
Adaptive Sliding Mode Attitude-Tracking Control of Spacecraft with Prescribed Time Performance


Abstract
:1. Introduction
- (i)
- (ii)
- (iii)
- The first-order sliding mode differentiator (FOSD) is used to solve the issue of “explosion of complexity" caused by the traditional backstepping method. The proposed control scheme avoids the calculation of the derivative for the virtual controller and greatly reduces the computational burden.
2. Model Description and Problem Statement
2.1. Notation
2.2. Attitude Dynamics and Kinematics of Speerschaft
2.3. Relative Attitude Error Dynamics and Kinematics
2.4. Problem Statement
3. Controller Design and Stability Analysis
3.1. Novel Finite-Time Performance Function (FTPF)
3.2. Error Transformation
3.3. Controller Design
3.4. Stability Analysis
4. Numerical Simulations
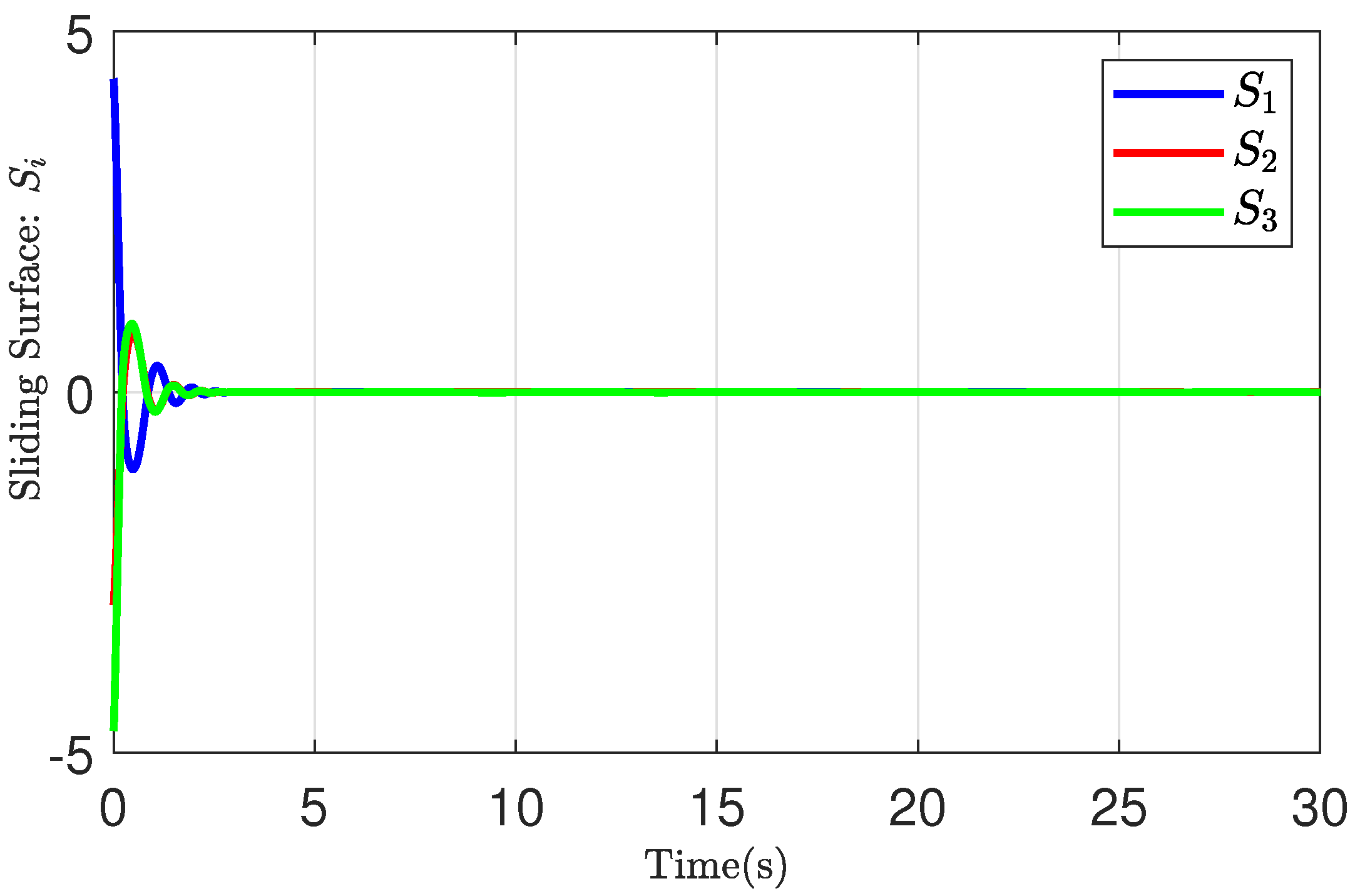
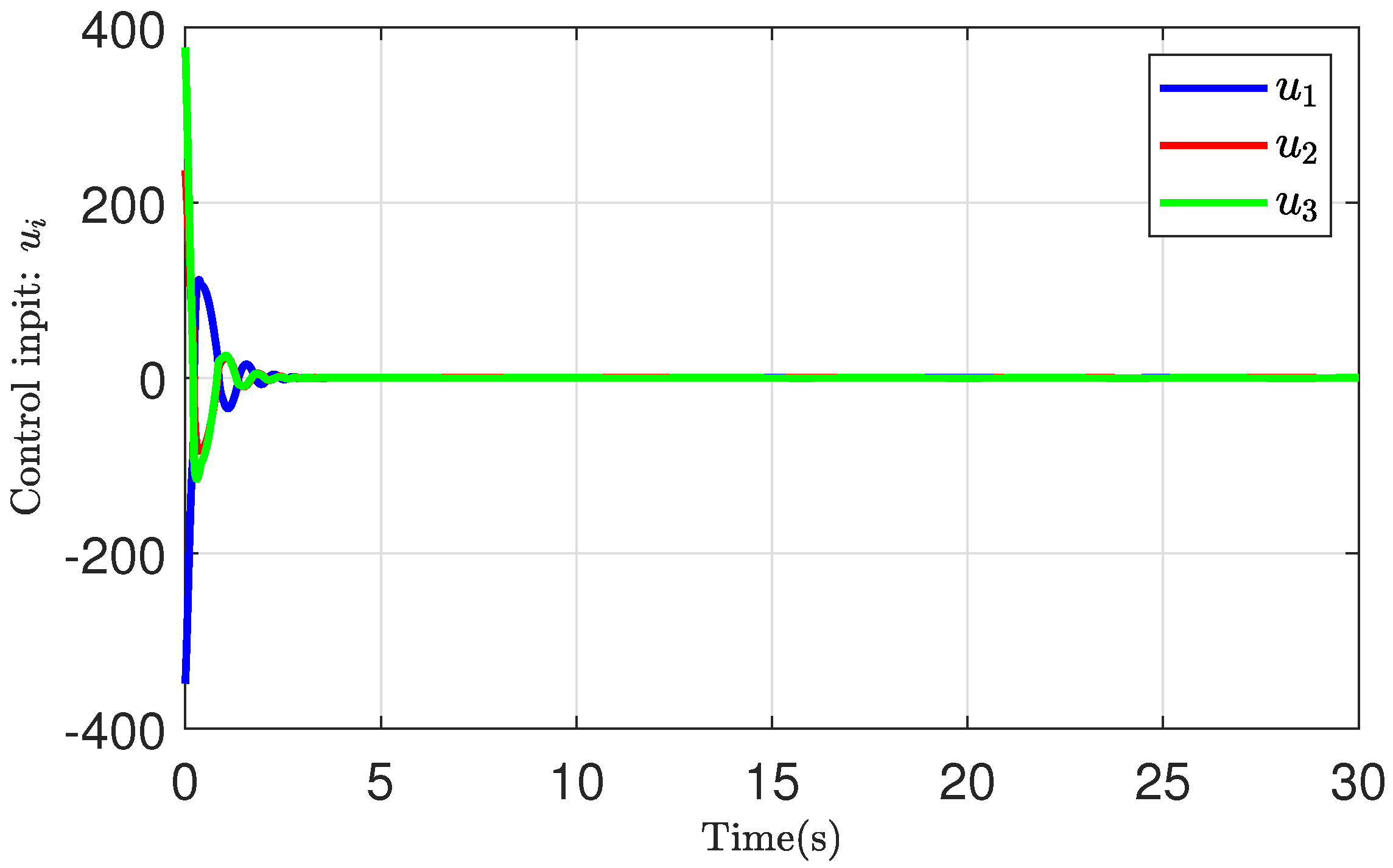
4.1. Attitude-Tracking Performance
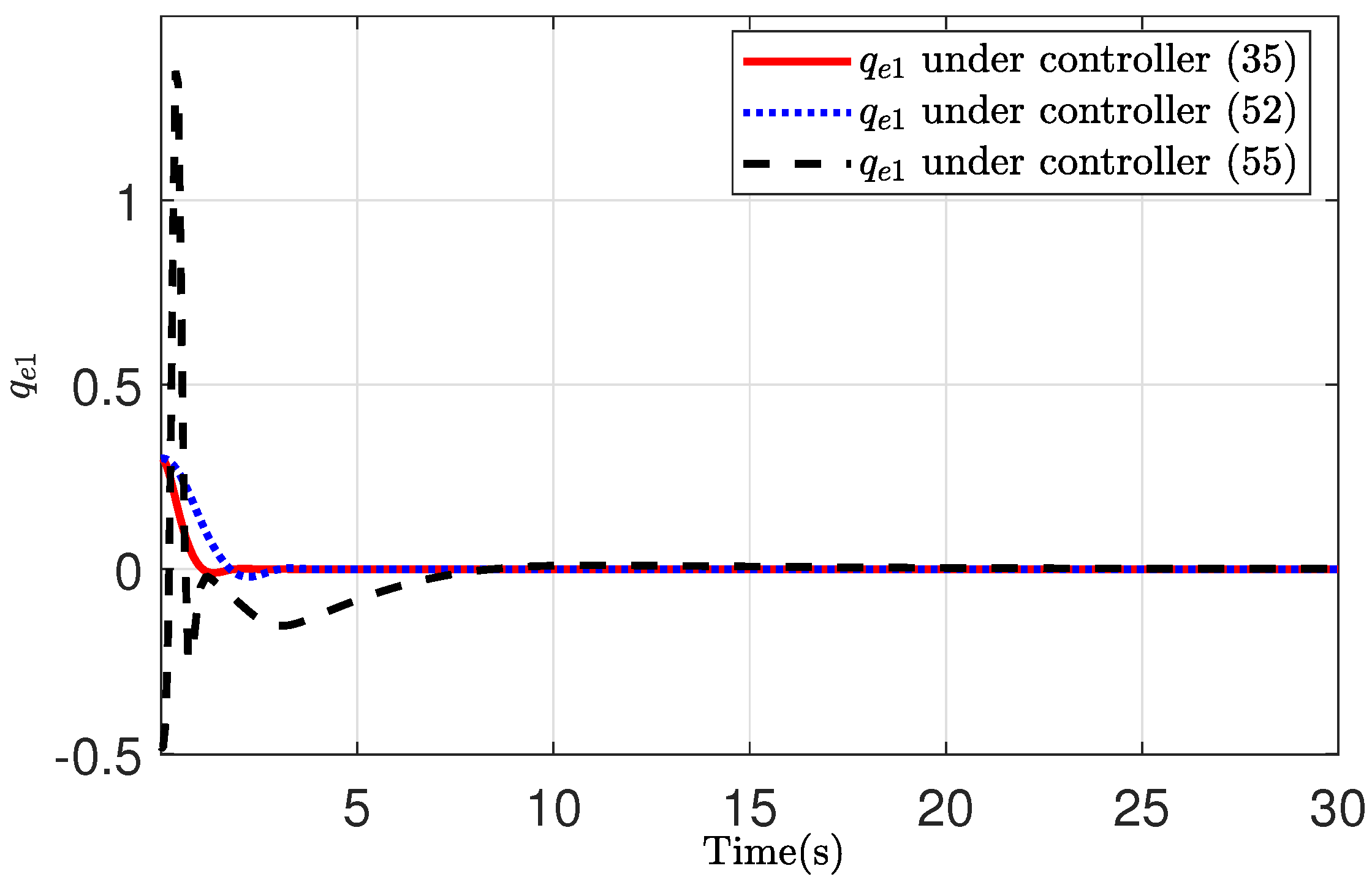
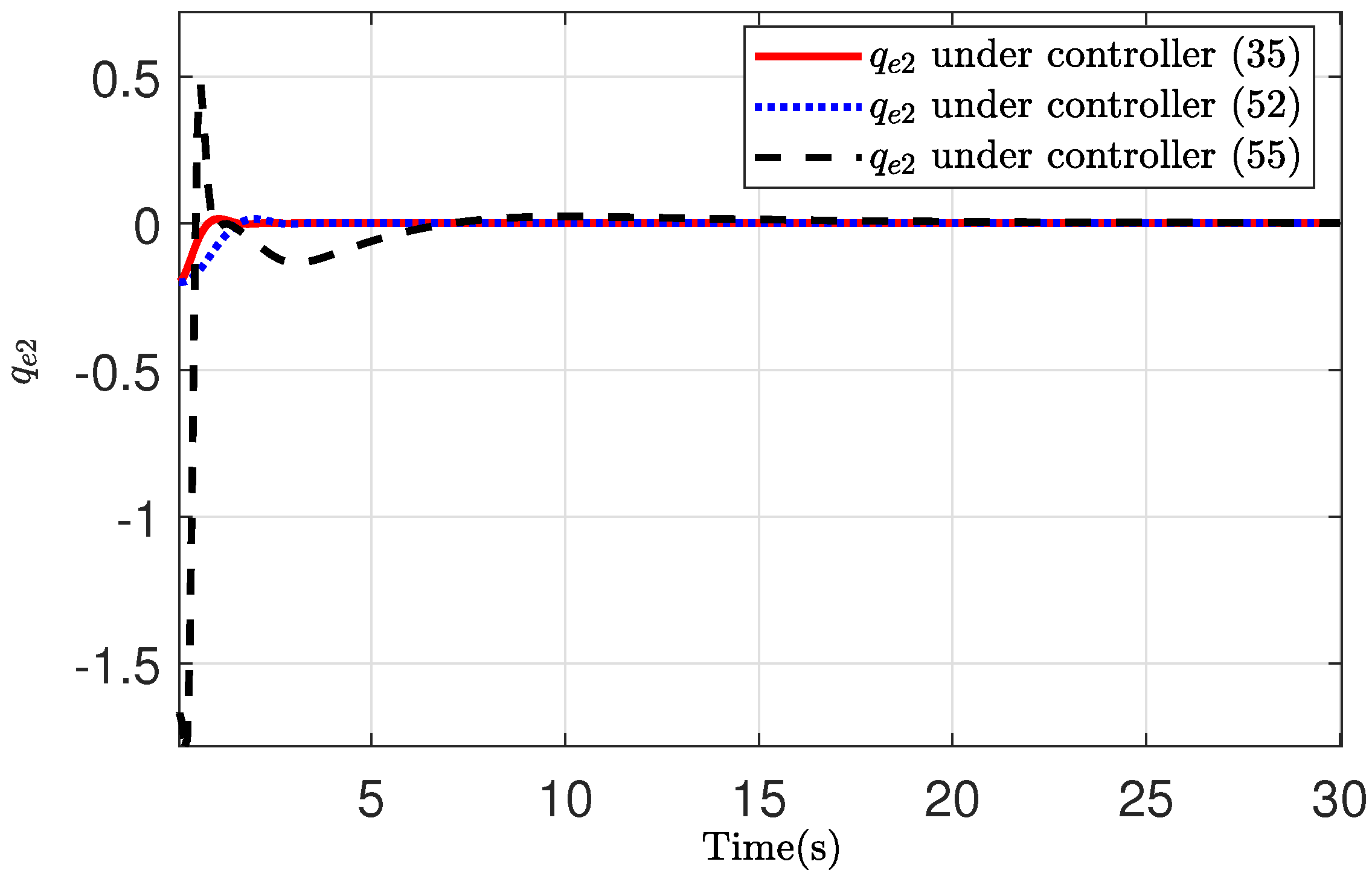
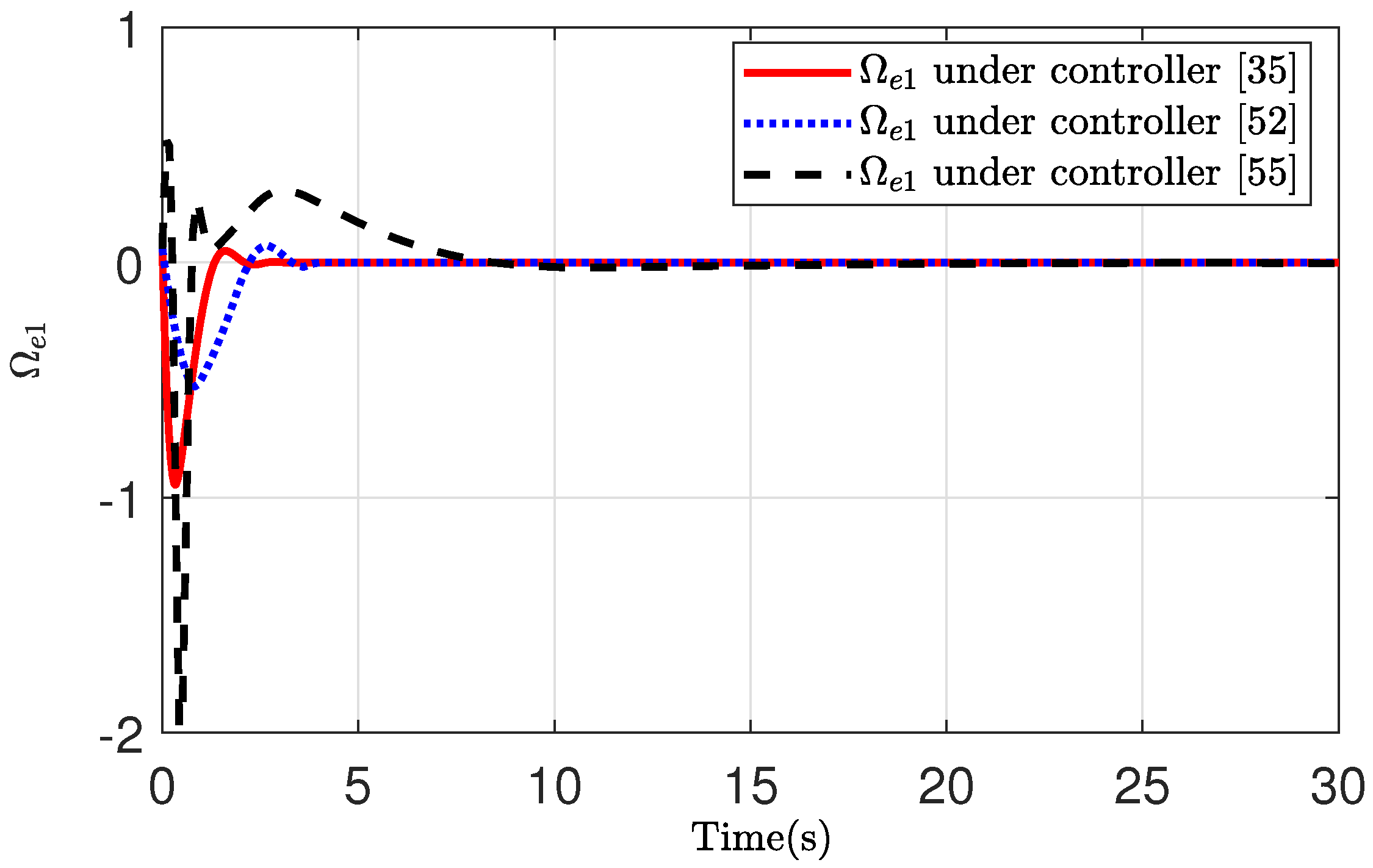
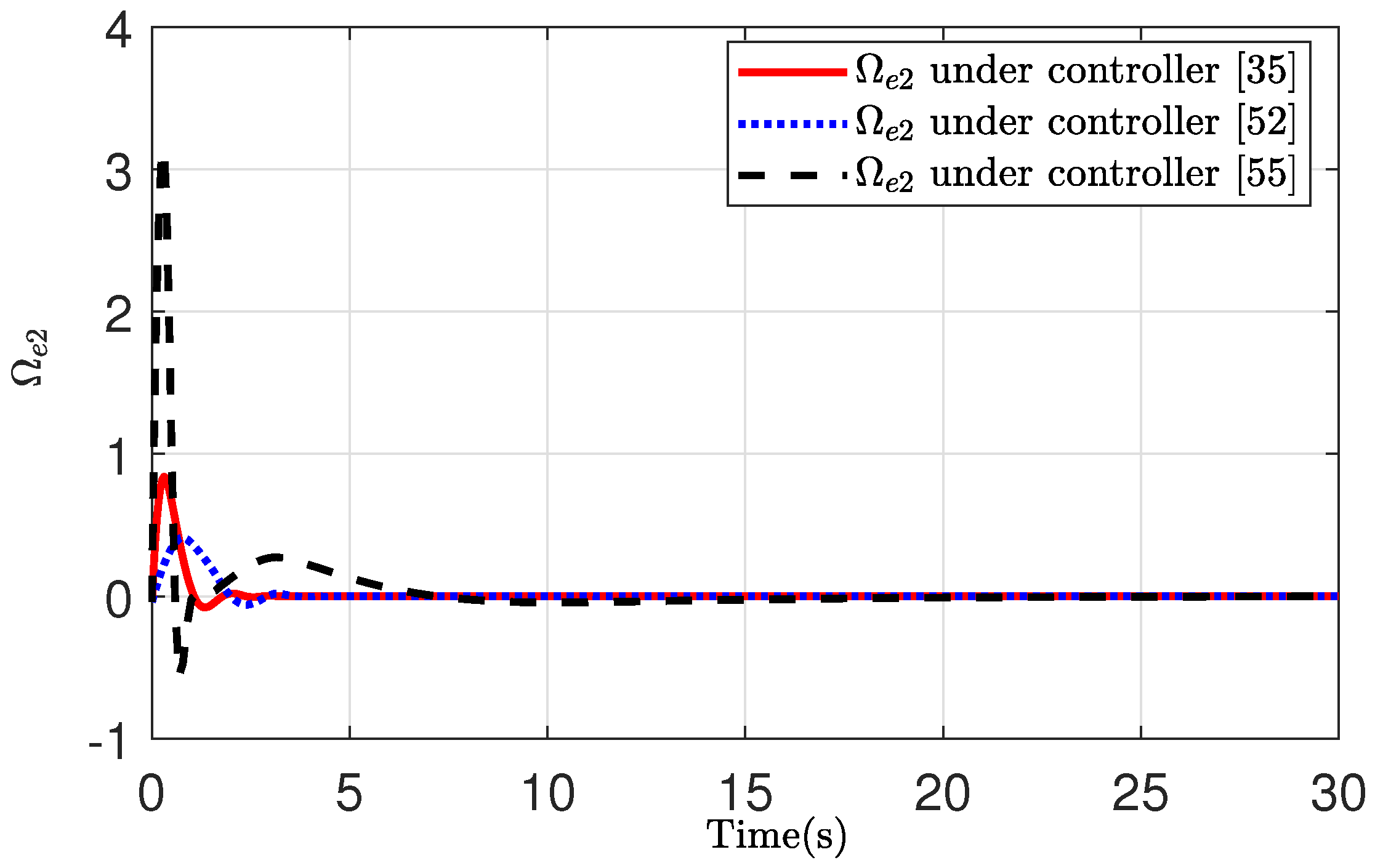
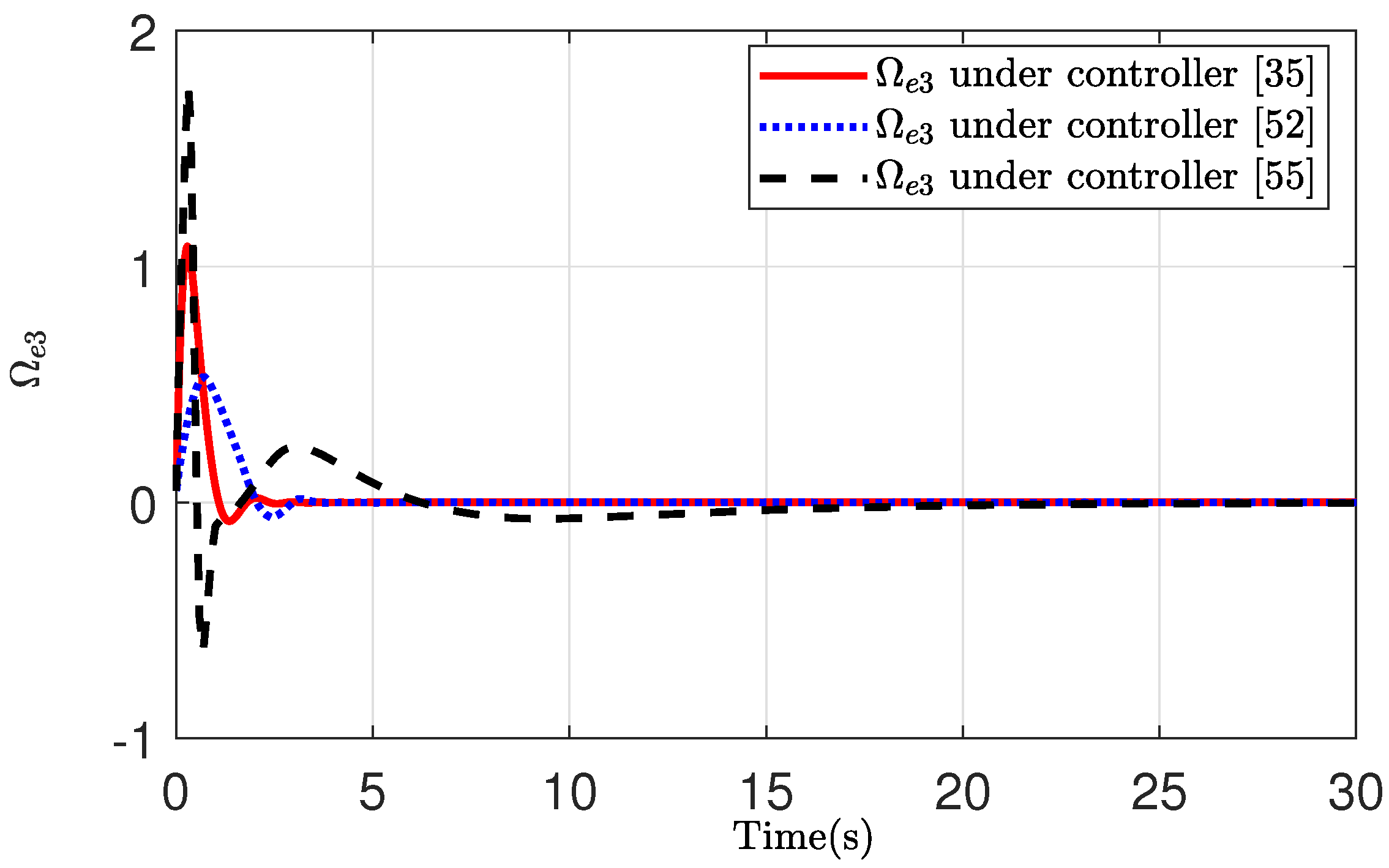
4.2. Comparative Simulations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wang, M.; Chen, B.; Liu, X. Adaptive fuzzy tracking control for a class of perturbed strict-feedback nonlinear time-delay systems. Fuzzy. Sets. Syst. 2008, 159, 949–967. [Google Scholar] [CrossRef]
- Zuo, Z.; Tie, L. Distributed robust finite-time nonlinear consensus protocols for multi-agent systems. Int. J. Syst. Sci. 2016, 47, 1366–1375. [Google Scholar] [CrossRef]
- Du, H.; Li, S.; Qian, C. Finite-time attitude-tracking control of spacecraft with application to attitude synchronization. IEEE Trans. Automat. Contr. 2011, 56, 2711–2717. [Google Scholar] [CrossRef]
- Xia, Y.; Zhu, Z.; Wang, S. Attitude-tracking of rigid spacecraft with bounded disturbances. IEEE Trans. Ind. Electron. 2010, 58, 647–659. [Google Scholar] [CrossRef]
- Niu, B.; Zhao, J. Tracking control for output-constrained nonlinear switched systems with a barrier Lyapunov function. Int. J. Syst. Sci. 2013, 44, 978–985. [Google Scholar] [CrossRef]
- Xiao, B.; Shen, Y.; Wu, L. A structure simple controller for satellite attitude-tracking maneuver. IEEE Trans. Ind. Electron. 2016, 64, 1436–1446. [Google Scholar] [CrossRef]
- Lee, T. Robust Adaptive attitude-tracking on SO(3) with an application to a quadrotor UAV. IEEE Trans. Control Syst. Technol. 2012, 21, 1924–1930. [Google Scholar]
- Zou, L.; Wang, Z.D.; Han, Q.L. Tracking Control Under Round-Robin Scheduling: Handling Impulsive Transmission Outliers. IEEE Trans. Cybern. 2021. [Google Scholar] [CrossRef]
- Luo, W.; Chu, Y.; Ling, K. Inverse optimal adaptive control for attitude-tracking of spacecraft. IEEE. Trans. Automat. Contr. 2005, 50, 1639–1654. [Google Scholar]
- Chen, Z.; Jie, H. Attitude-tracking and disturbance rejection of rigid spacecraft by adaptive control. IEEE Trans. Automat. Contr. 2009, 54, 600–605. [Google Scholar] [CrossRef]
- Wang, M.; Chen, B.; Zhang, S. Adaptive neural tracking control of nonlinear timedelay systems with disturbances. Int. J. Adapt. Control Signal. Process. 2009, 23, 1031–1049. [Google Scholar] [CrossRef]
- Sun, L.; Zheng, Z. Saturated adaptive hierarchical fuzzy attitude-tracking control of rigid spacecraft with modeling and measurement uncertainties. IEEE Trans. Ind. Electron. 2018, 66, 3742–3751. [Google Scholar] [CrossRef]
- Zou, A.M.; Krishna, D.K. Adaptive fuzzy fault-tolerant attitude control of spacecraft. Control Eng. Pract. 2011, 19, 10–21. [Google Scholar] [CrossRef]
- Liu, Y.; Yang, G.H.; Li, X.J. Fault-tolerant control for uncertain linear systems via adaptive and LMI approaches. Int. J. Syst. Sci. 2017, 48, 347–356. [Google Scholar] [CrossRef]
- Sari, N.N.; Jahanshahi, H.; Fakoor, M. Adaptive fuzzy PID controlstrategy for spacecraft attitude control. Int. J. Fuzzy. Syst. Control 2019, 21, 769–781. [Google Scholar] [CrossRef]
- Hu, Q.; Wang, Z.D.; Gao, H. Sliding mode and shaped input vibration control of flexible systems. IEEE Trans. Aerosp. Electron. Syst. 2008, 44, 503–519. [Google Scholar]
- Niu, Y.; Ho, D.; Wang, Z.D. Improved sliding mode control for discrete-time systems via reaching law. IET. Control Theory Appl. 2010, 4, 2245–2251. [Google Scholar] [CrossRef]
- Hu, J.; Wang, Z.D.; Gao, H. Robust sliding mode control for discrete stochastic systems with mixed time delays, randomly occurring uncertainties, and randomly occurring nonlinearities. IEEE Trans. Ind. Electron. 2011, 59, 3008–3015. [Google Scholar] [CrossRef] [Green Version]
- Qiang, S.; Wang, D.W.; Zhu, S.Q. Inertia-free fault-tolerant spacecraft attitude-tracking using control allocation. Automatica 2015, 62, 114–121. [Google Scholar]
- Gu, X.; Jia, T.; Niu, Y. Consensus tracking for multi-agent systems subject to channel fading: A sliding mode control method. Int. J. Syst. Sci. 2020, 51, 2703–2711. [Google Scholar] [CrossRef]
- Vadali, S.R. Variable-structure control of spacecraft large-angle maneuvers. J. Guid. Control Dyn. 1986, 9, 235–239. [Google Scholar] [CrossRef]
- Pukdeboon, C.; Zinober, A.S. Quasi-continuous higher order sliding-mode controllers for spacecraft attitude-tracking maneuvers. IEEE Trans. Ind. Electron. 2009, 57, 1436–1444. [Google Scholar] [CrossRef] [Green Version]
- Huo, B.Y.; Xia, Y.Q. Attitude stabilization of rigid spacecraft with finite-time convergence. Int. J. Robust Nonlinear Control 2011, 21, 686–702. [Google Scholar]
- Huo, B.Y.; Xia, Y.Q.; Lu, K.F. Adaptive fuzzy finite-time fault-tolerant attitude control of rigid spacecraft. J. Franklin. Inst. 2015, 352, 4225–4246. [Google Scholar] [CrossRef]
- Huo, B.Y.; Xia, Y.Q.; Yin, L. Fuzzy adaptive fault-tolerant output feedback attitude-tracking control of rigid spacecraft. IEEE Trans. Syst. Man Cybern. Syst. 2016, 47, 1898–1908. [Google Scholar] [CrossRef]
- Zhao, L.; Jia, Y. Neural network-based adaptive consensus tracking control for multi-agent systems under actuator faults. Int. J. Syst. Sci. 2016, 47, 1931–1942. [Google Scholar] [CrossRef]
- Xing, L.; Zhang, J. Fuzzy logic based adaptive event triggered sliding mode control for spacecraft attitude tracking. Aerosp. Sci. Technol. 2021, 108, 106394. [Google Scholar] [CrossRef]
- Zou, A.M. Finite-time attitude-tracking control for spacecraft using terminal sliding mode and Chebyshev neural network. IEEE Trans. Syst. Man Cybern. Syst. 2011, 41, 950–963. [Google Scholar]
- Cui, B.; Xia, Y.Q.; Liu, K. Truly Distributed Finite-Time Attitude Formation-Containment Control for Networked Uncertain Rigid Spacecraft. IEEE Trans. Cybern. 2020. [Google Scholar] [CrossRef]
- Bechlioulis, C.P.; Rovithakis, G.A. Prescribed performance adaptive control of SISO feedback linearizable systems with disturbances. In Proceedings of the 16th Mediterranean Conference on Control and Automation, Ajaccio, France, 25–27 June 2008; pp. 1035–1040. [Google Scholar]
- Bechlioulis, C.P.; Rovithakis, G.A. Robust adaptive control of feedback linearizable MIMO nonlinear systems with prescribed performance. IEEE Trans. Automat. Contr. 2008, 53, 2090–2099. [Google Scholar] [CrossRef]
- Wang, M.; Ye, H.; Chen, Z. Neural learning control of flexible joint manipulator with predefined tracking performance and application to baxter robot. Complexity 2017, 2017, 1–14. [Google Scholar] [CrossRef]
- Wang, M.; Yang, A. Dynamic learning from adaptive neural control of robot manipulators with prescribed performance. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 2244–2255. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, X.P.; Jing, Y.W. Adaptive neural networks finite-time tracking control for non-strict feedback systems via prescribed performance. Inf. Sci. 2018, 468, 29–46. [Google Scholar] [CrossRef]
- Wei, C.; Luo, J.; Dai, H. Learning-based adaptive attitude control of spacecraft formation with guaranteed prescribed performance. IEEE Trans. Cybern. 2018, 49, 4004–4016. [Google Scholar] [CrossRef] [PubMed]
- Jing, Y.W.; Liu, Y.; Zhou, S.W. Prescribed performance finite-time tracking control for uncertain nonlinear systems. J. Syst. Sci. Complex. 2019, 32, 803–817. [Google Scholar] [CrossRef]
- Gao, S.; Liu, X.; Jing, Y.; Dimirovski, G.M. A novel finite-time prescribed performance control scheme for spacecraft attitude-tracking. Aerosp. Sci. Technol. 2021, 118, 107044. [Google Scholar] [CrossRef]
- Levant, A. Robust exact differentiation via sliding mode technique. Automatica 1998, 34, 379–384. [Google Scholar] [CrossRef]
- Khalil, H.K. Nonlinear Systems, 3rd ed.; Patience Hall: Hoboken, NJ, USA, 2002. [Google Scholar]
- Hu, Q.; Shao, X.; Guo, L. Adaptive fault-tolerant attitude tracking control of spacecraft with prescribed performance. IEEE ASME Trans. Mechatron. 2017, 23, 331–341. [Google Scholar] [CrossRef]
- Tao, J.W.; Tao, Z.; Liu, Q.R. Novel finite-time adaptive neural control of flexible spacecraft with actuator constraints and prescribed attitude-tracking performance. Acta Astronaut. 2021, 179, 646–658. [Google Scholar] [CrossRef]
- Lu, K.; Xia, Y. Adaptive attitude tracking control for rigid spacecraft with finite-time convergence. Automatica 2013, 49, 3591–3599. [Google Scholar] [CrossRef]
- Hu, Q.; Shao, X. Smooth finite-time fault-tolerant attitude tracking control for rigid spacecraft. Aerospace Sci. Technol. 2016, 55, 144–157. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Steady-State Tracking Errors | Under (35) | Under (52) | Under (55) |
|---|---|---|---|
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, R.; Wang, Z.; Che, W. Adaptive Sliding Mode Attitude-Tracking Control of Spacecraft with Prescribed Time Performance. Mathematics 2022, 10, 401. https://doi.org/10.3390/math10030401
Chen R, Wang Z, Che W. Adaptive Sliding Mode Attitude-Tracking Control of Spacecraft with Prescribed Time Performance. Mathematics. 2022; 10(3):401. https://doi.org/10.3390/math10030401
Chicago/Turabian StyleChen, Runze, Zhenling Wang, and Weiwei Che. 2022. "Adaptive Sliding Mode Attitude-Tracking Control of Spacecraft with Prescribed Time Performance" Mathematics 10, no. 3: 401. https://doi.org/10.3390/math10030401