
Optimal Operation for Reduced Energy Consumption of an Air Conditioning System Using Neural Inverse Optimal Control

 ,
,  , ,
, ,  and
and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methodology
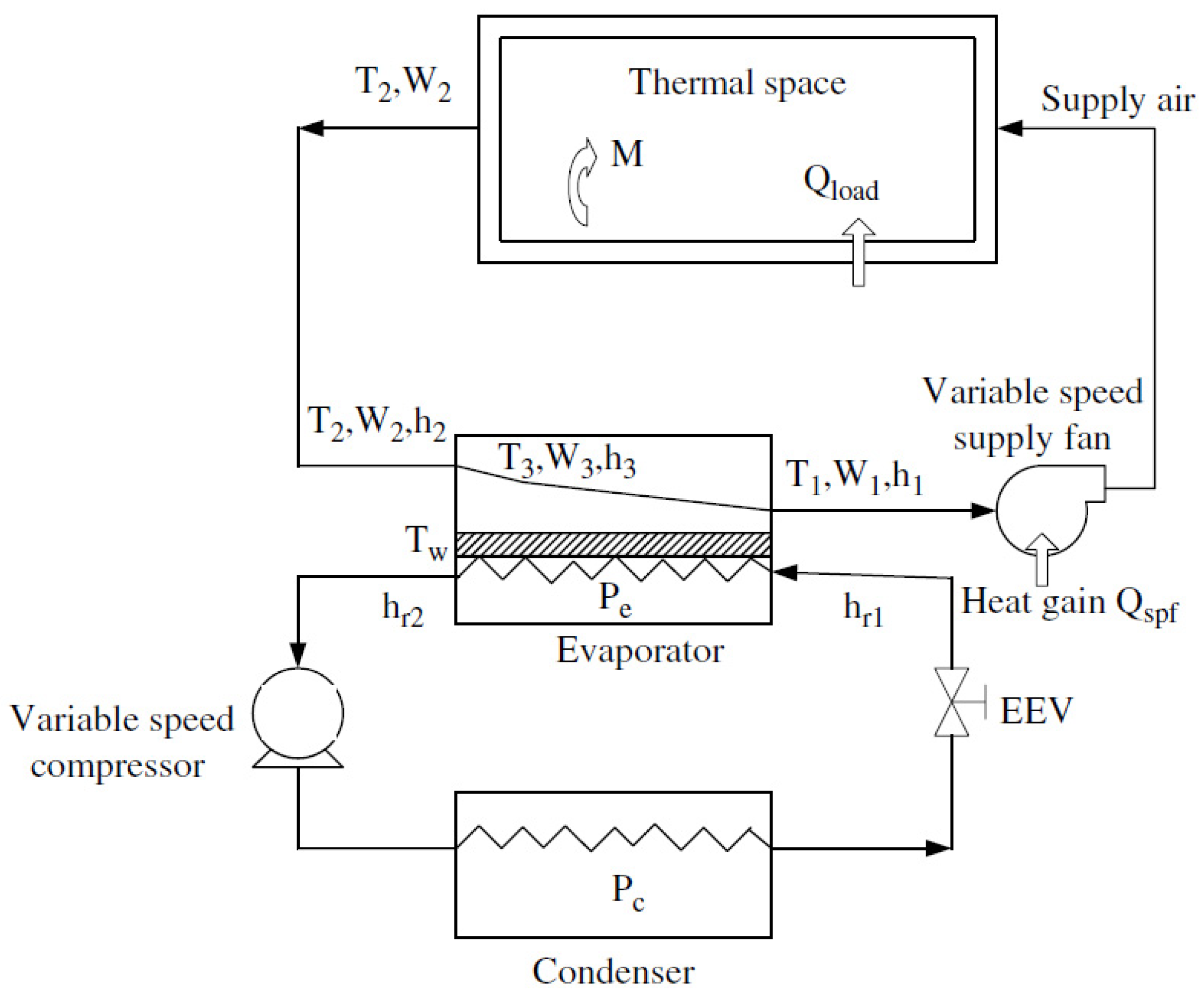
2.1. The Experimental VS DX A/C System and Its Dynamic Modeling
2.2. Discrete-Time High-Order Neural Network
2.2.1. Nonlinear System Neural Identification
2.2.2. The UKF Training Algorithm
2.3. Inverse Optimal Control Introduction
- i.
- It achieves (global) asymptotic stability of θk = 0 for system (18) along reference θδ,k;
- ii.
- is (radially unbounded) positive definite function such that inequality
3. Results and Discussion
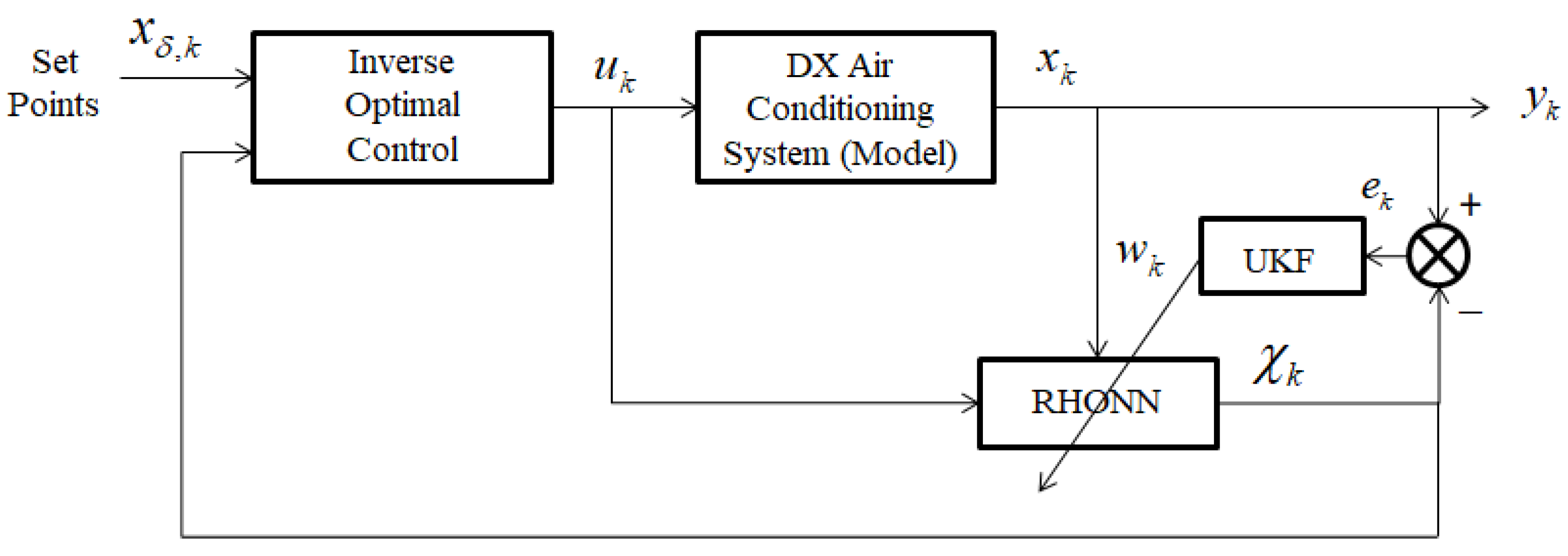
3.1. Identification and Control Scheme Application
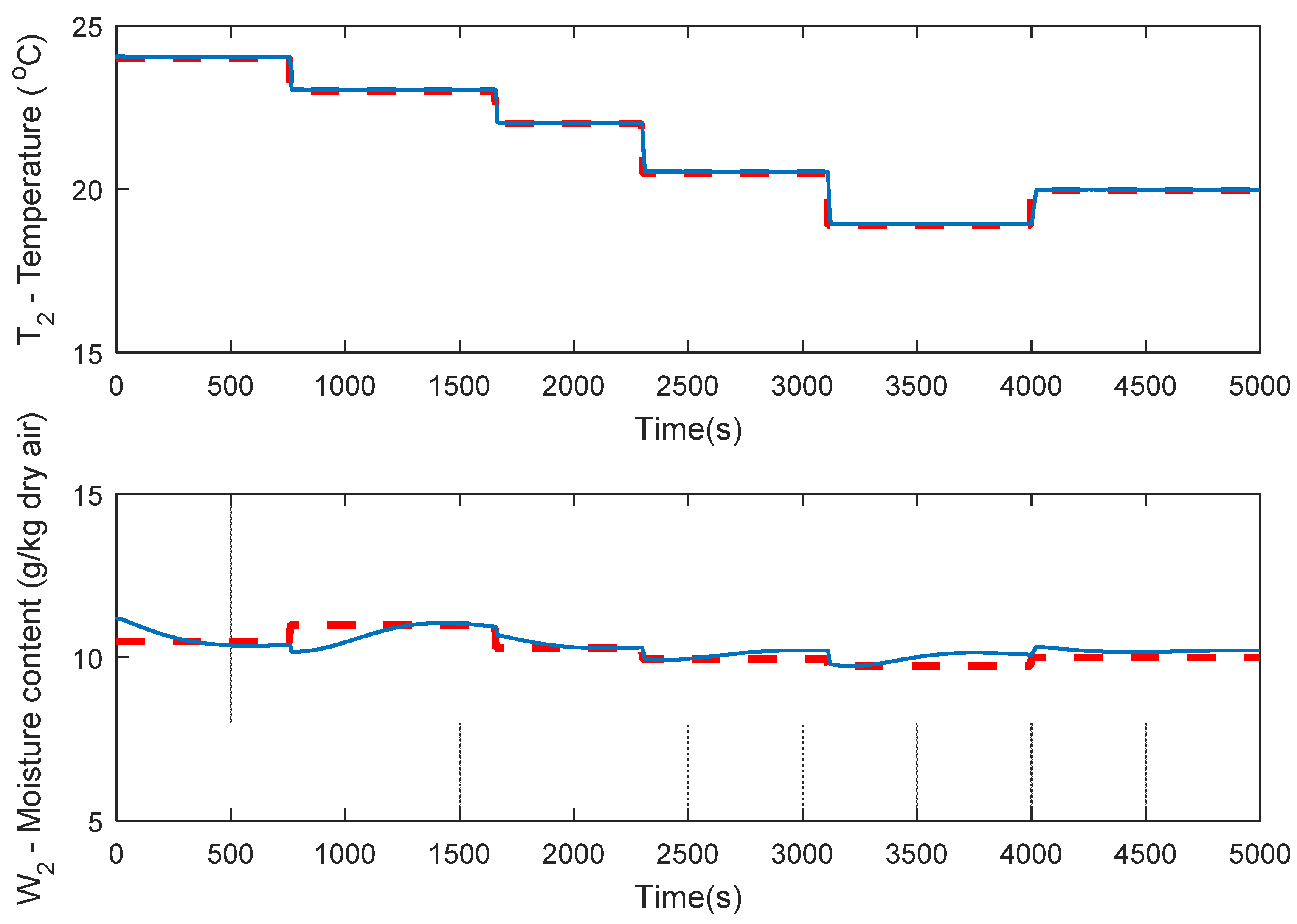
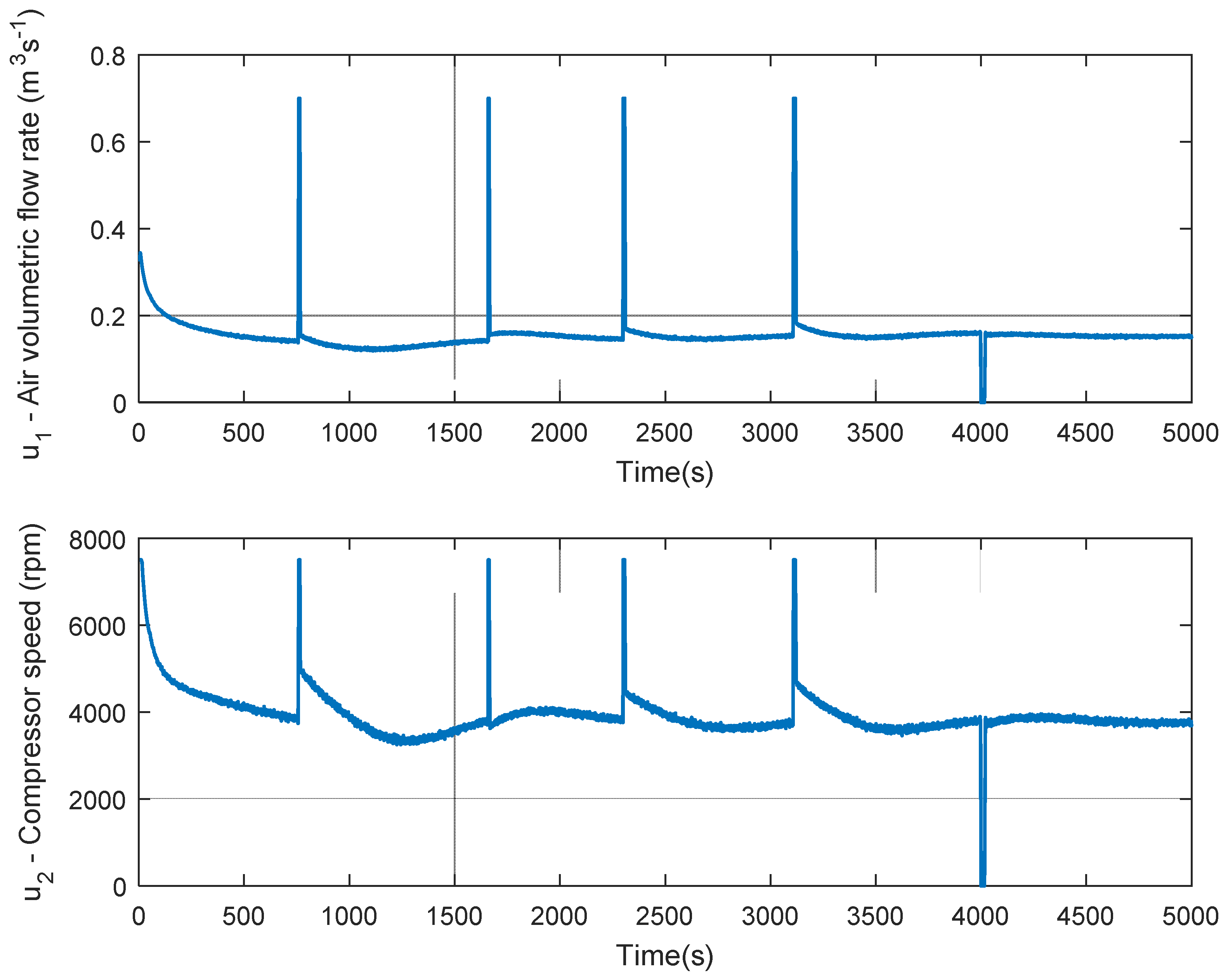
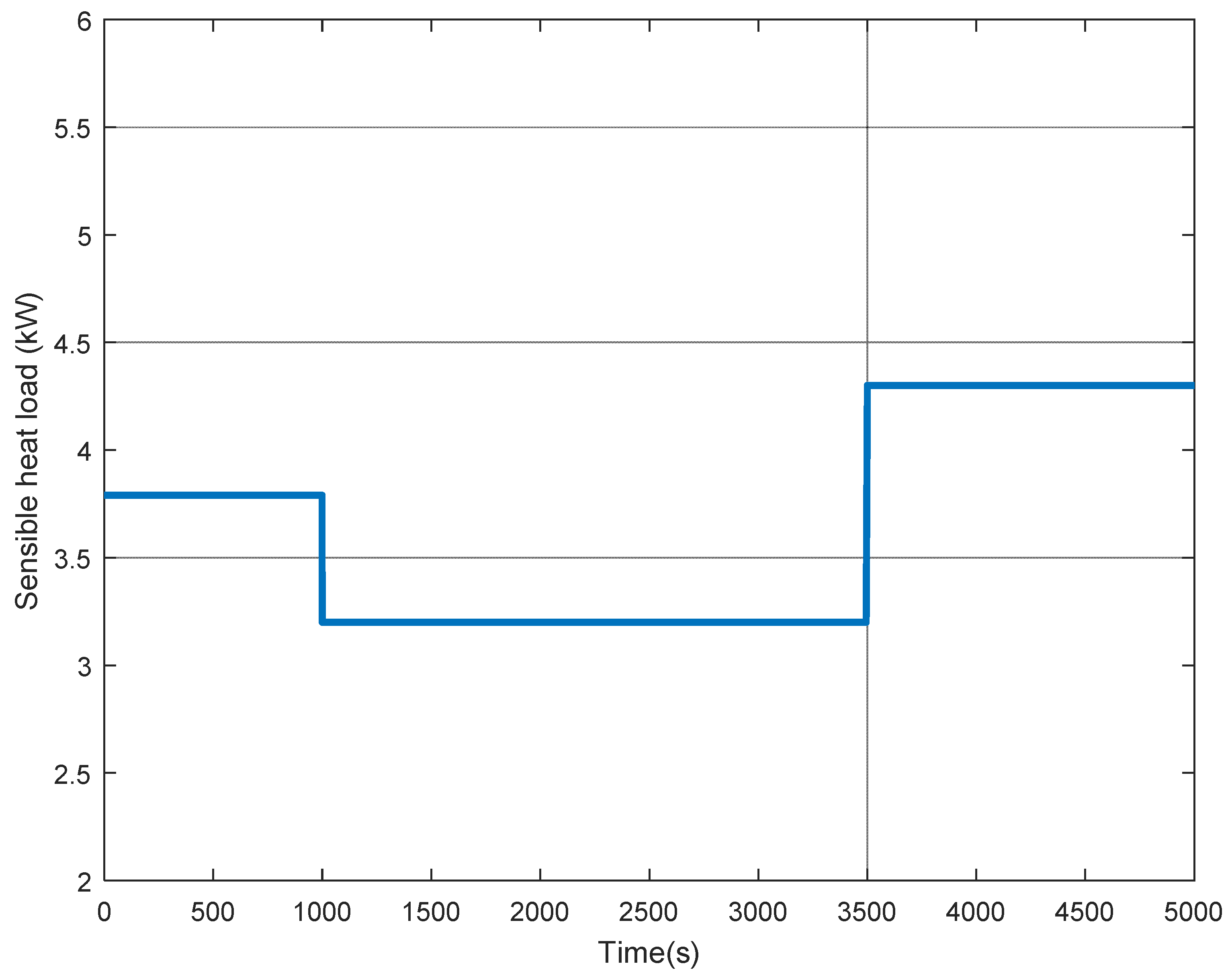
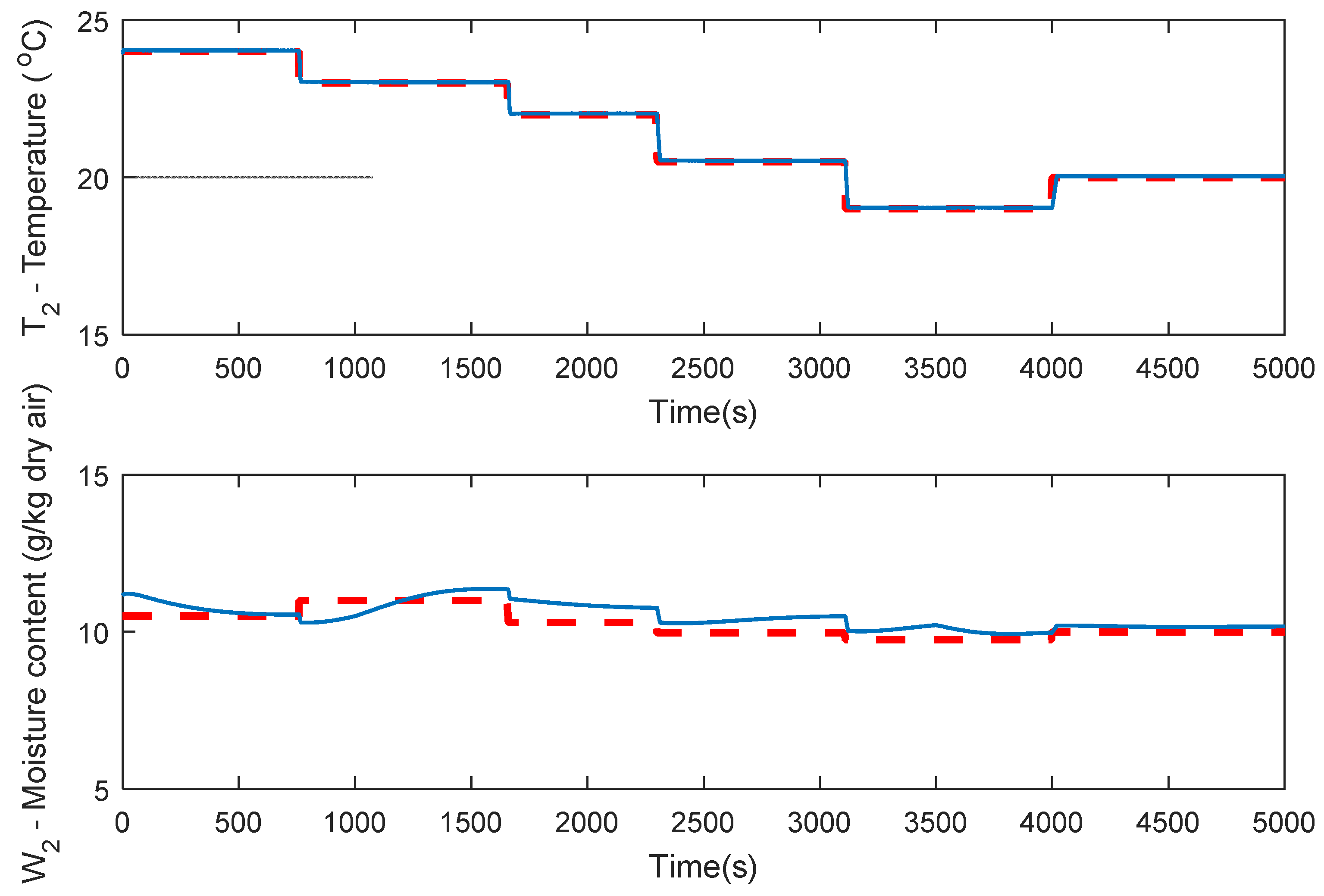
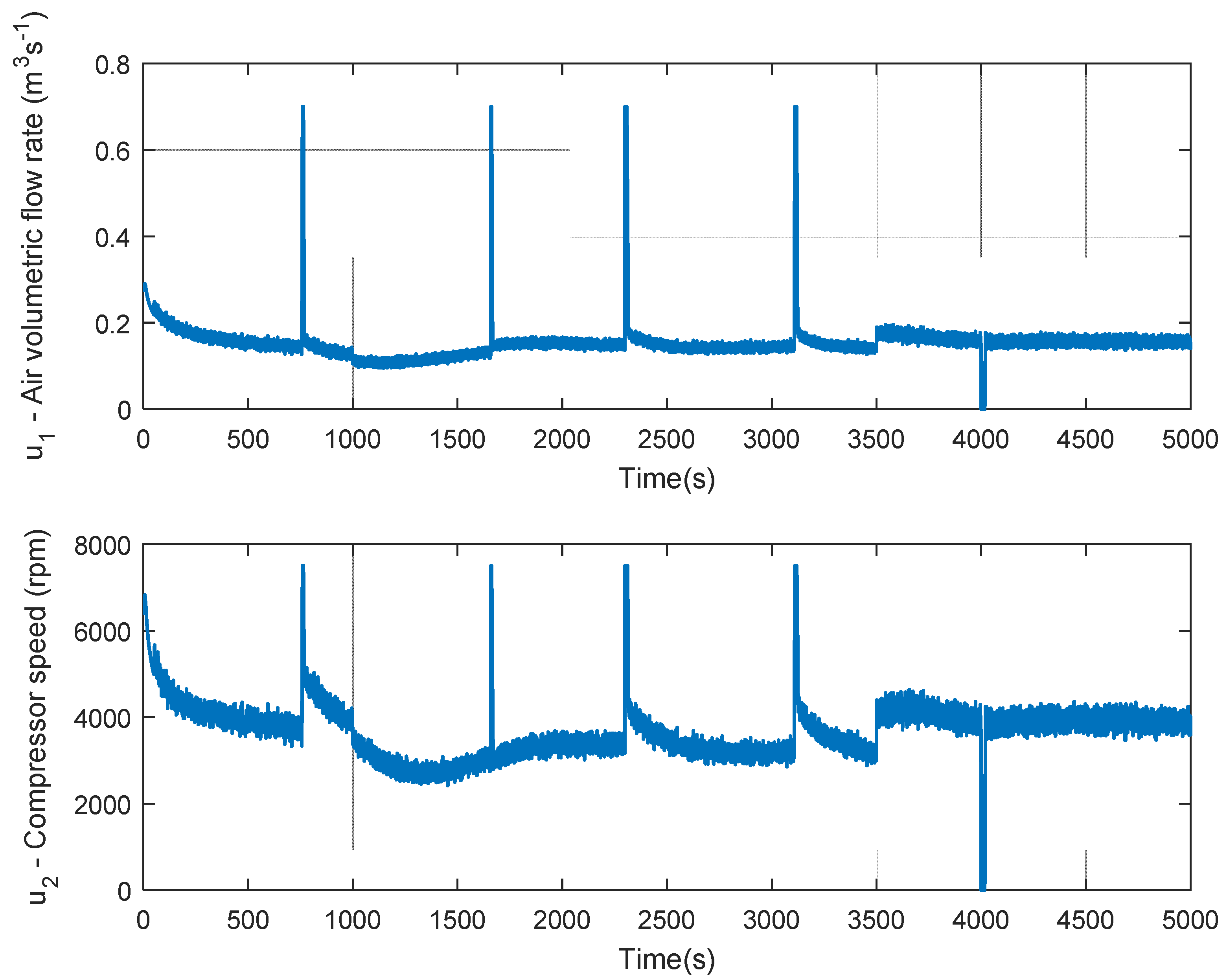
3.2. Controllability Simulation Test
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| a,b,c | Adaptation constants (dimensionless) |
| A1 | Heat transfer area of the DX evaporator in dry-cooling region (m2) |
| A2 | Heat transfer area of the DX evaporator in wet-cooling region (m2) |
| Cp | Specific heat of air (kJ kg−1 K−1) |
| f | Air volumetric flow rate (m3 s−1) |
| hfg | Latent heat of vaporization of water (kJ/kg) |
| M | Moisture load in the conditioned space (kg s−1) |
| Mref | Mass flow rate of refrigerant (kg s−1) |
| Qload | Sensible heat load in the conditioned space (kW) |
| Qspf | Heat gain of supply fan (kW) |
| s | Compressor speed (rpm) |
| T1 | Temperature of air leaving the DX evaporator (°C) |
| T2 | Air temperature in the conditioned space (°C) |
| T3 | Air temperature leaving the dry-cooling region of the DX evaporator (°C) |
| Tw | Temperature of the DX evaporator wall (°C) |
| V | Volume of the conditioned space (m3) |
| Vh1 | Air side volume of the DX evaporator in dry-coolingregion on air side (m3) |
| Vh2 | Air side volume of the DX evaporator in wet-coolingregion on air side (m3) |
| W1 | Moisture content of air leaving the DX evaporator (kg kg−1 dry air) |
| W2 | Moisture content of air-conditioned space (kg kg−1 dry air) |
| α1 | Heat transfer coefficient between air and the DXevaporator wall in dry-cooling region (kWm−2 °C−1) |
| α2 | Heat transfer coefficient between air and the DXevaporator wall in wet-cooling region (kWm−2 °C−1) |
| ρ | Density of moist air (kg m−3) |
Abbreviations
| A/C | Air Conditioning |
| ANN | Artificial Neural Network |
| CLF | Control Lyapunov Function |
| DX | Direct eXpansion |
| EEV | Electronic Expansion Valve |
| EKF | Extended Kalman Filter |
| GRV | Gaussian Random Variables |
| HJB | Hamilton Jacobi Bellman |
| IAQ | Indoor Air Quality |
| MIMO | Multi-Input Multi-Output |
| PID | Proportional Integral Derivative |
| RH | Relative Humidity |
| RHONN | Recurrent High-Order Neural Network |
| UKF | Unscented Kalman Filter |
| UT | Unscented Transformation |
| VSD | Variable-Speed Drive |
References
- Chen, W.; Chan, M.; Deng, S.; Yan, H.; Weng, W. A direct expansion based enhanced dehumidification air conditioning system for improved year-round indoor humidity control in hot and humid climates. Build. Environ. 2018, 139, 95–109. [Google Scholar] [CrossRef]
- Chen, W.; Chan, M.; Weng, W.; Yan, H.; Deng, S. An experimental study on the operational characteristics of a direct expansion based enhanced dehumidification air conditioning system. Appl. Energy 2018, 225, 922–933. [Google Scholar] [CrossRef]
- Zhang, H.; Yoshino, H. Analysis of indoor humidity environment in Chinese residential buildings. Build. Environ. 2010, 45, 2132–2140. [Google Scholar] [CrossRef]
- Chen, W.; Chan, M.; Weng, W.; Yan, H.; Deng, S. Development of a steady-state physical-based mathematical model for a direct expansion based enhanced dehumidification air conditioning system. Int. J. Refrig. 2018, 91, 55–68. [Google Scholar] [CrossRef]
- Bordrick, J.; Gilbride, T.L. Focusing on Buyer’s Needs: DOE’s Engineering Technology Program. Energy Eng. 2002, 99, 18–37. [Google Scholar] [CrossRef]
- Zhang, G.Q. China HVACR annual volume II business. Chin. Constr. Ind. Press Beijing 2002, 2, 44–45. [Google Scholar]
- Kang, C.-S.; Hyun, C.-H.; Park, M. Fuzzy logic-based advanced on–off control for thermal comfort in residential buildings. Appl. Energy 2015, 155, 270–283. [Google Scholar] [CrossRef]
- Toftum, J.; Fanger, P.O. Air humidity requirements for human comfort. ASHRAE Trans. 1999, 105, 641–647. [Google Scholar]
- Krakow, K.I.; Lin, S.; Zeng, Z.-S. Temperature and humidity control during cooling and dehumidifying by compressor and evaporator fan speed variation. ASHRAE Trans. 1995, 101, 292–304. [Google Scholar]
- Diaz-Mendez, S.E.; Patiño-Carachure, C.; Herrera-Castillo, J.A. Reducing the energy consumption of an earth–air heat exchanger with a PID control system. Energy Convers. Manag. 2014, 77, 1–6. [Google Scholar] [CrossRef]
- Li, Z.; Deng, S. A DDC-based capacity controller of a direct expansion (DX) air conditioning (A/C) unit for simultaneous indoor air temperature and humidity control–Part I: Control algorithms and preliminary controllability tests. Int. J. Refrig. 2007, 30, 113–123. [Google Scholar] [CrossRef]
- Qi, Q.; Deng, S. Multivariable control of indoor air temperature and humidity in a direct expansion (DX) air conditioning (A/C) system. Build. Environ. 2009, 44, 1659–1667. [Google Scholar] [CrossRef]
- Li, N.; Xia, L.; Shiming, D.; Xu, X.; Chan, M.Y. Dynamic modeling and control of a direct expansion air conditioning system using artificial neural network. Appl. Energy 2012, 91, 290–300. [Google Scholar] [CrossRef]
- Li, Z.; Xu, X.; Deng, S.; Pan, D. A novel neural network aided fuzzy logic controller for a variable speed (VS) direct expansion (DX) air conditioning (A/C) system. Appl. Therm. Eng. 2015, 78, 9–23. [Google Scholar] [CrossRef]
- Xia, Y.; Yan, H.; Deng, S.; Chan, M.-Y. A new capacity controller for a direct expansion air conditioning system for operational safety and efficiency. Build. Serv. Eng. Res. Technol. 2018, 39, 21–37. [Google Scholar] [CrossRef] [Green Version]
- Diaz, S.E.; Sierra, J.M.T.; Herrera, J.A. The use of earth–air heat exchanger and fuzzy logic control can reduce energy consumption and environmental concerns even more. Energy Build. 2013, 65, 458–463. [Google Scholar] [CrossRef]
- Garces-Jimenez, A.; Gomez-Pulido, J.-M.; Gallego-Salvador, N.; Garcia-Tejedor, A.-J. Genetic and Swarm Algorithms for Optimizing the Control of Building HVAC Systems Using Real Data: A Comparative Study. Mathematics 2021, 9, 2181. [Google Scholar] [CrossRef]
- Adegbenro, A.; Short, M.; Angione, C. An Integrated Approach to Adaptive Control and Supervisory Optimisation of HVAC Control Systems for Demand Response Applications. Energies 2021, 14, 2078. [Google Scholar] [CrossRef]
- Jajarmi, A.; Pariz, N.; Effati, S.; Kamyad, A.V. Infinite horizon optimal control for nonlinear interconnected large-scale dynamical systems with an application to optimal attitude control. Asian J. Control 2012, 14, 1239–1250. [Google Scholar] [CrossRef]
- Baleanu, D.; Zibaei, S.; Namjoo, M.; Jajarmi, A. A nonstandard finite difference scheme for the modeling and nonidentical synchronization of a novel fractional chaotic system. Adv. Differ. Equ. 2021, 2021, 308. [Google Scholar] [CrossRef]
- Jajarmi, A.; Baleanu, D.; Zarghami Vahid, K.; Mobayen, S. A general fractional formulation and tracking control for immunogenic tumor dynamics. Math. Methods Appl. Sci. 2022, 45, 667–680. [Google Scholar] [CrossRef]
- Willis, M.J.; Montague, G.A.; Di Massimo, C.; Tham, M.T.; Morris, A.J. Artificial neural networks in process estimation and control. Automatica 1992, 28, 1181–1187. [Google Scholar] [CrossRef]
- Trebatický, P. Recurrent neural network training with the extended kalman filter. In Proceedings of the Student Research Conf. in Informatics and Information Technologies, Bratislava, Slovakia, 27 April 2005; pp. 57–64. [Google Scholar]
- Feldkamp, L.A.; Prokhorov, D.V.; Feldkamp, T.M. Simple and conditioned adaptive behavior from Kalman filter trained recurrent networks. Neural Netw. 2003, 16, 683–689. [Google Scholar] [CrossRef]
- Alanis, A.Y.; Sanchez, E.N.; Loukianov, A.G.; Perez-Cisneros, M.A. Real-time discrete neural block control using sliding modes for electric induction motors. IEEE Trans. Control Syst. Technol. 2010, 18, 11–21. [Google Scholar] [CrossRef]
- Leung, C.-S.; Chan, L.-W. Dual extended Kalman filtering in recurrent neural networks. Neural Netw. 2003, 16, 223–239. [Google Scholar] [CrossRef]
- Haykin, S. Kalman filters. In Kalman Filtering and Neural Networks; Haykin, S., Ed.; John Wiley & Sons, Inc.: New York, NY, USA, 2001; pp. 1–21. ISBN 978-0-471-36998-1. [Google Scholar]
- Julier, S.J.; Uhlmann, J.K. New extension of the Kalman filter to nonlinear systems. In Proceedings of the Signal Processing, Sensor Fusion, and Target Recognition VI, Orlando, FL, USA, 28 July 1997; pp. 182–193. [Google Scholar]
- Trebatický, P.; Pospíchal, J. Neural Network Training with Extended Kalman Filter Using Graphics Processing Unit. In Artificial Neural Networks-ICANN 2008; Springer: Berlin/Heidelberg, Germany, 2008; pp. 198–207. [Google Scholar]
- Kirk, D.E. Optimal Control Theory: An Introduction, 2nd ed.; Dover Publication, Inc.: Mineola, NY, USA, 2004. [Google Scholar]
- Krstic, M.; Kanellakopoulos, I.; Kokotovic, P.V. Nonlinear and Adaptive Control Design; John Wiley and Sons: New York, NY, USA, 1995. [Google Scholar]
- Do, K.D.; Jiang, Z.P.; Pan, J. Simultaneous Tracking and Stabilization of Mobile Robots: An Adaptive Approach. IEEE Trans. Automat. Contr. 2004, 49, 1147–1152. [Google Scholar] [CrossRef]
- Hernandez-Mejia, G.; Alanis, A.Y.; Hernandez-Vargas, E.A. Neural inverse optimal control for discrete-time impulsive systems. Neurocomputing 2018, 314, 101–108. [Google Scholar] [CrossRef]
- Ruiz-Cruz, R.; Sanchez, E.N.; Loukianov, A.G.; Ruz-Hernandez, J.A. Real-Time Neural Inverse Optimal Control for a Wind Generator. IEEE Trans. Sustain. Energy 2019, 10, 1172–1183. [Google Scholar] [CrossRef]
- Quintero-Manríquez, E.; Sanchez, E.N.; Antonio-Toledo, M.E.; Muñoz, F. Neural control of an induction motor with regenerative braking as electric vehicle architecture. Eng. Appl. Artif. Intell. 2021, 104, 104275. [Google Scholar] [CrossRef]
- Qi, Q.; Deng, S. Multivariable control-oriented modeling of a direct expansion (DX) air conditioning (A/C) system. Int. J. Refrig. 2008, 31, 841–849. [Google Scholar] [CrossRef]
- Narendra, K.S.; Parthasarathy, K. Identification and control of dynamical systems using neural networks. IEEE Trans. Neural Netw. 1990, 1, 4–27. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rovithakis, G.A.; Christodoulou, M.A. Adaptive Control with Recurrent High-Order Neural Networks; Advances in Industrial Control; Springer: Berlin, Germany, 2000; ISBN 978-1-4471-1201-3. [Google Scholar]
- Haddad, W.M.; Chellaboina, V.-S.; Fausz, J.L.; Abdallah, C. Optimal discrete-time control for non-linear cascade systems. J. Frankl. Inst. 1998, 335, 827–839. [Google Scholar] [CrossRef] [Green Version]
- Prokhorov, D.V. Kalman Filter Training of Neural Networks: Methodology and Applications. In Proceedings of the International Joint Conference on Neural Networks, IJCNN2004 Tutorials, Budapest, Hungary, 25–29 July 2004. [Google Scholar]
- Rhudy, M.; Gu, Y.; Napolitano, M.R. An Analytical Approach for Comparing Linearization Methods in EKF and UKF. Int. J. Adv. Robot. Syst. 2013, 10, 208. [Google Scholar] [CrossRef] [Green Version]
- Wan, E.A.; van der Merwe, R. The Unscented Kalman Filter. In Kalman Filtering and Neural Networks; Haykin, S., Ed.; John Wiley & Sons, Inc.: New York, NY, USA, 2001; pp. 221–280. ISBN 978-0-471-36998-1. [Google Scholar]
- Rhudy, M.; Gu, Y.; Gross, J.; Napolitano, M.R. Evaluation of Matrix Square Root Operations for UKF within a UAV GPS/INS Sensor Fusion Application. Int. J. Navig. Obs. 2011, 2011, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Van der Merwe, R.; Wan, E.A. The square-root unscented Kalman filter for state and parameter-estimation. In Proceedings of the International Conference on Acoustics, Speech, and Signal Processing, Salt Lake City, UT, USA, 7–11 May 2001; Volume 6, pp. 3461–3464. [Google Scholar]
- Başar, T.; Olsder, G.J. Dynamic Noncooperative Game Theory, 2nd ed.; Academic Press: New York, NY, USA, 1995; ISBN 978-0-89871-429-6. [Google Scholar]
- Lewis, F.L.; Syrmos, V.L. Optimal Control, 2nd ed.; John Wiley & Sons: New York, NY, USA, 1995. [Google Scholar]
- Al-Tamimi, A.; Lewis, F.L.; Abu-Khalaf, M. Discrete-Time Nonlinear HJB Solution Using Approximate Dynamic Programming: Convergence Proof. IEEE Trans. Syst. Man Cybern. Part B 2008, 38, 943–949. [Google Scholar] [CrossRef] [PubMed]
- Ohsawa, T.; Bloch, A.M.; Leok, M. Discrete Hamilton-Jacobi theory and discrete optimal control. In Proceedings of the 49th IEEE Conference on Decision and Control (CDC), Atlanta, GA, USA, 15–17 December 2010; pp. 5438–5443. [Google Scholar]







Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Muñoz, F.; Garcia-Hernandez, R.; Ruelas, J.; Palomares-Ruiz, J.E.; Álvarez-Macías, C. Optimal Operation for Reduced Energy Consumption of an Air Conditioning System Using Neural Inverse Optimal Control. Mathematics 2022, 10, 695. https://doi.org/10.3390/math10050695
Muñoz F, Garcia-Hernandez R, Ruelas J, Palomares-Ruiz JE, Álvarez-Macías C. Optimal Operation for Reduced Energy Consumption of an Air Conditioning System Using Neural Inverse Optimal Control. Mathematics. 2022; 10(5):695. https://doi.org/10.3390/math10050695
Chicago/Turabian StyleMuñoz, Flavio, Ramon Garcia-Hernandez, Jose Ruelas, Juan E. Palomares-Ruiz, and Carlos Álvarez-Macías. 2022. "Optimal Operation for Reduced Energy Consumption of an Air Conditioning System Using Neural Inverse Optimal Control" Mathematics 10, no. 5: 695. https://doi.org/10.3390/math10050695