
Design and Analysis of Novel Non-Involute Cylindrical Gears with a Curved Path of Contact

Abstract
:1. Introduction
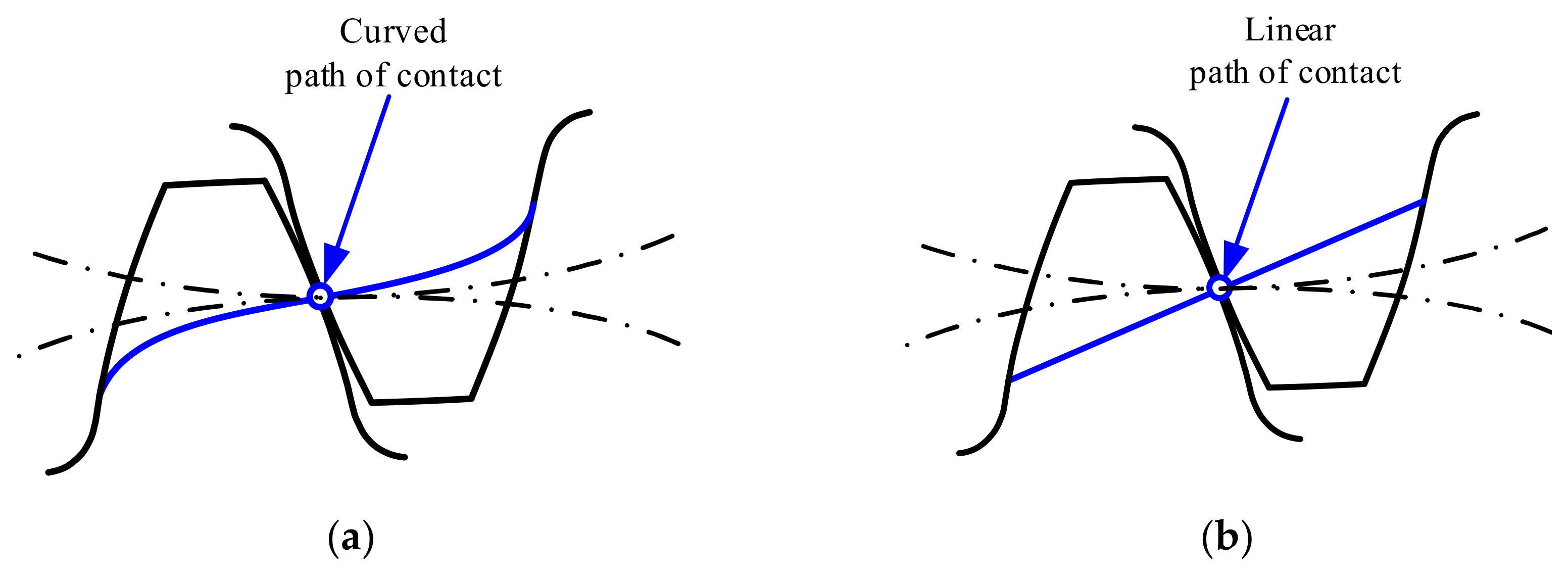
2. Designation of the Tooth Profiles Based on a Curved Path of Contact
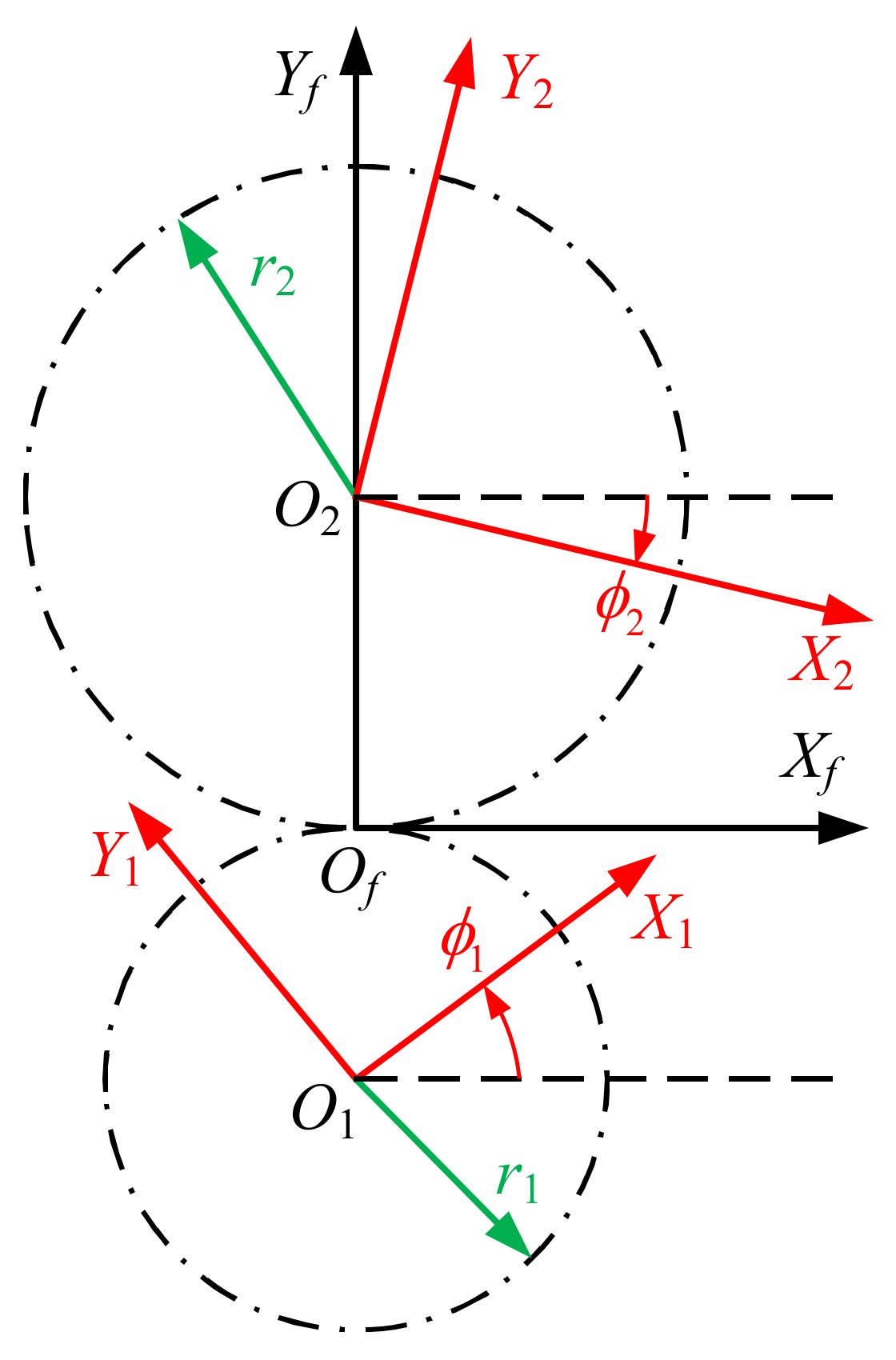
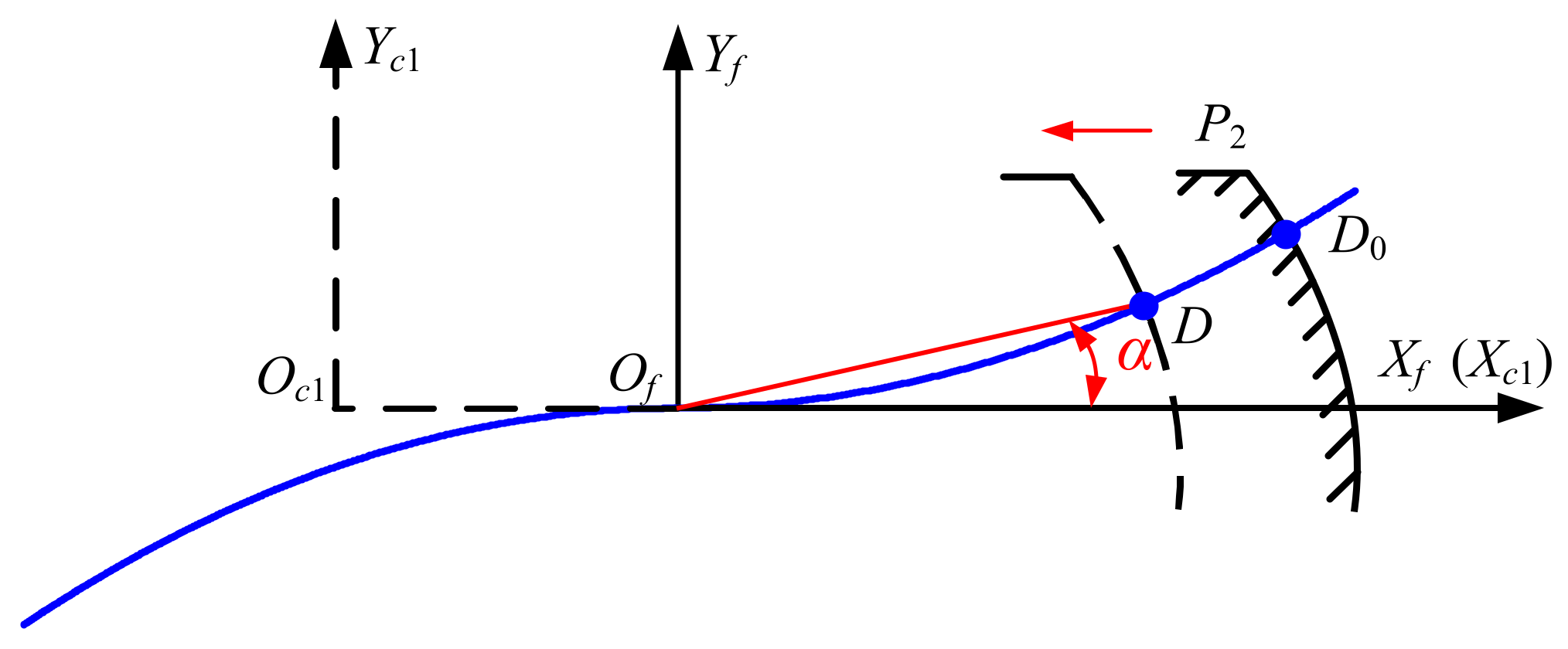
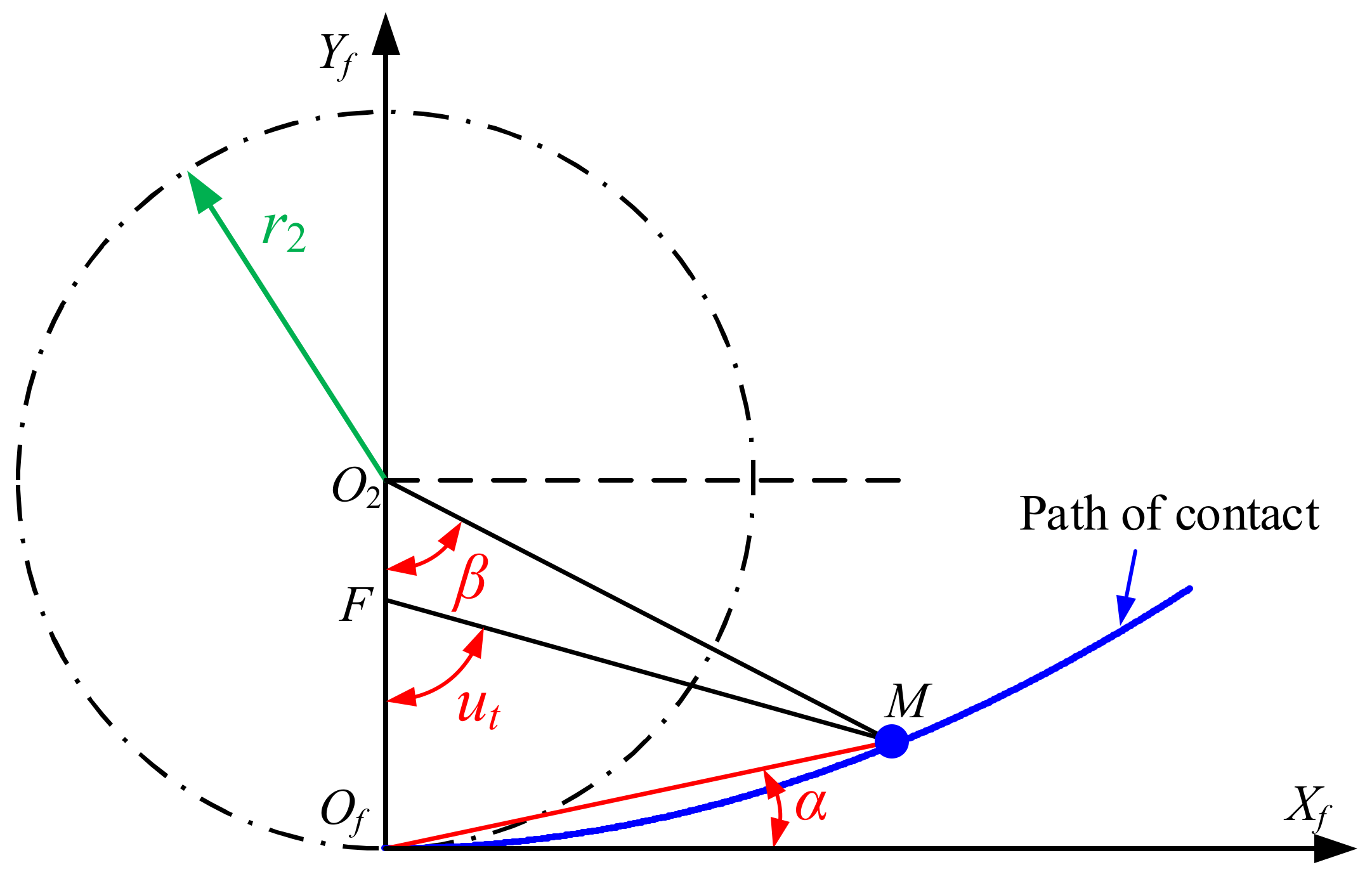
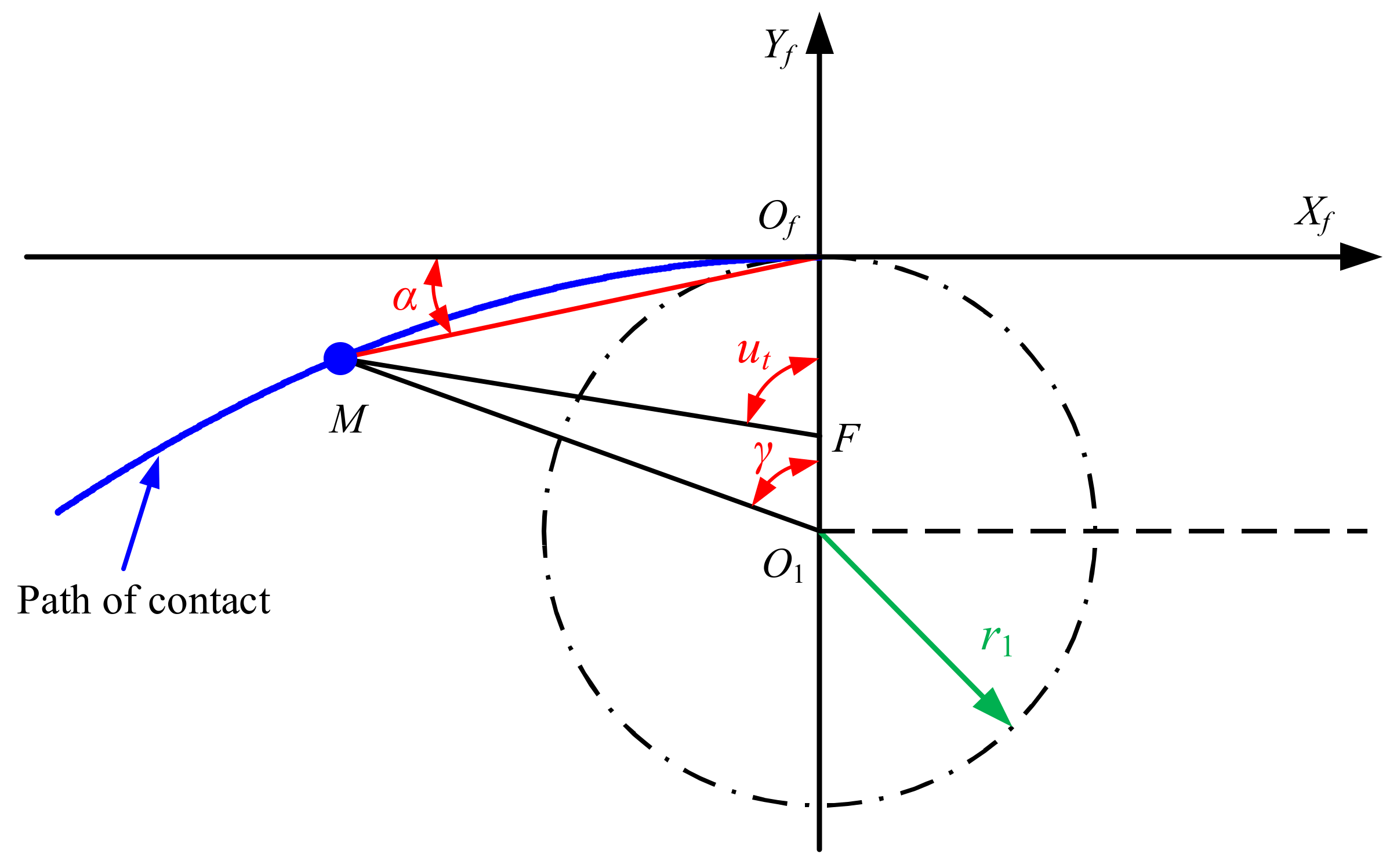
2.1. Mathematical Model of the Tooth Profiles Based on Path of Contact
2.2. Checking Tooth Undercutting
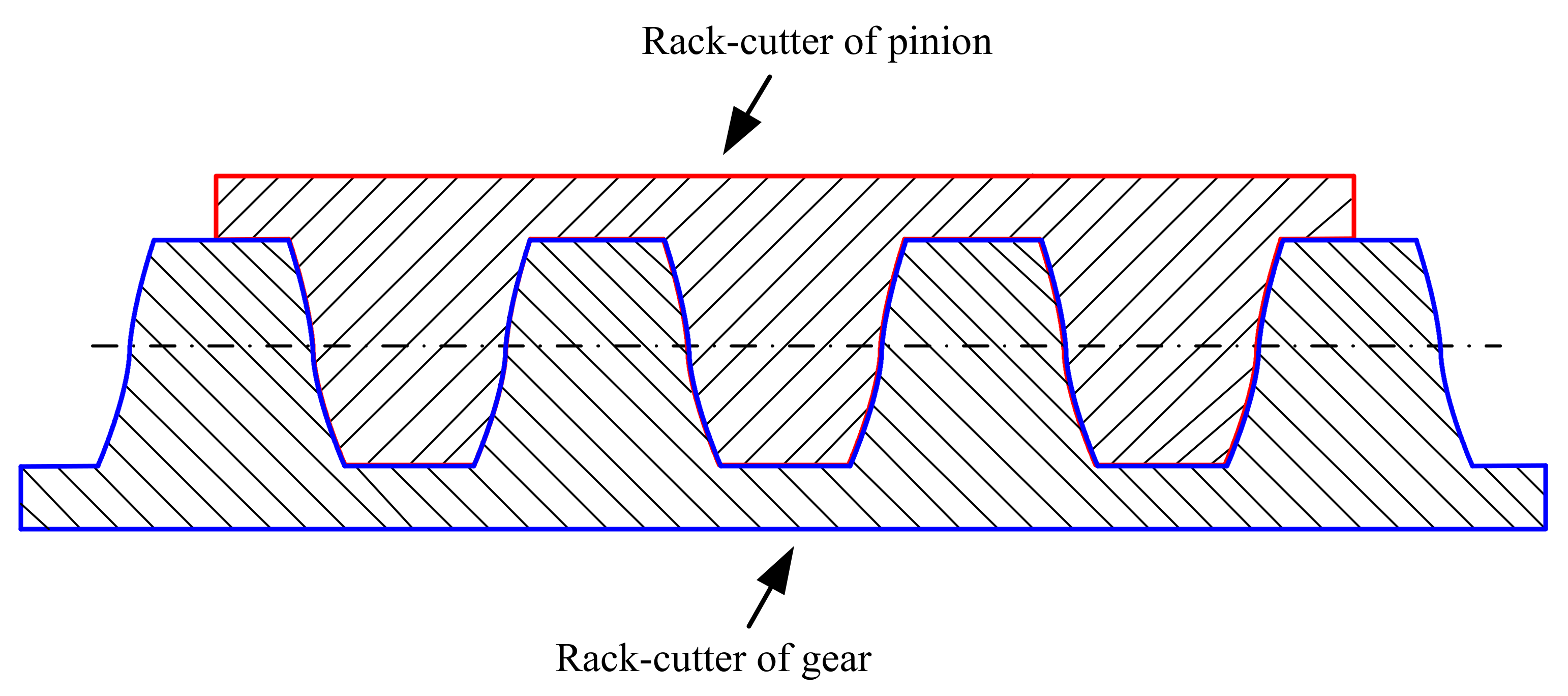
2.3. Determination of the Rack-Cutter Tooth Profile
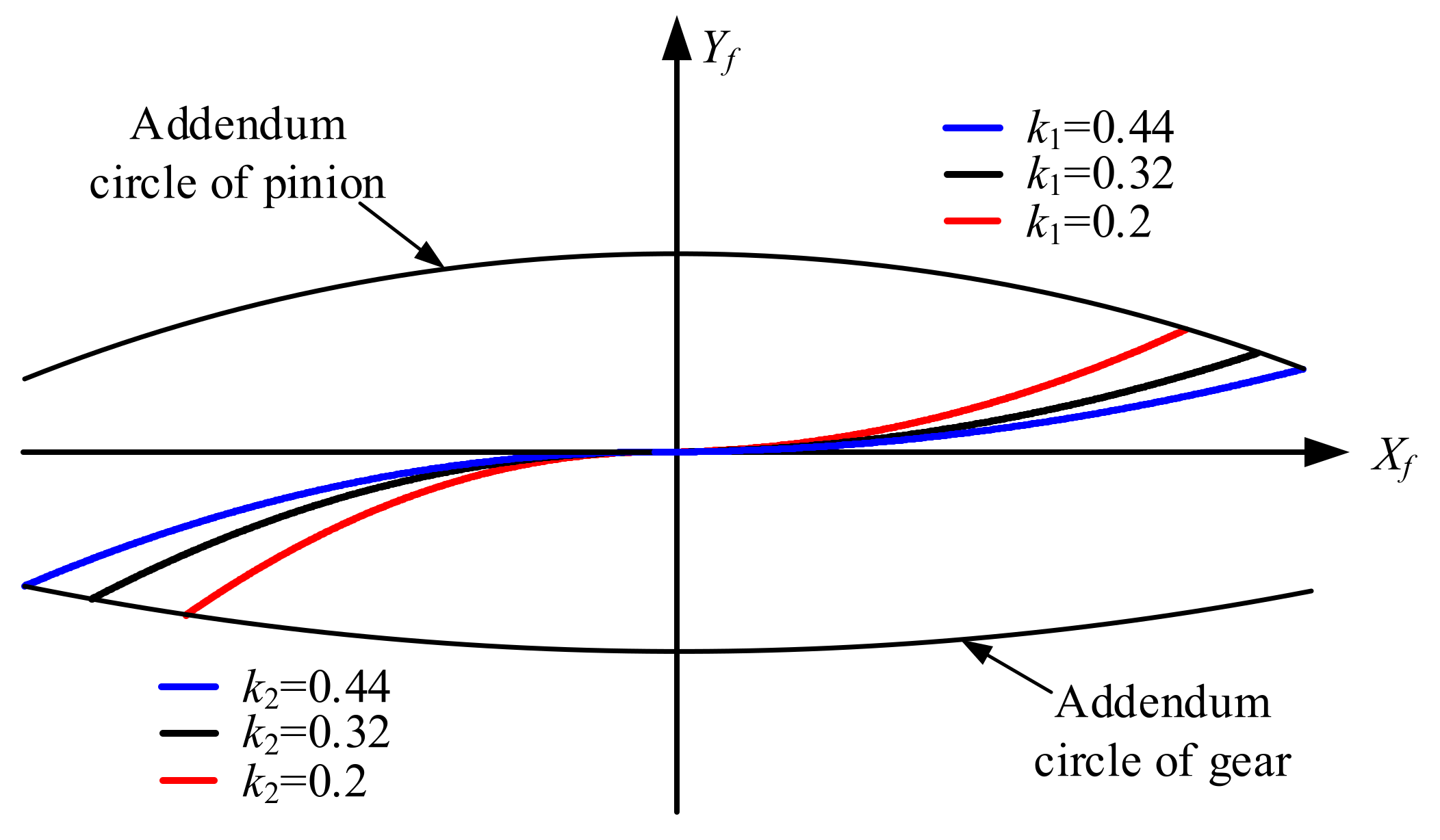
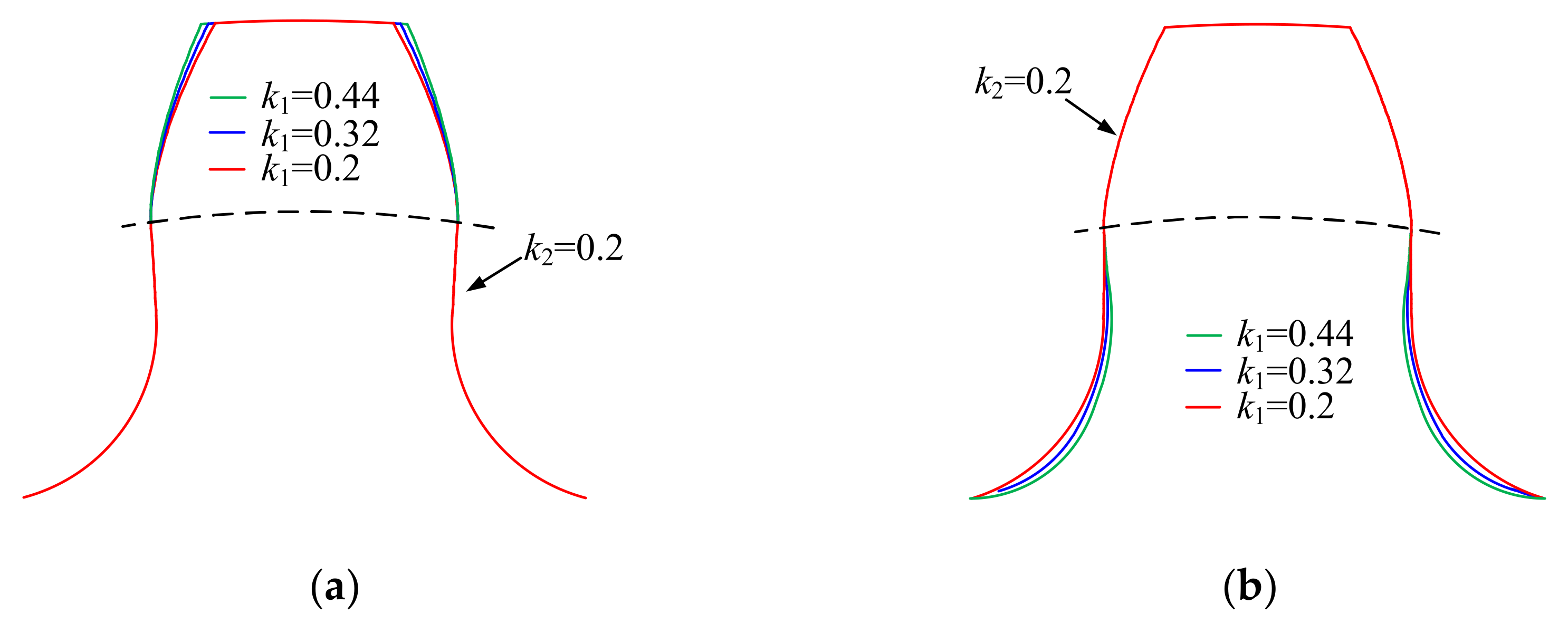
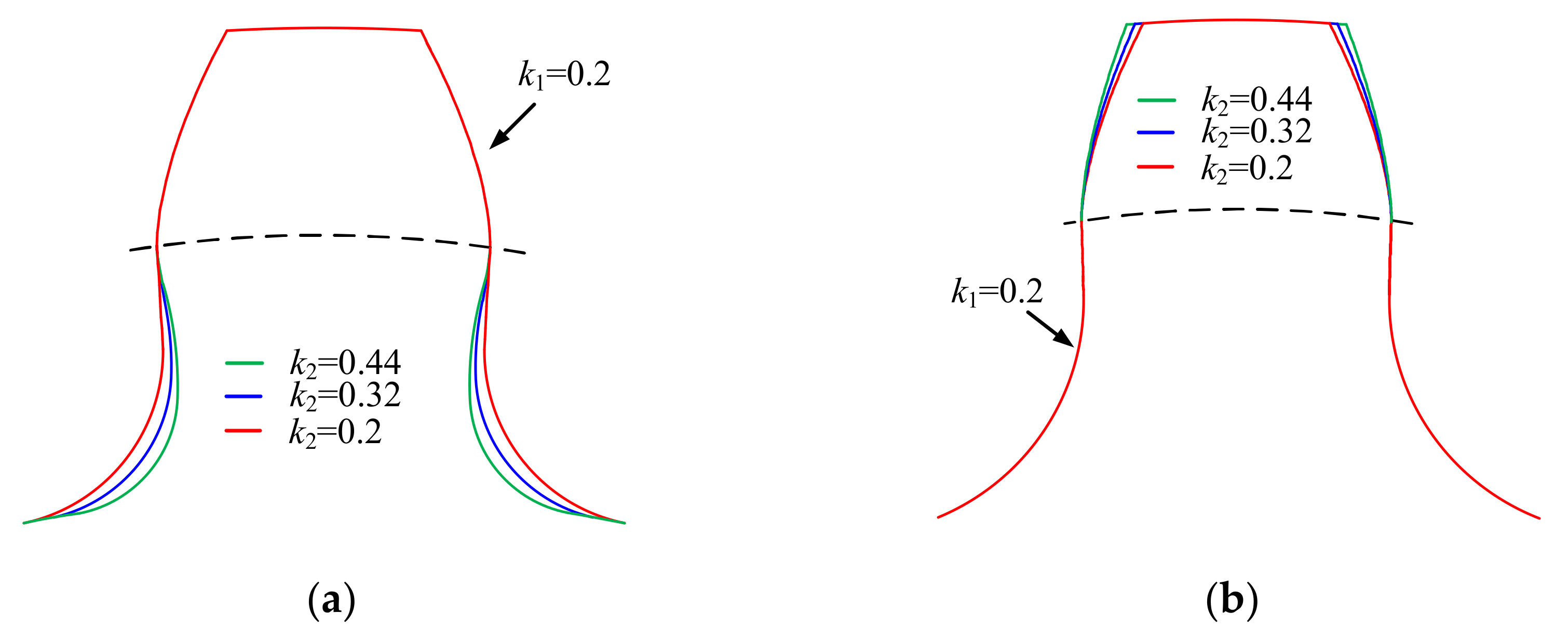
2.4. Design of Tooth Profiles Based on Parabolic Path of Contact
3. Error-Sensitivity Analysis and Tooth Modification
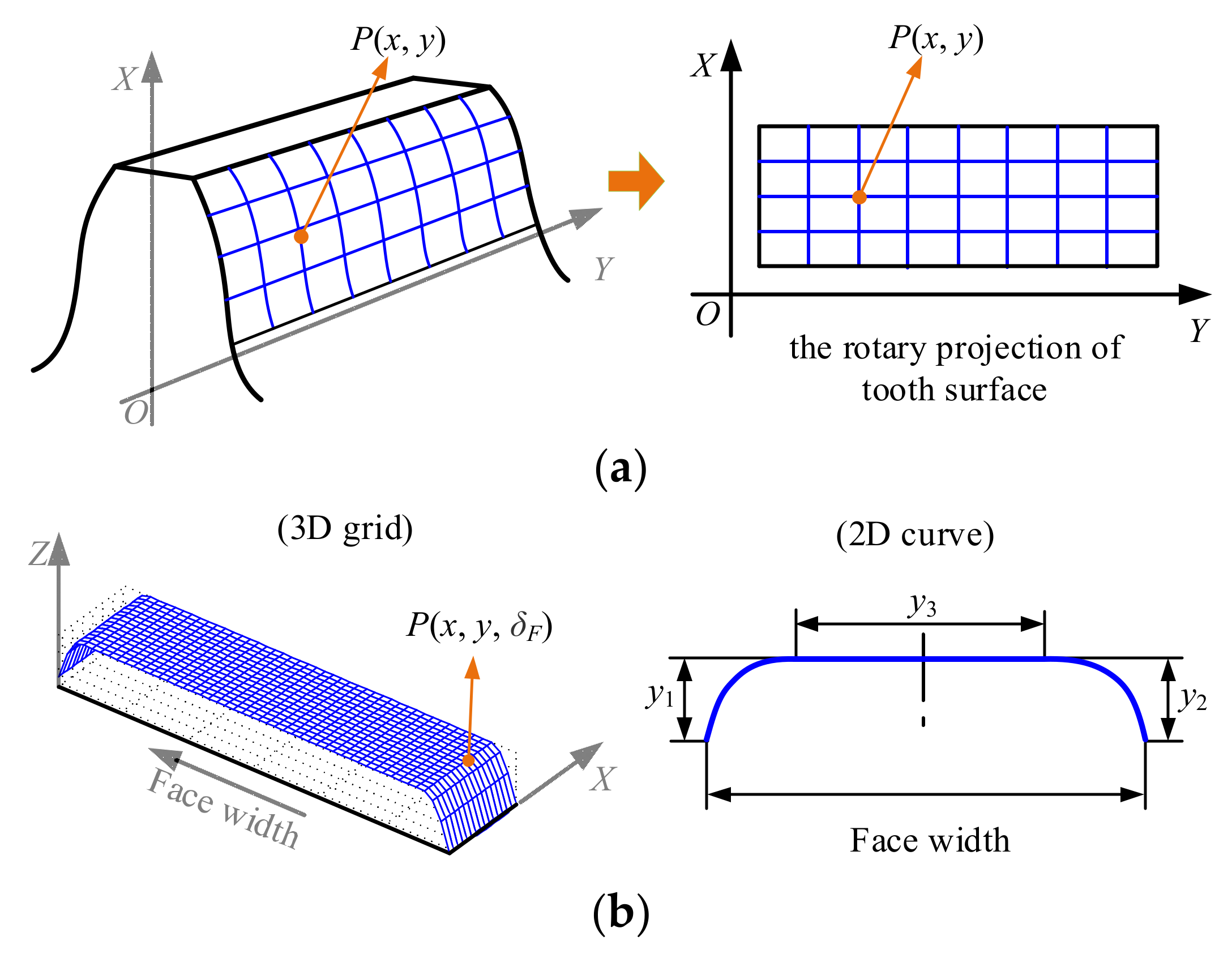
3.1. Three-Dimensional (3D) Grid Modeling of the Novel Gear with Tooth Modification
- (1)
- The coordinates of the instantaneous cutting points of the rack-cutter from entering engagement to exiting engagement were solved by using gear meshing theory.
- (2)
- The plane node coordinates of the tooth profiles on both sides of the tooth were determined by rotating projection transformation.
- (3)
- Similarly, the plane node coordinates of the gear tooth base can also be obtained by rotating projection transformation.
- (4)
- All the spatial joint coordinates of a gear tooth were calculated based on the plane node coordinates using coordinate transformation along the longitudinal direction.
- (5)
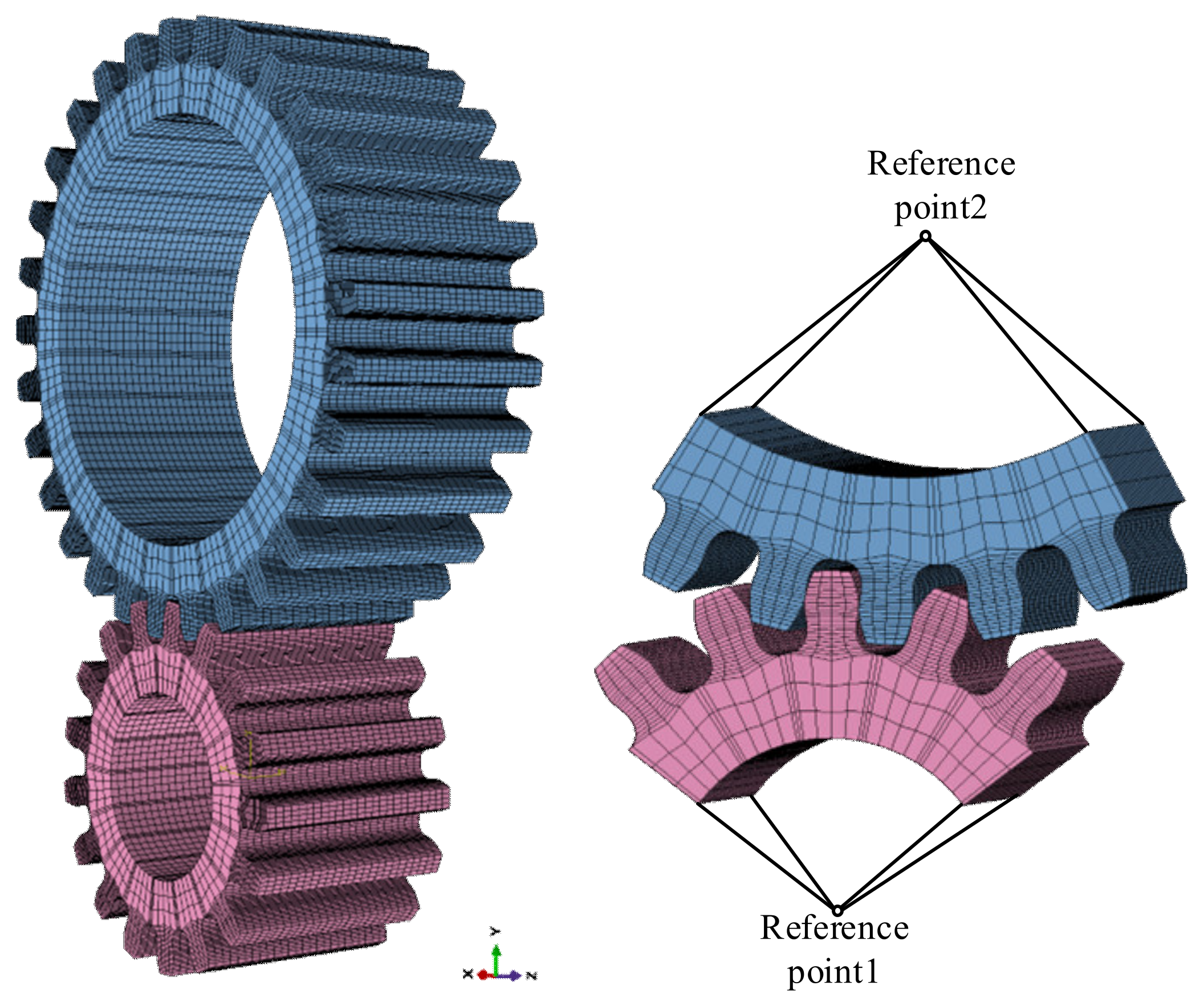
- The calculated node coordinate file was imported into ABAQUS to realize rapid 3D modeling of the novel gear.
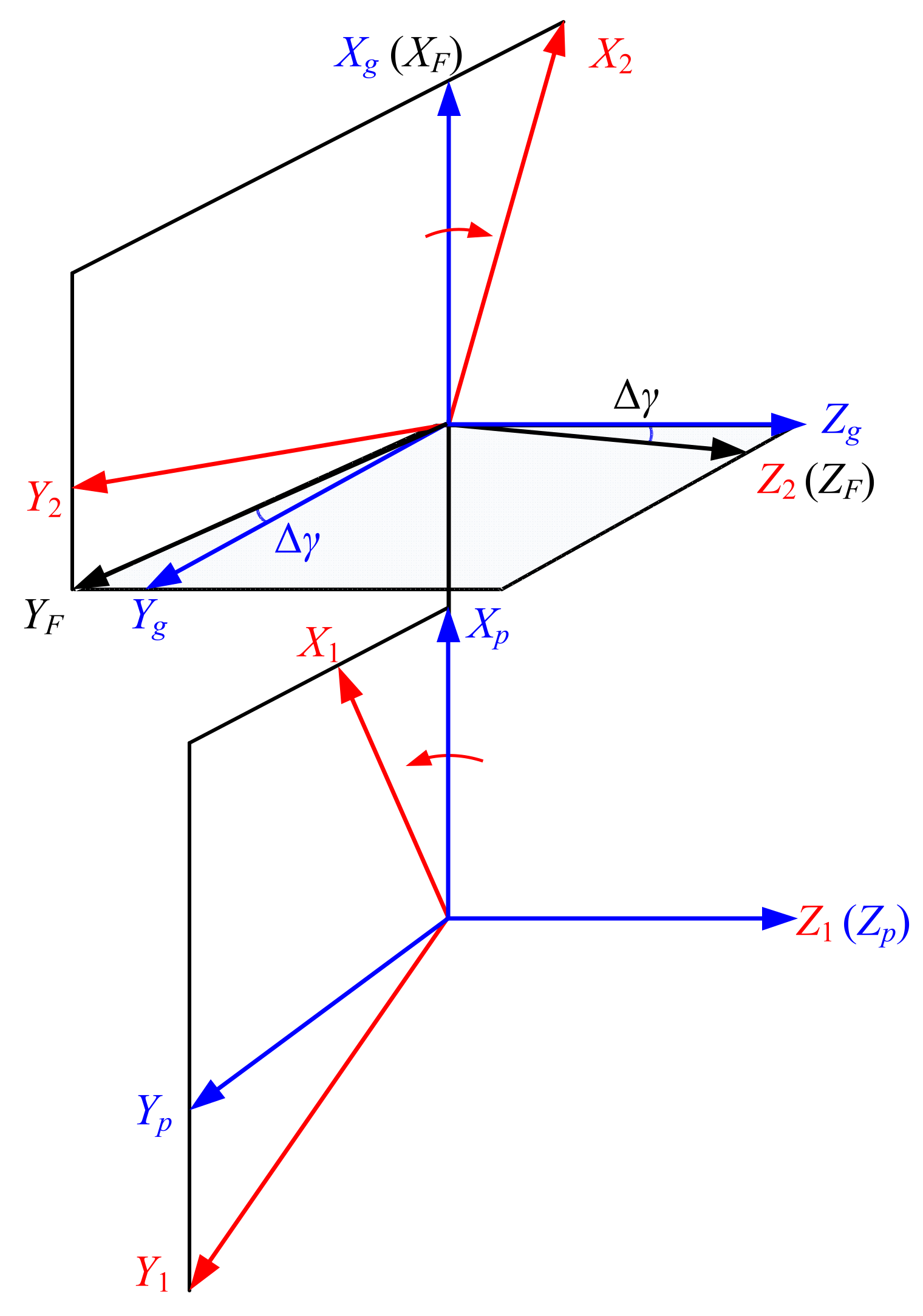
3.2. Error-Sensitivity Analysis
4. Results
4.1. Design of the Novel Gears
4.2. Loaded-Tooth Contact Analysis of the Novel Gears
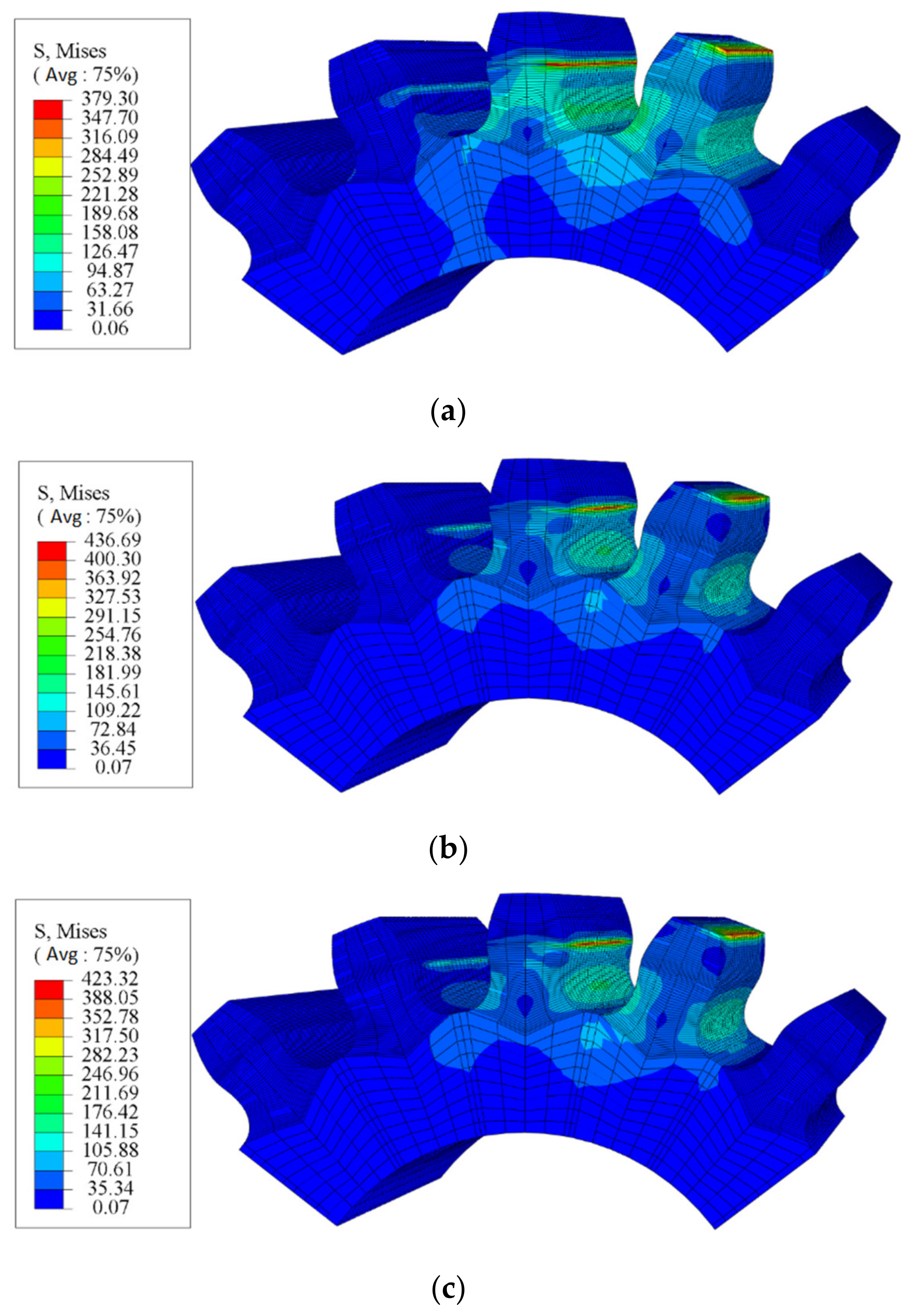
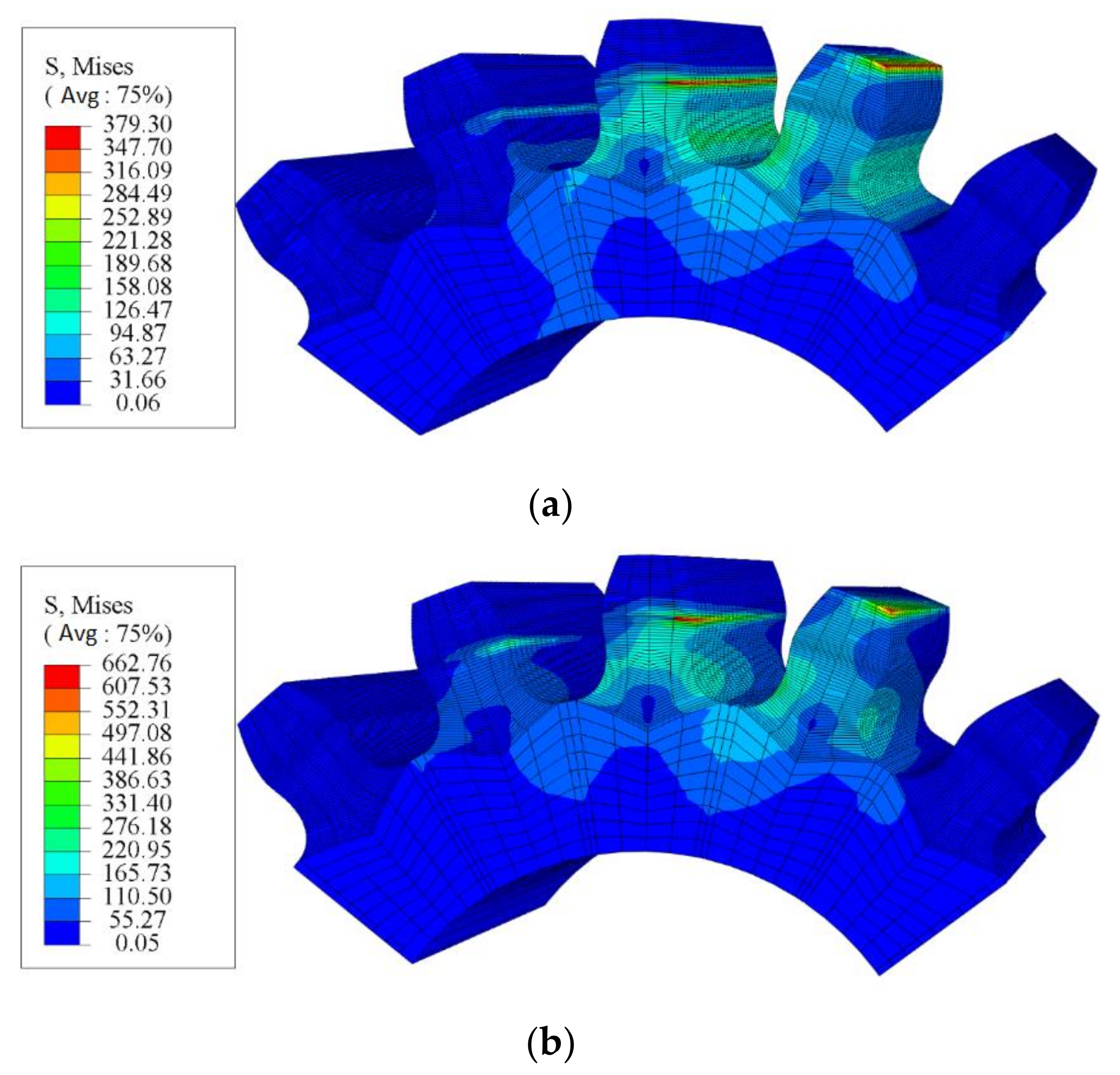
4.2.1. Verification of Finite Element Calculation Accuracy
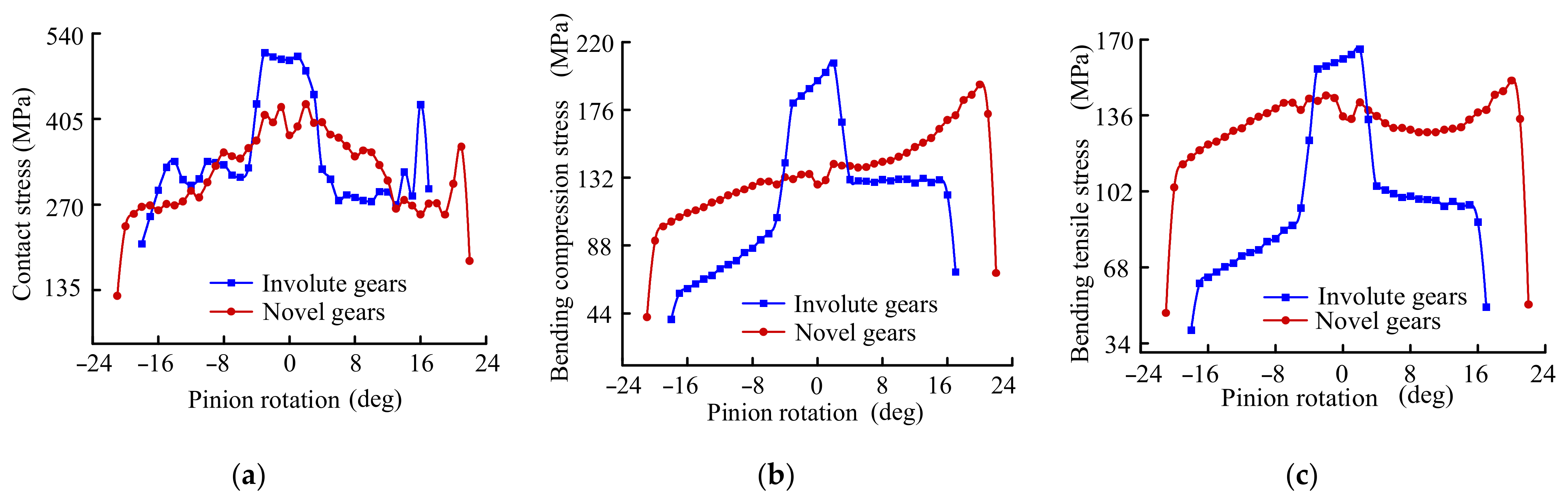
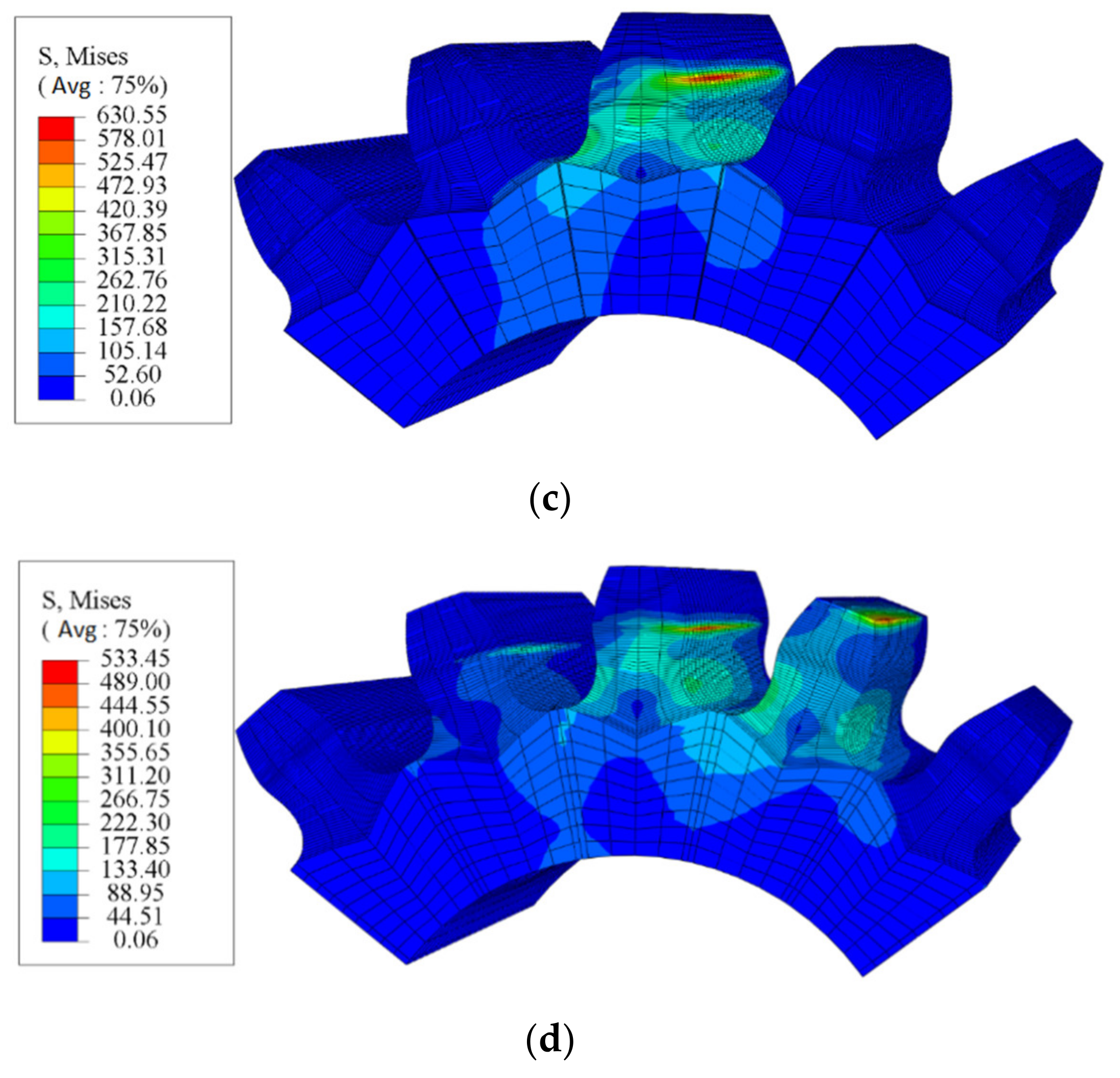
4.2.2. Load-Carrying Capacity Verification of the Novel Gears
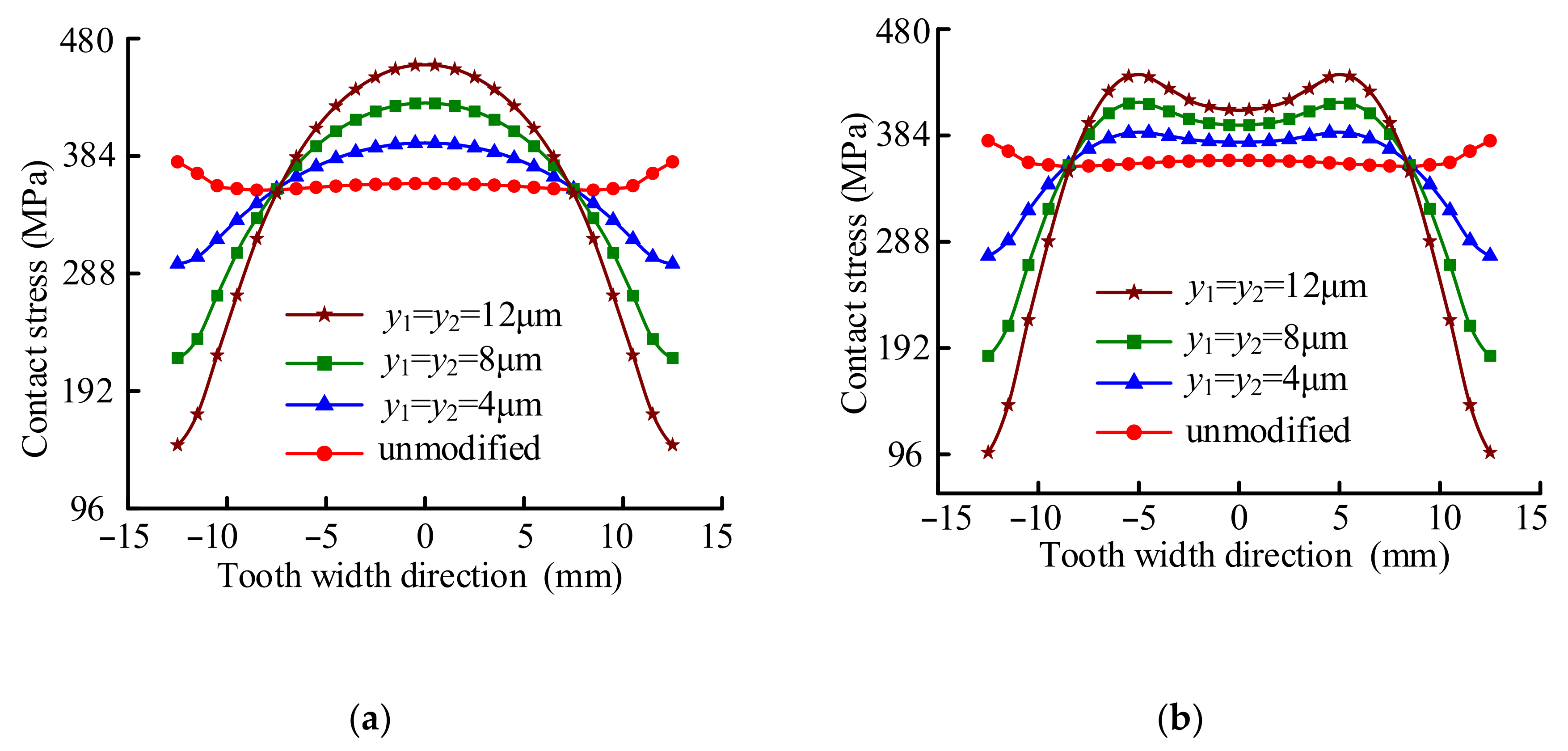
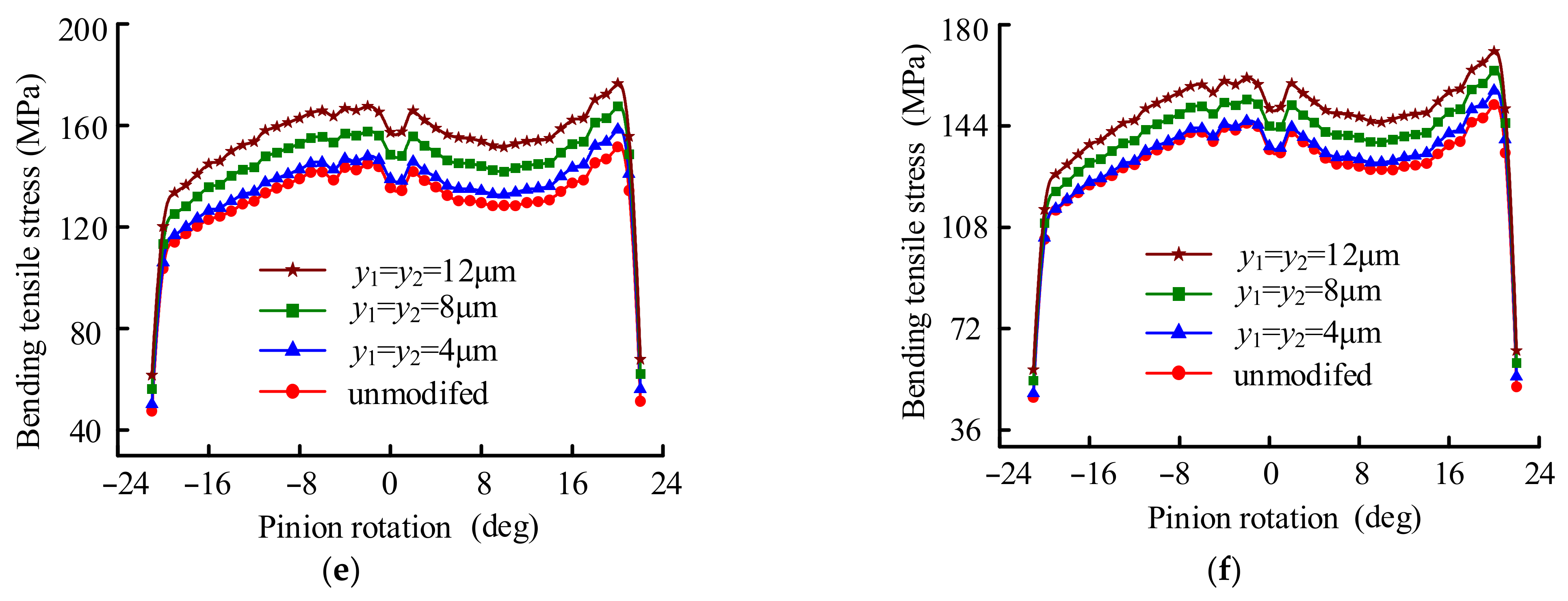
4.2.3. Tooth Modification of the Novel Gears
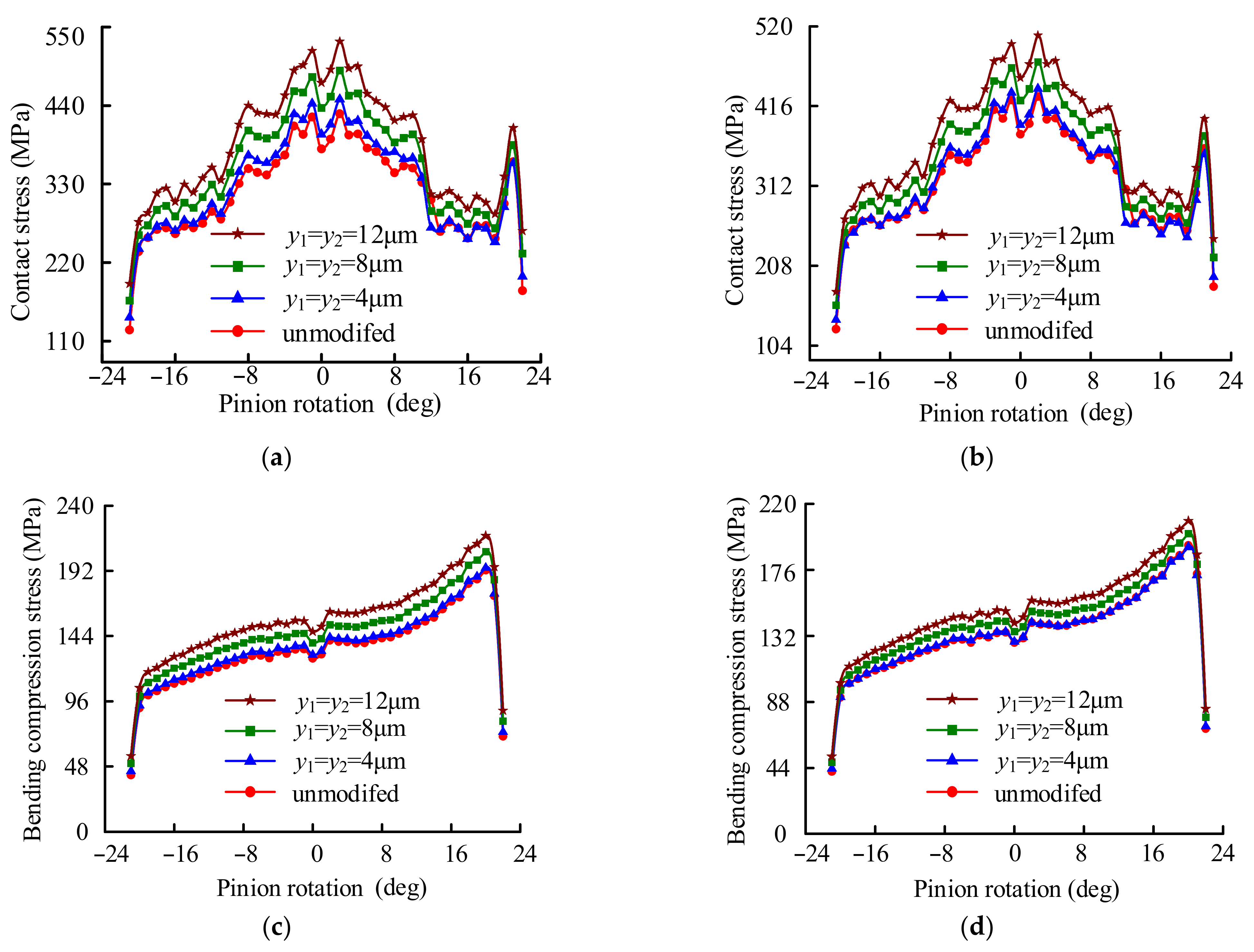
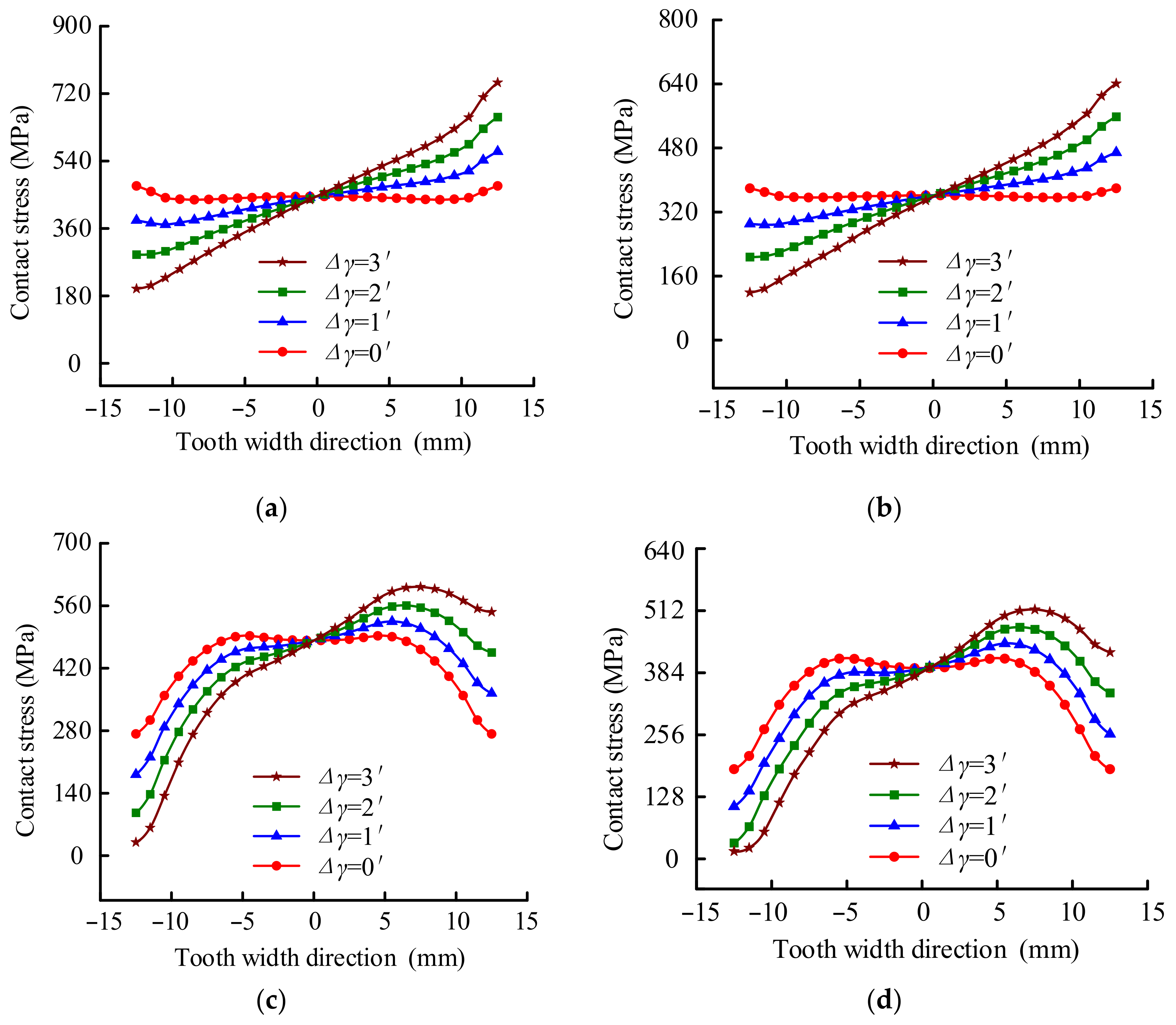
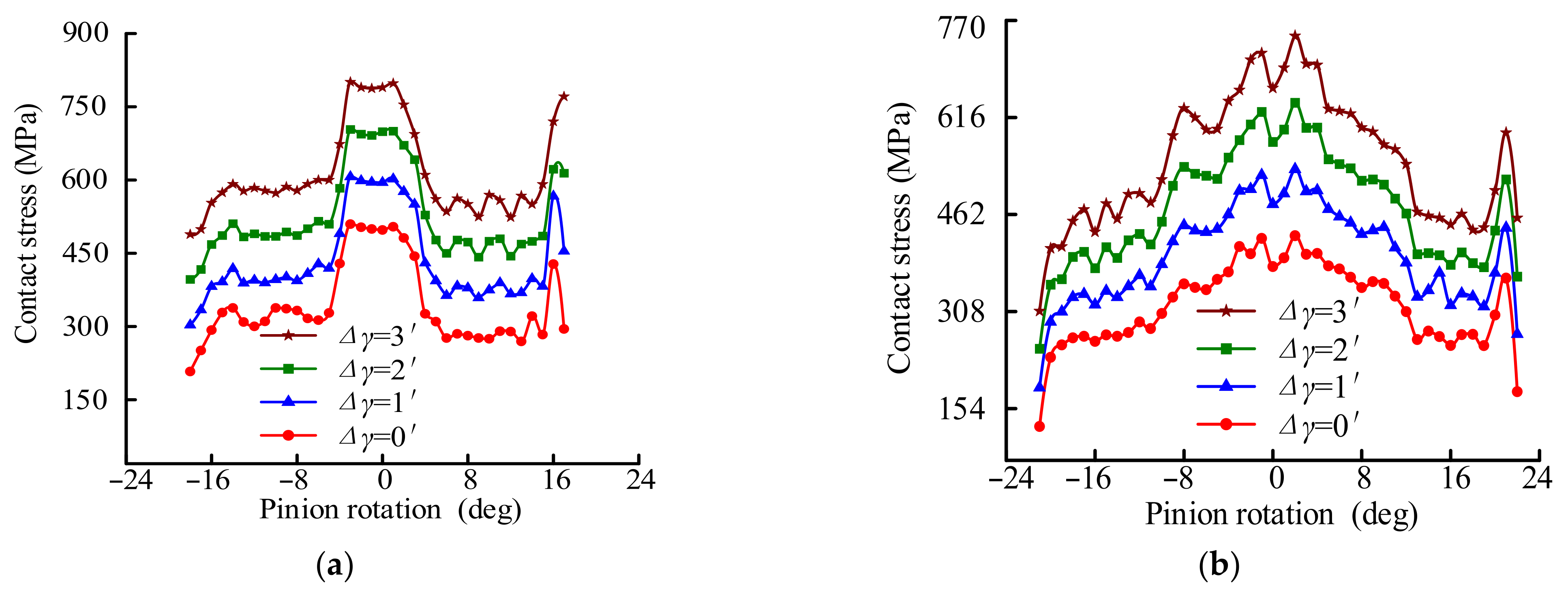
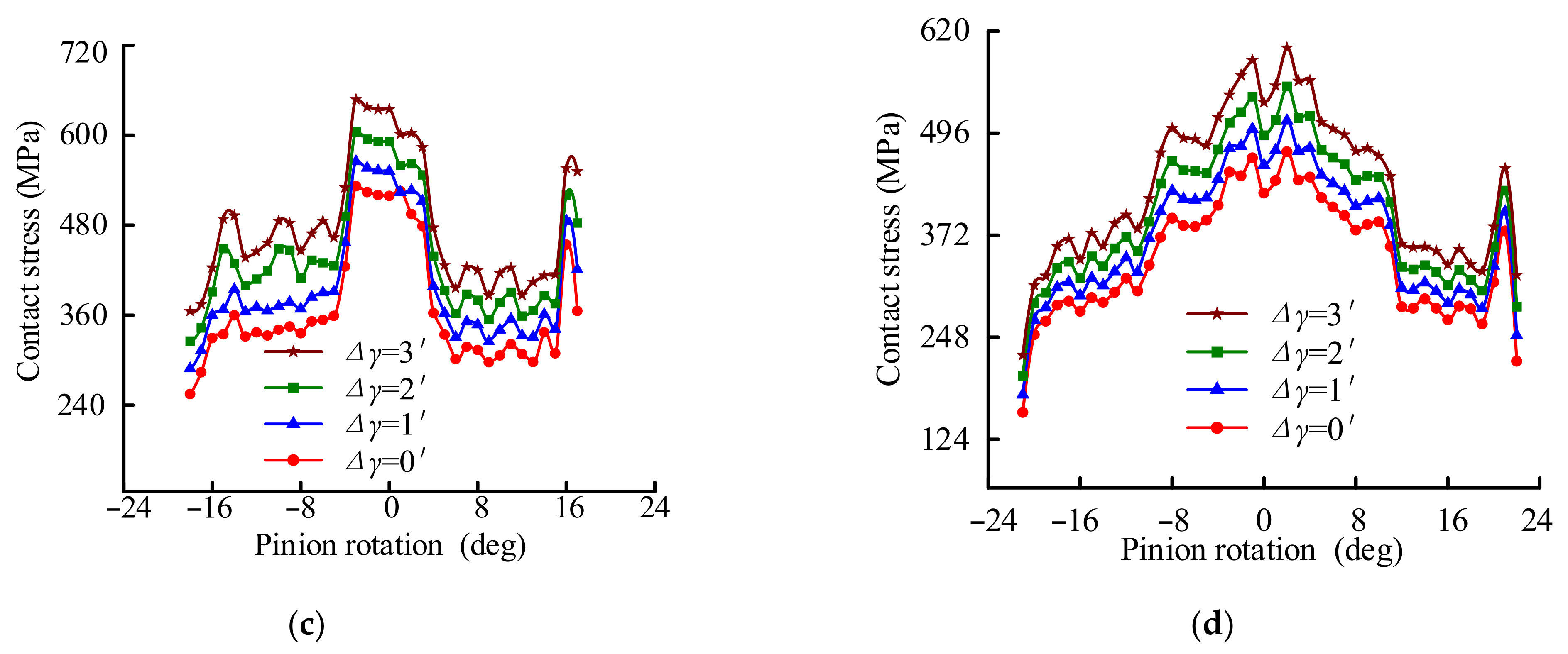
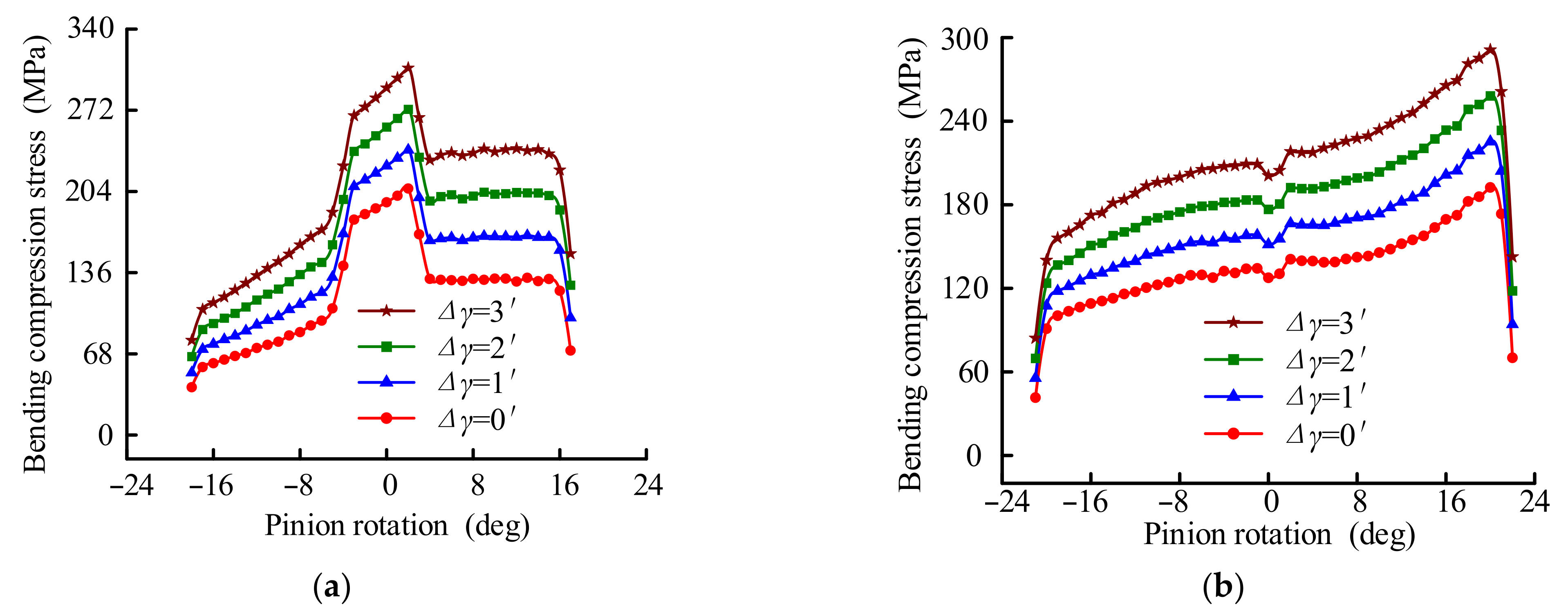
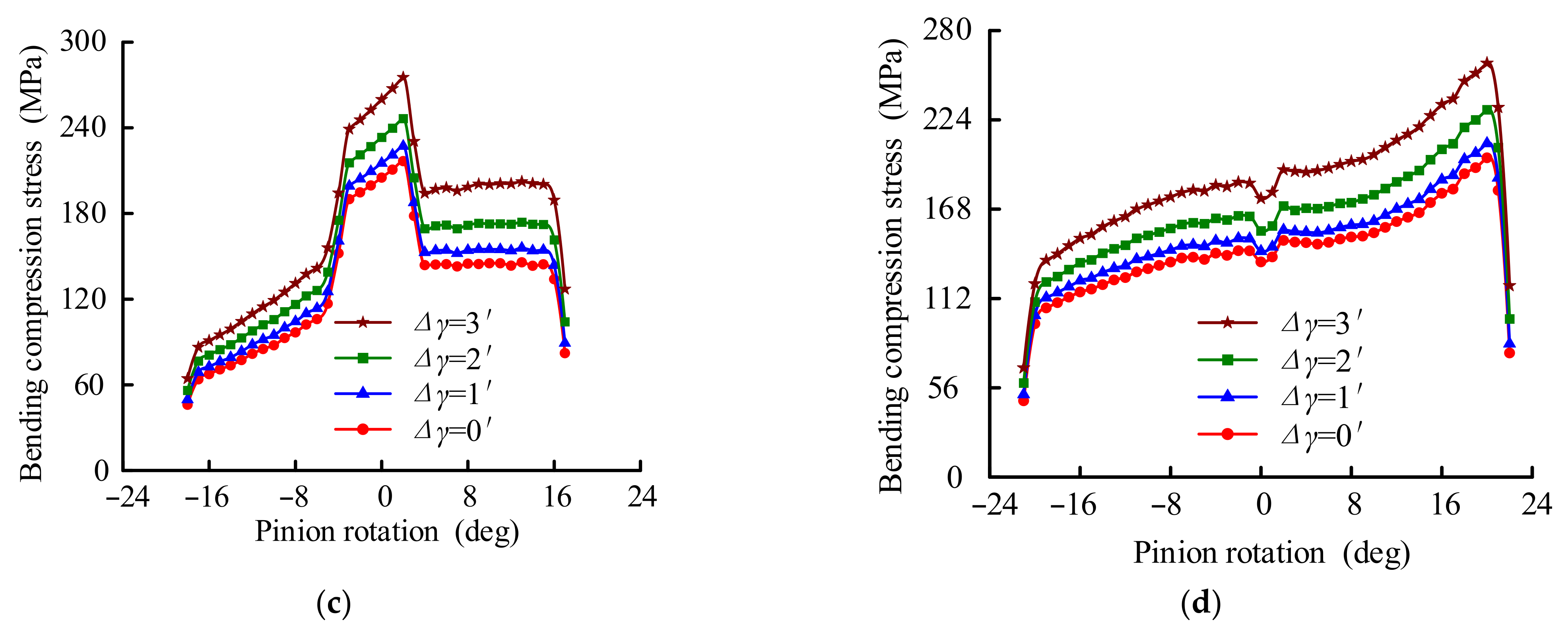
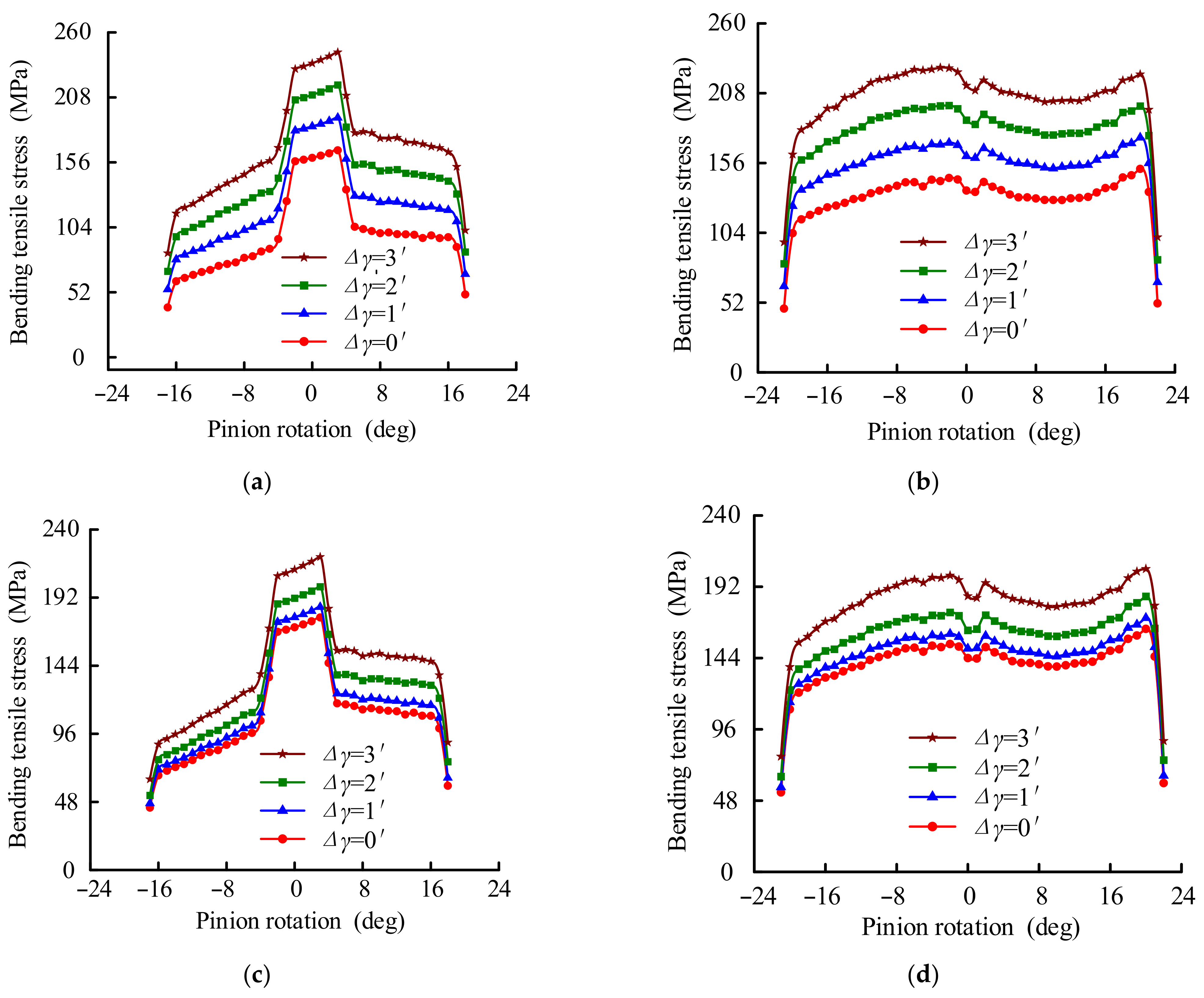
4.2.4. Error-Sensitivity Analysis of the Novel Gears
5. Conclusions
- (1)
- Compared with the involute gear, the tooth contact stress of the presented novel gear is reduced by 16.10%. The presented novel gear is helpful in reducing tooth surface wear.
- (2)
- The presented novel gear has higher load capacity than the involute gear. Whether it is modified or not, with or without misalignment error, the calculated stress of the presented novel gear is lower than that of the involute gear.
- (3)
- Tooth modification has a great influence on the performance of the novel gear. When the misalignment error is 3′, after tooth modification, the contact stress, bending compressive stress, and bending tensile stress of the novel gear are reduced by 19.54%, 10.85%, and 10.14%, respectively.
- (4)
- Change in the design parameters leads to a change in the tooth profile of the presented novel gears and the change of the dedicated rack-cutters. Considering the processing problem, the cost of the presented novel gear will be higher than for an involute gear.
- (5)
- Small-batch production of the presented novel gears can be realized based on the dedicated rack-cutter. The presented novel gears processed by the same type of dedicated rack-cutter can be interchanged.
- (6)
- The presented novel gear in this paper is not mature in some respects, but it has great advantages over the involute gear in others, especially high contact strength. The presented gear has potential application prospects in high-power roadheaders and tunnelling machines.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| ut | parameter of the predesigned line of contact path |
| ri | the pitch circle radius of the pinion and gear (i = 1, 2) |
| rotation angle of pinion and gear (i = 1, 2) | |
| m12 | gear transmission ratio |
| Ni | tooth number of pinion and gear (i = 1, 2) |
| , | position vector and unit normal vector of surface (i = 1, 2) |
| Si | coordinate system i (i = 1, 2, f, p, g) |
| [L]i,j | coordinate transmission matrix (from Sj to Si) |
| sliding velocity of contact point on tooth profile of pinion and gear | |
| k1, k2 | parabolic coefficients |
| y1, y2, y3 | parameters of tooth longitudinal modification |
| δF | modified value of the grid node |
| Δγ | misalignment error |
| σc | maximum contact stress |
| σbc | maximum bending compressive stress |
| σbt | maximum bending tensile stress |
References
- Yeh, T.; Yang, D.C.H.; Tong, S.H. Design of new tooth profiles for high-load capacity gears. Mech. Mach. Theory 2001, 36, 1105–1120. [Google Scholar] [CrossRef]
- Sun, Q.; Sun, Y.H. The generation principle, mathematical models of variable involute, and its application. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2018, 232, 828–841. [Google Scholar] [CrossRef]
- Hsieh, C.F.; Fuentes-Aznar, A. Performance prediction method of cycloidal speed reducers. J. Braz. Soc. Mech. Sci. 2019, 41, 186. [Google Scholar] [CrossRef]
- Chen, Z.; Zeng, M.; Fuentes-Aznar, A. Computerized design, simulation of meshing and stress analysis of pure rolling cylindrical helical gear drives with variable helix angle. Mech. Mach. Theory 2020, 153, 103962. [Google Scholar] [CrossRef]
- Hussein, A.W.; Abdullah, M.Q. A novel design for enhancing the surface durability of the spur gear systems. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2022, 236, 10143–10160. [Google Scholar] [CrossRef]
- Liu, C.Z.; Qin, D.T.; Liao, Y.H. Dynamic model of variable speed process for herringbone gears including friction calculated by variable friction coefficient. J. Mech. Des. 2014, 136, 041006. [Google Scholar] [CrossRef]
- Chapron, M.; Velex, P.; Bruyère, J.; Becquerelle, S. Optimization of profile modifications with regard to dynamic tooth loads in single and double-helical planetary gears with flexible ring-gears. J. Mech. Des. 2016, 138, 023301. [Google Scholar] [CrossRef]
- Marimuthu, P.; Muthuveerappan, G. Investigation of load carrying capacity of asymmetric high contact ratio spur gear based on load sharing using direct gear design approach. Mech. Mach. Theory 2016, 96, 52–74. [Google Scholar] [CrossRef]
- Sekar, R.P. Determination of load dependent gear loss factor on asymmetric spur gear. Mech. Mach. Theory 2019, 135, 322–335. [Google Scholar] [CrossRef]
- Wang, J.; Luo, S.M.; Su, D.Y.; Chang, X.F. Geometric design and simulation of tooth profile using elliptical segments as its line of action. J. Cent. South Univ. 2015, 22, 2119–2126. [Google Scholar] [CrossRef]
- Lu, F.X.; Cao, X.C.; Liu, W.P. Optimal design of high efficiency double helical gear based on dynamics model. SN Appl. Sci. 2021, 3, 13. [Google Scholar] [CrossRef]
- Litvin, F.L.; Lu, J. Computerized design and generation of double circular-arc helical gears with low transmission errors. Comput. Method Appl. Mech. Eng. 1995, 127, 57–86. [Google Scholar] [CrossRef]
- Zhang, H.; Hua, L.; Han, X.H. Computerized design and simulation of meshing of modified double circular-arc helical gears by tooth end relief with helix. Mech. Mach. Theory 2010, 45, 46–64. [Google Scholar] [CrossRef]
- Yao, L.G.; Gu, B.; Huang, S.J.; Wei, G. Mathematical modeling and simulation of the external and internal double circular-arc spiral bevel gears for the nutation drive. J. Mech. Des. 2010, 132, 021008. [Google Scholar] [CrossRef]
- Wen, L.; Chen, Z.; Fuentes, A. Computerized design, simulation of meshing and stress analysis of non-generated double circular-arc helical gear drives with different combinations of transverse pressure angle. Mech. Mach. Theory 2022, 170, 104683. [Google Scholar] [CrossRef]
- Song, C.S.; Li, X.Z.; Yang, Y.; Sun, J. Parameter design of double-circular-arc tooth profile and its influence on meshing characteristics of harmonic drive. Mech. Mach. Theory 2022, 167, 104567. [Google Scholar] [CrossRef]
- Su, Y.J.; Yao, L.G.; Zhang, J. Contact dynamics analysis of nutation drive with double circular-arc spiral bevel gear based on mathematical modeling and numerical simulation. Mech. Sci. 2021, 12, 185–192. [Google Scholar] [CrossRef]
- Jiang, B.; Ren, Z.; Duan, J. Research of the load distribution at the meshing point of double circular arc gear. J. Mech. Transm. 2017, 41, 58–61. [Google Scholar]
- Lu, J.; Litvin, F.L.; Chen, J.S. Load share and finite-element stress-analysis for double circular-arc helical gears. Math. Comput. Model. 1995, 21, 13–30. [Google Scholar] [CrossRef]
- Qu, W.T.; Peng, X.Q.; Zhao, N.; Guo, H. Finite element generalized tooth contact analysis of double circular arc helical gears. Struct. Eng. Mech. 2012, 43, 439–448. [Google Scholar] [CrossRef]
- Liu, X.; Wu, F.; Wang, L. Research of quasi transverse double circular-arc gear sensitivity in centre distance error. J. Mech. Transm. 2012, 36, 28–31. [Google Scholar]
- Luo, S.M.; Wu, Y.; Wang, J. The generation principle and mathematical models of a novel cosine gear drive. Mech. Mach. Theory 2008, 43, 1543–1556. [Google Scholar] [CrossRef]
- Koide, T.; Yukawa, T.; Takami, S.; Ueda, A.; Moriwaki, I.; Tamura, A.; Hongu, J. Tooth surface temperature and power transmission efficiency of plastic sine-curve gear. J. Adv. Mech. Des. Syst. 2017, 11, 6. [Google Scholar]
- Wang, J.; Hou, L.; Luo, S.M.; Wu, R.Y. Active design of tooth profiles using parabolic curve as the line of action. Mech. Mach. Theory 2013, 67, 47–63. [Google Scholar] [CrossRef]
- Liang, D.; Chen, B.K.; Gao, Y.N. The generation principle and mathematical model of a new involute-helix gear drive. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2013, 227, 2834–2843. [Google Scholar] [CrossRef]
- Wang, Y.Z.; Ren, S.Y.; Li, Y. Design and manufacturing of a novel high contact ratio internal gear with a circular arc contact path. Int. J. Mech. Sci. 2019, 153–154, 143–153. [Google Scholar] [CrossRef]
- Peng, S.; Chen, B.K.; Liang, D.; Zhang, L.H.; Qin, S.L. Mathematical model and tooth contact analysis of an internal helical gear pair with selectable contact path. Int. J. Precis. Eng. Manuf. 2018, 19, 837–848. [Google Scholar] [CrossRef]
- Liu, L.; Meng, F.; Ni, J.L. A novel non-involute gear designed based on control of relative curvature. Mech. Mach. Theory 2019, 140, 144–158. [Google Scholar] [CrossRef]
- Chen, Z.; Ding, H.F.; Zeng, M. Nonrelative sliding gear mechanism based on function-oriented design of meshing line functions for parallel axes transmission. Adv. Mech. Eng. 2018, 10, 13. [Google Scholar] [CrossRef]
- Wang, J.; Luo, S.M.; Wu, Y. A method for the preliminary geometric design of gear tooth profiles with small sliding coefficients. J. Mech. Des. 2010, 132, 8. [Google Scholar] [CrossRef]
- Trobentar, B.; Kulovec, S.; Hlebanja, G.; Glodež, S. Experimental failure analysis of S-polymer gears. Eng. Fail. Anal. 2020, 111, 104496. [Google Scholar] [CrossRef]
- Zorko, D. Investigation on the high-cycle tooth bending fatigue and thermo-mechanical behavior of polymer gears with a progressive curved path of contact. Int. J. Fatigue 2021, 151, 106394. [Google Scholar] [CrossRef]
- Zorko, D.; Duhovnik, J.; Tavčar, J. Tooth bending strength of gears with a progressive curved path of contact. J. Comput. Des. Eng. 2021, 8, 1037–1058. [Google Scholar] [CrossRef]
- Sun, Q.; Sun, Y.H.; Chen, C. Computation of meshing imprint and loading capacity of S-shaped gear pair with small number (2–6) of pinion teeth. J. Braz. Soc. Mech. Sci. 2021, 43, 415. [Google Scholar] [CrossRef]
- Litvin, F.L.; Fuentes, A. Gear Geometry and Applied Theory; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Fong, Z.H.; Chiang, T.W.; Tsay, C.W. Mathematical model for parametric tooth profile of spur gear using line of action. Math. Comput. Model. 2002, 36, 603–614. [Google Scholar]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Design Parameter | Novel Gears | Involute Gears |
|---|---|---|
| Tooth number | 17/29 | 17/29 |
| Normal module (mm) | 2.25 | 2.25 |
| Face width (mm) | 25 | 25 |
| Addendum coefficient | 1 | 1 |
| Dedendum coefficient | 1.25 | 1.25 |
| Root radius (mm) | 1 | 1 |
| Contact ratio | 1.93 | 1.58 |
| k1 | 0.32 | / |
| k2 | 0.32 | / |
| Gears | Contact Stress σc | Bending Compressive Stress σbc | Bending Tensile Stress σbt |
|---|---|---|---|
| Involute gears | 510.65 | 206.39 | 165.65 |
| Novel gears Decrease | 428.41 16.10% | 192.45 6.75% | 151.59 8.49% |
| Modified Value | Contact Stress σc | Bending Compressive Stress σbc | Bending Tensile Stress σbt | ||
|---|---|---|---|---|---|
| y1/μm | y2/μm | y3/mm | |||
| 0 | 0 | 0 | 428.41 | 192.45 | 151.59 |
| 4 | 4 | 0 | 448.62 | 194.19 | 158.44 |
| 8 | 8 | 0 | 479.87 | 206.09 | 167.54 |
| 12 | 12 | 0 | 529.60 | 217.86 | 176.55 |
| 4 | 4 | 8 | 438.81 | 191.27 | 156.53 |
| 8 | 8 | 8 | 473.53 | 200.18 | 200.18 |
| 12 | 12 | 8 | 507.97 | 208.74 | 170.51 |
| Gears | Condition | Contact Stress σc | Bending Compressive stress σbc | Bending Tensile Stress σbt |
|---|---|---|---|---|
| Involute gears | Δγ = 0′ | 510.65 | 206.39 | 165.65 |
| Δγ = 1′ | 606.65 | 238.74 | 191.73 | |
| Δγ = 2′ | 703.67 | 272.88 | 217.91 | |
| Δγ = 3′ | 800.69 | 307.39 | 244.06 | |
| Novel gears | Δγ = 0′ | 428.41 | 192.45 | 151.59 |
| Δγ = 1′ | 533.78 | 225.32 | 174.97 | |
| Δγ = 2′ | 639.50 | 258.18 | 198.84 | |
| Δγ = 3′ | 745.41 | 291.15 | 227.04 |
| Gears | Condition | Contact Stress σc | Bending Compressive stress σbc | Bending Tensile Stress σbt |
|---|---|---|---|---|
| Involute gears | Δγ = 0′ | 531.94 | 216.60 | 178.04 |
| Δγ = 1′ | 564.92 | 227.21 | 185.37 | |
| Δγ = 2′ | 604.31 | 246.41 | 199.69 | |
| Δγ = 3′ | 647.75 | 275.36 | 220.69 | |
| Novel gears | Δγ = 0′ | 473.53 | 200.18 | 163.66 |
| Δγ = 1′ | 510.99 | 209.24 | 171.05 | |
| Δγ = 2′ | 553.01 | 230.36 | 185.52 | |
| Δγ = 3′ | 599.72 | 259.56 | 204.01 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jia, C.; He, Q.; Xiao, J.; Dong, H. Design and Analysis of Novel Non-Involute Cylindrical Gears with a Curved Path of Contact. Mathematics 2022, 10, 4290. https://doi.org/10.3390/math10224290
Jia C, He Q, Xiao J, Dong H. Design and Analysis of Novel Non-Involute Cylindrical Gears with a Curved Path of Contact. Mathematics. 2022; 10(22):4290. https://doi.org/10.3390/math10224290
Chicago/Turabian StyleJia, Chao, Qingtuo He, Jianming Xiao, and Hui Dong. 2022. "Design and Analysis of Novel Non-Involute Cylindrical Gears with a Curved Path of Contact" Mathematics 10, no. 22: 4290. https://doi.org/10.3390/math10224290