
Synchronization of Fractional-Order Neural Networks with Time Delays and Reaction-Diffusion Terms via Pinning Control
 , ,
, ,  ,
,
Abstract
:1. Introduction
- (1)
- Time delays, including distributed delay and reaction-diffusion terms, are considered in our system, which makes it more similar to the actual model;
- (2)
- We use the Caputo partial fractional derivatives that allow the initial and boundary conditions to be in a format uniform to that in the integer-order neural networks;
- (3)
- By employing the stability theory, the fractional-order Lyapunov method, inequality techniques and the fractional comparison principle, several new sufficient criteria for synchronization based on pinning control are provided;
- (4)
- Numerical examples are presented to demonstrate the effectiveness of the derived synchronization criteria.
2. Model Description and Preliminaries
3. Synchronization Scheme and Synchronization Results
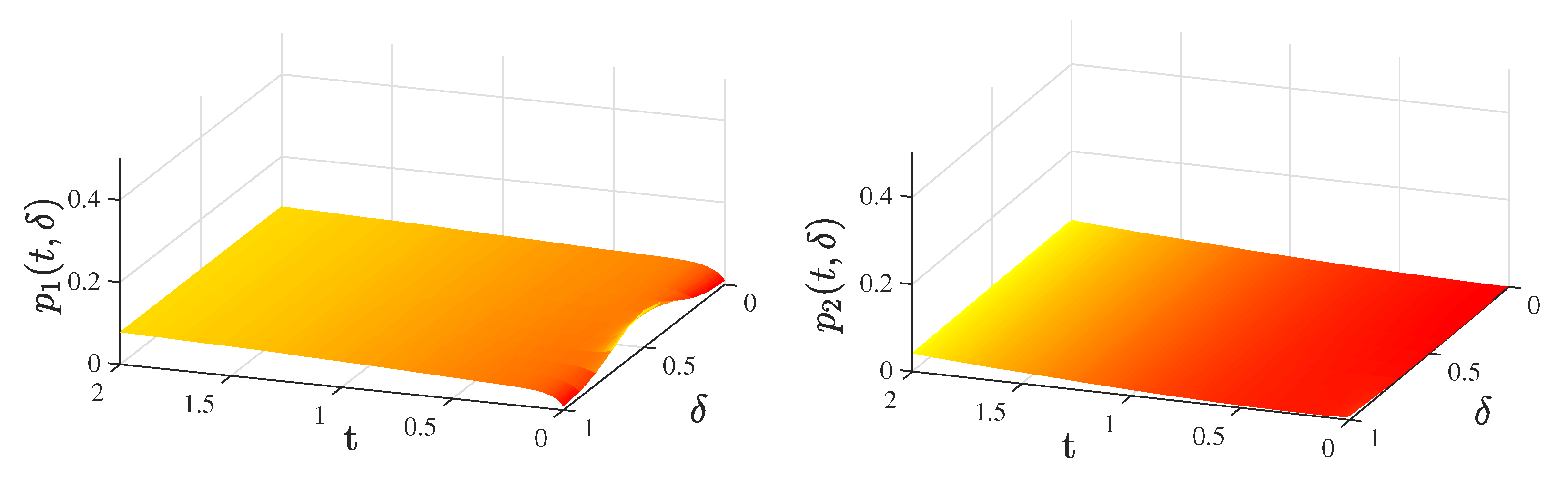
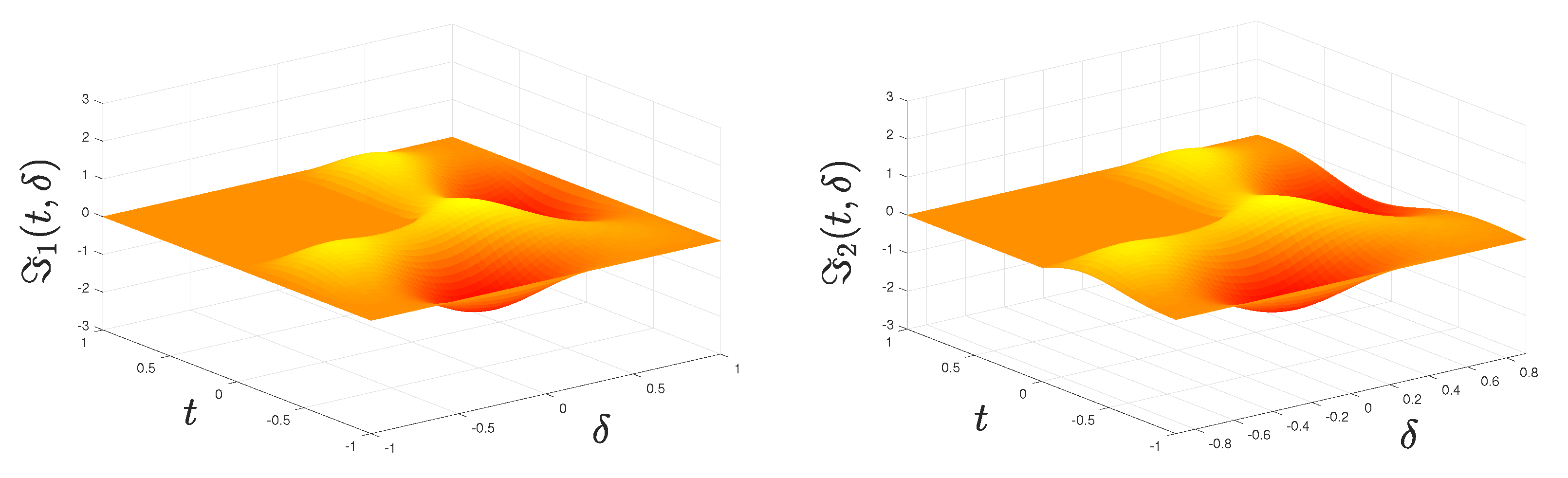
4. Numerical Examples
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kilbas, A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations, 1st ed.; Elsevier: New York, NY, USA, 2006; ISBN 9780444518323. [Google Scholar]
- Baleanu, D.; Diethelm, K.; Scalas, E.; Trujillo, J.J. Fractional Calculus: Models and Numerical Methods, 1st ed.; World Scientific: Singapore, 2012; ISBN 978-981-4355-20-9. [Google Scholar]
- Magin, R. Fractional Calculus in Bioengineering, 1st ed.; Begell House: Redding, CA, USA, 2006; ISBN 978-1567002157. [Google Scholar]
- Bukhari, A.H.; Raja, M.A.Z.; Sulaiman, M.; Islam, S.; Shoaib, M.; Kumam, P. Fractional neuro-sequential ARFIMA-LSTM for financial market forecasting. IEEE Access 2020, 8, 71326–71338. [Google Scholar] [CrossRef]
- Stamova, I.M.; Stamov, G.T. Functional and Impulsive Differential Equations of Fractional Order: Qualitative Analysis and Applications, 1st ed.; CRC Press/Taylor and Francis Group: Boca Raton, FL, USA, 2017; ISBN 9781498764834. [Google Scholar]
- Haykin, S. Neural Networks: A Comprehensive Foundation; Prentice-Hall: Englewood Cliffs, NJ, USA, 1999; ISBN 0132733501/9780132733502. [Google Scholar]
- Jahanbakhti, H. A novel fractional-order neural network for model reduction of large-scale systems with fractional-order nonlinear structure. Soft Comput. 2020, 24, 13489–13499. [Google Scholar] [CrossRef]
- Zun˜iga Aguilar, C.J.; Gómez-Aguilar, J.F.; Alvarado-Martínez, V.M.; Romero-Ugalde, H.M. Fractional order neural networks for system identification. Chaos Solitions Fractals 2020, 130, 109444. [Google Scholar] [CrossRef]
- Kaslik, E.; Sivasundaram, S. Nonlinear dynamics and chaos in fractional order neural networks. Neural Netw. 2012, 32, 245–256. [Google Scholar] [CrossRef] [PubMed]
- Lundstrom, B.; Higgs, M.; Spain, W.; Fairhall, A.L. Fractional differentiation by neocortical pyramidal neurons. Nat. Neurosci. 2008, 11, 1335–1342. [Google Scholar] [CrossRef]
- Anbalagan, P.; Hincal, E.; Ramachandran, R.; Baleanu, D.; Cao, J.; Niezabitowski, M. A Razumikhin approach to stability and synchronization criteria for fractional order time delayed gene regulatory networks. AIMS Math. 2021, 6, 4526–4555. [Google Scholar] [CrossRef]
- Stamov, T.; Stamova, I. Design of impulsive controllers and impulsive control strategy for the Mittag–Leffler stability behavior of fractional gene regulatory networks. Neurocomputing 2021, 424, 54–62. [Google Scholar] [CrossRef]
- Kandasamy, U.; Li, X.; Rakkiyappan, R. Quasi-synchronization and bifurcation results on fractional-order quaternion-valued neural networks. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 4063–4072. [Google Scholar] [CrossRef]
- Song, C.; Cao, J. Dynamics in fractional-order neural networks. Neurocomputing 2014, 142, 494–498. [Google Scholar] [CrossRef]
- Cheng, H.; Zhong, S.; Zhong, Q.; Shi, K.; Wang, X. Lag exponential synchronization of delayed memristor-based neural networks via robust analysis. IEEE Access 2019, 7, 173–182. [Google Scholar] [CrossRef]
- Lee, S.H.; Park, M.J.; Kwon, O.M.; Selvaraj, P. Improved synchronization criteria for chaotic neural networks with sampled-data control subject to actuator saturation. Int. J. Control Autom. Syst. 2019, 17, 2430–2440. [Google Scholar] [CrossRef]
- Zhang, R.; Zeng, D.; Zhong, S.; Shi, K. Memory feedback PID control for exponential synchronization of chaotic Lur’e systems. Int. J. Syst. Sci. 2017, 48, 2473–2484. [Google Scholar] [CrossRef]
- Senan, S.; Syed Ali, M.; Vadivel, R.; Arik, S. Decentralized event-triggered synchronization of uncertain Markovian jumping neutral-type neural networks with mixed delays. Neural Netw. 2017, 86, 32–41. [Google Scholar] [CrossRef] [PubMed]
- Shi, L.; Zhu, H.; Zhong, S.; Shi, K.; Cheng, J. Cluster synchronization of linearly coupled complex networks via linear and adaptive feedback pinning controls. Nonlinear Dyn. 2017, 88, 859–870. [Google Scholar] [CrossRef]
- Syed Ali, M.; Yogambigai, J.; Cao, J. Synchronization of master-slave Markovian switching complex dynamical networks with time-varying delays in nonlinear function via sliding mode control. Acta Math. Sci. Ser. B Engl. Ed. 2017, 37, 368–384. [Google Scholar]
- Wang, J.; Shi, K.; Huang, Q.; Zhong, S.; Zhang, D. Stochastic switched sampled-data control for synchronization of delayed chaotic neural networks with packet dropout. Appl. Math. Comput. 2018, 335, 211–230. [Google Scholar] [CrossRef]
- Gu, K.; Kharitonov, V.L.; Chen, J. Stability of Time Delay Systems, 2nd ed.; Birkhuser: Boston, MA, USA, 2003; ISBN 978-1-4612-0039-0. [Google Scholar]
- Li, X.; Yang, X.; Song, S. Lyapunov conditions for finite-time stability of time-varying time-delay systems. Automatica 2019, 103, 135–140. [Google Scholar] [CrossRef]
- Chen, L.; Wu, R.; Chu, Z.; He, Y.; Yin, L. Pinning synchronization of fractional-order delayed complex networks with non-delayed and delayed couplings. Int. J. Control 2017, 90, 1245–1255. [Google Scholar] [CrossRef]
- Zhang, W.; Zhang, H.; Cao, J.; Zhang, H.; Chen, D. Synchronization of delayed fractional-order complex-valued neural networks with leakage delay. Phys. A 2020, 556, 124710. [Google Scholar] [CrossRef]
- Ali, M.S.; Hymavathi, M. Synchronization of fractional order neutral type fuzzy cellular neural networks with discrete and distributed delays via state feedback control. Neural Process. Lett. 2021, 53, 929–957. [Google Scholar] [CrossRef]
- Zhang, Y.J.; Liu, S.; Yang, R.; Tan, Y.Y.; Li, X. Global synchronization of fractional coupled networks with discrete and distributed delays. Phys. A 2019, 514, 830–837. [Google Scholar] [CrossRef]
- Lv, X.; Cao, J.; Li, X.; Abdel-Aty, M.; Al-Juboori, U.A. Synchronization analysis for complex dynamical networks with coupling delay via event-triggered delayed impulsive control. IEEE Trans. Cybern. 2021, 51, 5269–5278. [Google Scholar] [CrossRef] [PubMed]
- Yang, X.; Li, X.; Lu, J.; Cheng, Z. Synchronization of time-delayed complex networks with switching topology via hybrid actuator fault and impulsive effects control. IEEE Trans. Cybern. 2020, 50, 4043–4052. [Google Scholar] [CrossRef] [PubMed]
- Kumar, S.; Matouk, A.E.; Chaudhary, H.; Kant, S. Control and synchronization of fractional-order chaotic satellite systems using feedback and adaptive control techniques. Int. J. Adapt. Control Signal Process. 2021, 35, 484–497. [Google Scholar] [CrossRef]
- Padron, J.P.; Perez, J.P.; Pérez Díaz, J.J.; Martinez Huerta, A. Time-delay synchronization and anti-synchronization of variable-order fractional discrete-time Chen–Rossler chaotic systems using variable-order fractional discrete-time PID control. Mathematics 2021, 9, 2149. [Google Scholar] [CrossRef]
- Yang, X.; Cao, J.; Yang, Z. Synchronization of coupled reaction- diffusion neural networks with time-varying delays via pinning impulsive controller. SIAM J. Control Optim. 2013, 51, 3486–3510. [Google Scholar] [CrossRef]
- Lagergren, J.H.; Nardini, J.T.; Baker, R.E.; Simpson, M.J.; Flores, K.B. Biologically informed neural networks guide mechanistic modeling from sparse experimental data. PLoS Comput. Biol. 2020, 16, e1008462. [Google Scholar] [CrossRef]
- Stamov, G.; Stamova, I.; Spirova, C. Impulsive reaction-diffusion delayed models in biology: Integral manifolds approach. Entropy 2021, 23, 1631. [Google Scholar] [CrossRef] [PubMed]
- Lv, Y.; Hu, C.; Yu, J.; Jiang, H.; Huang, T. Edge-based fractional-order adaptive strategies for synchronization of fractional-order coupled networks with reaction-diffusion terms. IEEE Trans. Cybern. 2020, 50, 1582–1594. [Google Scholar] [CrossRef]
- Stamova, I.; Stamov, G. Mittag–Leffler synchronization of fractional neural networks with time-varying delays and reaction-diffusion terms using impulsive and linear controllers. Neural Netw. 2017, 96, 22–32. [Google Scholar] [CrossRef]
- Yin, W.; Liu, S.; Wu, X. Synchronization of fractional reaction-diffusion neural networks with time-varying delays and input saturation. IEEE Access 2021, 9, 50907–50916. [Google Scholar]
- Li, B.; Wang, N.; Ruan, X.; Pan, Q. Pinning and adaptive synchronization of fractional-order complex dynamical networks with and without time-varying delay. Adv. Differ. Equ. 2018, 2018, 6. [Google Scholar] [CrossRef] [Green Version]
- Tang, Y.; Wang, Z.; Fang, J. Pinning control of fractional-order weighted complex networks. Chaos 2009, 19, 013112. [Google Scholar] [CrossRef]
- Wang, J.; Ma, Q.; Chen, A.; Liang, Z. Pinning synchronization of fractional-order complex networks with Lipschitz-type nonlinear dynamics. ISA Trans. 2015, 57, 111–116. [Google Scholar] [CrossRef] [PubMed]
- Xai, H.; Ren, G.; Yu, Y.; Xu, C. Adaptive pinning synchronization of fractional complex networks with impulses and reaction-diffusion terms. Mathematics 2019, 4, 405. [Google Scholar]
- Delavari, H.; Baleanu, D.; Sadati, J. Stability analysis of Caputo fractional-order nonlinear systems revisited. Nonlinear Dyn. 2012, 67, 2433–2439. [Google Scholar] [CrossRef]
- Duatte-Mermound, M.A.; Aguila-Camacho, N.; Gallegos, J.A.; Castro-Limares, R. Using general quadratic Lyapunov functions to prove Lyapunov uniform stability of fractional order systems. Commun. Nonlinear Sci. Numer. Simul. 2015, 22, 650–659. [Google Scholar] [CrossRef]
- Liang, S.; Wu, R.; Chen, L. Comparision principles and stability of nonlinear fractional-order cellular neural networks with multiple time delays. Neurocomputing 2015, 168, 618–625. [Google Scholar] [CrossRef]
- Lu, J.G. Global exponential stability and periodicity of reaction-diffusion delayed recurrent neural networks with Dirichlet boundary conditions. Chaos Solitions Fractals 2008, 35, 116–125. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hymavathi, M.; Ibrahim, T.F.; Ali, M.S.; Stamov, G.; Stamova, I.; Younis, B.A.; Osman, K.I. Synchronization of Fractional-Order Neural Networks with Time Delays and Reaction-Diffusion Terms via Pinning Control. Mathematics 2022, 10, 3916. https://doi.org/10.3390/math10203916
Hymavathi M, Ibrahim TF, Ali MS, Stamov G, Stamova I, Younis BA, Osman KI. Synchronization of Fractional-Order Neural Networks with Time Delays and Reaction-Diffusion Terms via Pinning Control. Mathematics. 2022; 10(20):3916. https://doi.org/10.3390/math10203916
Chicago/Turabian StyleHymavathi, M., Tarek F. Ibrahim, M. Syed Ali, Gani Stamov, Ivanka Stamova, B. A. Younis, and Khalid I. Osman. 2022. "Synchronization of Fractional-Order Neural Networks with Time Delays and Reaction-Diffusion Terms via Pinning Control" Mathematics 10, no. 20: 3916. https://doi.org/10.3390/math10203916