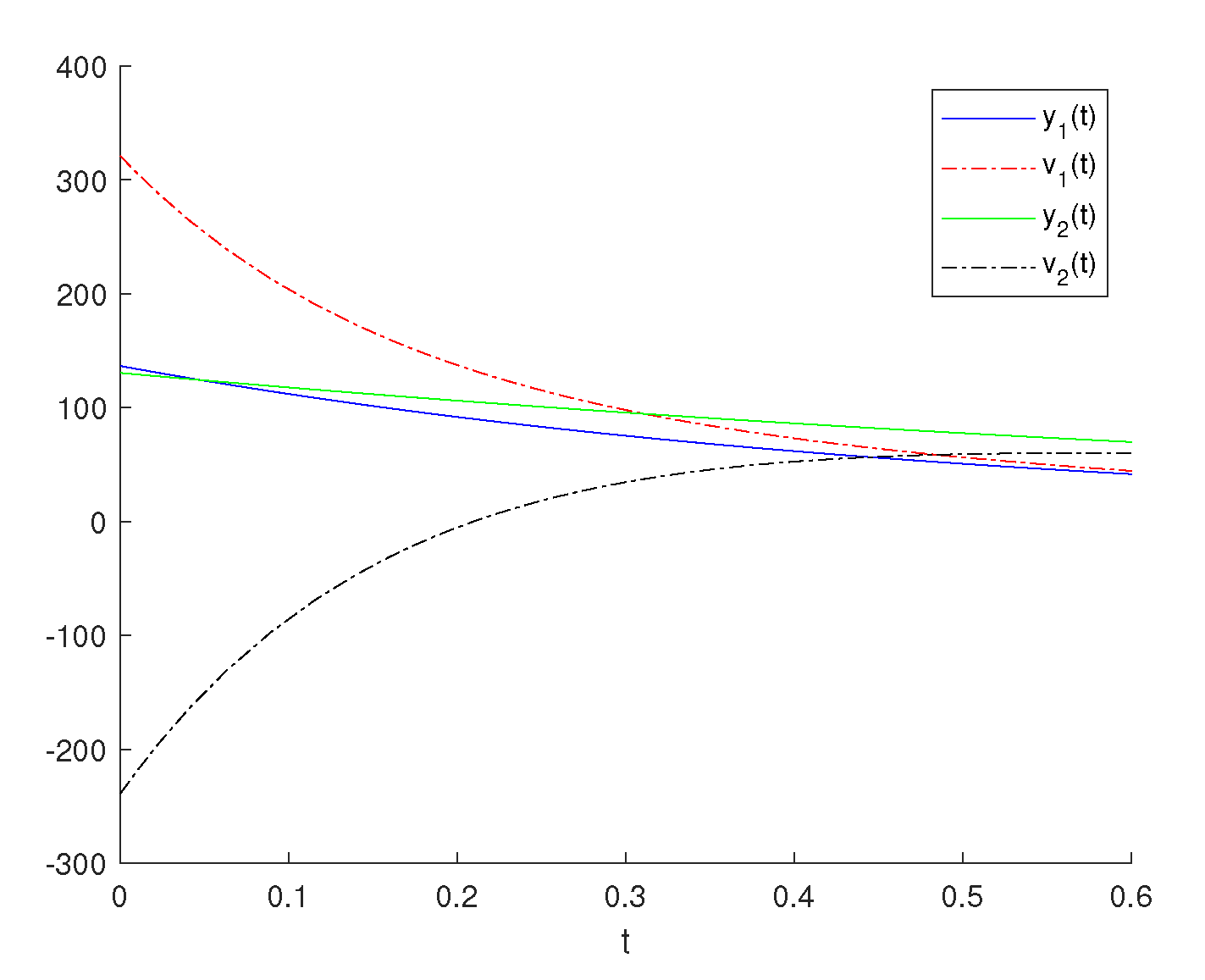
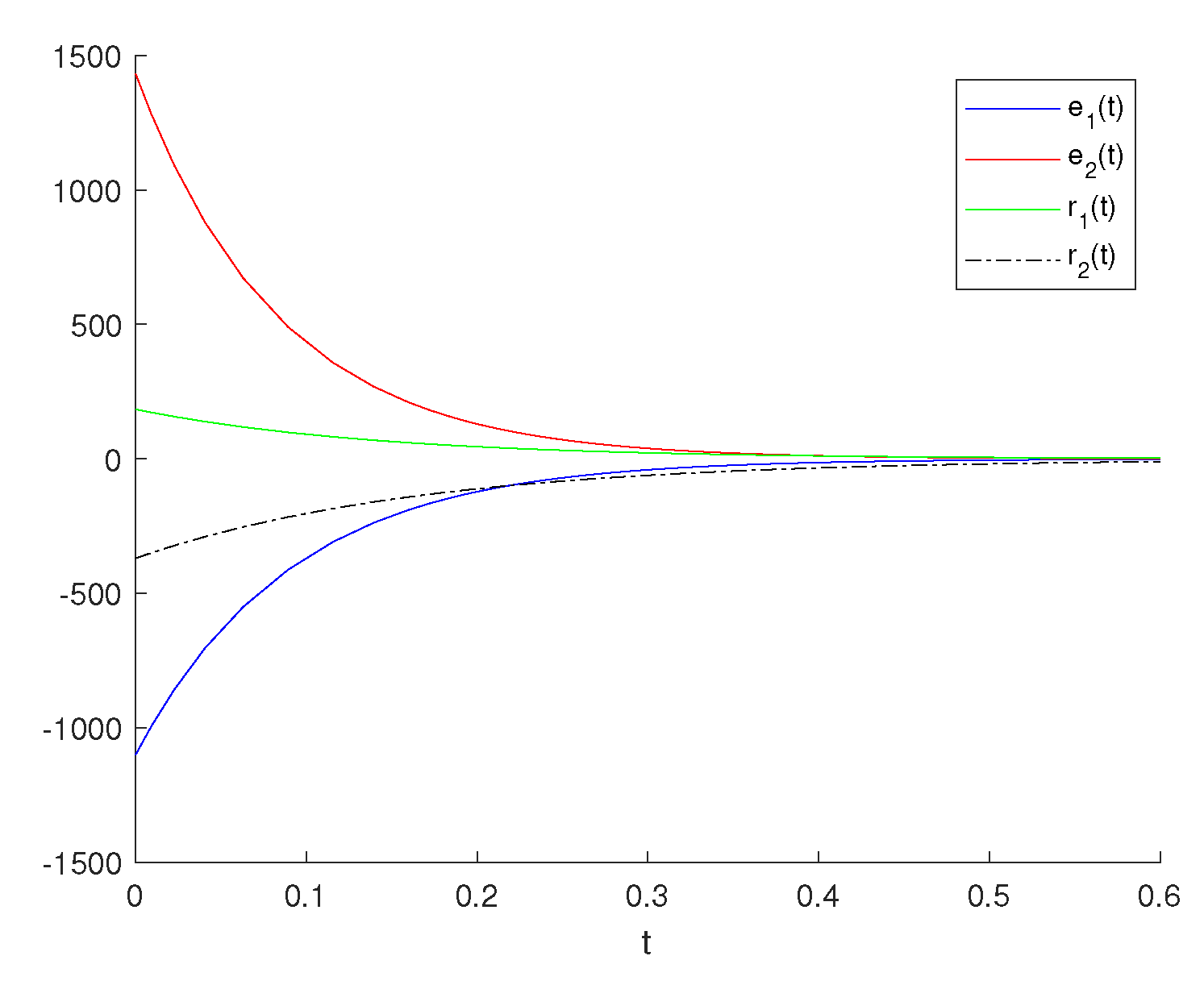
4. Numerical Examples
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kosko, B. Adaptive bidirectional associative memories. Appl. Opt. 1987, 26, 4947–4960. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kosko, B. Bidirectional associative memories. IEEE Trans. Syst. Man Cybern. 1988, 18, 49–60. [Google Scholar] [CrossRef] [Green Version]
- Shafiya, M.; Nagamani, G.; Dafik, D. Global synchronization of uncertain fractional-order BAM neural networks with time delay via improved fractional-order integral inequality. Math. Comput. Simul. 2021, 191, 168–186. [Google Scholar] [CrossRef]
- Zhao, Y.; Ren, S.; Kurths, J. Synchronization of coupled memristive competitive BAM neural networks with different time scales. Neurocomputing 2021, 427, 110–117. [Google Scholar] [CrossRef]
- Xiao, J.; Zhong, S.; Wen, S. Improved approach to the problem of the global Mittag–Leffler synchronization for fractional-order multidimension-valued BAM neural networks based on new inequalities. Neural Netw. 2021, 133, 87–100. [Google Scholar] [CrossRef]
- Lin, F.; Zhang, Z. Global asymptotic synchronization of a class of BAM neural networks with time delays via integrating inequality techniques. J. Syst. Sci. Complex. 2020, 33, 366–382. [Google Scholar] [CrossRef]
- Xiao, J.; Wen, S.; Yang, X.; Zhong, S. New approach to global Mittag–Leffler synchronization problem of fractional-order quaternion-valued BAM neural networks based on a new inequality. Neural Netw. 2020, 122, 320–337. [Google Scholar] [CrossRef]
- Zhang, J.; Wu, J.; Bao, H.; Cao, J. Synchronization analysis of fractional-order three-neuron BAM neural networks with multiple time delays. Appl. Math. Comput. 2018, 339, 441–450. [Google Scholar] [CrossRef]
- Wang, D.; Huang, L.; Tang, L. Dissipativity and synchronization of generalized BAM neural networks with multivariate discontinuous activations. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 3815–3827. [Google Scholar]
- Ye, R.; Liu, X.; Zhang, H.; Cao, J. Global Mittag–Leffler synchronization for fractional-order BAM neural networks with impulses and multiple variable delays via delayed-feedback control strategy. Neural Process. Lett. 2019, 49, 1–18. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, A.; Yang, L. Global asymptotic periodic synchronization for delayed complex-valued BAM neural networks via vector-valued inequality techniques. Neural Process. Lett. 2018, 48, 1019–1041. [Google Scholar] [CrossRef]
- Yang, W.; Yu, W.; Cao, J.; Alsaadi, F.E.; Hayat, T. Global exponential stability and lag synchronization for delayed memristive fuzzy Cohen-Grossberg BAM neural networks with impulses. Neural Netw. 2018, 98, 122–153. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Yu, M.; Luo, X.; Liu, L.; Yuan, M.; Zhao, W. Synchronization of memristive BAM neural networks with leakage delay and additive time-varying delay components via sampled-data control. Chaos Solitons Fractals 2017, 104, 84–97. [Google Scholar] [CrossRef]
- Zhou, Z.; Zhang, Z.; Chen, M. Finite-time synchronization for fuzzy delayed neutral-type inertial Bam neural networks via the figure analysis approach. Int. J. Fuzzy Syst. 2022, 24, 229–246. [Google Scholar] [CrossRef]
- Li, L.; Xu, R.; Gan, Q.; Lin, J. A switching control for finite-time synchronization of memristor-based BAM neural networks with stochastic disturbances. Nonlinear Anal. Model. Control 2020, 25, 958–979. [Google Scholar] [CrossRef]
- Du, F.; Lu, J. New criterion for finite-time synchronization of fractional order memristor-based neural networks with time delay. Appl. Math. Comput. 2021, 389, 125616. [Google Scholar] [CrossRef]
- Zhang, L.; Yang, Y. Finite time impulsive synchronization of fractional order memristive BAM neural networks. Neurocomputing 2020, 384, 213–224. [Google Scholar] [CrossRef]
- Tang, R.; Yang, X.; Wan, X.; Zou, Y.; Cheng, Z.; Fardoun, H.M. Finite-time synchronization of nonidentical BAM discontinuous fuzzy neural networks with delays and impulsive effects via non-chattering quantized control. Commun. Nonlinear Sci. Numer. Simul. 2019, 78, 104893. [Google Scholar] [CrossRef]
- Wang, W.; Wang, X.; Luo, X.; Yuan, M. Finite-time projective synchronization of memristor-based BAM neural networks and applications in image encryption. IEEE Access 2018, 6, 56457–56476. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, L.; Peng, H.; Xiao, J.; Yang, Y.; Zheng, M.; Zhao, H. Finite-time synchronization for memristor-based BAM neural networks with stochastic perturbations and time-varying delays. Int. J. Robust Nonlinear Control 2018, 28, 5118–5139. [Google Scholar] [CrossRef]
- Guo, R.; Zhang, Z.; Chen, J.; Lin, C.; Liu, Y. Finite-time synchronization for delayed complex-valued BAM neural networks. In Proceedings of the 2017 Chinese Automation Congress (CAC), Jinan, China, 20–22 October 2017; pp. 872–877. [Google Scholar]
- Xiao, J.; Zhong, S.; Li, Y.; Xu, F. Finite-time Mittag–Leffler synchronization of fractional-order memristive BAM neural networks with time delays. Neurocomputing 2017, 219, 431–439. [Google Scholar] [CrossRef]
- Chen, S.; Li, H.; Kao, Y.; Zhang, L.; Hu, C. Finite-time stabilization of fractional-order fuzzy quaternion-valued BAM neural networks via direct quaternion approach. J. Frankl. Inst. 2021, 358, 7650–7673. [Google Scholar] [CrossRef]
- Cao, Y.; Ramajayam, S.; Sriraman, R.; Samidurai, R. Leakage delay on stabilization of finite-time complex-valued BAM neural network: Decomposition approach. Neurocomputing 2021, 463, 505–513. [Google Scholar] [CrossRef]
- Yan, H.; Qiao, Y.; Duan, L.; Zhang, L. Global Mittag–Leffler stabilization of fractional-order BAM neural networks with linear state feedback controllers. Math. Probl. Eng. 2020, 2020, 6398208. [Google Scholar] [CrossRef]
- Arslan, E.; Narayanan, G.; Ali, M.S.; Arik, S.; Saroha, S. Controller design for finite-time and fixed-time stabilization of fractional-order memristive complex-valued BAM neural networks with uncertain parameters and time-varying delays. Neural Netw. 2020, 130, 60–74. [Google Scholar] [CrossRef]
- Cong, E.; Han, X.; Zhang, X. New stabilization method for delayed discrete-time Cohen-Grossberg BAM neural networks. IEEE Access 2020, 8, 99327–99336. [Google Scholar] [CrossRef]
- Pratap, A.; Raja, R.; Cao, J.; Rihan, F.A.; Seadawy, A.R. Quasi-pinning synchronization and stabilization of fractional order BAM neural networks with delays and discontinuous neuron activations. Chaos Solitons Fractals 2020, 131, 109491. [Google Scholar] [CrossRef]
- Yang, Z.; Li, J.; Niu, Y. Finite-time stabilization of fractional-order delayed bidirectional associative memory neural networks. Sci. Asia 2019, 45, 589–596. [Google Scholar] [CrossRef] [Green Version]
- Yang, Z.; Zhang, J. Global stabilization of fractional-order bidirectional associative memory neural networks with mixed time delays via adaptive feedback control. Int. J. Comput. Math. 2020, 97, 2074–2090. [Google Scholar] [CrossRef]
- Cheng, W.; Wu, A.; Zhang, J.; Li, B. Adaptive control of Mittag–Leffler stabilization and synchronization for delayed fractional-order BAM neural networks. Adv. Differ. Equ. 2019, 2019, 337. [Google Scholar] [CrossRef] [Green Version]
- Lu, B.; Jiang, H.; Hu, C.; Abdurahman, A. Pinning impulsive stabilization for BAM reaction-diffusion neural networks with mixed delays. J. Frankl. Inst. 2018, 355, 8802–8829. [Google Scholar] [CrossRef]
- Chinnathambi, R.; Rihan, F.A.; Shanmugam, L. Stabilization of delayed Cohen-Grossberg BAM neural networks. Math. Methods Appl. Sci. 2018, 41, 593–605. [Google Scholar] [CrossRef]
- Guo, R.; Zhang, Z.; Liu, X.; Lin, C. Existence, uniqueness, and exponential stability analysis for complex-value d memristor-base d BAM neural networks with time delays. Appl. Math. Comput. 2017, 311, 100–117. [Google Scholar]
- Zhang, Z.; Liu, X.; Guo, R.; Lin, C. Finite-time stability for delayed complex-valued BAM neural networks. Neural Process. Lett. 2018, 48, 179–193. [Google Scholar] [CrossRef]
- Gunasekaran, N.; Syed Ali, M. Design of stochastic passivity and passification for delayed BAM neural networks with Markov jump parameters via non-uniform sampled-data control. Neural Process. Lett. 2021, 53, 391–404. [Google Scholar] [CrossRef]
- Yan, M.; Jian, J.; Zheng, S. Passivity analysis for uncertain BAM inertial neural networks with time-varying delays. Neurocomputing 2021, 435, 114–125. [Google Scholar] [CrossRef]
- Xing, L.; Zhou, L. Polynomial dissipativity of proportional delayed BAM neural networks. Int. J. Biomath. 2020, 13, 2050050. [Google Scholar] [CrossRef]
- Chandran, S.; Ramachandran, R.; Cao, J.; Agarwal, R.P.; Rajchakit, G. Passivity analysis for uncertain BAM neural networks with leakage, discrete and distributed delays using novel summation inequality. Int. J. Control. Autom. Syst. 2019, 17, 2114–2124. [Google Scholar] [CrossRef]
- Saravanakumar, R.; Rajchakit, G.; Ali, M.S.; Joo, Y.H. Exponential dissipativity criteria for generalized BAM neural networks with variable delays. Neural Comput. Appl. 2019, 31, 2717–2726. [Google Scholar] [CrossRef]
- Sowmiya, C.; Raja, R.; Cao, J.; Rajchakit, G.; Alsaedi, A. Enhanced robust finite-time passivity for Markovian jumping discrete-time BAM neural networks with leakage delay. Adv. Differ. Equ. 2017, 2017, 318. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.; Cao, J. Finite-time synchronization for fuzzy inertial neural networks by maximum-value approach. IEEE Trans. Fuzzy Syst. 2021. [Google Scholar] [CrossRef]
- Wang, Z.; He, H. Asynchronous quasi-consensus of heterogeneous multiagent systems with nonuniform input delays. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 2815–2827. [Google Scholar] [CrossRef]
- Wang, Z.; Jin, X.; Pan, L.; Feng, Y.; Cao, J. Quasi-synchronization of delayed stochastic multiplex networks via impulsive pinning control. IEEE Trans. Syst. Man Cybern. Syst. 2021, 1–9. [Google Scholar] [CrossRef]
- Wang, Z.; He, H.; Jiang, G.-P.; Cao, J. Quasi-Synchronization in heterogeneous harmonic oscillators with continuous and sampled coupling. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 1267–1277. [Google Scholar] [CrossRef]
- Saker, S.; Kenawy, M.; AlNemer, G.; Zakarya, M. Some fractional dynamic inequalities of Hardy’s type via conformable calculus. Mathematics 2020, 8, 434. [Google Scholar] [CrossRef] [Green Version]
- Anbuvithya, R.; Mathiyalagan, K.; Sakthivel, R.; Prakash, P. Non-fragile synchronization of memristive BAM networks with random feedback gain fluctuations. Commun. Nonlinear Sci. Numer. Simul. 2015, 29, 427–440. [Google Scholar] [CrossRef]
- Zhang, Z.; Cao, J. Novel finite-time synchronization criteria for inertial neural networks with time delays via integral inequality method. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 1476–1484. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, A.; Hua, S. Finite-time synchronization for delayed complex-valued neural networks via integrating inequality method. Neurocomputing 2018, 318, 248–260. [Google Scholar] [CrossRef]
- Zhang, Z.; Chen, M.; Li, A. Further study on finite-time synchronization for delayed inertial neural networks via inequality skills. Neurocomputing 2020, 373, 15–23. [Google Scholar] [CrossRef]
- Kuang, J. Applied Inequalities, 3rd ed.; Shandong Science and Technology Press: Jinan, China, 2004. [Google Scholar]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Z.; Zhang, Z. Finite-Time Synchronization Analysis for BAM Neural Networks with Time-Varying Delays by Applying the Maximum-Value Approach with New Inequalities. Mathematics 2022, 10, 835. https://doi.org/10.3390/math10050835
Yang Z, Zhang Z. Finite-Time Synchronization Analysis for BAM Neural Networks with Time-Varying Delays by Applying the Maximum-Value Approach with New Inequalities. Mathematics. 2022; 10(5):835. https://doi.org/10.3390/math10050835
Chicago/Turabian StyleYang, Zhen, and Zhengqiu Zhang. 2022. "Finite-Time Synchronization Analysis for BAM Neural Networks with Time-Varying Delays by Applying the Maximum-Value Approach with New Inequalities" Mathematics 10, no. 5: 835. https://doi.org/10.3390/math10050835