
Analytical Solutions of Viscoelastic Nonlocal Timoshenko Beams

 ,
,  , and
, and 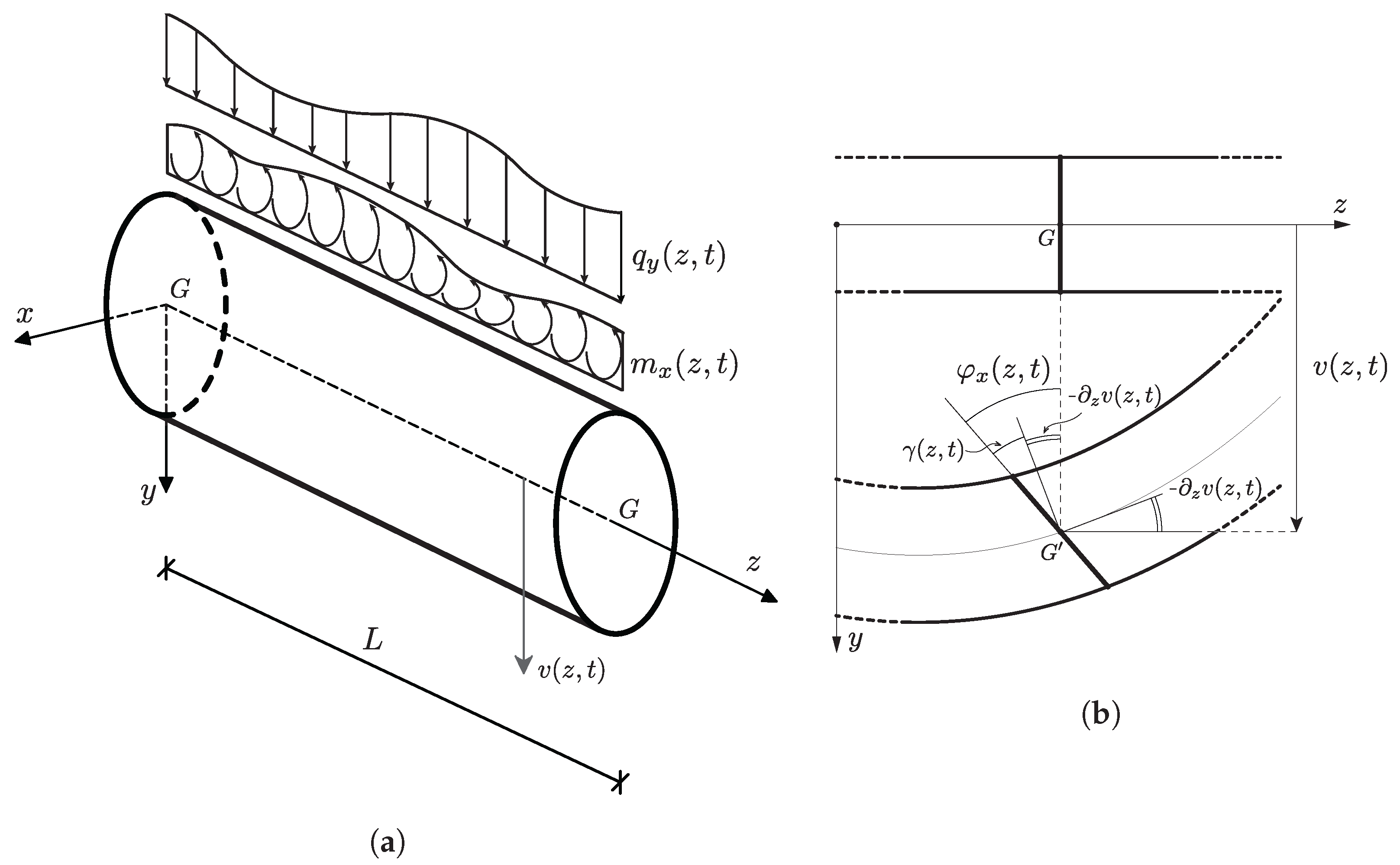{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Fractional Viscoelasticity for Beam Problems
2.1. Stress and Strain in Bending Problems
2.2. Fractional-Order Viscoelasticity
3. Nonlocal Viscoelastic Timoshenko Beam
3.1. Fractional Viscoelastic Beam Model
3.2. Viscoelastic Stress-Driven Nonlocal Beam
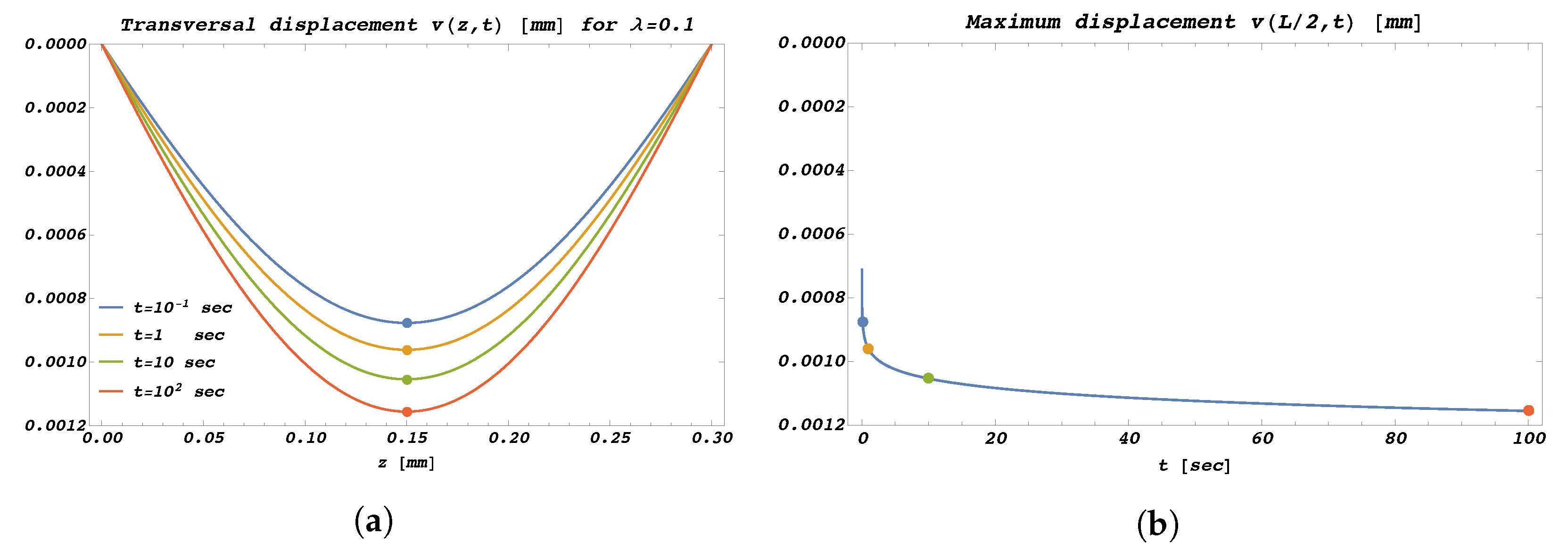
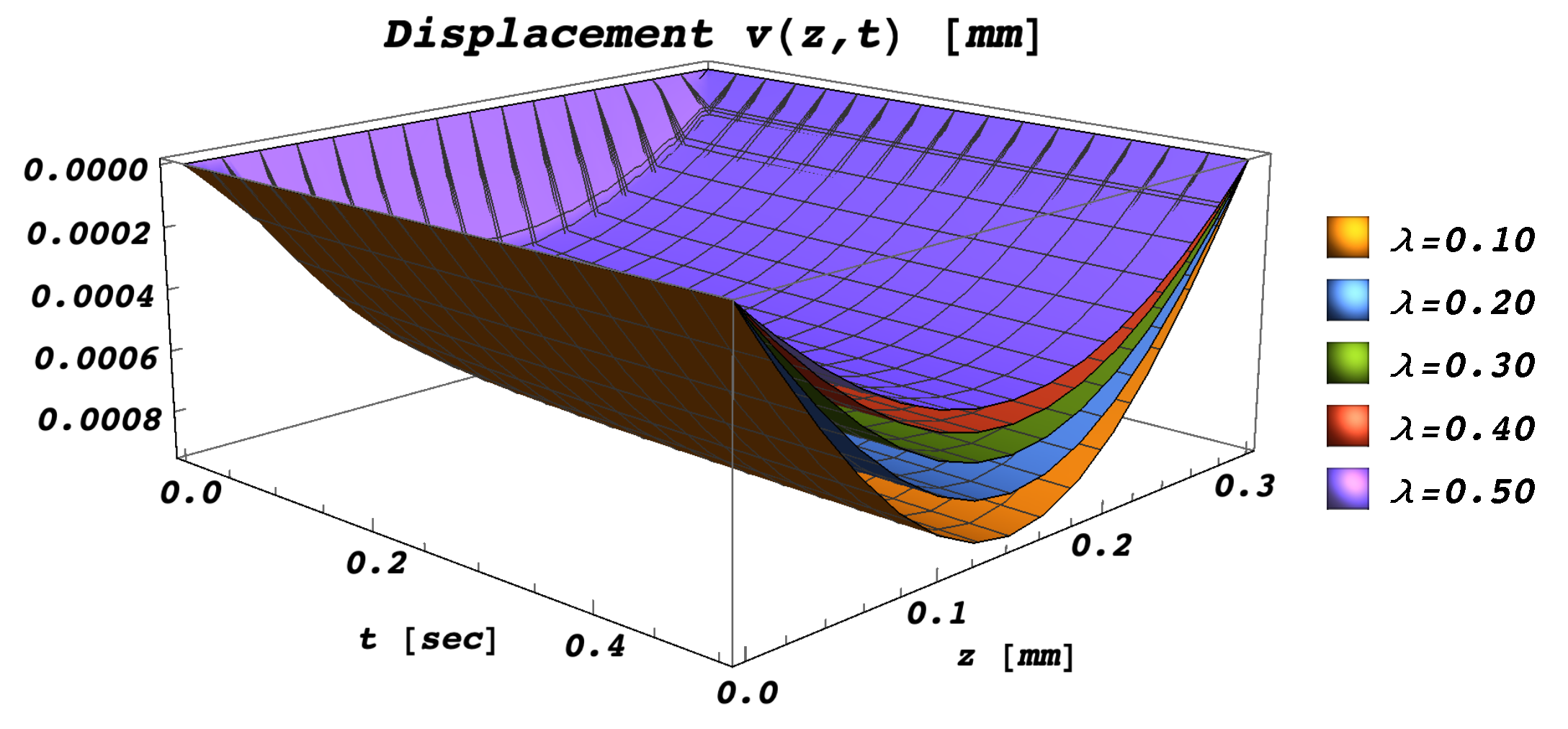
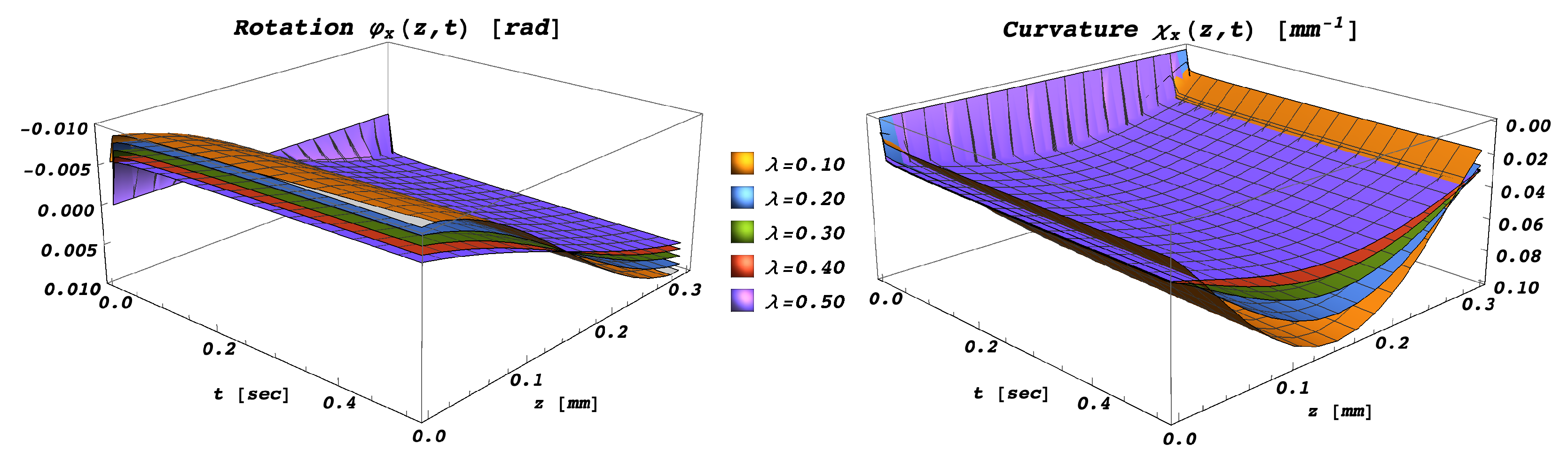
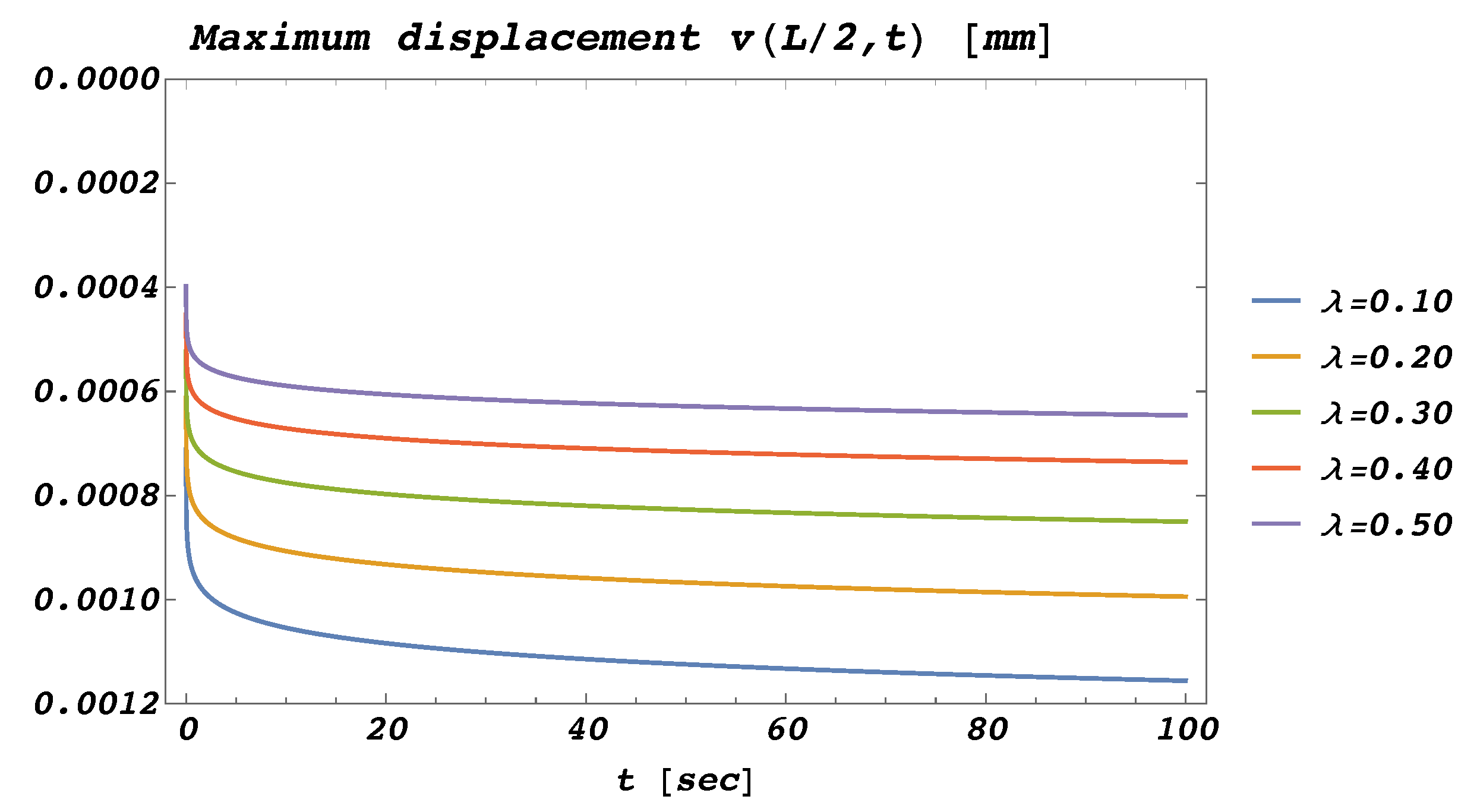
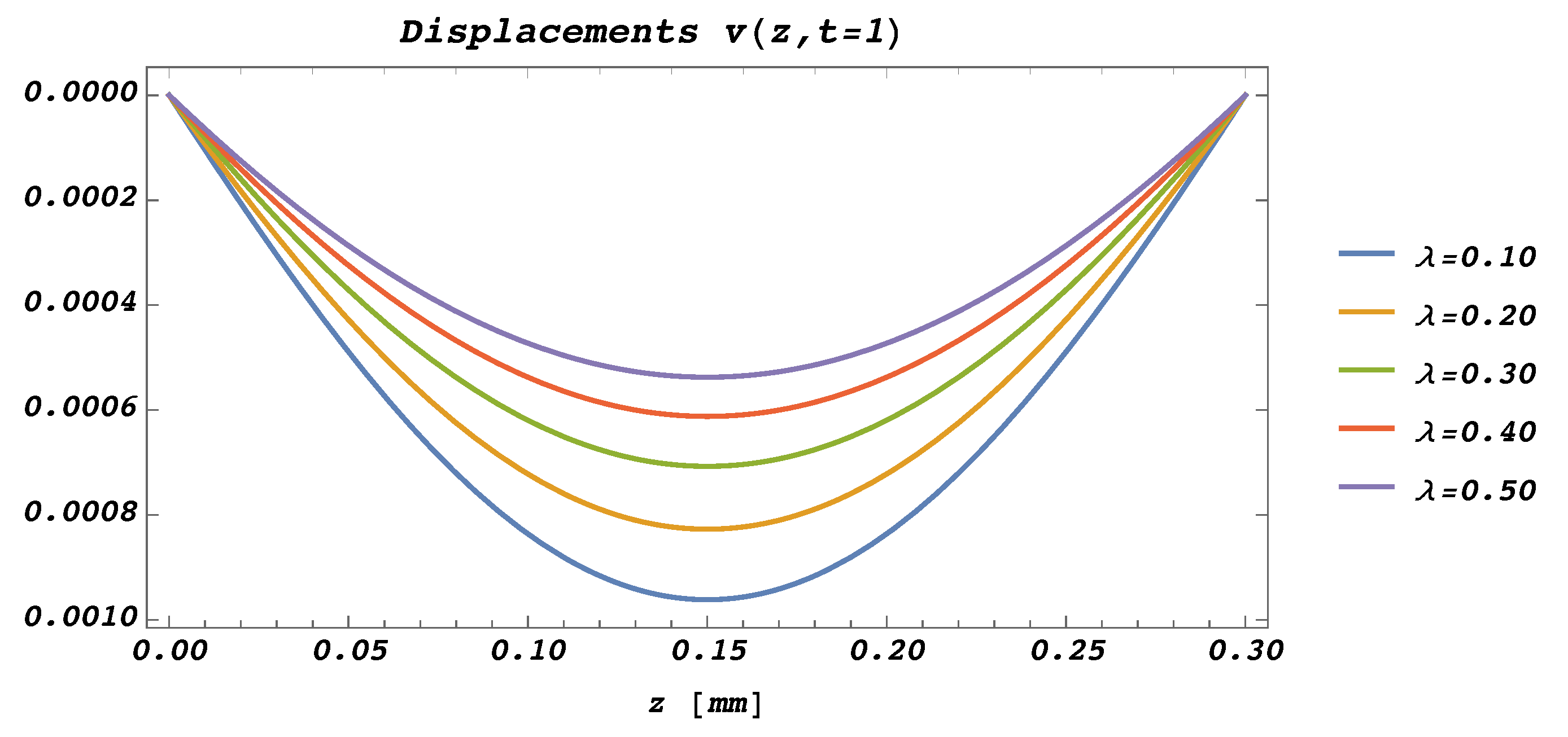
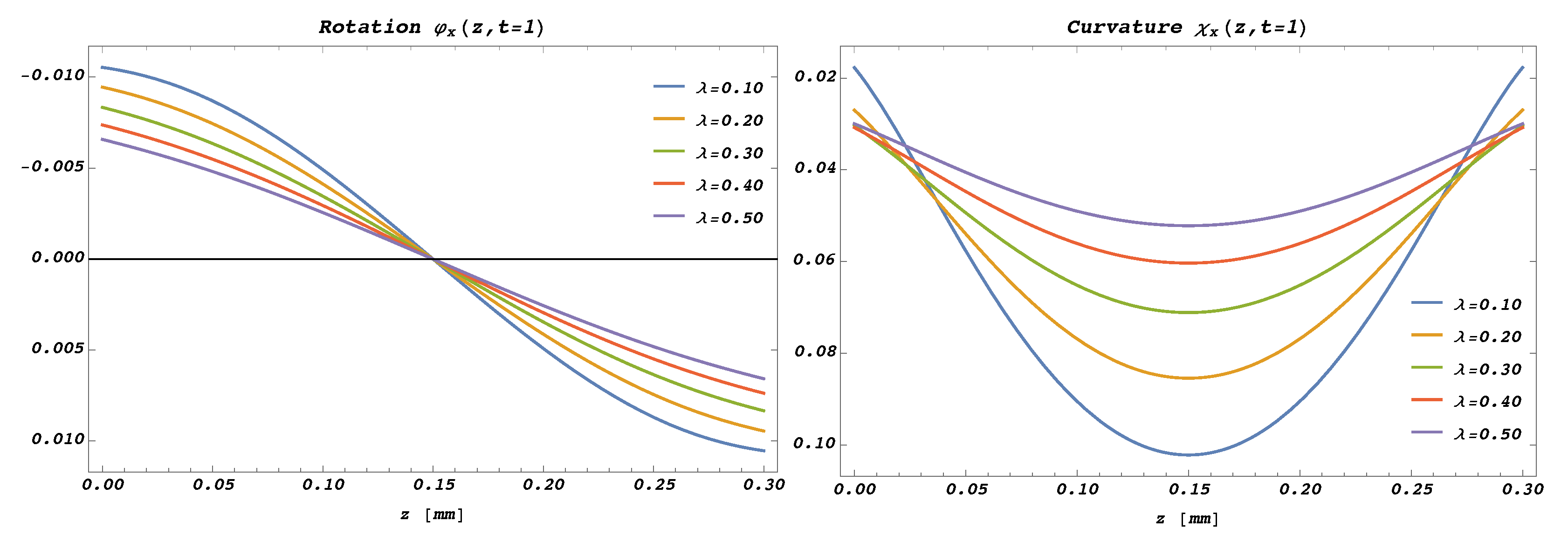
4. Sample Applications: Simply Supported Viscoelastic Micro-Beam
Influence of the Nonlocal Parameter
5. Concluding Remarks
- The Boltzmann superposition integral produces a time-dependent nonlocality, where states of the past influence the mechanical response in the present and the future. For this reason, it is used to call this characteristic memory and hereditary materials those elements that exhibit this behaviour.
- Stress-driven integral theory yields a space-dependent nonlocality, in this case there is a long-range influence between points of the continuum in different positions, and the strain at any point of the medium depends nonlocally on the stress field.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| MEMS | micro electromechanical system |
| NEMS | nano electromechanical system |
References
- Mojahedi, M. Size dependent dynamic behaviour of electrostatically actuated microbridges. Int. J. Eng. Sci. 2017, 111, 74–85. [Google Scholar] [CrossRef]
- De Bellis, M.L.; Bacigalupo, A.; Zavarise, G. Characterization of hybrid piezoelectric nanogenerators through asymptotic homogenization. Comput. Methods Appl. Mech. Eng. 2019, 355, 1148–1186. [Google Scholar] [CrossRef] [Green Version]
- Kiani, K.; Zur, K.K. Vibrations of double-nanorod-systems with defects using nonlocal-integral-surface energy-based formulations. Compos. Struct. 2021, 256, 113028. [Google Scholar] [CrossRef]
- Malikan, M.; Uglov, N.S.; Eremeyev, V.A. On instabilities and post-buckling of piezomagnetic and flexomagnetic nanostructures. Int. J. Eng. Sci. 2020, 157, 103395. [Google Scholar] [CrossRef]
- Luciano, R.; Willis, J.R. Boundary-layer corrections for stress and strain fields in randomly heterogeneous materials. J. Mech. Phys. Solids 2003, 51, 1075–1088. [Google Scholar] [CrossRef]
- Rahmani, O.; Pedram, O. Analysis and modeling the size effect on vibration of functionally graded nanobeams based on nonlocal Timoshenko beam theory. Int. J. Eng. Sci. 2014, 77, 55–70. [Google Scholar] [CrossRef]
- Fuschi, P.; Pisano, A.A.; Polizzotto, C. Size effects of small-scale beams in bending addressed with a strain-difference based nonlocal elasticity theory. Int. J. Mech. Sci. 2019, 151, 661–671. [Google Scholar] [CrossRef]
- Jankowski, P.; Zur, K.K.; Kim, J.; Reddy, J.N. On the bifurcation buckling and vibration of porous nanobeams. Compos. Struct. 2020, 250, 112632. [Google Scholar] [CrossRef]
- Malikan, M.; Eremeyev, V.A.; Zur, K.K. Effect of axial porosities on flexomagnetic response of in-plane compressed piezomagnetic nanobeams. Symmetry 2020, 12, 1935. [Google Scholar] [CrossRef]
- Vaccaro, M.S.; Pinnola, F.P.; de Sciarra, F.M.; Canadija, M.; Barretta, R. Stress-driven two-phase integral elasticity for Timoshenko curved beams. Proc. Inst. Mech. Eng. Part J. Nanomater. Nanoeng. Nanosyst. 2021, 235, 52–63. [Google Scholar] [CrossRef]
- Di Matteo, A.; Pavone, M.; Pirrotta, A. Exact and Approximate Analytical Solutions for Nonlocal Nanoplates of Arbitrary Shapes in Bending Using the Line Element-Less Method. Meccanica 2021, 1–19. [Google Scholar] [CrossRef]
- Rogula, D. Influence of spatial acoustic dispersion on dynamical properties of dislocations. Bull. Acad. Pol. Sci. Ser. Sci. Tech. 1965, 13, 337–343. [Google Scholar]
- Rogula, D. Introduction to nonlocal theory of material media. In Nonlocal Theory of Material Media; CISM Courses and Lectures; Rogula, D., Ed.; Springer: Wien, Austria, 1982; Volume 268, pp. 125–222. [Google Scholar]
- Flugge, W. Viscoelasticity; Blaisdell Publishing Company: Waltham, MA, USA, 1967. [Google Scholar]
- Christensen, R.M. Theory of Viscoelasticity, an Introduction; Academic Press: New York, NY, USA, 1982. [Google Scholar]
- Tricomi, F.G. Integral Equations; Interscience: New York, NY, USA, 1957. [Google Scholar]
- Mainardi, F. Fractional Calculus and Waves in Linear Viscoelasticity; Imperial College: London, UK, 2010. [Google Scholar]
- Luciano, R.; Willis, J.R. Non-local constitutive response of a random laminate subjected to configuration-dependent body force. J. Mech. Phys. Solids 2001, 49, 431–444. [Google Scholar] [CrossRef]
- Lam, D.C.C.; Yang, F.; Chong, A.C.M.; Wang, J.; Tong, P. Experiments and theory in strain gradient elasticity. J. Mech. Phys. Solids 2003, 51, 1477–1508. [Google Scholar] [CrossRef]
- Romano, G.; Diaco, M. On formulation of nonlocal elasticity problems. Meccanica 2020, 56, 1303–1328. [Google Scholar] [CrossRef]
- Lim, C.W.; Zhang, G.; Reddy, J.N. A higher-order nonlocal elasticity and strain gradient theory and its applications in wave propagation. J. Mech. Phys. Solids 2015, 78, 298–313. [Google Scholar] [CrossRef]
- Barretta, R.; de Sciarra, F.M. Constitutive boundary conditions for nonlocal strain gradient elastic nano-beams. Int. J. Eng. Sci. 2018, 130, 187–198. [Google Scholar] [CrossRef]
- Di Paola, M.; Pirrotta, A.; Zingales, M. Mechanically-based approach to non-local elasticity: Variational principles. Int. J. Solids Struct. 2010, 47, 539–548. [Google Scholar] [CrossRef] [Green Version]
- Di Paola, M.; Failla, G.; Zingales, M. Non-local stiffness and damping models for shear-deformable beams. Eur. J. Mech. A/Solids 2013, 40, 69–83. [Google Scholar] [CrossRef] [Green Version]
- Zur, K.K.; Arefi, M.; Kim, J.; Reddy, J.N. Free vibration and buckling analyses of magneto-electro-elastic FGM nanoplates based on nonlocal modified higher-order sinusoidal shear deformation theory. Compos. Part B Eng. 2020, 182, 107601. [Google Scholar] [CrossRef]
- Eringen, A.C. Linear theory of nonlocal elasticity and dispersion of plane waves. Int. J. Eng. Sci. 1972, 10, 425–435. [Google Scholar] [CrossRef]
- Eringen, A.C. On differential equations of nonlocal elasticity and solutions of screw dislocation and surface waves. J. Appl. Phys. 1983, 54, 4703. [Google Scholar] [CrossRef]
- Challamel, N.; Wang, C.M. The small length scale effect for a non-local cantilever beam: A paradox solved. Nanotechnology 2008, 19, 345703. [Google Scholar] [CrossRef]
- Fernández-Sáez, J.; Zaera, R.; Loya, J.A.; Reddy, J.N. Bending of Euler-Bernoulli beams using Eringen’s integral formulation: A paradox resolved. Int. J. Eng. Sci. 2016, 99, 107–116. [Google Scholar] [CrossRef] [Green Version]
- Romano, G.; Barretta, R.; Diaco, M.; de Sciarra, F.M. Constitutive boundary conditions and paradoxes in nonlocal elastic nano-beams. Int. J. Mech. Sci. 2017, 121, 151–156. [Google Scholar] [CrossRef]
- Romano, G.; Barretta, R. Nonlocal elasticity in nanobeams: The stress-driven integral model. Int. J. Eng. Sci. 2017, 115, 14–27. [Google Scholar] [CrossRef]
- Romano, G.; Barretta, R. Stress-driven versus strain-driven nonlocal integral model for elastic nano-beams. Compos. Part B Eng. 2017, 114, 184–188. [Google Scholar] [CrossRef]
- Barretta, R.; Fabbrocino, F.; Luciano, R.; de Sciarra, F.M.; Ruta, G. Buckling loads of nano-beams in stress-driven nonlocal elasticity. Mech. Adv. Mater. Struct. 2020, 27, 869–875. [Google Scholar] [CrossRef]
- Nutting, P.G. A new general law of deformation. J. Frankl. Inst. 1921, 191, 679–685. [Google Scholar] [CrossRef]
- Bagley, R.L.; Torvik, P.J. On the appearance of the fractional derivative in the behavior of real materials. J. Appl. Mech. 1984, 51, 294–298. [Google Scholar]
- Di Paola, M.; Pirrotta, A.; Valenza, A. Visco-elastic behaviour through fractional calculus: An easier method for best fitting experimental results. Mech. Mater. 2011, 43, 799–806. [Google Scholar] [CrossRef] [Green Version]
- Celauro, C.; Fecarotti, C.; Pirrotta, A.; Collop, A.C. Experimental validation of a fractional model for creep/recovery testing of asphalt mixtures. Constr. Build. Mater. 2012, 36, 458–466. [Google Scholar] [CrossRef]
- Demirci, N.; Tonuk, E. Non-integer viscoelastic constitutive law to model soft biological tissues to in-vivo indentation. Acta Bioeng. Biomech. 2014, 16, 13–21. [Google Scholar] [PubMed]
- Di Paola, M.; Fiore, V.; Pinnola, F.P.; Valenza, A. On the influence of the initial ramp for a correct definition of the parameters of the fractional viscoelastic material. Mech. Mater. 2014, 69, 63–70. [Google Scholar] [CrossRef]
- Alotta, G.; Di Paola, M.; Pirrotta, A. Fractional Tajimi-Kanai model for simulating earthquake ground motion. Bull. Earthq. Eng. 2014, 12, 2495–2506. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Differential Equation; Academic Press: San Diego, CA, USA, 1999. [Google Scholar]
- Hilfer, R. Application of Fractional Calculus in Physics; World Scientific: Singapore, 2000. [Google Scholar]
- Gemant, A. A method of analyzing experimental results obtained from elasto-viscous bodies. Physics 1936, 7, 311–317. [Google Scholar] [CrossRef]
- Scott Blair, G.W.; Caffyn, J.E. An application of the theory of quasi-properties to the treatment of anomalous strain? stress relations. Philos. Mag. 1949, 40, 80–94. [Google Scholar] [CrossRef]
- Slonimsky, G.L. On the law of deformation of highly elastic polymeric bodies. Dokl. Akad. Nauk SSSR 1961, 140, 343–346. (In Russian) [Google Scholar]
- Di Matteo, A.; Pirrotta, A. Generalized Differential Transform Method for Nonlinear Boundary Value Problem of Fractional Order. Commun. Nonlinear Sci. Numer. Simul. 2015, 29, 88–101. [Google Scholar] [CrossRef]
- Pirrotta, A.; Cutrona, S.; Di Lorenzo, S.; Di Matteo, A. Fractional visco-elastic Timoshenko beam deflection via single equation. Int. J. Numer. Methods Eng. 2015, 104, 869–886. [Google Scholar] [CrossRef]
- Goeders, K.M.; Colton, J.S.; Bottomley, L.A. Microcantilevers: Sensing chemical interactions via mechanical motion. Chem. Rev. 2008, 108, 522–542. [Google Scholar] [CrossRef]
- Luciano, R.; Willis, J.R. FE analysis of stress and strain fields in finite random composite bodies. J. Mech. Phys. Solids 2005, 53, 1505–1522. [Google Scholar] [CrossRef]
- Tang, G.; Liu, J.-Q.; Liu, H.-S.; Li, Y.-G.; Yang, C.-S.; He, D.-N.; Dzungdao, V.; Tanaka, K.; Sugiyama, S. Piezoelectric MEMS generator based on the bulk PZT/silicon wafer bonding technique. Phys. Status Solidi (A) Appl. Mater. Sci. 2011, 208, 2913–2919. [Google Scholar] [CrossRef]
- Acierno, S.; Barretta, R.; Luciano, R.; de Sciarra, F.M.; Russo, P. Experimental evaluations and modeling of the tensile behavior of polypropylene/single-walled carbon nanotubes fibers. Compos. Struct. 2017, 174, 12–18. [Google Scholar] [CrossRef]







Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pinnola, F.P.; Barretta, R.; Marotti de Sciarra, F.; Pirrotta, A. Analytical Solutions of Viscoelastic Nonlocal Timoshenko Beams. Mathematics 2022, 10, 477. https://doi.org/10.3390/math10030477
Pinnola FP, Barretta R, Marotti de Sciarra F, Pirrotta A. Analytical Solutions of Viscoelastic Nonlocal Timoshenko Beams. Mathematics. 2022; 10(3):477. https://doi.org/10.3390/math10030477
Chicago/Turabian StylePinnola, Francesco Paolo, Raffaele Barretta, Francesco Marotti de Sciarra, and Antonina Pirrotta. 2022. "Analytical Solutions of Viscoelastic Nonlocal Timoshenko Beams" Mathematics 10, no. 3: 477. https://doi.org/10.3390/math10030477