1. Introduction and Preliminaries
Since Kalman demonstrated the widespread use of algebraic Riccati equations (ARE) in filtering theory and optimal control [
1], ARE have drawn significant attention in science, applied mathematics, and a variety of engineering problems, including controlling doubly-fed wind generators [
2], wheeled inverted pendulums [
3], and linear multi-agent systems [
4]. Particularly, the continuous-time algebraic Riccati equation (CARE) [
5,
6,
7,
8,
9,
10],
is a quadratic matrix equation that is essential to Kalman filtering [
5], linear–quadratic regulator, linear–quadratic–Gaussian and
control [
6,
7,
8], and co-prime or spectral factorizations [
9,
10]. Note that the superscript
signifies transposition,
signifies the
zero matrix and all the coefficient matrices in (
1) belong to
, whereas
B and
Q are symmetric and non-negative definite matrices (i.e.,
and
). The solution set for the CARE can either have an infinite or finite number of symmetric or non-symmetric solutions
with indefinite or definite signs. In this study, the following time-varying ARE (TV-ARE) [
11,
12] is addressed using the zeroing neural network (ZNN):
where
t signifies the time, all the time-varying coefficient matrices belong to
, and the matrices
,
are symmetric and non-negative definite. More specifically, this study proposes and examines two models: a higher-order ZNN (HOZNN) model that produces numerical TV-ARE real symmetric solutions, and a noise-handling HOZNN (NHOZNN) model that produces numerical TV-ARE real symmetric solutions when noise is present. It is important to mention that the TV-ARE (
2) is based on the frozen-time (or forward-in-time) ARE [
13,
14] and has widely been used in the field of optimal control to stabilize linear time-varying systems with excellent performance; applications include controlling a Quanser 3 DOF Hover system [
14], a spring-constrained mass with time-dependent stiffness [
11], an elastic beam [
13], and various numerical control cases [
12,
15]. Additionally, linear time-varying systems may be stabilized more effectively the faster the ZNN model for solving the TV-ARE converges, which improves the ZNN-based controller’s performance [
11,
12]. The novel NZNN and NHOZNN designs for solving the TV-ARE are particularly valuable for future research because ZNN models have not yet been employed in linear time-varying systems with noise. Therefore, it is crucial to conduct more research on ZNN models for addressing the TV-ARE (
2).
The ZNN approach, created by Zhang et al. in [
16], is based on the Hopfield neural network and is utilized to generate online solutions to time-varying problems. It is important to note that the great majority of ZNN dynamical systems fall within the class of recurrent neural networks, which are employed for finding equation zeros. The ZNN approach has been extensively studied and has been applied to a wide range of time-varying problems, with the principal applications being problems of matrix equation systems [
17,
18], tensor and matrix inversion [
19], quadratic optimization [
20], linear equations systems [
18,
19], generalized inversion [
21], and approximation of many matrix functions [
22,
23,
24]. Defining an error matrix equation (EME),
, for the underlying problem is the initial step in producing ZNN dynamics. The next step takes advantage of the dynamical evolution [
16]:
where
is a design parameter that is utilized to scale the convergence,
signifies the time derivative, whereas
denotes element-wise utilization of an odd and increasing activation function (AF) on
.
The family of hyperpower iterations has undergone substantial study and modification in recent years [
25,
26,
27,
28,
29]. However, because iterative methods are implementable to discrete-time models and since these methods typically need initial conditions that are estimated and occasionally may not be easily satisfied, numerous continuous-time HOZNN models were introduced and examined in [
22,
30,
31]. Starting from the following hyperpower iterations with order
[
29,
30]:
where
signifies an appropriate time-invariant EME, the time-invariant (
4) can be extended to a time-varying case. That is, considering the EME below:
where
and
, the general HOZNN dynamical evolution can be obtained by combining the ZNN design and the hyperpower iterations method [
22,
30,
31]:
for finding the online solution to a time-varying problem. In this study, we investigate the HOZNN evolution (
6) under the linear AF, which results in the following:
A modified noise-handling model for addressing time-varying problems was introduced and studied in [
32] due to the fact that every type of noise has a great effect on the proposed ZNN methods’ accuracy and that any preprocessing for a noise reduction adds time, jeopardizing desired real-time requirements. Particularly, the following noise-handling ZNN (NZNN) dynamical system was defined [
32]:
where
and
are design parameters which monitor the convergence of NZNN and
signifies the matrix-form noises of appropriate dimensions. Note that the generalization of the NZNN design to the NHOZNN form for approximating a time-varying problem was introduced and investigated in [
31]. With the same principle as the HOZNN design in (
5)–(
7), the general NHOZNN dynamical evolution can be obtained by combining the NZNN design and the hyperpower iterations method:
The following are the main points of this research:
A new HOZNN model that produces numerical TV-ARE real symmetric solutions.
A novel NHOZNN model that produces numerical TV-ARE real symmetric solutions when noise is present.
All models are effective for solving the TV-ARE, according to two numerical experiments that include three different types of noise. Both the HOZNN and NHOZNN models converge to the TV-ARE solution faster than the corresponding ZNN and NZNN models.
Few of the paper’s basic symbols are also worth noting: and I signify the all-ones and identity matrices with dimensions , respectively; signifies the zero matrix with dimensions ; signifies the identity matrix with dimensions ; ⊗ denotes the Kronecker product; denotes the vectorization procedure; denotes the matrix Frobenius norm.
The following is the structure of the paper: The HOZNN model that produces numerical TV-ARE solutions is defined and analyzed in
Section 2, while the NHOZNN model that produces numerical TV-ARE solutions when noise is present is described and analyzed in
Section 3. The results of two experiments for addressing the TV-ARE under three different types of noise are shown and analyzed in
Section 4. Last,
Section 5 includes the last comments and inferences.
2. Higher-Order ZNN for Solving the TV-ARE
This section introduces and analyzes the HOZNN model that solves the TV-ARE (
2). Based on the following EME of ZNN design from [
11]:
where
is the unknown solution of the TV-ARE, while its derivative is
the following EME is defined in the case of the HOZNN design:
while its derivative is:
the replacement
in (
13) transforms each of the summations into zero matrices, except the summand corresponding to
,
. Hence, (
13) is approximated as:
where
is the first derivative of
defined in (
11). This leads to the following dynamical system:
Theorem 1. Assume that are differentiable and , are non-negative definite and symmetric matrices. The dynamical system (15) converges to the theoretical solution of TV-ARE (2), for each integer . Based on Lyapunov, the solution is stable. Proof. The substitution
implies
, where
is a theoretical solution. The time derivative of
is
. Notice that
and its first derivative
As a result, after substituting
into (
12), one can verify
Further, the implicit dynamics (
15) imply
To confirm convergence, the candidate Lyapunov function is determined as follows:
Then, the next identities can be verified:
Since
is the equilibrium point of the system (
19) and
, we have that:
The equilibrium state is stable as a result of the Lyapunov stability theory. Consequently, as . □
Therefore, in view of (
15), it follows the expanded HOZNN design for addressing the TV-ARE problem:
or equivalently
In order to solve (
25) through the HOZNN approach,
cannot be contained in the mass matrix of (
25). As a result, we set
the vectorized right part of (
25), i.e.,
and vectorize the left part of (
25), i.e.,
As the goal of this research is to explicitly discover real symmetric solutions, we only have to locate the components of
positioned on and above its main diagonal. Therefore, it is significant to use
in place of
by positioning the aforementioned components of
into the vector
. In this approach, the dimension of (
27) is reduced, while
is compelled to be a symmetric matrix.
Therefore, the next equation that substitutes
in (
27) can be derived by employing the
components on and above the main diagonal of
:
where the matrix
is an operational matrix, which may be constructed by utilizing Algorithm 1. Note that the definitions of the notations zeros
, mod
, and floor
in Algorithm 1 match those of the respective MATLAB functions [
33]. Furthermore, the components on and above the main diagonal of
are stacked to form the column vector
.
| Algorithm 1 Calculation method for the operational matrix Z. |
- Require:
The columns or rows number n of a real symmetric matrix. - 1:
Put and zeros - 2:
fordo - 3:
Put mod and floor - 4:
if then - 5:
Put - 6:
else - 7:
Put - 8:
end if - 9:
end for - 10:
returnZ - Ensure:
The matrix Z.
|
Additionally, by setting
then, (
26), (
28), (
29) combined with (
25) provide the next implicit dynamics:
The next unified HOZNN model is obtained by multiplying both sides by
:
Therefore, (
31) is the recommended HOZNN model that may effectively be addressed by utilizing an ode MATLAB solver. It is worth noting that the product
is a state-dependent mass matrix.According to Theorem 2, the HOZNN model (
31) converges to the theoretical solution. It is important to mention that the HOZNN model (
31) for
becomes the ZNN model in [
11].
Theorem 2. Assume that are differentiable and , are non-negative definite and symmetric matrices. At each time , if the product with in (31) is non-singular then the HOZNN model (31) converges to the symmetric theoretical solution of TV-ARE (2) exponentially, beginning from any primary price , for each integer . Proof. The proof is omitted since it is similar to the proof in [
11] (Theorem 3.1) after replacing [
34] (Theorem 1) with Theorem 1. □
3. Noise-Tolerant HOZNN for Solving the TV-ARE
This section introduces and analyzes the NHOZNN model that solves the TV-ARE (
2) when noise is present. Consider the EMEs
in (
10) and
in (
12), as well as their derivatives
in (
11) and
in (
13). Replacing
and
into the NZNN design (
8), we have
or equivalent
The replacement
on the left-hand side of (
33) transforms each of the summations there into zero matrices, except the summand corresponding to
,
. As a result, we ended up with the following approximated higher-order design:
or equivalent
The performance of NHOZNN dynamics (
35) is investigated in the following theorems aimed to solve various types of noise, and restated from [
31].
Theorem 3 ([
31]).
Assume that are differentiable and , are non-negative definite and symmetric matrices. Then the NHOZNN dynamics (35) globally converge to the theoretical solution, despite the constant noise . Theorem 4 ([
31]).
Under the suppositions of Theorem 3, the NHOZNN dynamics (35) polluted with the linear noise is convergent towards the theoretical solution, with the upper bound of the EME fulfilling . In addition, satisfies , as Theorem 5 ([
31]).
Under the suppositions of Theorem 3, the NHOZNN dynamics (35) when there is bounded random noise , retain bounded residual error . In addition, of NHOZNN is bounded bywhere with parameters . Consequently, the upper bound of is in roughly inverse proportion to γ, and becomes arbitrarily low for sufficiently big γ and appropriate ζ in the instance of . Consequently, in view of (
35), it follows the expanded NHOZNN design for addressing the TV-ARE problem, when noise is present:
or equivalently
In order to solve (
37) through the HOZNN approach,
cannot be contained in the mass matrix of (
37). Also note that the intention of this research is to explicitly discover real symmetric solutions
. As a consequence, we use
instead of
as defined in (
28). Furthermore, since the left part of (
37) is identical to the left part of (
25), we use the vectorized left part
as defined in (
29) and vectorize the right part of (
37), that is
where
The fact that
is symmetric (see [
5]) implies that
and
are symmetric matrices as well.Therefore, it is significant to apply
in place of
by separating the
components that are positioned on and above its main diagonal into the vector
. We may therefore set the following:
Furthermore, to simplify the process of finding the matrix
, we set
As a result, we have the following dynamics instead of (
40):
The next unified NHOZNN model is obtained by multiplying both sides by
:
Therefore, (
44) is the recommended NHOZNN model that may effectively be addressed by utilizing an ode MATLAB solver. It is worth mentioning that the product
is a state-dependent mass matrix. Note that, with the exception of the difference between the solved problems, (
39) is calculated separately from the model’s dynamics described in [
31], whereas (
39) is incorporated into the dynamics of the NHOZNN model (
44) to reduce the computational cost in this paper. According to Theorem 6, the NHOZNN model (
44) converges to the theoretical solution when noise is present.
Theorem 6. Assume that are differentiable and , are non-negative definite and symmetric matrices. At each time , if the product with in (44) is non-singular then the NHOZNN model (44) converges to the theoretical solution when noise is present exponentially, beginning from any primary price . Furthermore, the symmetric theoretical solution of TV-ARE (2) when noise is present, for each integer , is the last r components of . Proof. The proof is omitted since it is similar to the proof in [
11] (Theorem 3.1) after replacing [
34] (Theorem 1) with Theorems 3–5 for the constant noise, the linear noise and the bounded random noise, respectively. □
4. Computational Assessments
This section investigates the performance of the HOZNN (
31) and NHOZNN (
44) models in two numerical experiments (NEs), which involve solving the TV-ARE (
2). On the one hand, to investigate the performance of the HOZNN model, two different initial conditions (ICs) are used. Under the first IC (IC1), the HOZNN model produces the unique non-negative solution of the TV-ARE. The figures in this instance also include the Schur method solution [
5], which generates this specific solution. Under the second IC (IC2), the HOZNN model produces a random symmetric solution of the TV-ARE. On the other hand, to investigate the performance of the NHOZNN model, three different noises are used under IC2. These noises are the following:
Constant noise (CN):;
Linear noise (LN):;
Bounded random noise (BRN):.
It is important to note that in the figures legend, the subscript number to HOZNN and NHOZNN refer to the value of
p. Furthermore, it is important to mention that the HOZNN (
31) and NHOZNN (
44) models for
become the traditional ZNN models. That is, ZNN≡HOZNN
and NZNN≡NHOZNN
. Additionally, each model’s convergence is represented by its EME value (Error) for the corresponding model in terms of time per second (Time/s). Finally, during the computation of all NEs, the MATLAB solver ode15s is used under the time interval
, with the parameters
and
.
4.1. Numerical Experiment 1
Consider the following
input matrices:
By defining the ICs as below:
- IC1:
- IC2:
the findings of HOZNN and NHOZNN for
are depicted in
Figure 1 and
Figure 2. Specifically, the error
, referring to the HOZNN solutions
convergence, is presented in
Figure 1a,c for IC1 and IC2, respectively, while the trajectories of these solutions are shown in
Figure 1b,d. Under IC2, the error
referring to the NHOZNN solutions
convergence is shown in
Figure 2a,c,e for CN, LN, and BRN, respectively, whereas the trajectories of these solutions are depicted in
Figure 2b,d,f.
4.2. Numerical Experiment 2
Consider the following
input matrices:
After defining the next ICs:
- IC1:
- IC2:
the results of HOZNN and NHOZNN for
are depicted in
Figure 1 and
Figure 2. Particularly, the error
referring to the HOZNN solutions
convergence is presented in
Figure 2e,g for IC1 and IC2, respectively, whereas the trajectories of these solutions are shown in
Figure 2f,h. Under IC2, the error
referring to the NHOZNN solutions
convergence is shown in
Figure 2g,i,k for CN, LN, and BRN, respectively, whereas the trajectories of these solutions are depicted in
Figure 2h,j,l.
4.3. Numerical Experiments Discussion
The performance of the HOZNN and NHOZNN models for solving the TV-ARE is investigated through NEs
Section 4.1 and
Section 4.2. Keep in mind that when the EME of the ZNN, HOZNN, NZNN, and NHOZNN models converge to the zero matrix, the models converge to the theoretical solution. In other words, the solution generated by the ZNN, HOZNN, NZNN, and NHOZNN models makes the equality in the TV-ARE true. As a consequence, by looking at the EME values in the related figures, we can trust the solutions produced by the models.
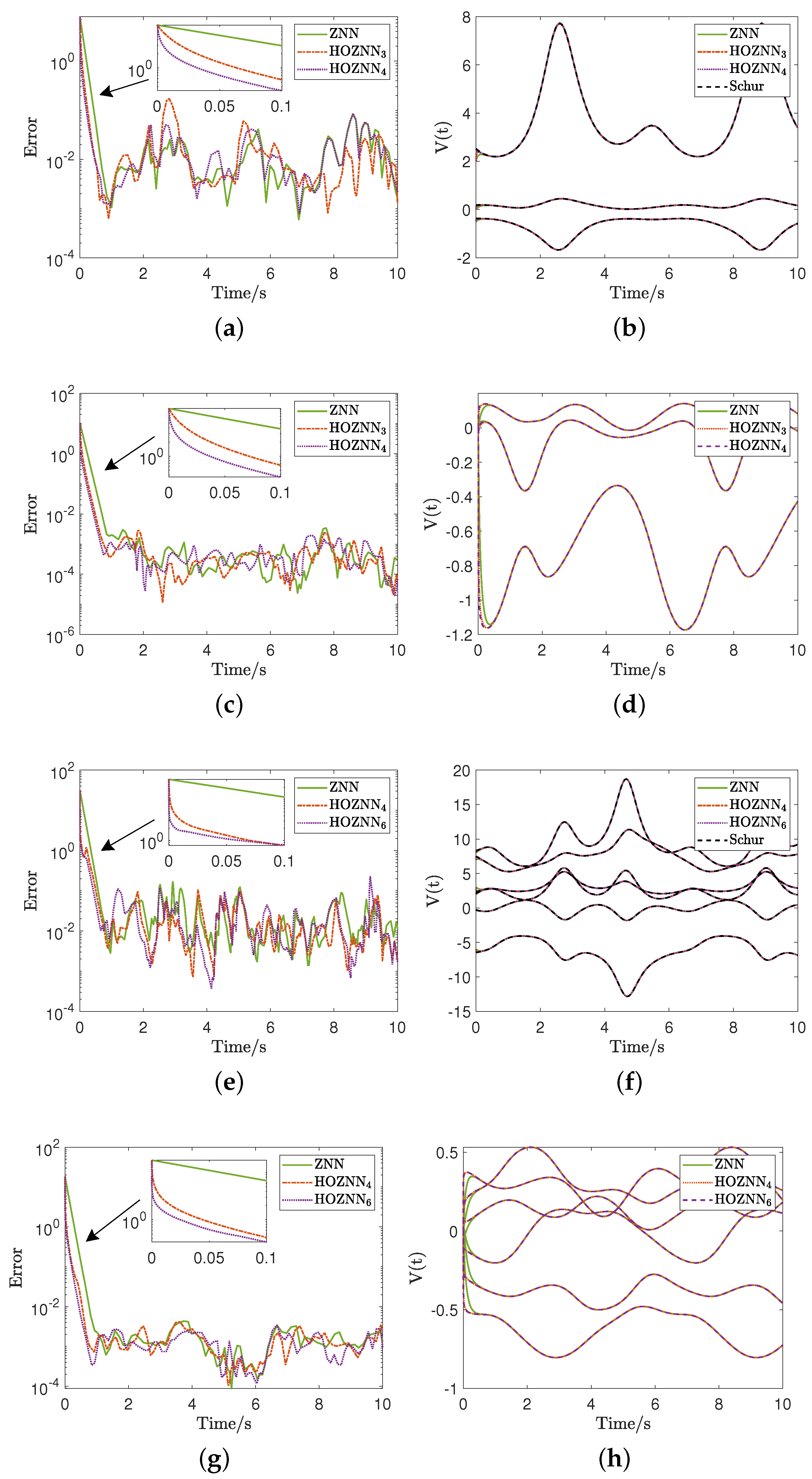
In the case of the HOZNN model, the findings are presented in
Figure 1. As can be observed in
Figure 1b,f, the HOZNN model yields the unique non-negative solution of the TV-ARE under IC1, which is identical to the Schur method solution. However, as can be seen in
Figure 1d,h, the HOZNN model yields a random symmetric solution of the TV-ARE under IC2. This means that different symmetric TV-ARE solutions are produced from the HOZNN model for different ICs. The EME convergence of the HOZNN models is depicted in
Figure 1a,c for the NE
Section 4.1, and
Figure 1e,g for the NE
Section 4.2. In all of these figures, we observe that the EME of the HOZNN models convergence begins at
with values in the range
, but it ends before
with lowest values in the range
. That is, the EME of the HOZNN models begins from a non-optimal IC and convergence to the zero matrix. Additionally,
Figure 1a,c,e,g illustrate that the convergence occurs more quickly the higher the value of the parameter
p. In other words, for
the HOZNN model converges more quickly than for
, and for
, the HOZNN model converges more quickly than for
in NE
Section 4.1. Furthermore, for
, the HOZNN model converges more quickly than for
, and for
, the HOZNN model converges more quickly than for
in NE
Section 4.2. The graphs in
Figure 1b,d,f,h behave in the same way due to the convergence tendency of the EME convergence of the HOZNN models. In other words, the solution trajectories associated with the HOZNN models in these figures begin at
in a very different value from the objective and reach it before
. As a result, it is evident that Theorem 2 is proven true since we assume that
are differentiable and
,
are non-negative definite and symmetric matrices.
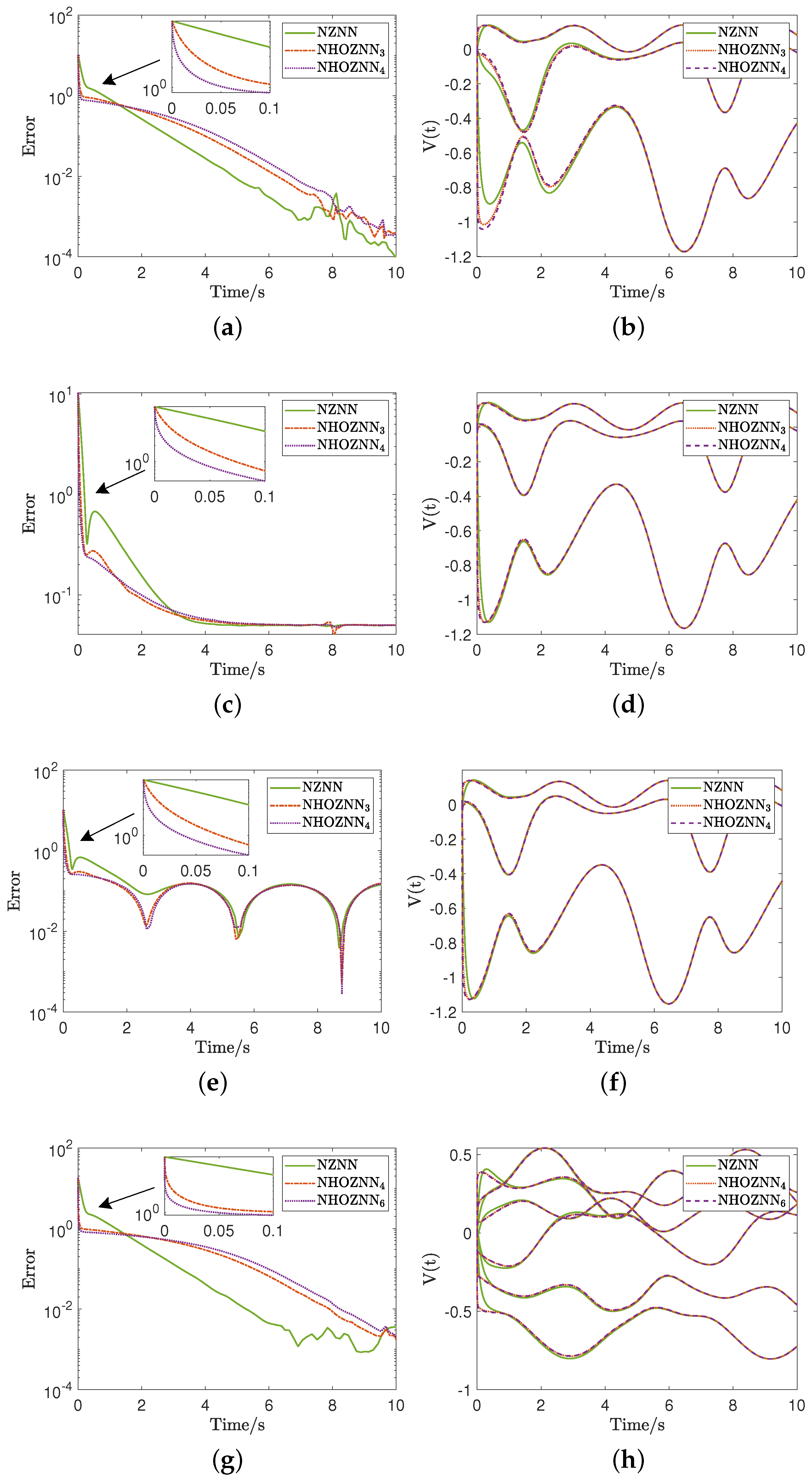
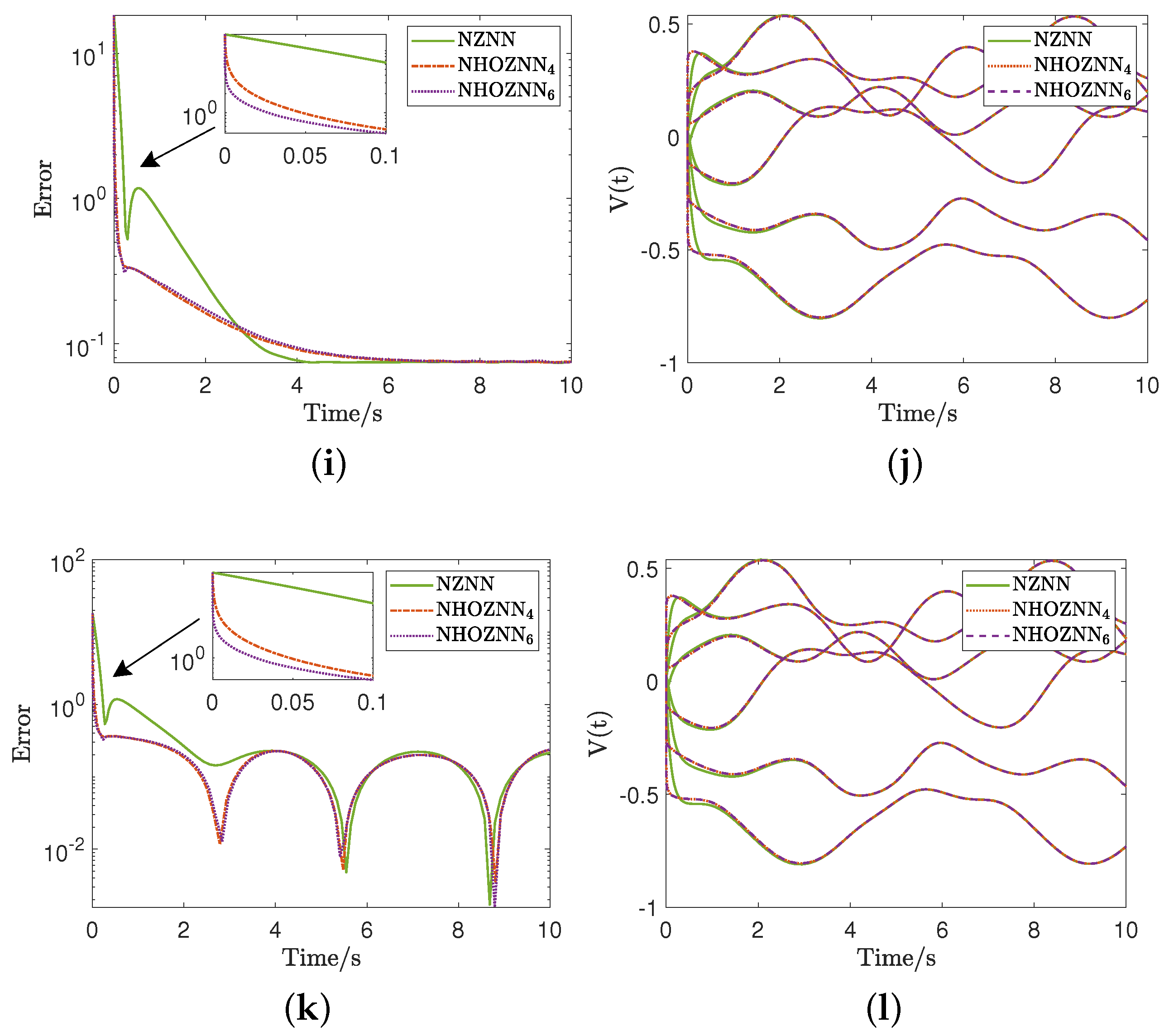
In the case of the NHOZNN model, the findings are presented in
Figure 2. As can be observed in
Figure 2b,d,f,h,j,l, the NHOZNN model produces a random symmetric solution to the TV-ARE of NEs
Section 4.1 and
Section 4.2 under IC2 with three different types of noise, CN, LN, and BRN. Further,
Figure 2a,c,e,g,i,k show that for every type of noise that was utilized, the NHOZNN model converges to the TV-ARE solution. Particularly, we observe that the EME of the NHOZNN models convergence begins at
with values in the range
and, at
, takes values in the range
. Until
, the EME of the NHOZNN models values continue to drop, with lowest values in the range
. That is, the EME of the NHOZNN models begin from a non-optimal IC and convergence to the zero matrix. Notice also in these figures that the convergence occurs more quickly as the parameter
p increases in value. The graphs in
Figure 2b,d,f,h,j,l behave in the same way due to the convergence tendency of the EME convergence of the NHOZNN models under three different types of noise, CN, LN, and BRN. In other words, the solutions trajectories associated with the NHOZNN models in these figures begin at
in a very different value from the objective and continue to drop until
under three different types of noise. As a result, it is evident that Theorem 6 is proven true since we assume that
are differentiable and
,
are non-negative definite and symmetric matrices.
The following is deduced from the NEs of this section. As the parameter p increases in value, the HOZNN and NHOZNN models perform better at solving the TV-ARE than the traditional ZNN and NZNN models, i.e., HOZNN and NHOZNN with . In other words, the HOZNN and NHOZNN models provide the smallest Frobenius norm for the EMEs when the parameter p increases in value. It is also important to note that the models will converge more quickly the larger the value of the design parameter . In essence, the HOZNN and NHOZNN models outperform the traditional ZNN and NZNN models, respectively, in solving the TV-ARE.


 ,
, 

{kind=link}
{kind=link}
{kind=link}


