
Adaptive Dual Synchronization of Fractional-Order Chaotic System with Uncertain Parameters

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Definition of Calculus
3. Synchronization of Fractional-Order Systems
4. Numerical Simulation
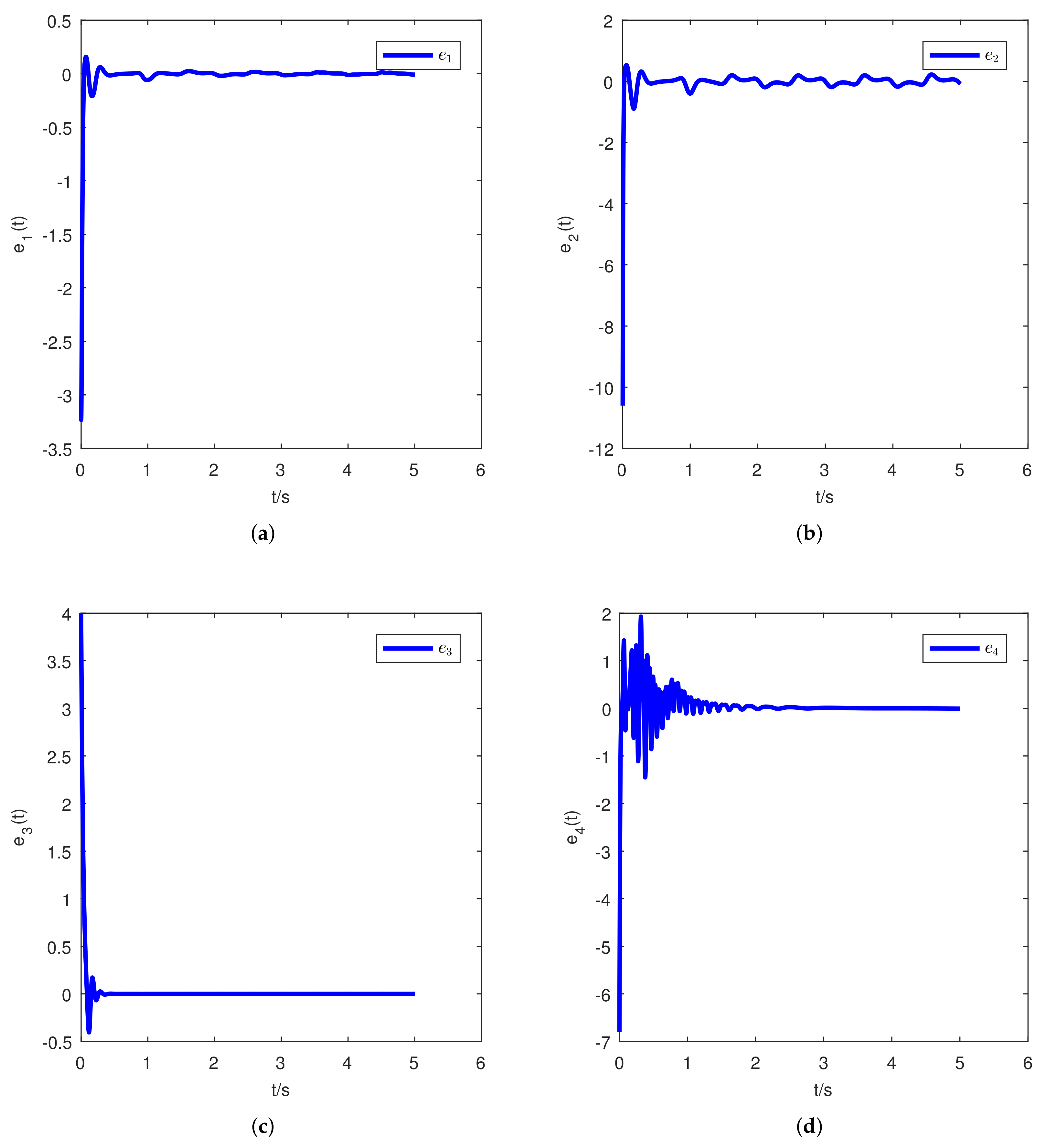
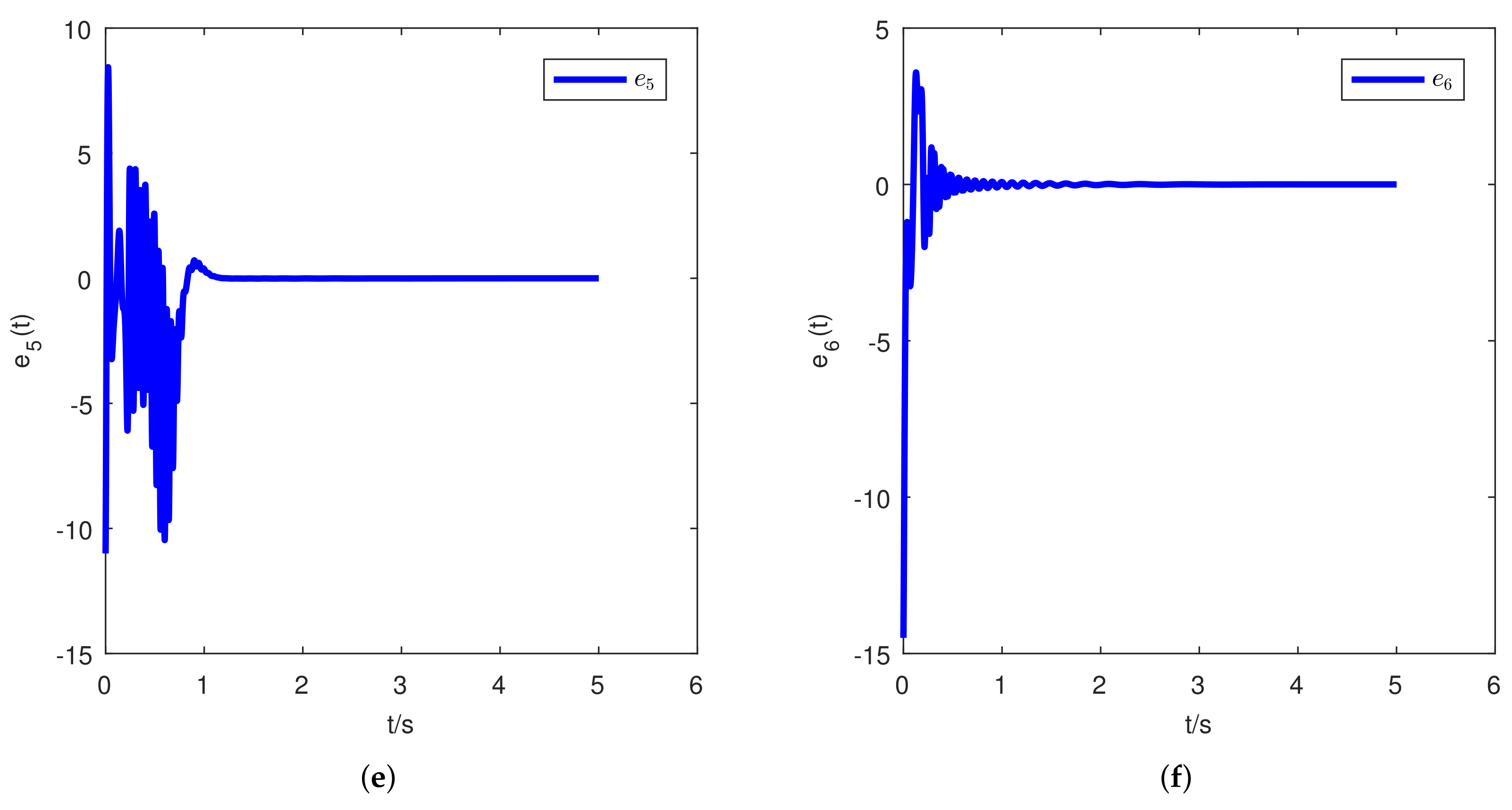
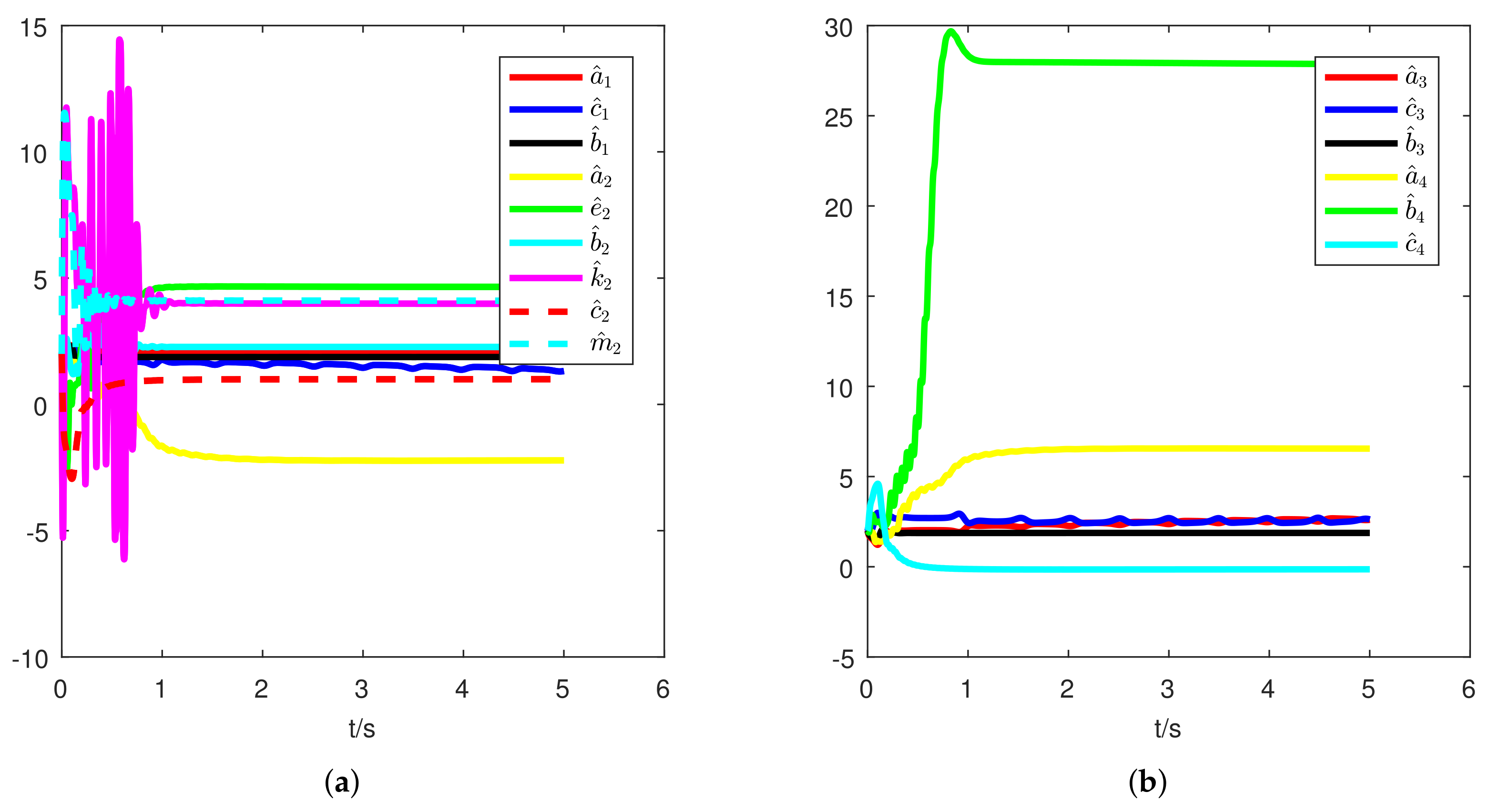
4.1. Adaptive Dual Synchronization of Chen, Lorenz, Liu and Lü Chaotic Systems
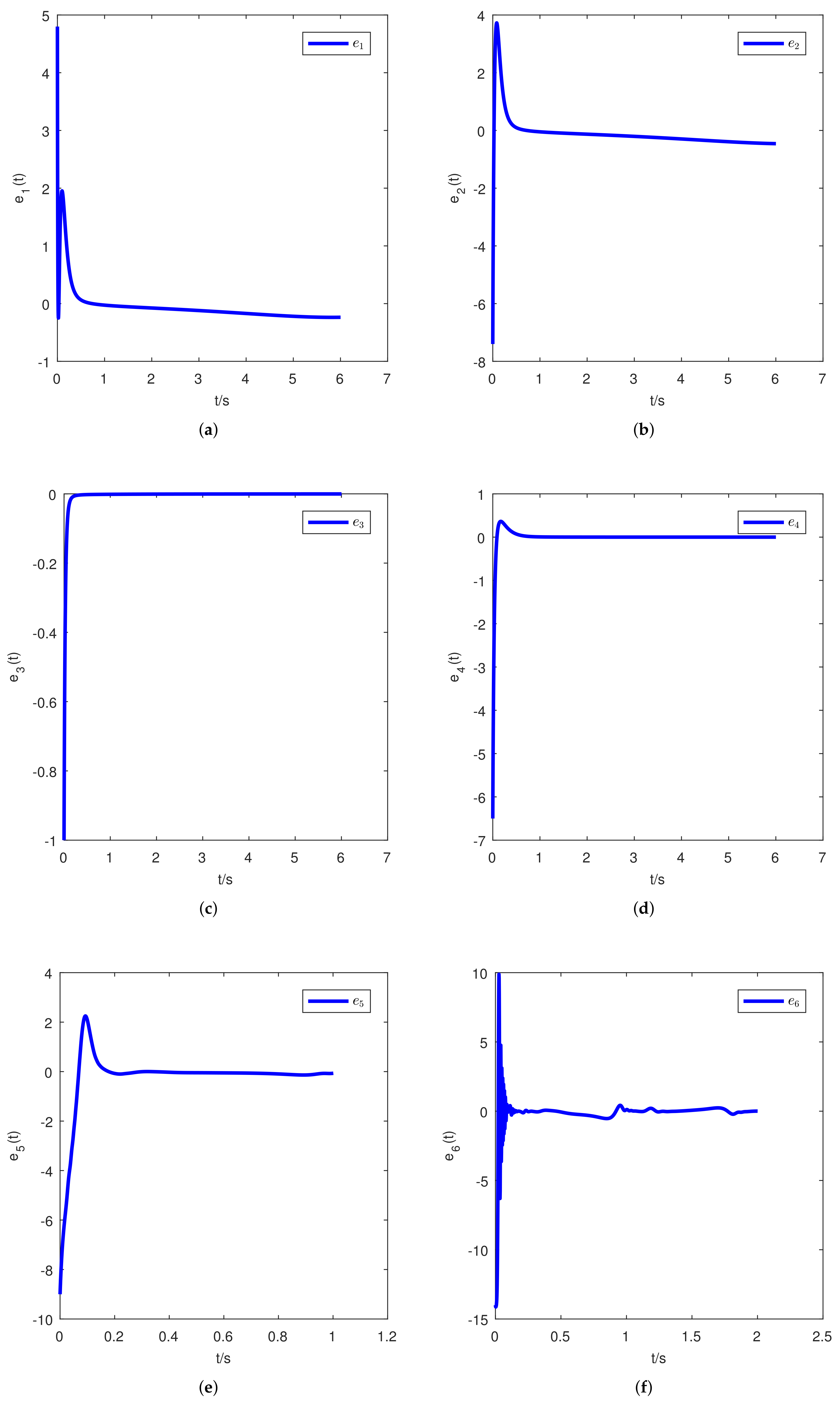
4.2. Adaptive Dual Synchronization of Chen, Lorenz, Lü and Liu Hyperchaotic Systems
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Butzer, P.L.; Westphal, U. An introduction to fractional calculus. Apidologie 2015, 33, 233–244. [Google Scholar]
- Miller, K.S.; Ross, B. An Introduction to the Fractional Calculus and Fractional Differential Equations; Wiley: Hoboken, NJ, USA, 1996; Volume 25, pp. 66–67. [Google Scholar]
- Li, C.L.; Yu, S.M.; Luo, X.S. Fractional-order permanent magnet synchronous motor and its adaptive chaotic control. Chin. Phys. B 2012, 21, 168–173. [Google Scholar] [CrossRef] [Green Version]
- Peterson, M.R.; Nayak, C. Effects of landau level mixing on the fractional quantum hall effect in monolayer graphene(Article). Phys. Rev. Lett. 2014, 113, 86401. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rivero, M.; Rogosin, S.V.; Trujillo, J.J. Stability of Fractional Order Systems. Math. Probl. Eng. 2013, 2013, 133–174. [Google Scholar] [CrossRef]
- Dana, S.K.; Roy, P.K.; Kurths, J. Complex Dynamics in Physiological Systems: From Heart to Brain; Springer: Dordrecht, The Netherlands, 2009. [Google Scholar]
- Hilfer, R. Applications of Fractional Calculus in Physics; World Scientific: Singapore, Singapore, 2000. [Google Scholar]
- Podlubny, I. Fractional Differential Equations; Academic Press: Cambridge, MA, USA, 1999. [Google Scholar]
- Tao, Y.; Chua, L.O. Impulsive stabilization for control and synchronization of chaotic systems: Theory and application to secure communication. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 1997, 44, 976–988. [Google Scholar]
- Li, C.L.; Mei, Z.; Feng, Z. Projective synchronization for a fractional-order chaotic system via single sinusoidal coupling. Optik-Int. J. Light Electron Opt. 2016, 127, 2830–2836. [Google Scholar]
- Munozpacheco, J.M.; Posadascastillo, C.; Zambranoserrano, E. The Effect of a Non-Local Fractional Operator in an Asymmetrical Glucose-Insulin Regulatory System: Analysis, Synchronization and Electronic Implementation. Symmetry 2020, 1395, 1395. [Google Scholar] [CrossRef]
- Winkler, M.; Butsch, S.; Kinzel, W. Pulsed chaos synchronization in networks with adaptive couplings. Phys. Rev. Stat. Nonlinear & Soft Matter Phys. 2012, 86, 016203. [Google Scholar]
- Nicholasgeorge, J.; Selvamani, R. Modified projective synchronization between fractional order complex chaotic systems. J. Phys. Conf. Ser. 2020, 1597, 012015. [Google Scholar] [CrossRef]
- Li, C.C.; Kang, Z.J. Synchronization Control of Complex Network Based on Extended Observer and Sliding Mode Control. IEEE Access 2020, 8, 77336–77343. [Google Scholar]
- Nourian, A.; Balochian, S. The adaptive synchronization of fractional-order Liu chaotic system with unknown parameters. Pramana J. Phys. 2016, 86, 1401–1407. [Google Scholar] [CrossRef]
- Wang, Z.P.; Wu, H.N. Synchronization of chaotic systems using fuzzy impulsive control(Article). Nonlinear Dyn. 2014, 78, 729–742. [Google Scholar] [CrossRef]
- Yaghooti, B.; Shadbad, A.S.; Safavi, K.; Salarieh, H. Adaptive synchronization of uncertain fractional-order chaotic systems using sliding mode control techniques. Proc. Inst. Mech. Eng. Part I J. Syst. Control. Eng. 2020, 234, 3–9. [Google Scholar] [CrossRef]
- Tsimring, L.S.; Sushchik, M.M. Multiplexing chaotic signals using synchronization. Phys. Lett. A 1996, 213, 155–166. [Google Scholar] [CrossRef]
- Yun, L.; Davis, P. Dual synchronization of chaos. Phys. Rev. E 2000, 61, R2176–R2184. [Google Scholar]
- Han, L.X. Dual synchronization based on two different chaotic systems: Lorenz systems and Rössler systems. J. Comput. Appl. Math. 2006, 206, 1046–1050. [Google Scholar]
- Salarieh, H.; Shahrokhi, M. Dual synchronization of chaotic systems via time-varying gain proportional feedback. Chaos Solitons Fractals 2008, 38, 1342–1348. [Google Scholar] [CrossRef]
- Dibakar, G.; Roy, C.A. Dual-anticipating, dual and dual-lag synchronization in modulated time-delayed systems. Phys. Lett. A 2010, 374, 3425–3436. [Google Scholar]
- Sun, J.W.; Jiang, S.X.; Cui, G.Z.; Wang, Y. Dual Combination Synchronization of Six Chaotic Systems. J. Comput. Nonlinear Dyn. 2016, 11, 034501. [Google Scholar] [CrossRef]
- Mahmoud, G.M.; Farghaly, A.A.; Abed-Elhameed, T.M.; Darwish, M.M. Adaptive Dual Synchronization of Chaotic (Hyperchaotic) Complex Systems with Uncertain Parameters and Its Application in Image Encryption. Acta Phys. Pol. B 2018, 49, 1923–1939. [Google Scholar] [CrossRef]
- Ibraheem, A. Multi-switching Dual Combination Synchronization of Time Delay Dynamical Systems for Fully Unknown Parameters via Adaptive Control. Arab. J. Sci. Eng. 2020, 45, 6911–6922. [Google Scholar] [CrossRef]
- Li, Y.; Chen, Y.Q.; Podlubny, I. Mittag-Leffler stability of fractional order nonlinear dynamic systems. Automatica 2009, 45, 1965–1969. [Google Scholar] [CrossRef]
- Caponetto, R.; Ebrary, I. Fractional Order Systems: Modeling and Control Applications; World Scientific: Singapore, Singapore, 2010. [Google Scholar]
- Zhang, Q.; Xiao, J.; Zhang, X.Q.; Cao, D.Y. Dual projective synchronization between integer-order and fractional-order chaotic systems. Optik-Int. J. Light Electron Opt. 2017, 141, 90–98. [Google Scholar] [CrossRef]
- Vijay, K.Y.; Rakesh, K.; Subir, B.; Kumar, R. Dual phase and dual anti-phase synchronization of fractional order chaotic systems in real and complex variables with uncertainties. Chin. J. Phys. 2019, 57, 282–308. [Google Scholar]
- Aguila-Camacho, N.; Duarte-Mermoud, M.A.; Gallegos, J.A. Lyapunov functions for fractional order systems. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 2951–2957. [Google Scholar] [CrossRef]
- Li, Y.; Chen, Y.Q.; Podlubny, I. Stability of fractional-order nonlinear dynamic systems: Lyapunov direct method and generalized Mittag-Leffler stability. Comput. Math. Appl. 2009, 59, 1810–1821. [Google Scholar] [CrossRef] [Green Version]
- Sui, L.L. Hyperchaos and Synchronization of Fractional Chen and Lü Systems; Taiyuan University of Technology: Taiyuan, China, 2011. [Google Scholar]
- Liu, C.X. Fractional Order Chaotic Circuit Theory and Application; Xi’an Jiaotong University Press: Xi’an, China, 2011. [Google Scholar]
- Qiang, J. Projective synchronization of a new hyperchaotic Lorenz system. Phys. Lett. A 2007, 370, 40–45. [Google Scholar]
- Feketa, P.; Schaum, A.; Meurer, T. Synchronization and multi-cluster capabilities of oscillatory networks with adaptive coupling. IEEE Trans. Autom. Control 2020, 66, 1. [Google Scholar]
- Gambuzza, L.V.; Frasca, M.; Latora, V. Distributed Control of Synchronization of a Group of Network Nodes. IEEE Trans. Autom. Control 2018, 64, 365–372. [Google Scholar] [CrossRef]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, D.; Li, T.; Wang, Y. Adaptive Dual Synchronization of Fractional-Order Chaotic System with Uncertain Parameters. Mathematics 2022, 10, 470. https://doi.org/10.3390/math10030470
Liu D, Li T, Wang Y. Adaptive Dual Synchronization of Fractional-Order Chaotic System with Uncertain Parameters. Mathematics. 2022; 10(3):470. https://doi.org/10.3390/math10030470
Chicago/Turabian StyleLiu, Dehui, Tianzeng Li, and Yu Wang. 2022. "Adaptive Dual Synchronization of Fractional-Order Chaotic System with Uncertain Parameters" Mathematics 10, no. 3: 470. https://doi.org/10.3390/math10030470