
Infinite–Dimensional Bifurcations in Spatially Distributed Delay Logistic Equation


Regional Scientific and Educational Mathematical Center, Yaroslavl State University, 150003 Yaroslavl, Russia
Mathematics 2022, 10(5), 775; https://doi.org/10.3390/math10050775
Submission received: 22 January 2022
/
Revised: 21 February 2022
/
Accepted: 25 February 2022
/
Published: 28 February 2022
(This article belongs to the Topic Dynamical Systems: Theory and Applications)
Abstract
:This paper investigates the questions about the local dynamics in the neighborhood of the equilibrium state for the spatially distributed delay logistic equation with diffusion. The critical cases in the stability problem are singled out. The equations for their invariant manifolds that determine the structure of the solutions in the equilibrium state neighborhood are constructed. The dominant bulk of this paper is devoted to the consideration of the most interesting and important cases of either the translation (advection) coefficient is large enough or the diffusion coefficient is small enough. Both of this cases convert the original problem to a singularly perturbed one. It is shown that under these conditions the critical cases are infinite–dimensional in the problems of the equilibrium state stability for the singularly perturbed problems. This means that infinitely many roots of the characteristic equations of the corresponding linearized boundary value problems tend to the imaginary axis as the small parameter tends to zero. Thus, we are talking about infinite–dimensional bifurcations. Standard approaches to the study of the local dynamics based on the application of the invariant integral manifolds methods and normal forms methods are not applicable. Therefore, special methods of infinite–dimensional normalization have been developed which allow one to construct special nonlinear boundary value problems called quasinormal forms. Their nonlocal dynamics determine the behavior of the initial boundary value problem solutions in the neighborhood of the equilibrium state. The bifurcation features arising in the case of different boundary conditions are illustrated.
Keywords:
nonlinear local dynamics; stability; asymptotic behavior; quasinormal form; bifurcations; characteristic equationMSC:
34K111. Introduction
We consider the spatially distributed delay logistic equation
with the periodic boundary conditions
The coefficient is called the diffusion coefficient or the mobility coefficient when it comes to a biological population. The coefficient is called the Malthusian coefficient and is the delay time. The presence of the translation operator in the boundary value problem (1), (2) differs from the logistic equation with diffusion. The coefficient b in this operator can be considered positive. The function makes sense of the population density and therefore . The translation operator is irrelevant for the boundary value problem without delay
It ‘disappears’ after the spatial variable replacement .
An equation of the (1) type arises in many applied problems of mathematical ecology and mathematical biology (see, for example, [1,2,3,4,5,6,7]). The most complete research results are presented in [8,9,10].
In this paper, we study the local dynamics of the boundary value problem (1), (2) in a neighborhood of a positive equilibrium state, that is, the behavior of the (1), (2) solutions with initial conditions from some sufficiently small neighborhood of the equilibrium state . We fix the space as the space of initial conditions. We pay special attention to the study of cases when either the translation coefficient b is sufficiently large or the diffusion coefficient is sufficiently small. It is in these cases that the boundary value problem (1), (2) becomes singularly perturbed, which can lead to the appearance of new interesting dynamic effects.
We recall the well-known (see, for example, [11,12]) results for the delay logistic equation
Under the condition , the equilibrium state is asymptotically stable, and it is unstable when and there is a stable cycle in (4). The asymptotic behavior of this cycle under the condition is given in [13]. Questions about the global stability of Equation (4) are studied in [11,12,14].
Under the condition , the asymptotic stability of the cycle is described in [15]. We recall a well-known result of the Andronov–Hopf bifurcation in (4) under the conditions . We fix the values and in (4) so that . Let
where is a small positive parameter:
Then in some sufficiently small and independent neighborhood of Equation (4) solution there exists [16,17,18] a stable local invariant integral two-dimensional manifold on which Equation (4) can be written in the form of a scalar complex ordinary differential equation
to within . Here, is a ‘slow’ time and
Equation (6) is called the normal form for (1), (2) in the neighborhood of . The solutions (6) and (4) are related by the asymptotic equality
Under the conditions (5) and for , the same manifold is a stable invariant manifold for the delay logistic equation with diffusion
Therefore, the equilibrium state of is stable as and is unstable as for this equation, and the same cycle as in Equation (4) exists. The cycle bifurcation for (4) and (8) is of the Andronov–Hopf type [10,19]. There is only one pair of pure imaginary roots, whereas other roots of the characteristic equations for the linearized on equations have negative real parts as .
We get back to the boundary value problem (1), (2) consideration. Its local dynamics in the equilibrium state of neighborhood depend largely on the behavior of solutions of the linearized on boundary value problem
In turn, the behavior of Equation (9) solutions is related to the location of the roots of its characteristic quasi-polynomial, which consists of the set of the equations
In the case when the roots of (10) have negative real parts, all the solutions of (9) tend to zero as and the equilibrium state of is asymptotically stable in (1), (2). However, if a root with a positive real part exists in (10), then (9) has a solution that grows exponentially as and the solution of in (1), (2) is unstable.The critical case in the problem of stability takes place under the condition that (10) has no roots with positive real part, but a root with zero real part exists.
In this paper, we focus our attention on the determination of the parameters for which critical cases take place and on the study of the (1), (2) solutions in near-critical situations.
Below we show that the bifurcation phenomena are much more complicated and diverse for the boundary value problem (1), (2) than those that take place for the boundary value problem (8). In the case of singular perturbations when or some interesting situations may arise when infinitely many roots of the characteristic Equation (10) tend to the imaginary axis as the small parameter tends to zero. Thus, the critical case of infinite dimension is realized in the problem of the solutions stability. Note that singular perturbations in a nonlocal setting were studied, for example, in [20,21,22].
Special nonlinear equations that do not contain small parameters are constructed as the main results. Their nonlocal dynamics determine the behavior of the boundary value problem (1), (2) solutions in the neighborhood of the equilibrium state of . These equations are classical normal forms on invariant manifolds in finite-dimensional critical cases. There are no invariant manifolds in infinite-dimensional critical cases, but the formal method of normal forms allows us to construct special boundary value problems of the parabolic type, the so-called quasinormal forms, which play the role of normal forms. Asymptotic formulas that couple the solutions of the initial problem and the solutions of the quasinormal forms are given.
In the next section, the critical cases are defined on the basis of the characteristic Equation (10) roots analysis, and the bifurcations when the parameter b is changed are studied. Moreover, main attention is paid to the singularly perturbed case when . The most interesting situations that arise at asymptotically small values of the diffusion coefficient d are considered in Section 3. The infinite-dimensional bifurcations for the Dirichlet boundary conditions with sufficiently large values of the delay coefficient are considered in Section 4. Finally, the conclusions are formulated in Section 5.
2. Determined by Translation Coefficient b Bifurcations
In this section, we first focus on the analysis of the characteristic Equation (10) roots, and then we consider the bifurcation problem of constructiong a normal form. In the final part, we investigate the dynamics of the boundary value problem (1), (2) for large values of b.
2.1. Linear Analysis
We assume where to construct the boundaries of the stability domain in the space of parameters of Equation (10) for some . We obtain from (10) that
This equation is equivalent to the system of two equations
2.1.1. Case of
From (10) we obtain the equation
which is a well-known characteristic equation for the classical delay logistic equation. Therefore, we conclude that there is a root with a positive real part in (14) and hence in (10) under the condition .
Below we assume that the inequality
holds.
There is a pair of the complex conjugate roots for and the other roots of (14) have negative real parts.
2.1.2. Case of
We state one simple proposition first.
Lemma 1.
Let the inequalities
hold. Then the roots of Equation (10) have negative real parts.
We consider the case where and . It then follows from (12) that the equality holds for some integer n, and from (13) we obtain that . Below, let stand for such a value of the parameter T that for the roots of (10) have negative real parts for the given k, and there is a root on the imaginary axis as . Thus, , and under the condition the equality holds.
Further, we consider the case where
Under this condition and for all values of the parameters b and T, the roots of all of Equation (10) have negative real parts as . From (12), (13) we conclude that
We note that and , therefore there is such that . In this case, each element of Equation (10) has pure imaginary roots as and . For example, the equality holds as . Thus, , and as , i.e., .
2.1.3. Case of
Let and the inequality
holds. Acting in accordance with the previous scheme, we obtain that
Let stand for the largest integer for which the inequality holds.
We assume that
Lemma 2.
It is important to note that the parameter T increment from to in the boundary value problem (9) can lead to several alternations of stability and instability of solutions.
The following statement is more interesting.
Lemma 3.
Since , we obtain two values
for . We note that . Let stand for the consecutive positive roots (in relation to T) of the equation . In addition, let stand for the consecutive positive roots of the equation . We note that , and . It is evident that the values and only are the roots of the system of Equation (10) for and , respectively. Let stand for such a root of (10) that turns into and for or , respectively. Then, for we obtain from (10) that
where as , and as . From (10), it now follows that
If then . From here we obtain the following statements:
The resulting domain of instability (in the space of parameters) of the characteristic Equation (10) is an union of the instability domains of each of the equations that make up (10). Thus, a situation is possible when this domain consists of one or several (because their number is finite) intervals.
2.2. Andronov–Hopf Bifurcation
Let for some and (the case of is studied in [19]) the characteristic Equation (10) has one pure imaginary root , whereas all the other roots have negative real parts (as ). We assume and let the equalities (5) hold. We consider the behavior of the (8) solutions with initial conditions from some rather small (–independent) neighborhood of the equilibrium state . According to the general theory (see, for example, [16,17,18]) in this neighborhood there is a local invariant two-dimensional stable integral manifold on which (8) can be presented as a normal form
to within . We put to obtain explicit expressions for the coefficients and , and introduce the formal series
Substituting (18) into (1) and collecting the coefficients at the equal powers of we obtain in the second step that
From the solvability condition of the resulting equation with respect to (and ), we arrive at a relation for the unknown value , which has the form of (17) in which
We note that the sign of the value coincides with the sign of the expression .
2.3. Local Dynamics in the Case of Large Translation Coefficient
Here we assume that the parameter b is large enough:
It then follows from equality (13) that the quantity is of the order of , and the corresponding values of T at which the stability of the equilibrium state can change are of the order of . In this regard, it is natural to set and change the time in (1). Below, it is convenient to replace u with in (1). Then the corresponding boundary value problem with respect to after multiplying by of the left and right parts can be written in the form
Formally assuming , we arrive at a linear equation whose entire stability spectrum is pure imaginary. Thus, the critical case of infinite dimension is realized in the problem of the equilibrium state of (20), (21) stability. An algorithm for studying the dynamic properties of solutions in such situations is developed in [23,24]. We apply the corresponding constructions for (20), (21). We introduce the formal expression
Substituting this expression into (20), (21) and performing standard operations, we obtain the boundary value problem with respect to
Theorem 1.
We note that the boundary value problem (22), (23) plays the role of a quasinormal form for (20), (21) and does not contain time delay but contains a deviation of the spatial variable.
Further, we consider the issue of the (22), (23) local dynamics in the equilibrium state of neighborhood. The characteristic equation of the linearized at zero problem has the form
In the case when the roots of this equation have negative real parts, the equilibrium states of in (22), (23) and of in (20), (21) are asymptotically stable for small , and the solutions from some independent neighborhood of these equilibrium states tend to zero as . If (24) has a value of with positive real part, then and are unstable, and the problem of dynamic behavior in the equilibrium state neighborhood becomes nonlocal. Below, we assume that for some integer and , Equation (24) has the pure imaginary root . All the other roots of (24) have negative real parts as .
We introduce another small parameter , which characterizes the deviation from : . In this case, a two–dimensional local invariant integral stable manifold exists in a small neighborhood of zero in (20), (21) and in (22), (23), on which the boundary value problem (22), (23) can be presented as a normal form
to within .
Repeating the constructions of the previous section, we introduce into consideration a formal expression of the form (18):
where . We substitute (26) into (22), (23) and consecutively find that
We summarize what has been said.
Theorem 2.
Let Equation (25) have the bounded solution as . Then the function
It remains to be noted that the stability of the zero equilibrium state in (22), (23) is determined by the sign of the quantity , and the existence and stability of the nonzero cycle in (25) and in (20), (21) are determined by the signs of the quantities and .
We dwell on some of the conclusions. The presence of advection in the distributed logistic equation with diffusion significantly complicates the dynamic properties of the solutions. Bifurcation phenomena (which are based on the Andronov–Hopf bifurcation) begin to occur at lower values of the delay coefficient. The possibility of stabilization of the equilibrium state as delay increases is shown. In the problem of the stability of a positive equilibrium state an infinite-dimensional critical case can be realized for sufficiently large values of the advection (translation) coefficient. This critical case can occur even at asymptotically small values of delay. It is shown that the corresponding bifurcations occur at high frequencies and on asymptotically large modes. Thus, rapid oscillations arise both with respect to the spatial variable and with respect to time. A special nonlinear parabolic equation with the deviation of the spatial variable that does not contain large and small parameters is constructed. Its nonlocal dynamics determine the behavior of the initial equation solutions in a small neighborhood of the equilibrium state.
3. Equations with Small Diffusion Coefficient
The dynamic features of equations with low diffusion are even more interesting and varied. The assumption that the values of the diffusion coefficient are small is natural. In mathematical ecology, it is the mobility coefficient divided by the length of the habitat, which often has relatively large dimensions. In many problems of physics and mechanics, the values of the diffusion coefficient are also quite small in normalized units.
Therefore, we consider the delay logistic equation with diffusion
with the periodic boundary conditions
We assume
i.e., the diffusion coefficient is small enough. We investigate the dynamic properties of these boundary value problem solutions in some small enough and independent neighborhood of the equilibrium state of .
The structure of the solutions may differ significantly depending on the value of the translation coefficient. Four cases are considered separately. In the first of them, the coefficient b is of the same order as the diffusion coefficient, i.e., for some fixed value we obtain
This case is covered in Section 3.1. A much more complicated situation is considered next in Section 3.2 when the parameter b is sufficiently small again but is greater that the diffusion coefficient with respect to the order, i.e.,
We note at once that under this condition, the biffurcations occur on the modes with asymptotically large numbers.
Section 3.3 considers the case when the parameter b does not depend on . The peculiarity of this case is that bifurcations occur at high modes as well as in Section 3.2, but the delay coefficient is asymptotically small in this case. Section 3.4 reveals the features of the case when the condition
holds together with condition (29).
In each of these cases, the bifurcation values of the parameters are determined and quasinormal forms are constructed to analyze the dynamics of solutions.
3.1. Quasinormal Forms Construction under Condition
Let . The set of the equations
plays the role of the characteristic equation for the linearized in boundary value problem
We formulate several simple statements regarding the roots of (33). We omit their simple but cumbersome proofs.
Lemma 4.
Let the condition hold. Then, for all sufficiently small ε, the real parts of the (33) roots are negative and separated from zero as .
Lemma 5.
Let the condition hold. Then, for all sufficiently small ε, there exists a root with positive real part separated from zero as .
Lemma 6.
Let
Then, there are no roots with positive real part separated from zero in (33) as , but there are infinitely many roots , the real parts of which tend to zero for each k, and the asymptotic representations
take place as .
We note that for and for the situation for (33) is the same as for the characteristic equation
of the linearized Equation (4)
Only one pair of (36) roots lies on the imaginary axis as , and for (33) infinitely many (35) roots tend to the imaginary axis as . Thus, the critical case is realized in the problem of the stability of solutions of (34) of infinite dimension.
The solutions
of the boundary value problem (34) correspond to the roots . Therefore, the boundary value problem (34) has the set of solutions
where are the arbitrary constants. This expression can be written as
Here, is a slow time, , are the Fourier coefficients of the function .
Applying the methodology from [23], we find the solutions of (27), (28) in the form
The function is the unknown amplitude, are –periodic with respect to t and –periodic with respect to x.
We substitute the formal expression (37) into (27) and sequentially equate the coefficients at equal powers of in the resulting formal identity. We obtain the correct equality for . Collecting the coefficients at we obtain the equation
for determining. From here
where
At the next step, we collect the coefficients at and obtain the equation for . From the condition of its solvability in the indicated class of functions, we obtain the boundary value problem for determining:
The formula
holds for the Lyapunov quantity , and .
We state the basic result of this section.
Theorem 3.
Remark 1.
It can be shown that if the boundary value problem (39) has a periodic with respect to τ solution and certain conditions of nonsingularity type hold, then the initial boundary value problem has an almost periodic solution of the same stability with the asymptotic behavior indicated in Theorem 3.
3.2. Construction of Quasinormal Forms under Condition
The results of this section are the most complicated and interesting. First, we dwell on the linear analysis.
3.2.1. Linear Analysis
In this section, we fix arbitrarily the positive values and r and write out the characteristic Equation (33) in the form
where , . Let stand for the root of this equation with the largest real part. We recall that the equality holds as , therefore for all . At the first step, we find the smallest positive value of the parameter T for which , and there exists that . We show below that is uniquely defined. We put . Further, we write out the system of equations for the unknown quantities and . Initially, from the condition and from Equation (40) we obtain that
From the condition
we arrive at the equality
Taking this into consideration, we obtain from (42) that
Then, from here we obtain the equation with respect to the quantity :
Now, we find that the equality
holds for the positive root of the equation above. Finally, taking into account (42) and the first of the equalities (41), we obtain the equation to determine :
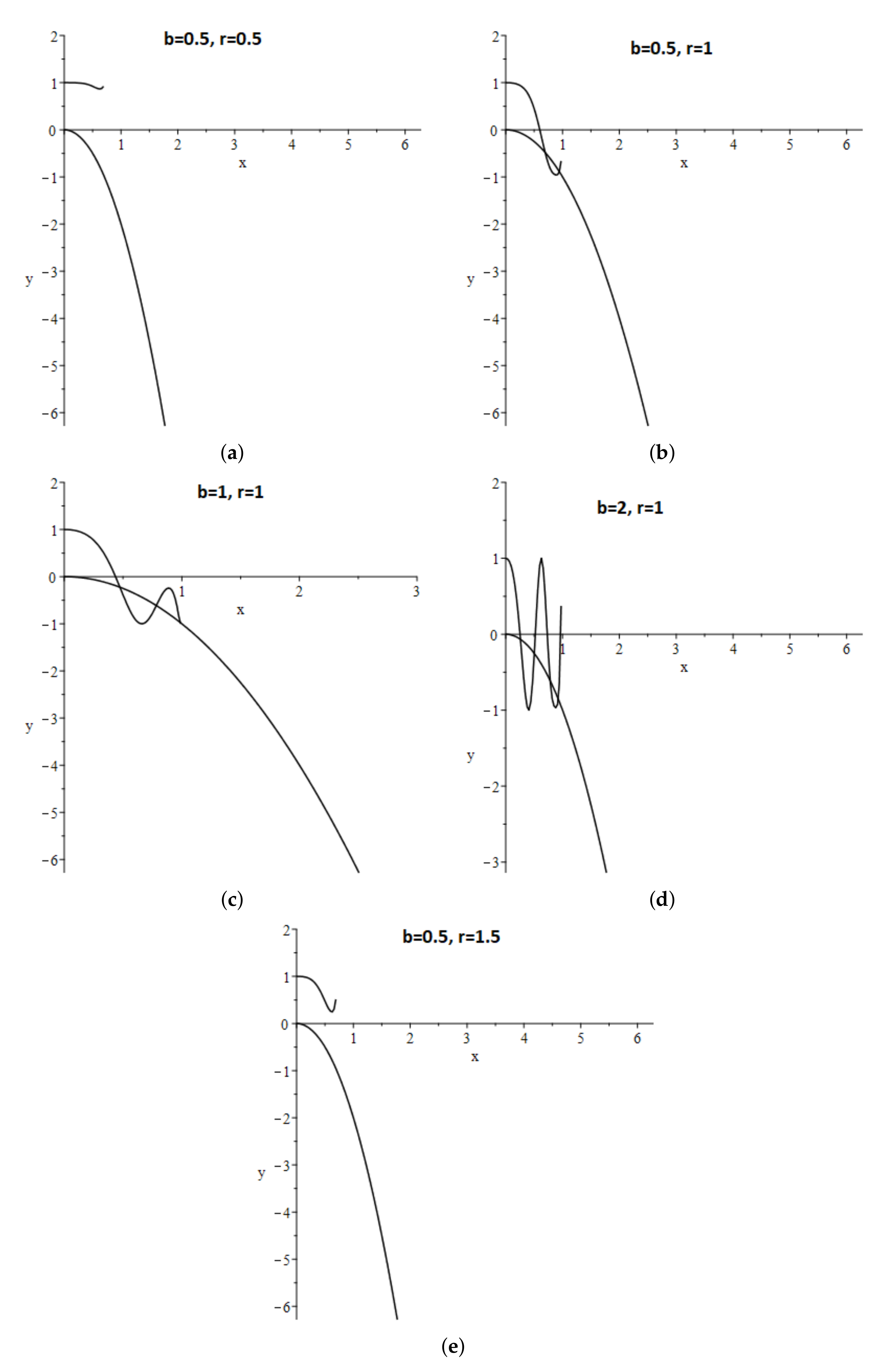
After the roots of this equation have been found for those r and for which they exist, we obtain the desired value . Figure 1 shows the graphs of the left and right sides of Equation (45).
The main difference between the results of this and the previos sections is that here, and the value , at which the critical case is realized, is positive.
We consider a set of integers
where the quantity complements the expression to an integer value. We assume in (40) that and let and stand for those roots of (40), the real parts of which tend to zero as . The following simple statement holds.
Lemma 7.
For the asymptotic equalities
hold where
It is important to note that infinitely many roots of the characteristic Equation (40) tend to imaginary axis as . This gives grounds to say that the critical case under consideration has an infinite dimension in the stability problem.
The root corresponds to the solution of the linearized equation and
which means that the same equation has a set of solutions
where are arbitrary complex constants. Let . Then (46) can be presented in the form
Here, we have the equality
for the Fourier coefficients of the function .
Further constructions are based on the representation (47).
3.2.2. Construction of Quasinormal Form
For fixed r and and under the conditions (29), (31) we define , and . We assume that
in (27), (28) and let stand for the function
We introduce into consideration the formal asymptotical series
Here, are the unknown complex amplitudes. The functions are –periodic with respect to t and –periodic with respect to y. We search for solutions of the nonlinear boundary value problem (27), (28) in the form of (48). For this purpose we substitute (48) into (27) and equate the coefficients at the same powers in the resulting formal identity. At the first step, we obtain the correct equality by collecting the coefficients at the first power of . Collecting the coefficients at we obtain the equation for . We search for in the form
Then, we immediately get that
At the next step, we obtain the equation for :
. The explicit form of the functions is inessential, so we do not write them out. We obtain the formula
for the function where
The satisfaction of the equality
is the condition of the solution of the equation for existence in the indicated class of functions, i.e.,
In order to formulate the basic result of this section, we introduce one more notation. Let stand for the sequence that tend to zero as , and the equality
holds for all n.
Theorem 4.
3.3. Quasinormal Forms for Fixed Value and for Sufficiently Small
In this section, we first define the smallest positive value of the delay coefficient such that the zero equilibrium state in (27), (28) is asymptotically stable for , but unstable for . At the next stage, in the critical case of , we construct a quasinormal form for the local dynamics study.
It is convenient to perform a change
in (27), (28). As a result, we obtain the boundary value problem with delay and deviation of the spatial variable
3.3.1. Linear Analysis
Here, we put
and show that there exists a value such that for small the zero equilibrium state in (51), (52) is asymptotically stable under the condition , but unstable for .
Under the condition (53), we consider the characteristic equation for the linearized boundary value problem (51), (52):
where . For small , it is natural to start the study with a simpler equation (for )
Let for some and for all . Then,
Hence we obtain that for
Therefore, . Let stand for the smallest positive root of this equation. Then the equality
holds, which means
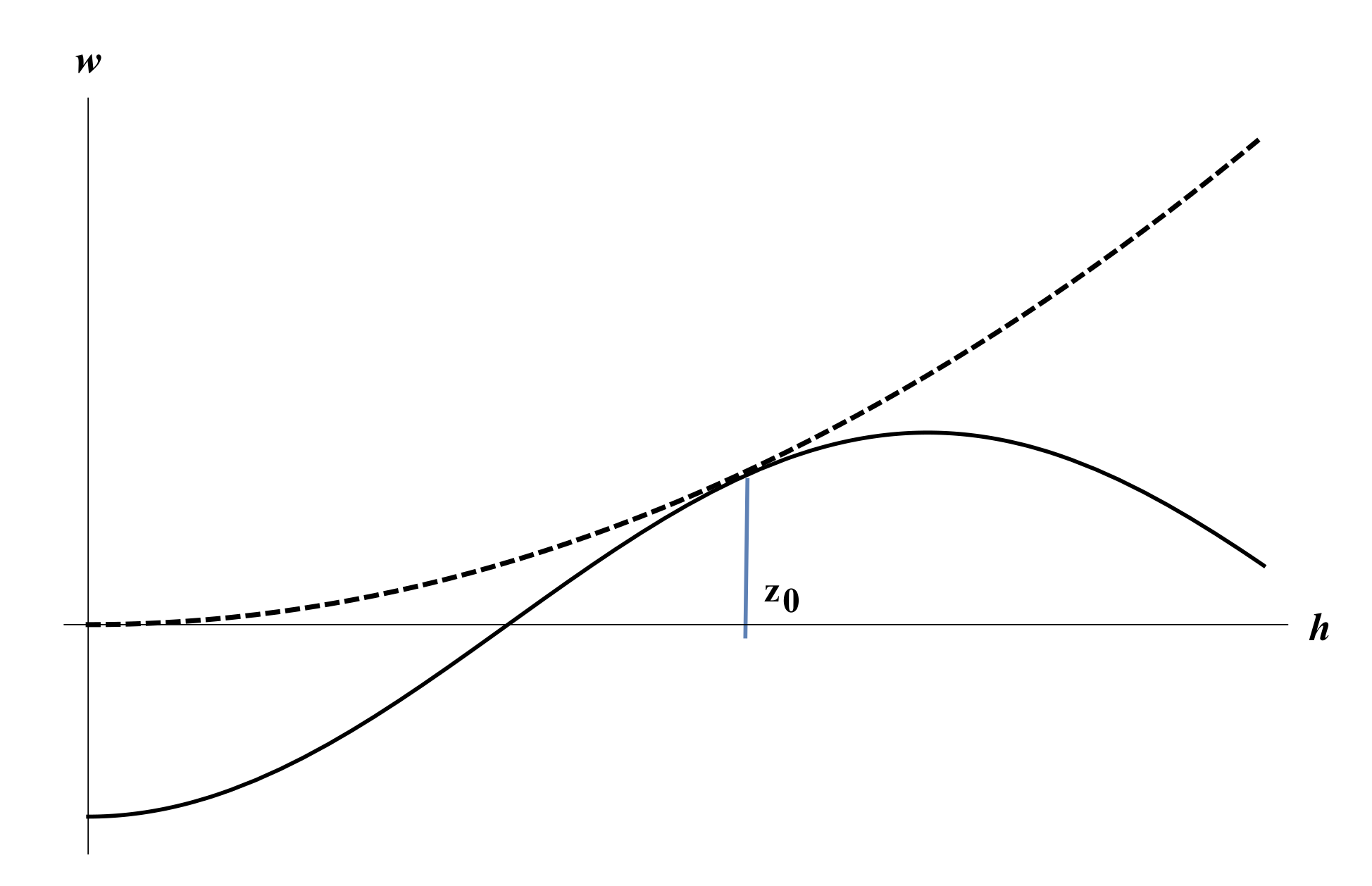
Figure 2 shows the graphs of the functions and . It is shown that these graphs have tangency at , i.e., .
At the next stage, we return to the consideration of the characteristic Equation (54). We look for such a value of to within for which the root of this equation (with the largest real part) satisfies the conditions , and . Let , , . We write out the values , , and . For this purpose, we introduce the matrix
We assume . Then , , .
Let complement the expression to an integer value. Under this condition and for , we consider the asymptotics of all those roots of Equation (54), whose real parts tend to zero as .
We fix arbitrarily the value . Let
Lemma 8.
The asymptotic equalities
hold where
3.3.2. Nonlinear Analysis
In the case under consideration, the formal representation of the nonlinear boundary value problem (27), (28) solutions is based on formula (58) for the linearized problem solutions. Therefore, we introduce into consideration the asymptotic expression
to construct a quasinormal form.
As in Section 3.2.2, we obtain here
Substituting (59) into (27) and performing standard operations, we obtain the equalities
first. At the next step, we get the equation for . Expressions for , , and are simply defined, and the condition of solvability of the equation for leads to the relations
For the value the equality
holds. The next statement follows from the above constructions.
Theorem 5.
3.4. Quasinormal Form in the Case of Low Diffusion and Large Translation Coefficient
This case is simpler than the one discussed in the previous section.
Let , i.e., the parameter satisfies the condition
In this case, the threshold value of the parameter T is determined by the condition
This means that it is an order of magnitude less than in (53). Then, the characteristic equation has the form
The equation of first approximation
defines the behavior of the roots (63) with higher precision (compared to (54)) near the imaginary axis. The formulas (56) and (57) in which the parameter b should be replaced by 1 are correct. The resulting quasinormal form coincides with (60), (61) for , .
3.5. On Dynamics of Delay Logistic Equation with Small Diffusion and Classical Boundary Conditions of General Form
We consider the problem of the local dynamics of the delay logistic equation with small coefficients of diffusion and advection
with the boundary conditions
All coefficients in (64), (65) are real, , , and is a small positive parameter:
The construction of the characteristic equation for the linearized at zero boundary value problem
is related to the eigenvalues of the stationary boundary value problem
All eigenvalues of this boundary value problem are real and can be arranged in descending order. The corresponding to eigenfunctions are also real. We note that they form a complete set in the corresponding space.
We consider the question of the roots of the quasipolynomial
for each number j. Here are some standard statements.
Lemma 9.
Let . Then, for all sufficiently small ε, the real parts of Equation (70) roots are negative and separated from zero as .
Lemma 10.
Let . Then, for all sufficiently small ε, Equation (70) has a root with positive and separated from zero real part as .
Lemma 11.
Equation (70) has a pair of complex roots for each and
All other roots of this equation have negative real parts and are separated from zero as .
Below we assume that the equality
holds for an arbitrarily fixed value .
The linear boundary value problem (67), (68) has a set of solutions
where are arbitrary, and the Fourier coefficients of the function have the form .
Based on this representation of ‘critical’ solutions of the linear problem (67), (68), we look for the nonlinear boundary value problem (64), (65) solutions in the form
Here and below, let stand for the expression that is a complex conjugate to the previous term. The unknown function is sufficiently smooth and satisfies the boundary conditions (65). The dependence on the argument t on the right-hand side of (72) is –periodic.
We substitute expression (72) into (64) and collect the coefficients at the same powers of . We obtain the correct equality for the first degree of . At the next step, we obtain the equation
for . From this we find that
However, the boundary conditions (65) for the function , generally speaking, are not satisfied. In order to satisfy these boundary conditions for the terms of order, we look for the expression for in (72) in the form
where , . All functions are –periodic with respect to the variable t, and each of the functions and is exponentially decreasing with respect to its third argument: for some and the evaluations
are satisfied. We substitute
into (64), (65). Then, we obtain the relations
for the degree in the boundary conditions (65). Taking into account equality (73) here, we find that
We take one more step. We write down the relation for the coefficients of that is obtained after substituting (74) into (64):
Here the following notation is adopted:
It is natural to look for the functions appearing in (80) in the form
Then, from the Equation (80) we arrive at the system of four equations
We conclude from (81) that
We obtain from (82) that
and
From (83) and conditions (75), (78), (79) we obtain that
We denote by one of roots, whose real part is negative.
We summarize with the following statement.
Theorem 6.
Let the condition (71) be satisfied, and let be a bounded for , solution of the boundary value problem (87), (88). Let , , , and the function is defined in (73), the function is defined in (81)–(83) and in (90)–(93). Then, the function (76) satisfies Equation (64) to within , and satisfies the boundary conditions (65) to within .
4. About Infinite-Dimensional Bifurcations in the Case of Large Delay and Dirichlet Boundary Conditions
We note that the zero solution of the boundary value problem (1), (2) is unstable for sufficiently large values of the delay parameter T. However, the relaxation cycle is stable [15] in this case. Its asymptotic behavior is given in [15].
The local behavior of the (1), (2) solutions under other classical boundary conditions is determined by the roots of its characteristic equation for the linearized at zero boundary value problem. Some results for such cases are presented in [25].
4.1. Case of
First, we dwell on the simplest case of . We replace u by and consider Equation (1) with the Dirichlet boundary conditions
Its characteristic equation coincides with (10) but the values of the integers k are only the following: :
We analyse its roots. The roots of this equation have negative real parts for as . Let the condition be satisfied where
The basic assumption of this section is that , i.e.,
The dynamics of the solutions of the delay equations under the condition was studied in [26,27].
It is convenient to make the substitution in (94). Consequently, we obtain the singularly perturbed boundary value problem:
Here, we omit the index 1 for , and the characteristic equation for the boundary value problem (96), which is linearized on takes the form
We investigate the behavior of the boundary value problem (96) solutions in the zero equilibrium neighborhood under the condition (95) as
where is arbitrarily fixed.
The next statement shows that the critical case of infinite dimension is realized in the boundary value problem (96).
Lemma 12.
We note that the solutions of (94) are unstable for and for sufficiently large T.
The solution of the linearized equation
corresponds to the root . The set of the solutions can be represented as
Here , , the function is 1–antiperiodic with respect to y: . Its Fourier coefficients with respect to the variable y satisfy the formula
According to the technique from the previous sections, we seek the solutions of the nonlinear boundary value problem (97) in the neighborhood of in the form
For the sequential finding of the elements of the formal series (99), we substitute (99) into (96) and perform standard actions.
First, we obtain the equation
for . It follows that
At the next step, we obtain the boundary value problem
for . For the existence of this boundary value problem solution, it is necessary and sufficient that
where . We do not present an explicit formula for due to its inconvenience. We only note that . Hence the statement follows.
Theorem 7.
4.2. Case of
After the replacement (95) in the boundary value problem
we obtain the following boundary value problem
To obtain the characteristic equation, we first linearize this boundary value problem at zero and then set . Then we obtain the equation
with the boundary conditions
After the replacement
in (103) we obtain the equation with the Dirichlet boundary conditions
Hence, we conclude that
Now we formulate an assertion about the roots of this equation.
Lemma 13.
The critical case is realized for where
Under this condition and (98), infinitely many roots in (103) tend to the imaginary axis as , and the asymptotic equalities
hold. Here
The root corresponds to the solution of the linearized equation
Repeating the scheme from Section 4.1, we consider the formal series
where , . The function is 1–antiperiodic with respect to y:
The functions are periodic with respect to x and y. We substitute (106) into (102). Performing standard actions, we obtain the boundary value problem
for . For simplicity, we assume that . It follows that the equation has simple roots and . From (108), (109) we obtain that
where
At the next step, we obtain the boundary value problem
to find .
The equality to zero of the integral with respect to x from 0 to 1 from the right-hand side is the condition for the existence of a solution of this boundary value problem with respect to . Hence, we conclude that the function is a solution of the boundary value problem
where . Theorem 7 holds for this boundary value problem.
4.3. Extending the Results to Other Boundary Conditions
As an example, we consider the boundary value problem
with the boundary conditions
Here all the coefficients are real. We agree to assume that the notation corresponds to the boundary condition , and the notation corresponds to the condition .
We note that the eigenvalues of the linear boundary value problem
with the boundary conditions (111) are real. They can be numbered in descending order , and the eigenvalue corresponds to the eigenfunction , which is positive on the interval .
Let in (110). We consider the equation
Here are some simple statements.
Lemma 14.
Let . Then, for all sufficiently small ε, Equation (113) roots have negative real parts separated from zero as .
Lemma 15.
Let . Then, for all sufficiently small ε, Equation (113) has a root with a positive real part separated from zero as .
The behavior of the roots of (113) in the critical case is described by the following statement.
Lemma 16.
Let . Then Equation (113) has no roots with positive and separated from zero real parts as , but has infinitely many roots for which the following asymptotic equalities hold:
The construction of quasinormal forms in each of the cases (114) and (115) is based on the formal asymptotic equality
where , . The function is 1–periodic with respect to y in the case of (114), and is 1–antiperiodic with respect to y in the case of (115). The functions are 1–periodic with respect to y in the case of (114). The function is 1–antiperiodic with respect to y in the case of (115).
We introduce several notations before formulating the resulting statements. Let stand for the solution of the conjugate to Equation (112)
for with the boundary conditions
Let the normalization requirement
holds. We note that the satisfaction of the equality
is the condition for the existence of the boundary value problem
solution. Let stand for this solution. An explicit formula for this expression is not given here.
We put , .
Theorem 8.
The dynamic properties of the boundary value problem (117), (118) are rather simple: as , its solutions tend to one of the equilibrium states or or have an infinite limit.
The case of is more interesting. Here, let stand for the (unique) solution of the boundary value problem
Theorem 9.
The boundary value problem (112), (111) is self-adjoint (see, for example, [28]). The situation can be much more complicated for not self-adjoint boundary value problems. We briefly demonstrate it with one example.
We consider the question of local dynamics of the boundary value problem with cubic nonlinearity
The characteristic equation for the boundary value problem linearized at zero has the form
where k takes all odd values , .
For we obtain the equation
We formulate several simple statements.
Lemma 17.
Lemma 18.
Lemma 19.
Let
Then Equation (124) has no root with positive real part separated from zero as , but has infinitely many roots
whose real parts tend to zero as . For each m the asymptotic equalities
hold where . complements the expression to an integer multiple of .
According to the above technique, we look for the asymptotics of the nonlinear boundary value problem (121), (122) solutions in the form
where , , and the functions are periodic with respect to , and y. We substitute (126) into (121) and perform standard actions to find the amplitude . We obtain the boundary value problem
This boundary value problem plays the role of a normal form for (121), (122). Thus, the leading terms of the asymptotics of the solutions of (121), (122) with small enough initial conditions with respect to the norm (in the space ) are reconstructed from its solutions with the help of the formula (126).
Remark 2.
In Section 4.1 and Section 4.2, the ‘critical’ values of the parameter r are determined by the equality . In this section, the role of the eigenvalue is played by the quantity . Here, the critical value of the parameter r is determined by the equality . If in Section 4.1 and Section 4.2 the solutions of the initial boundary value problem (110), (111) are formed according to the formula (116) at relatively low frequencies, then in this section the corresponding frequencies are relatively large of the order of .
We note also that if we have the periodicity condition instead of antiperiodic boundary conditions, then . Therefore, for each , the solutions of (110) are unstable for small .
5. Conclusions
The bifurcation problems for the delay logistic equation with diffusion and advection are considered. The most important results relate to the cases of singular perturbations when either the diffusion coefficient is small enough, the translation coefficient is large enough, or the delay coefficient is large enough. A distinctive feature of these situations is that the critical cases in the problem of the stability of the equilibrium state have infinite dimension. This leads to the fact that the constructed quasinormal forms (infinite-dimensional analogs of classical normal forms) are the distributed equations with an infinite-dimensional phase space.
For example, in a problem with a large translation coefficient, such equations are the equations with diffusion and with deviation of the spatial variable. In the problems with small diffusion or in problems with large delay, they are parabolic equations of the Ginzburg–Landau type.
The algorithm for constructing the asymptotics of solutions developed is related to the algorithm for the quasinormal form construction. It is possible to pose a question of finding exact solutions of the initial boundary value problem that have the pointed asymptotics. If the quasinormal form has a periodic with respect to solution and certain conditions like nondegeneracy type are satisfied, we can justify the result about the existence of an exact almost periodic solution with the constructed asymptotics and answer the question of its stability.
The threshold values of the delay coefficient at which the bifurcation phenomena occur are found. In the case when the translation coefficient is , this threshold value is of the order , i.e., the bifurcations occur even at small values of the delay.
The cases of a small diffusion coefficient are considered. Table 1 illustrates the changes of the values depending on the coefficient b. We consider the diffusion coefficient is equal to .
Thus, as the coefficient b increases, the values of decrease. Moreover, we can conclude that the parameter b increase leads to a complication of the problem dynamic properties.
It is important to note that if , then bifurcations occur on small modes of the order of 1. In other cases they occur on asymptotically large modes of the order of .
There is the parameter in many quasinormal forms that infinitely many times runs through all values from 0 to 1 as . The sequences are eliminated on which the coefficient does not change. An unlimited process of straight and reverse bifurcations alternation can occur [29] as .
In the infinite-dimensional critical case, the quasinormal form of parabolic type is constructed for the Dirichlet boundary conditions in the case of a large delay.
Because the quasinormal forms are complex evolutionary equations of the Ginzburg–Landau type, we can formulate a general conclusion that complex dynamic behavior is typical for the infinite-dimensional bifurcation problems under consideration [30]. For example, irregular dynamic processes and multistability phenomena can be observed.
The solutions of quasinormal forms allow one to determine the leading terms of asymptotic expansions of the initial boundary value problem solutions. Among them, one can differ the situations when these expansions contain rapidly and slowly oscillating components with respect to spatial and time variables.
The influence of various boundary conditions on the dynamic properties of the initial problem is illustrated.
Funding
This work was supported by the Russian Science Foundation (project no. 21-71-30011).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The author declares no conflict of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript, or in the decision to publish the results.
References
- May, R.M. Stability and Complexity in Model Ecosystems, 2nd ed.; Princeton University Press: Princeton, NJ, USA, 1974; 299p. [Google Scholar]
- Murray, J. Mathematical Biology II. In Interdisciplinary Applied Mathematics No. 18, 3rd ed.; Springer: New York, NY, USA, 1993. [Google Scholar]
- Okubo, A. Dynamical aspects of animal grouping: Swarms, schools, flocks and herds. Adv. Biophys. 1986, 22, 1–94. [Google Scholar] [CrossRef]
- Wu, J. Theory and Applications of Partial Functional Differential Equations; Springer: New York, NY, USA, 1996. [Google Scholar]
- Kuang, Y. Delay differential equations: With applications in population dynamics. Math. Sci. Eng. 1993, 191, 410. [Google Scholar]
- So, J.; Wu, J.; Yang, Y. Numerical hopf bifurcation analysis on the diffusive nicholson’s blowflies equation. Appl. Math. Comput. 2000, 111, 53–69. [Google Scholar] [CrossRef]
- Levin, S. Population Models and Community Structure in Heterogeneous Environments; Springer: New York, NY, USA, 1986. [Google Scholar]
- Gourley, S.; Sou, J.-H.; Hongc, W.J. Nonlocality of reaction-diffusion equations induced by delay: Biological modeling and nonlinear dynamics. J. Math. Sci. 2004, 124, 5119–5153. [Google Scholar] [CrossRef]
- Gourley, S.; Britton, N. A predator prey reaction diffusion system with nonlocal effects. J. Math. Biol. 1996, 34, 297–333. [Google Scholar] [CrossRef]
- Busenberg, S.; Huang, W. Stability and Hopf Bifurcation for a Population Delay Model with Diffusion. J. Differ. Equ. 1996, 124, 80–107. [Google Scholar] [CrossRef] [Green Version]
- Wright, E. A non-linear difference-differential equation. J. Die Reine Angew. Math. 1955, 194, 66–87. [Google Scholar] [CrossRef]
- Kakutani, S.; Markus, L. On the non-linear difference-differential equation y′(t) = [a − by(t − τ)]y(t). Contrib. Theory Nonlinear Oscil. 1958, 4, 1–18. [Google Scholar]
- Hassard, B.D.; Kazarinoff, N.D.; Wan, Y.H. Theory and Applications of Hopf Bifurcation, 3rd ed.; Cambridge University Press: Cambridge, UK, 1981; 385p. [Google Scholar]
- Kashchenko, S.; Loginov, D. Estimation of the region of global stability of the equilibrium state of the logistic equation with delay. Russ. Math. 2020, 64, 34–49. [Google Scholar] [CrossRef]
- Kashchenko, S. Asymptotics of the solutions of the generalized hutchinson equation. Autom. Control Comput. Sci. 2013, 47, 470–494. [Google Scholar] [CrossRef]
- Hartman, P. Ordinary Differential Equations; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 1964. [Google Scholar]
- Hale, J. Theory of Functional Differential Equations; Springer: New York, NY, USA, 1977. [Google Scholar]
- Marsden, J.E.; McCracken, M.F. The Hopf Bifurcation and Its Applications, 3rd ed.; Springer: New York, NY, USA, 1976; 421p. [Google Scholar]
- Kashchenko, S. Local Dynamics of Logistic Equation with Delay and Diffusion. Mathematics 2021, 9, 1566. [Google Scholar] [CrossRef]
- Vasileva, A.B.; Butuzov, V.F. Asymptotic Expansions of the Solutions of Singularly Perturbed Equations; Nauka: Moscow, Russia, 1973; 272p. [Google Scholar]
- Vasileva, A.B.; Butuzov, V.F. Singularly Perturbed Equations in Critical Cases; MGU: Moscow, Russia, 1978; 106p. [Google Scholar]
- Butuzov, V.F.; Vasileva, A.B.; Nefedov, N.N. Asymptotic theory of contrast structures (a survey). Autom. Remote Control. 1997, 58, 1068–1091. [Google Scholar]
- Kashchenko, S.A. The Ginzburg–Landau equation as a normal form for a secondorder difference-differential equation with a large delay. Comput. Math. Phys. 1998, 38, 443–451. [Google Scholar]
- Grigorieva, E.V.; Haken, H.; Kashchenko, S.A.; Pelster, A. Travelling wave dynamics in a nonlinear interferometer with spatial field transformer in feedback. Phys. D Nonlinear Phenom. 1999, 125, 123–141. [Google Scholar] [CrossRef]
- Kashchenko, S.; Loginov, D. Bifurcations due to the variation of boundary conditions in the logistic equation with delay and diffusion. Math. Notes 2019, 106, 136–141. [Google Scholar] [CrossRef]
- Kashchenko, S.A. Bifurcations in the Neighborhood of a Cycle under Small Perturbations with a Large Delay. Comput. Math. Math. Phys. 2000, 40, 659–668. [Google Scholar]
- Kaschenko, S.A. Normalization in the systems with small diffusion. Int. J. Bifurc. Chaos Appl. Sci. Eng. 1996, 6, 1093–1109. [Google Scholar] [CrossRef]
- Coddington, E.A.; Levinson, N. Theory of Ordinary Differential Equations; McGraw-Hill: New York, NY, USA, 1955; 429p. [Google Scholar]
- Kashchenko, I.S.; Kashchenko, S.A. Infinite Process of Forward and Backward Bifurcations in the Logistic Equation with Two Delays. NOnlinear Phenom. Complex Syst. 2019, 22, 407–412. [Google Scholar] [CrossRef]
- Akhromeeva, T.S.; Kurdyumov, S.P.; Malinetskii, G.G.; Samarskii, A.A. Nonstationary Structures and Diffusion Chaos; Nauka: Moscow, Russia, 1992; 544p. [Google Scholar]
Figure 1.
Graph of the function graph of the function with parameter values: (a) , (b) , (c) , (d) , (e) .
Figure 1.
Graph of the function graph of the function with parameter values: (a) , (b) , (c) , (d) , (e) .

Figure 2.
The dotted line is the graph of the function the solid line is the graph of the function is the point of contact.
Figure 2.
The dotted line is the graph of the function the solid line is the graph of the function is the point of contact.


{kind=link}
{kind=link}
Table 1.
The dependence of the value of on the parameter b.
| No. | The Change Order of the Value of b | Order Magnitude |
|---|---|---|
| 1 | ||
| 2 | ||
| 3 | ||
| 4 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Kashchenko, S. Infinite–Dimensional Bifurcations in Spatially Distributed Delay Logistic Equation. Mathematics 2022, 10, 775. https://doi.org/10.3390/math10050775
AMA Style
Kashchenko S. Infinite–Dimensional Bifurcations in Spatially Distributed Delay Logistic Equation. Mathematics. 2022; 10(5):775. https://doi.org/10.3390/math10050775
Chicago/Turabian StyleKashchenko, Sergey. 2022. "Infinite–Dimensional Bifurcations in Spatially Distributed Delay Logistic Equation" Mathematics 10, no. 5: 775. https://doi.org/10.3390/math10050775
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.