
Trajectory Tracking Design for a Swarm of Autonomous Mobile Robots: A Nonlinear Adaptive Optimal Approach

Abstract
:1. Introduction
2. Trajectory Tracking Dynamics for a Swarm of Autonomous Mobile Robots
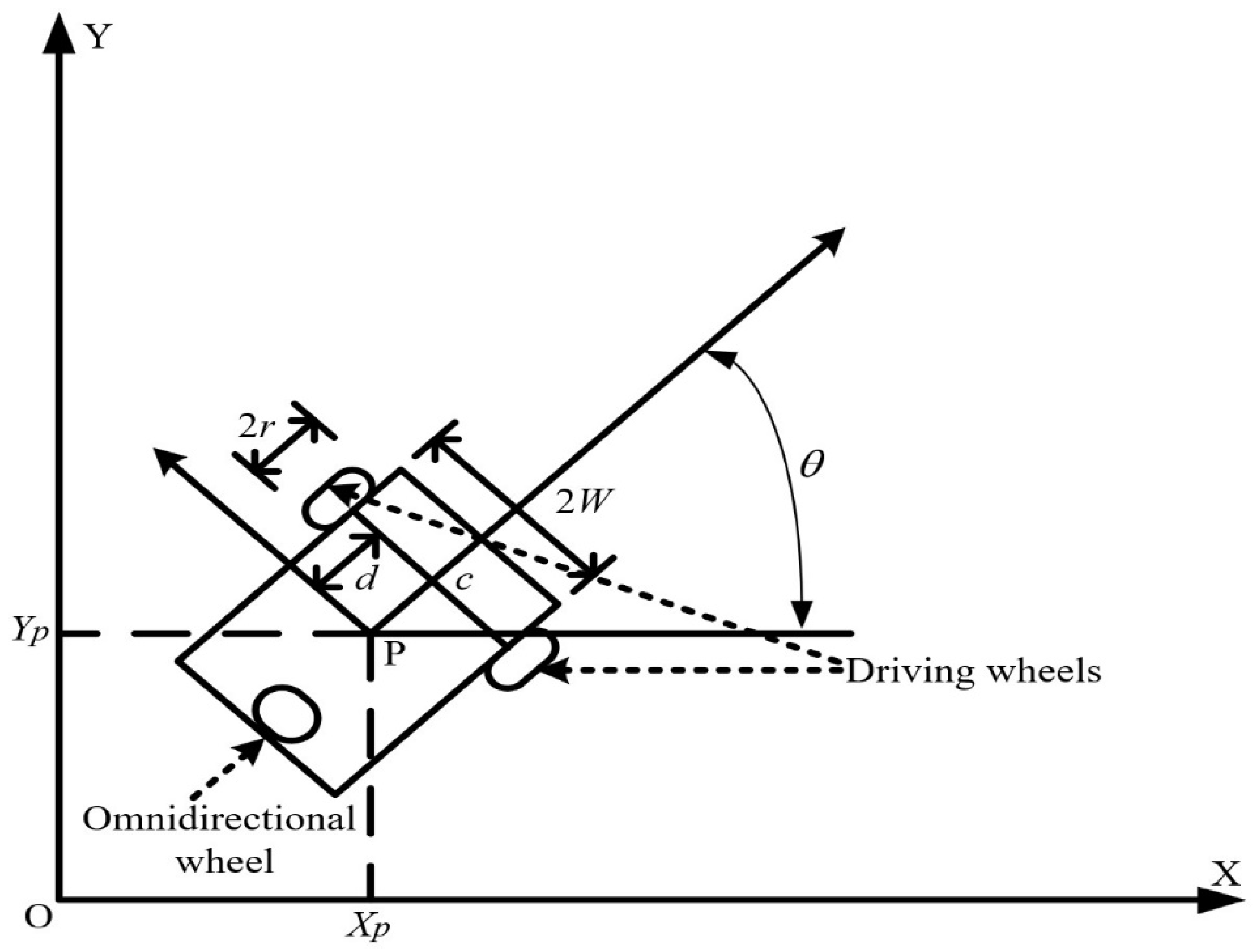
2.1. Dynamics of a Single AMR
2.2. Trajectory Tracking Error Dynamics
3. Nonlinear Adaptive Optimal Control Approach
3.1. The Trajectory Tracking Problem of a Swarm of AMRs
3.2. Analytical Solution of the Trajectory Tracking Problem of a Swarm of AMRs
4. Performance Verification
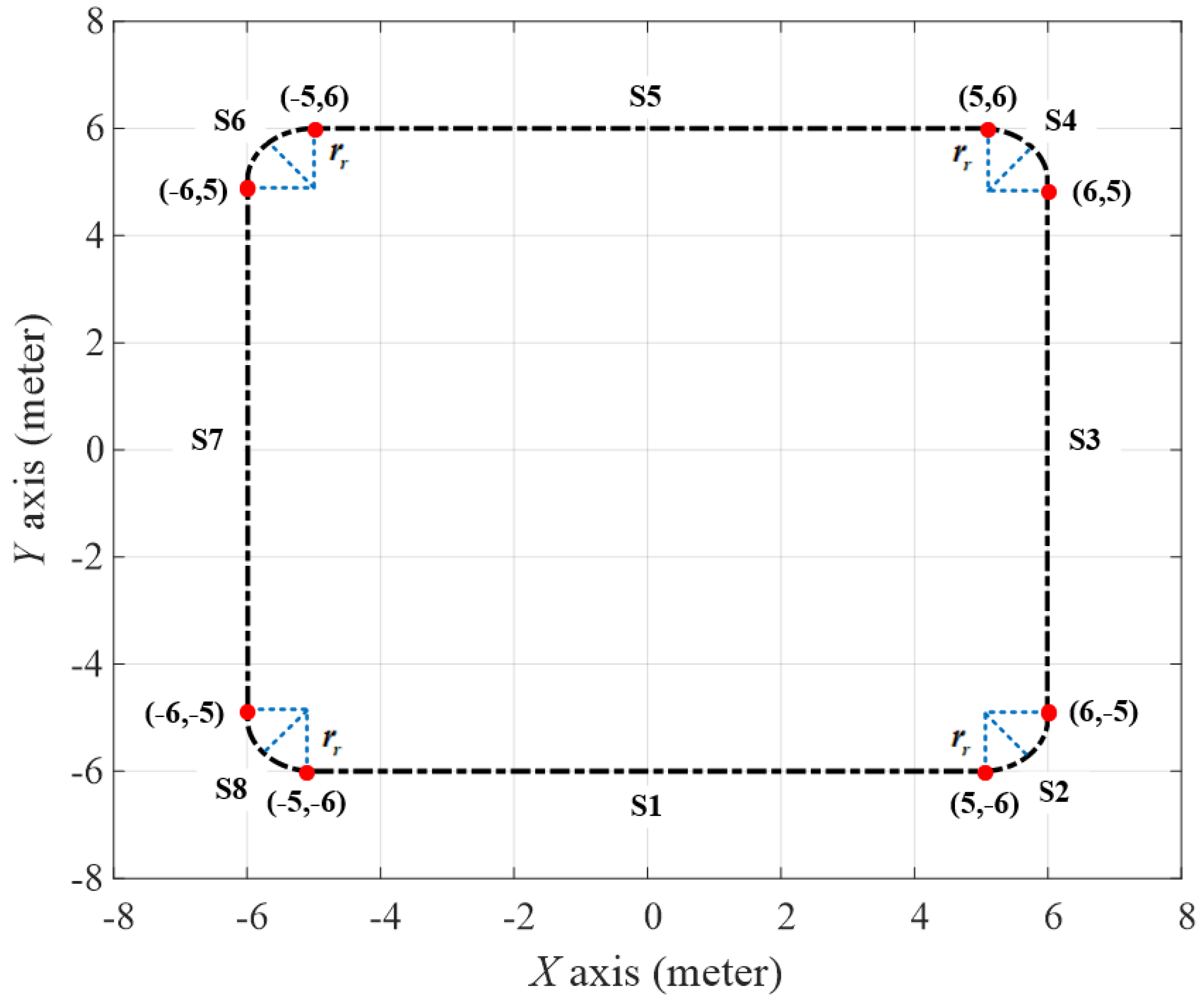
4.1. Setting of Simulation Environment
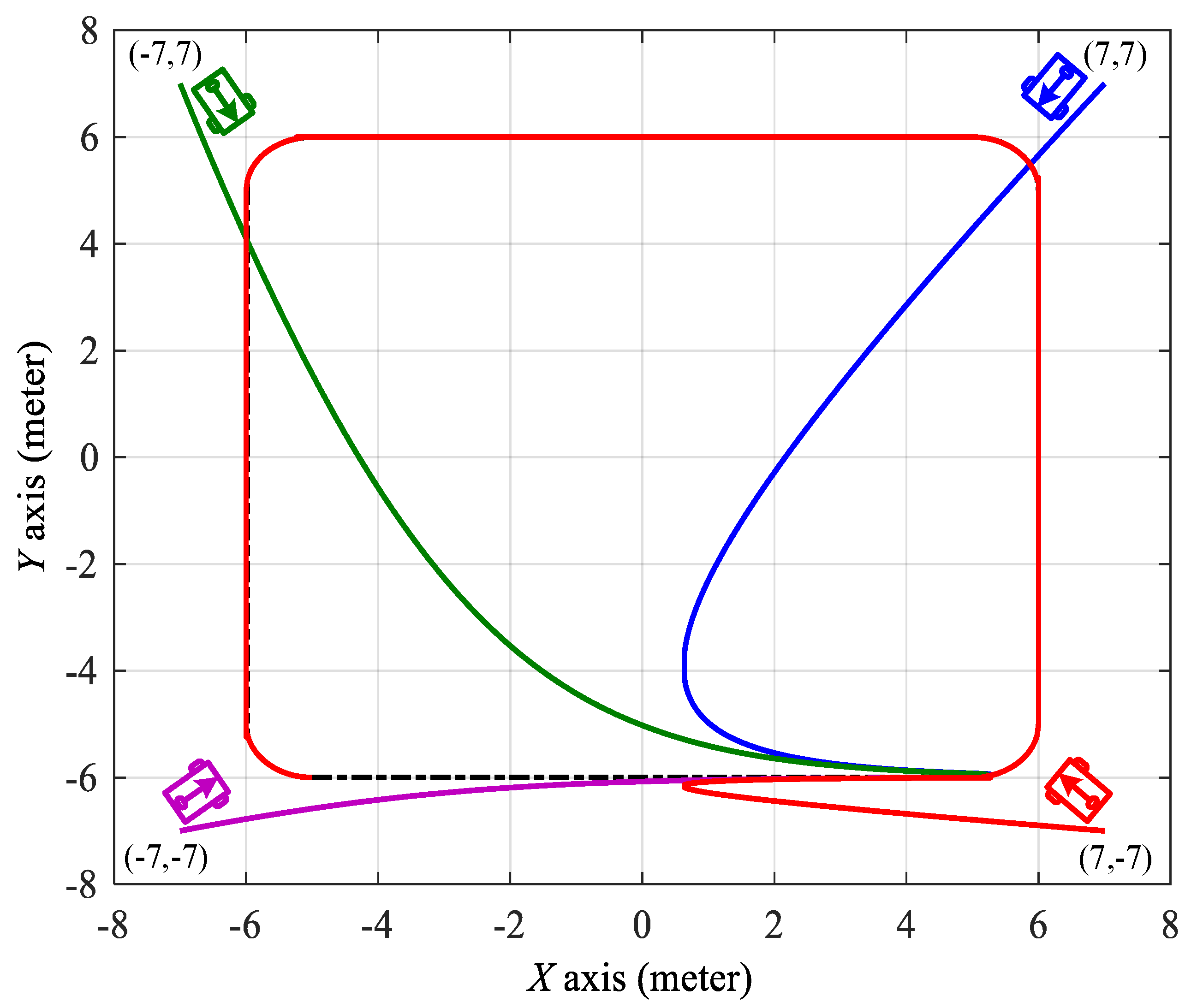
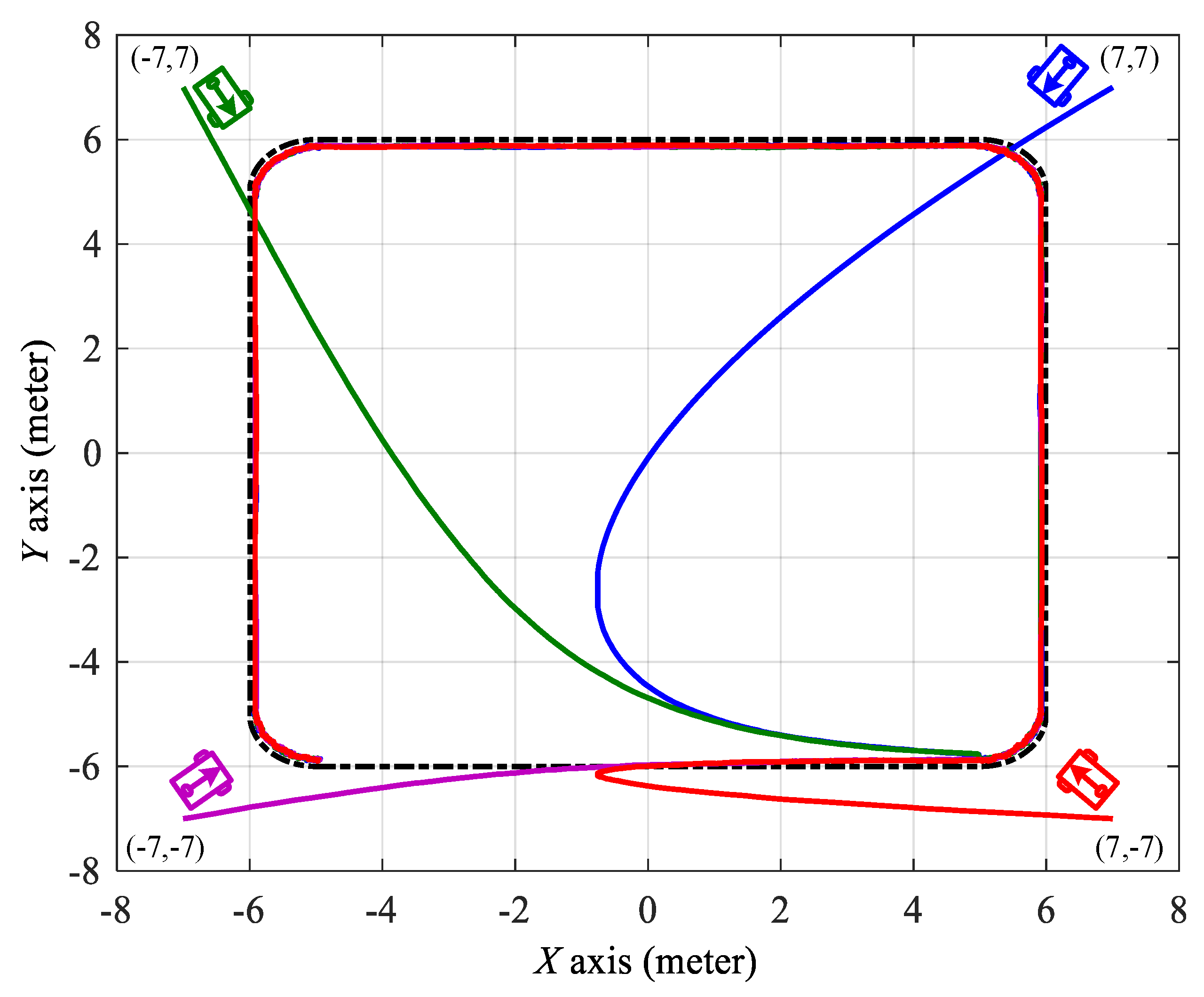
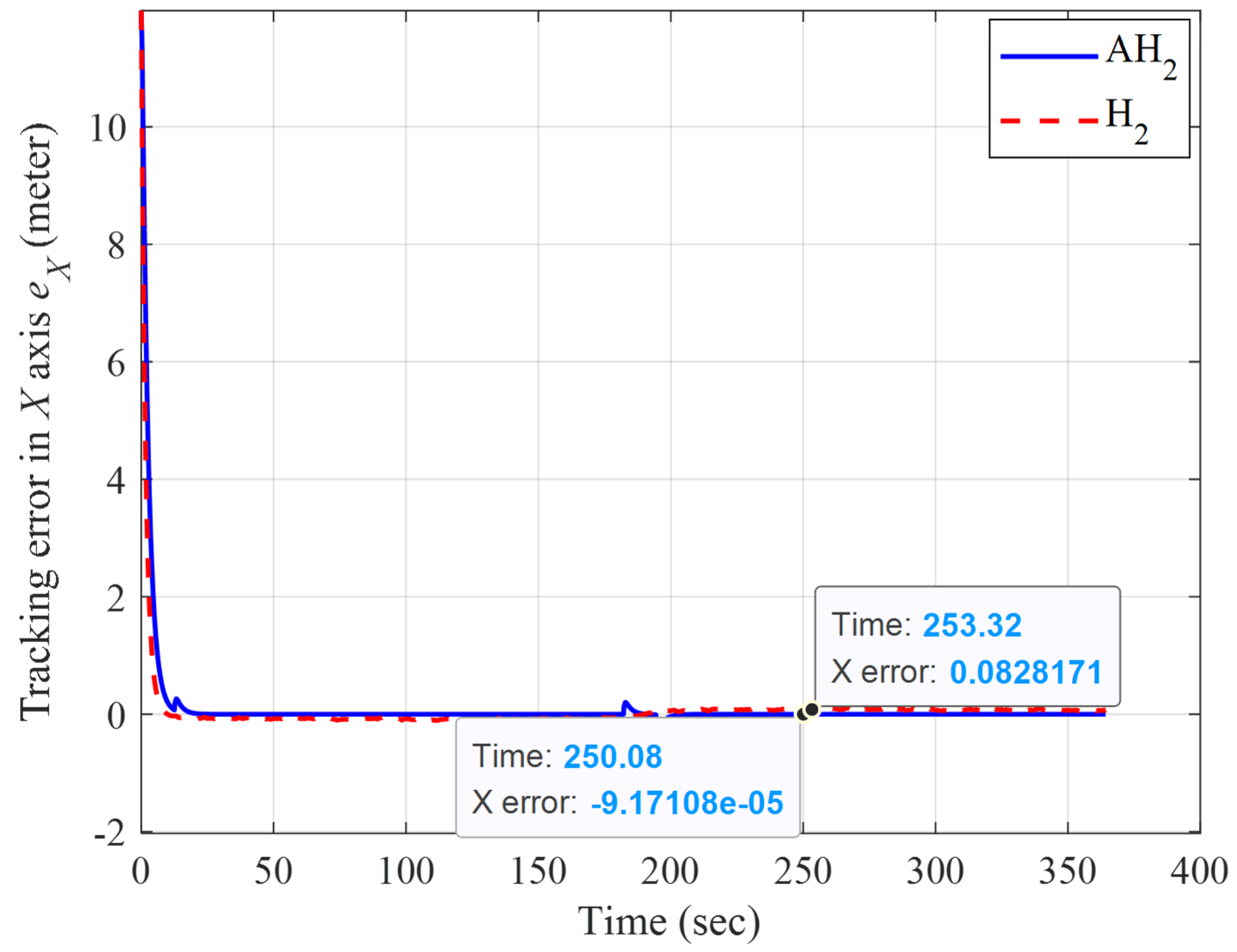
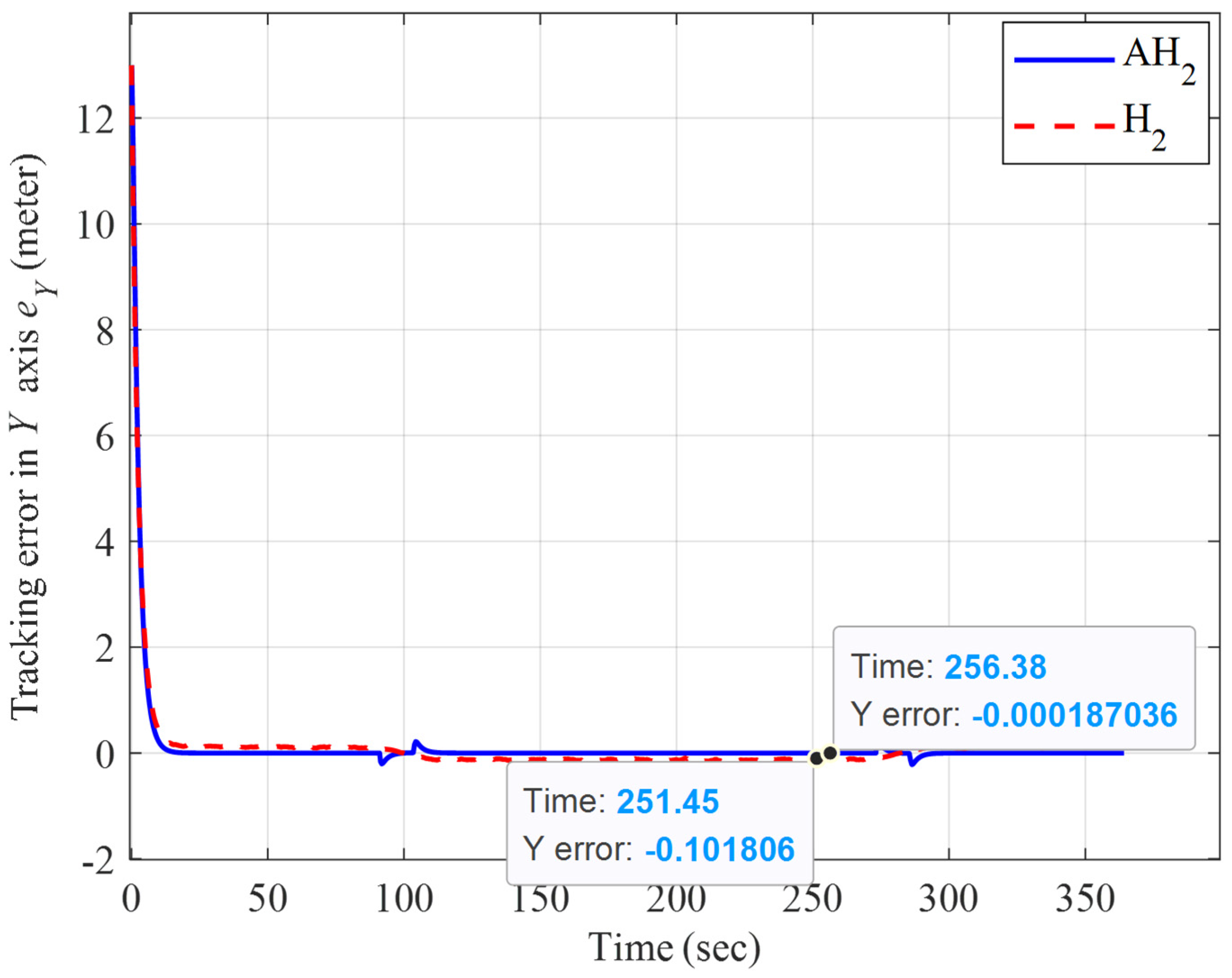
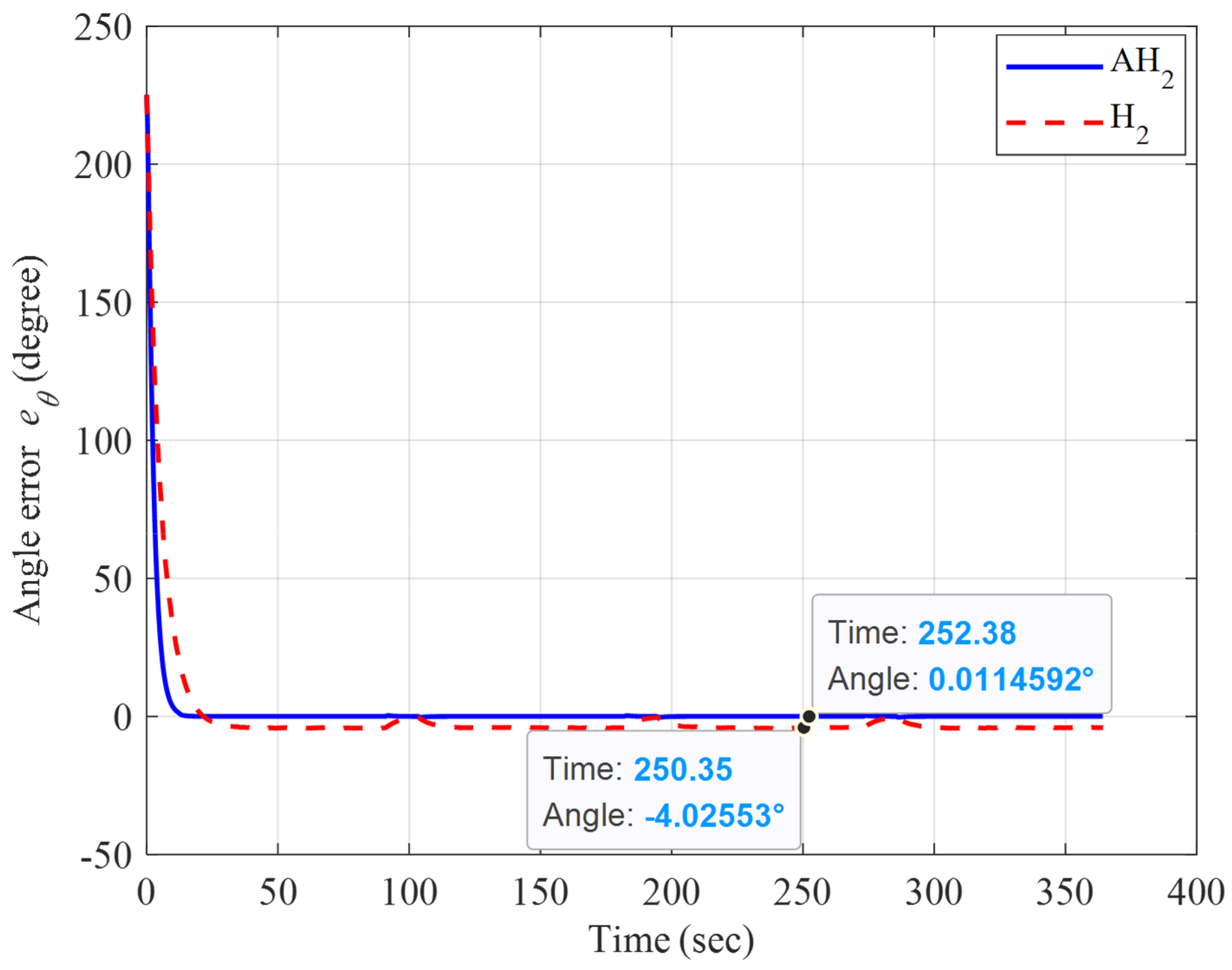
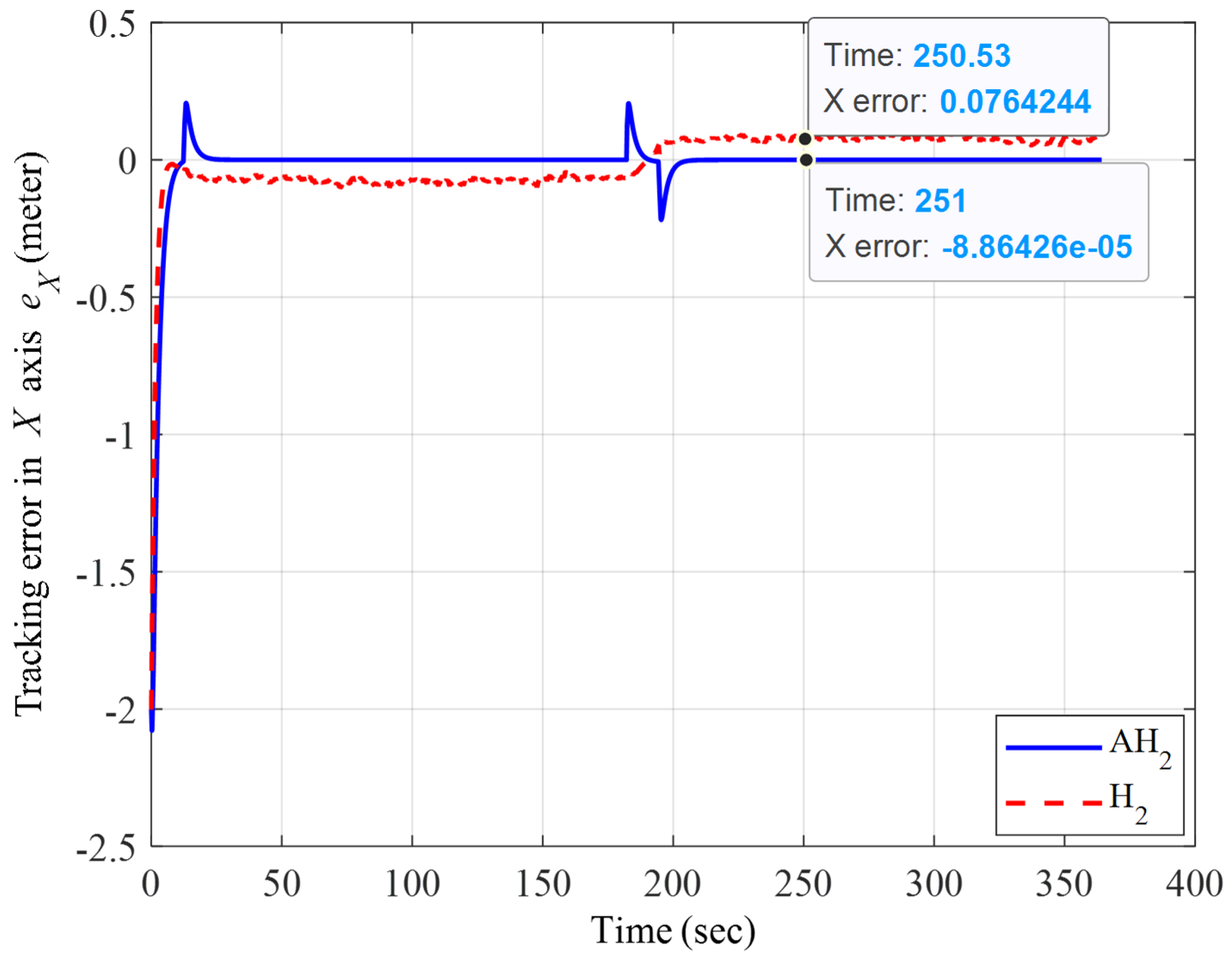
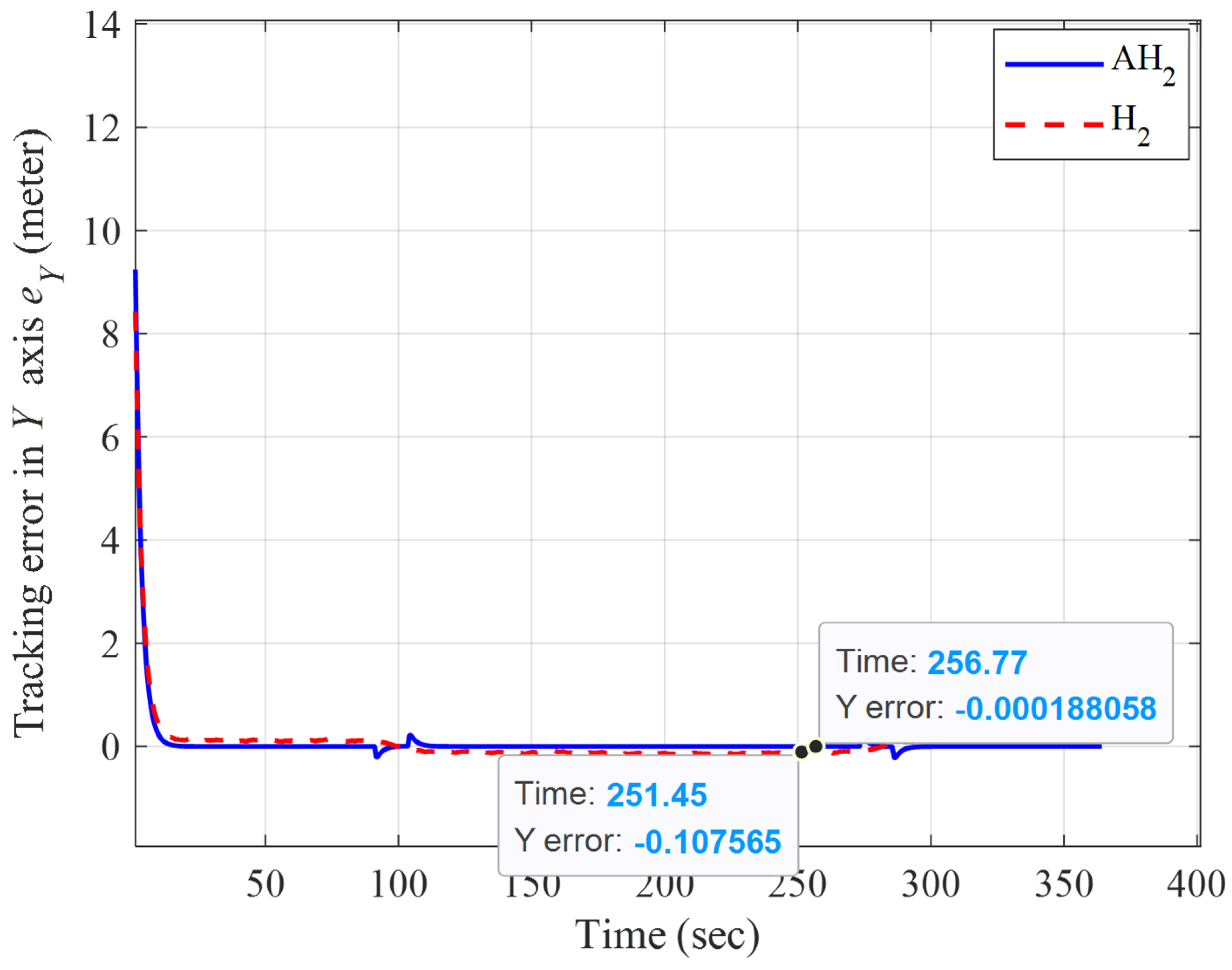
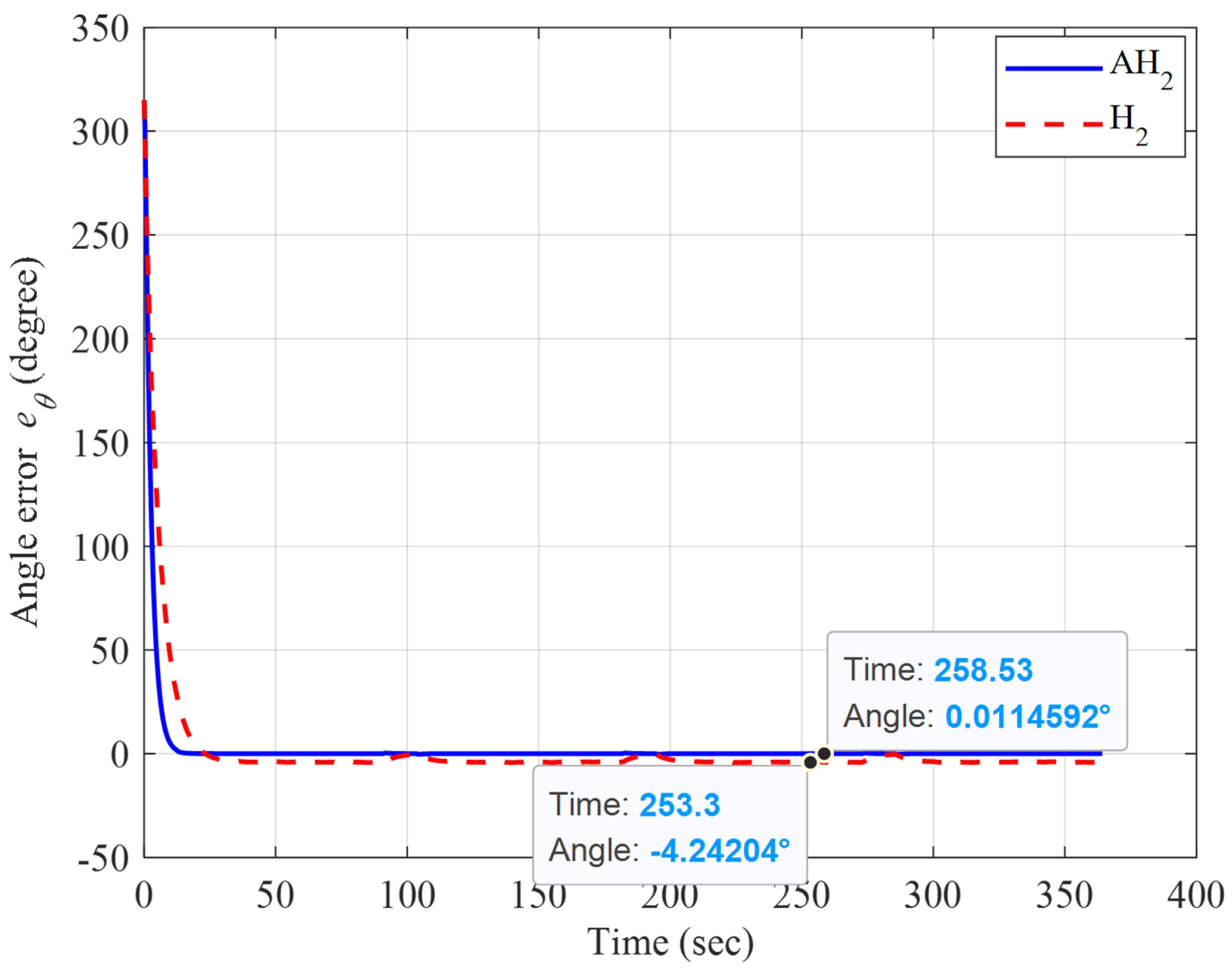
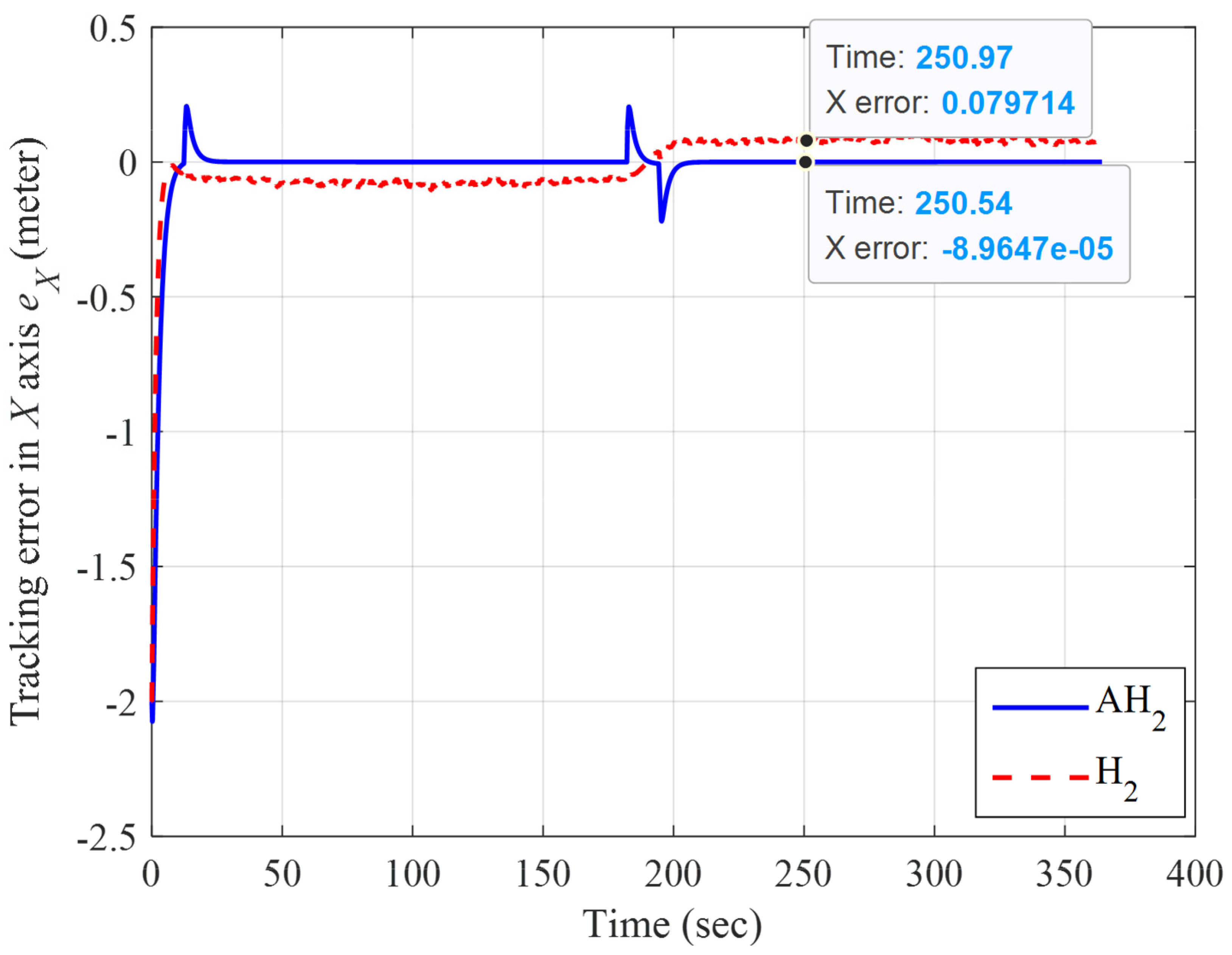
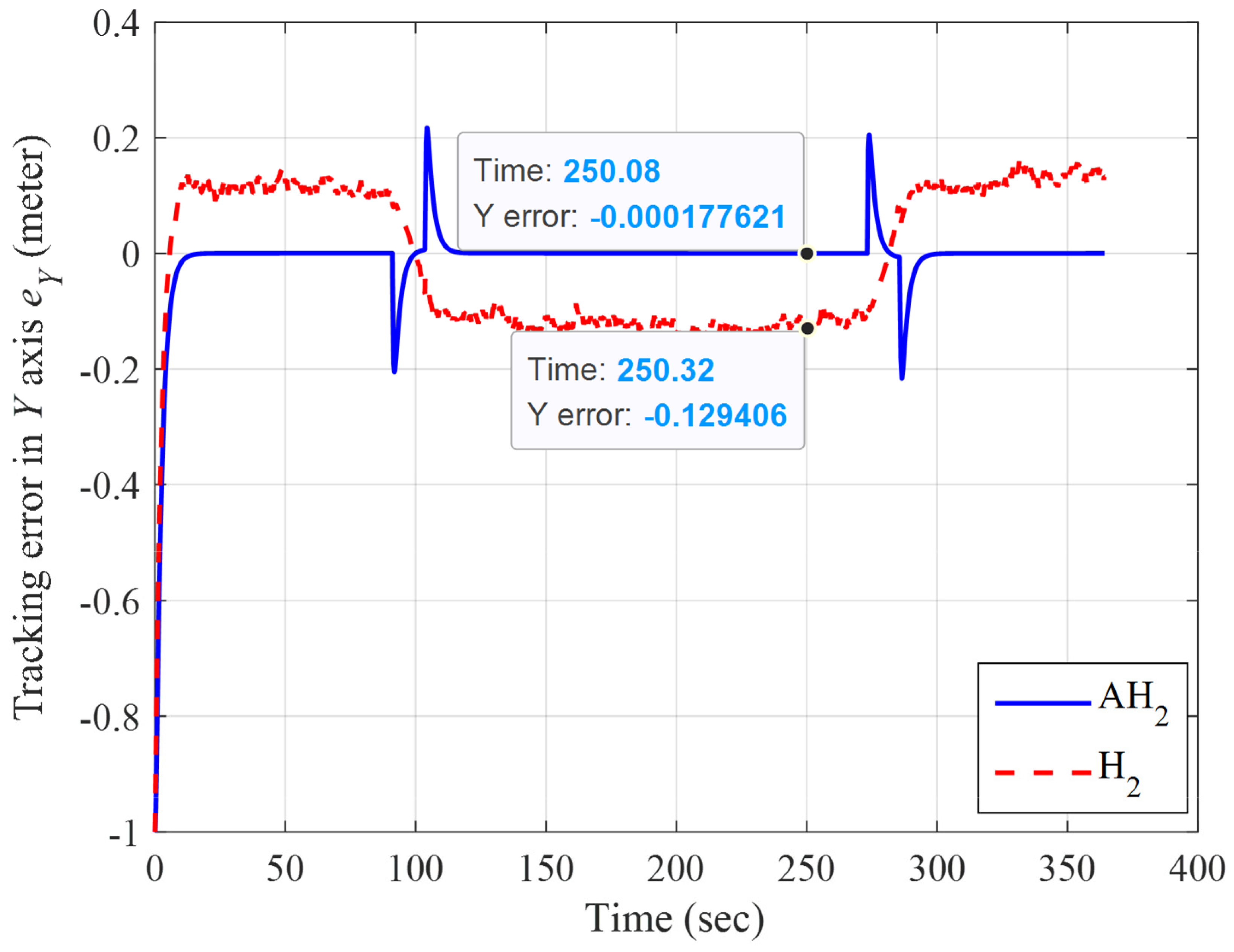
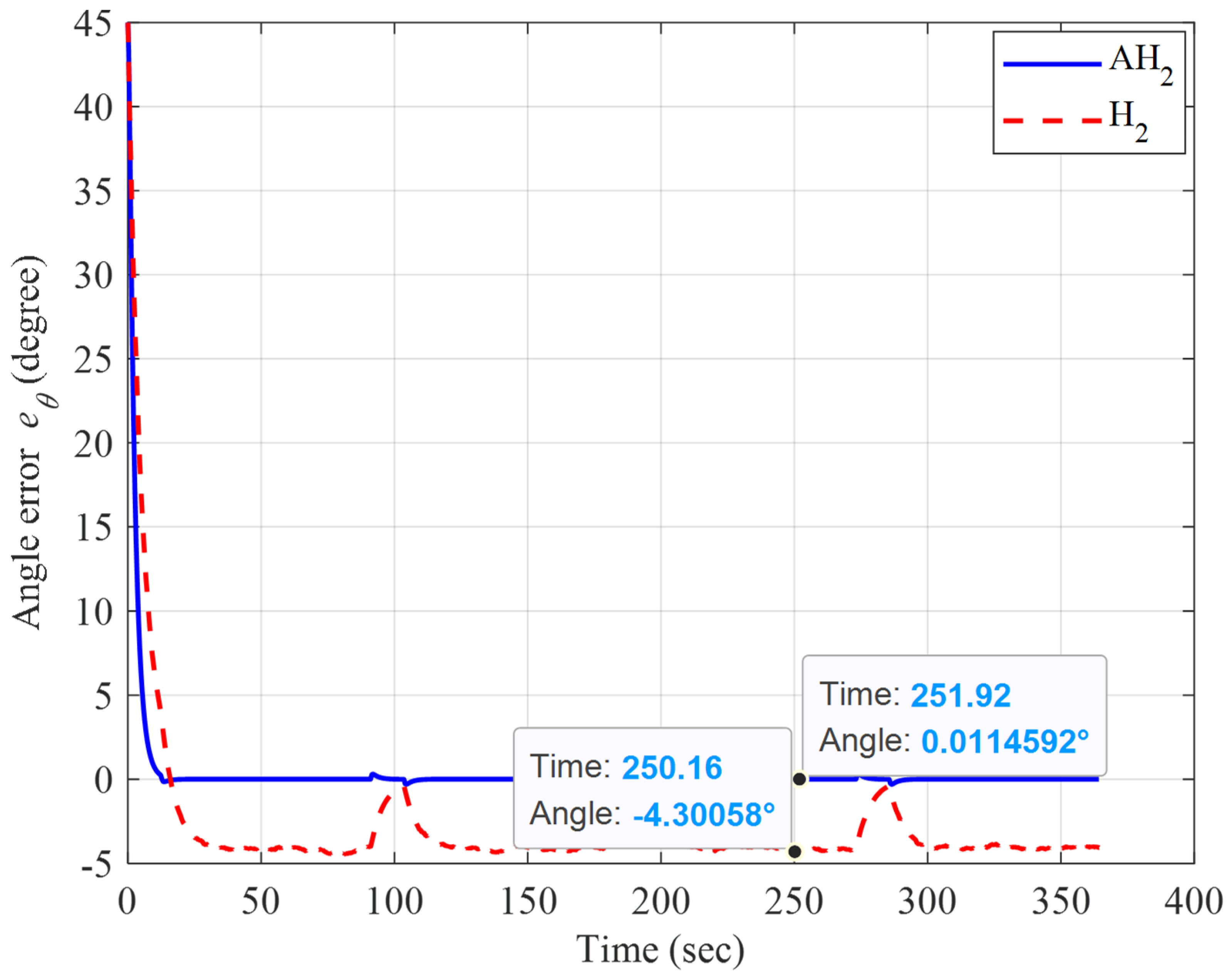
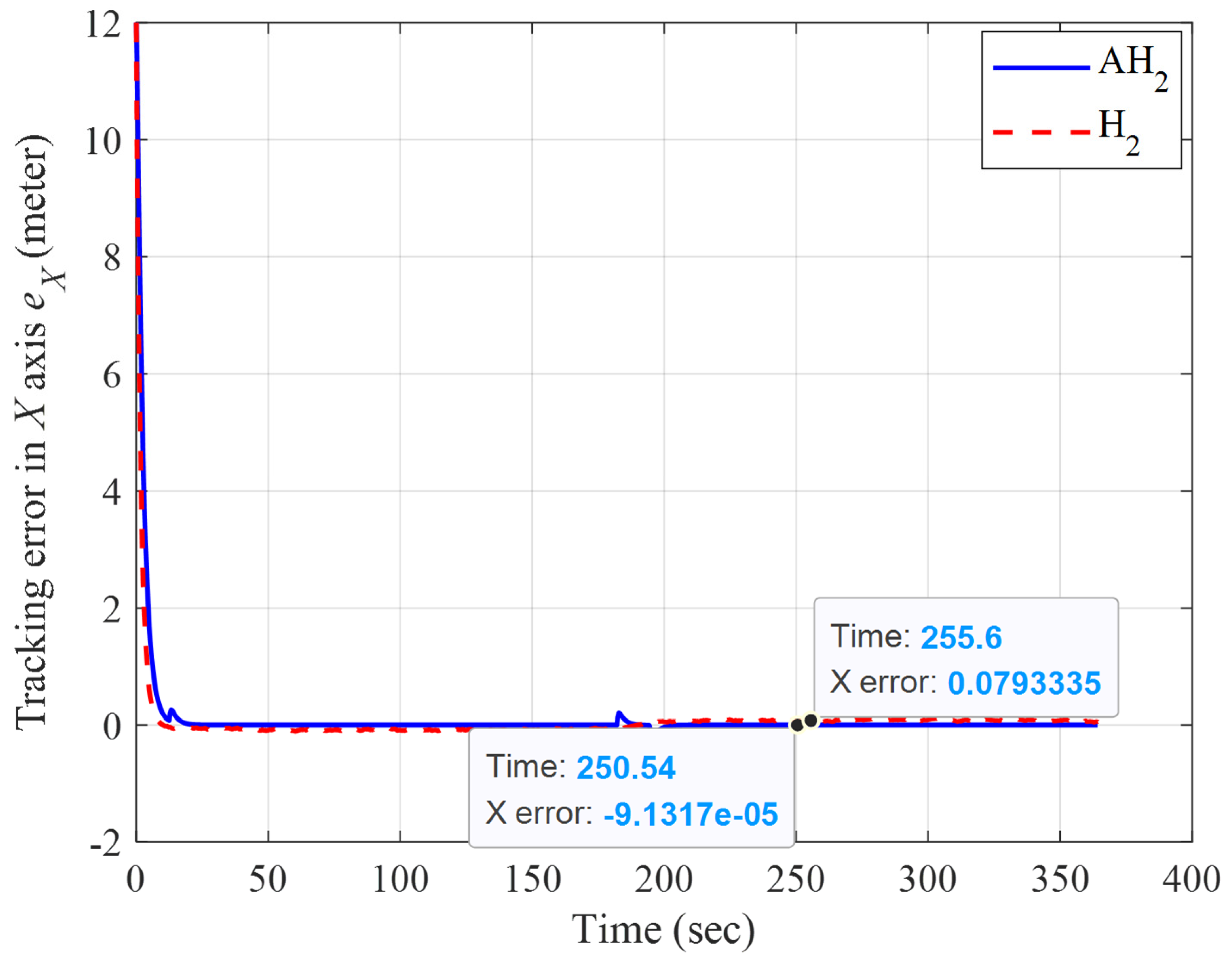
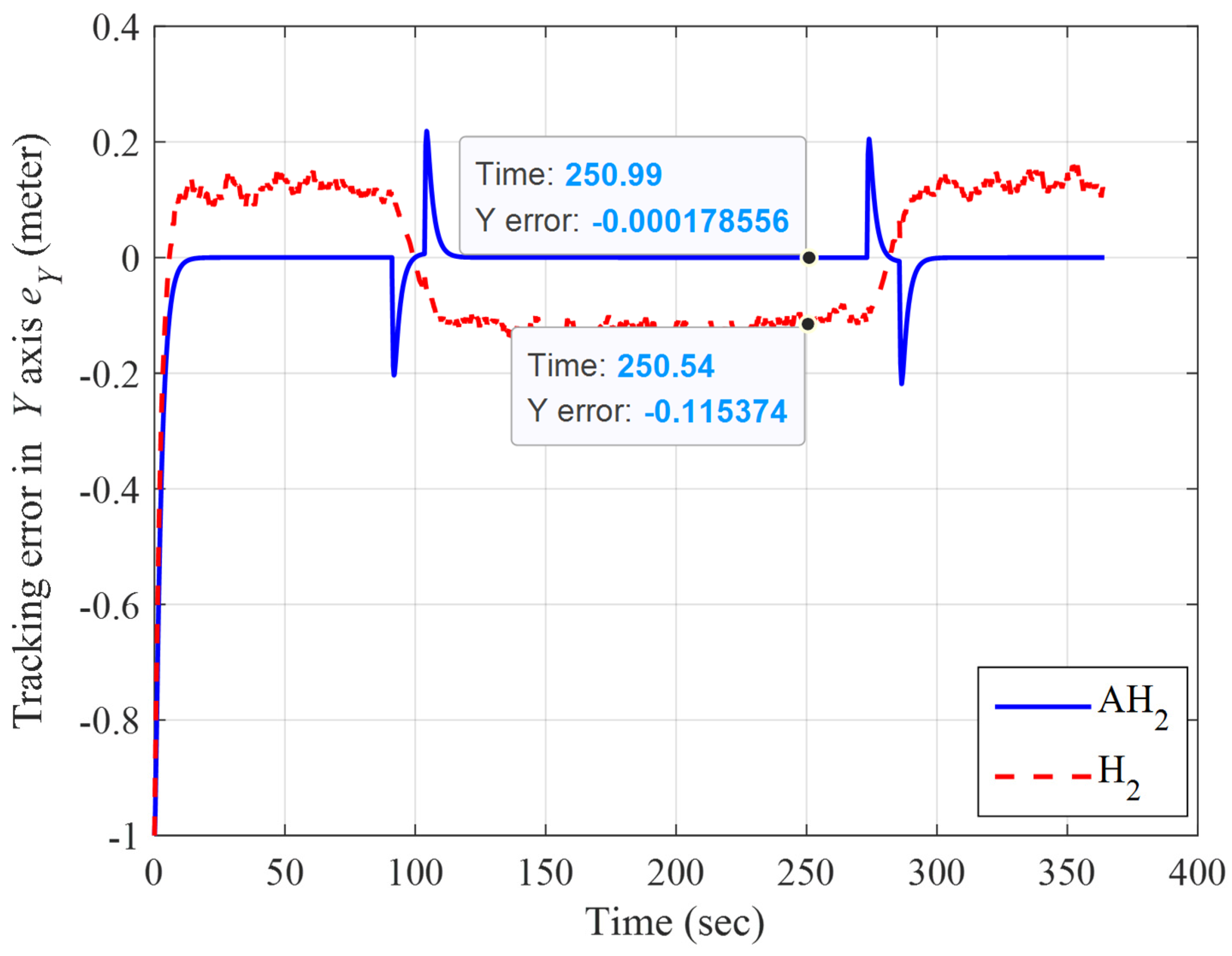
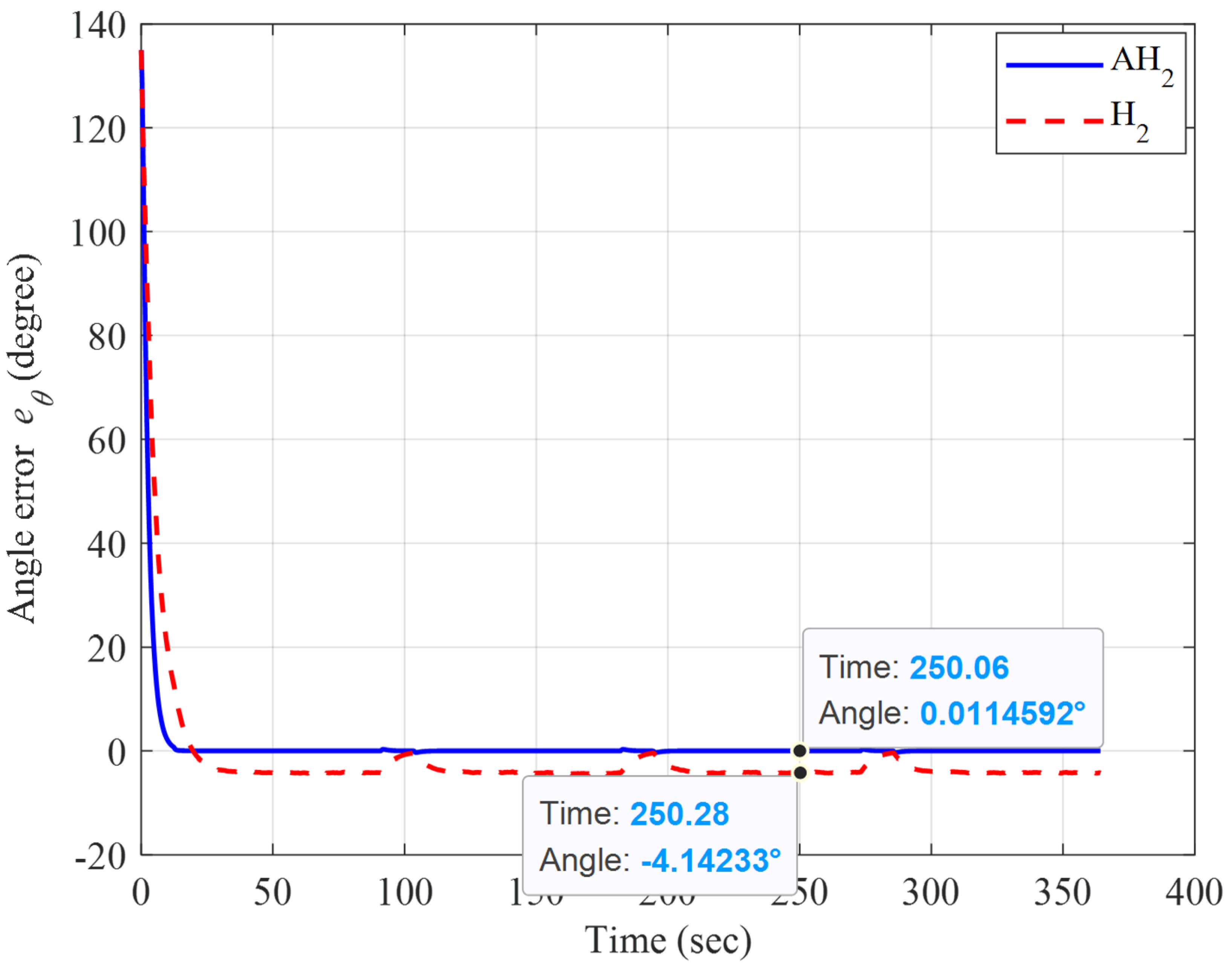
4.2. Simulation Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
References
- Ibari, B.; Benchikh, L.; Elhachimi, A.R.; Ahmed-Foitih, Z. Backstepping Approach for Autonomous Mobile Robot Trajectory Tracking. J. Elect. Eng. Comp. Sci. 2016, 2, 478–485. [Google Scholar]
- Mohammad, H.; Alireza, M. Trajectory Tracking Wheeled Mobile Robot Using Backstepping Method with Connection off Axle Trailer. Int. J. Smart Elect. Eng. 2018, 7, 177–187. [Google Scholar]
- Wu, X.; Jin, P.; Zou, T.; Qi, Z.; Xiao, H.; Lou, P. Backstepping Trajectory Tracking Based on Fuzzy Sliding Mode Control for Differential Mobile Robots. J. Intell. Robot. Syst. 2019, 96, 109–121. [Google Scholar] [CrossRef]
- Lu, E.; Ma, Z.; Li, Y.; Xu, L.; Tang, Z. Adaptive Backstepping Control of Tracked Robot Running Trajectory Based on Real-Time Slip Parameter Estimation. Int. J. Agric. Biol. Eng. 2020, 13, 178–187. [Google Scholar] [CrossRef]
- Niraj, K.G.; Prabin, K.P. Sliding Mode Controller Design for Trajectory Tracking of a Non-Holonomic Mobile Robot with Disturbance. Comput. Electr. Eng. 2018, 72, 307–323. [Google Scholar]
- Wang, G.; Zhou, C.; Yu, Y.; Liu, X. Adaptive Sliding Mode Trajectory Tracking Control for AMR Considering Skidding and Slipping via Extended State Observer. Energies 2019, 12, 3305. [Google Scholar] [CrossRef] [Green Version]
- Aquib, M.; Narendra, K.D.; Nishchal, K.V. Event-Triggered Sliding Mode Control for Trajectory Tracking of Nonlinear Systems. IEEE/CAA J. Autom. Sin. 2020, 7, 307–314. [Google Scholar]
- Li, J.; Wu, Q.; Wang, J.; Li, J. Neural Networks-Based Sliding Mode Tracking Control for the Four Wheel-Legged Robot Under Uncertain Interaction. Int. J. Robust Nonlinear Cont. 2021, 31, 4306–4323. [Google Scholar] [CrossRef]
- Taniguchi, T.; Sugeno, M. Trajectory Tracking Controls for Non-Holonomic Systems Using Dynamic Feedback Linearization Based on Piecewise Multi-Linear Models. J. Appl. Math. 2017, 47, 339–351. [Google Scholar]
- Chen, Y.Y.; Chen, Y.H.; Huang, C.Y. Autonomous Mobile Robot Design with Robustness Properties. Adv. Mech. Eng. 2018, 10, 1–11. [Google Scholar]
- Mahmoodabadi, M.J.; Nejadkourki, N. Trajectory Tracking of a Flexible Robot Manipulator by a New Optimized Fuzzy Adaptive Sliding Mode-Based Feedback Linearization Controller. J. Robot. 2020, 2020, 8813217. [Google Scholar] [CrossRef]
- Velagic, J.; Osmic, N.; Lacevic, B. Neural Network Controller for Mobile Robot Motion Control. Int. J. Intell. Syst. Tech. 2008, 47, 127–132. [Google Scholar]
- Pavol, B.; Yury, L.K.; Andrey, A.A.; Kirill, S.Y. Neural Network Control of a Wheeled Mobile Robot Based on Optimal Trajectories. Int. J. Adv. Robot. Sys. 2020, 17, 1729881420916077. [Google Scholar]
- Yu, J.; Su, Y.; Liao, Y. The Path Planning of Mobile Robot by Neural Networks and Hierarchical Reinforcement Learning. Fron. in Neur. 2020, 14, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Chen, Z.; Liu, Y.; He, W.; Qiao, H.; Ji, H. Adaptive-Neural-Network-Based Trajectory Tracking Control for a Nonholonomic Wheeled Mobile Robot with Velocity Constraints. IEEE Trans. Ind. Electron. 2021, 68, 5057–5067. [Google Scholar] [CrossRef]
- Wu, T.F.; Xu, Q.; Kan, J.; Chen, S.; Yan, S. Fuzzy PID Based Trajectory Tracking Control of Mobile Robot and its Simulation in Simulink. Int. J. Control. Autom. 2014, 7, 233–244. [Google Scholar]
- Chen, Y.H. A Novel Fuzzy Control Law for Nonholonomic Mobile Robots. Int. J. Comp. Intel. Cont. 2018, 5, 53–59. [Google Scholar]
- Tiep, D.K.; Lee, K.; Im, D.Y.; Kwak, B.; Ryoo, Y.J. Design of Fuzzy-PID Controller for Path Tracking of Mobile Robot with Differential Drive. Int. J. Fuzzy Log. Intell. Syst. 2018, 18, 220–228. [Google Scholar] [CrossRef]
- Hacene, N.; Mendil, B. Fuzzy Behavior-Based Control of Three Autonomous Omnidirectional Mobile Robot. Int. J. Autom. Comput. 2019, 16, 163–185. [Google Scholar] [CrossRef]
- Abdelwahab, M.; Parque, V. Trajectory Tracking of Autonomous Mobile Robots Using Z-Number Based Fuzzy Logic. IEEE Access 2020, 8, 18426–18441. [Google Scholar] [CrossRef]
- Huang, C.-J.; Chen, Y.-H.; Chao, C.-H.; Cheng, C.-F. A Fuzzy Control Design for the Trajectory Tracking of Autonomous Mobile Robot. Adv. Robot. Mech. Eng. 2020, 2, 206–211. [Google Scholar] [CrossRef]
- Du, Q.; Sha, L.; Shi, W.; Sun, L. Adaptive Fuzzy Path Tracking Control for Mobile Robots with Unknown Control Direction. Discret. Dyn. Nat. Soc. 2021, 2021, 9935271. [Google Scholar] [CrossRef]
- Dixon, W.E.; Dawson, D.M.; Zergeroglu, E.; Behal, A. Adaptive Tracking Control of a Wheeled Mobile Robot via an Uncalibrated Camera System. IEEE Trans. Syst. Man Cybern. Part B 2001, 31, 341–352. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, P.; Mitsutake, S.; Isoda, T.; Shi, T. Omni-Directional Robot and Adaptive Control Method for Off-Road Running. IEEE Trans. Robot. Autom. 2002, 18, 251–256. [Google Scholar] [CrossRef]
- Mohamed, S.; Yamada, A.; Sano, S.; Uchiyama, N. Design of a Redundant Autonomous Drive System for Energy Saving and Fail Safe Motion. Adv. Mech. Eng. 2016, 8, 1687814016676074. [Google Scholar] [CrossRef] [Green Version]
- Rigatos, G.; Busawon, K.; Pomares, J.; Abbaszadeh, M. Nonlinear Optimal Control for a Spherical Rolling Robot. Int. J. Intell. Robot. Appl. 2019, 3, 221–237. [Google Scholar] [CrossRef]
- Hu, Y.; Su, H.; Zhang, L.; Miao, S.; Chen, G.; Knoll, A. Nonlinear Model Predictive Control for Mobile Robot Using Varying-Parameter Convergent Differential Neural Network. Robotics 2019, 8, 64. [Google Scholar] [CrossRef] [Green Version]
- Rigatos, G.; Busawon, K.; Pomares, J.; Abbaszadeh, M. Nonlinear Optimal Control for the Wheeled Inverted Pendulum System. Robotica 2020, 38, 29–47. [Google Scholar] [CrossRef]
- Askhat, D.; Elena, S.; Ivan, Z. Optimal Control Problem Solution with Phase Constraints for Group of Robots by Pontryagin Maximum Principle and Evolutionary Algorithm. Mathematics 2020, 8, 2105. [Google Scholar]
- Mishra, S.K.; Jha, A.V.; Verma, V.K.; Appasani, B.; Abdelaziz, A.Y.; Bizon, N. An Optimized Triggering Algorithm for Event-Triggered Control of Networked Control Systems. Mathematics 2021, 9, 1262. [Google Scholar] [CrossRef]
- Chen, Y.H.; Li, T.H.S.; Chen, Y.Y. A Novel Nonlinear Control Law with Trajectory Tracking Capability for Mobile Robots: Closed-Form Solution Design. Appl. Math. Inf. Sci. 2013, 7, 749–754. [Google Scholar] [CrossRef]
- Chen, Y.H.; Lou, S.J. Control Design of a Swarm of Intelligent Robots: A Closed-Form H2 Nonlinear Control Approach. Appl. Sci. 2020, 10, 1055. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.H.; Chen, Y.Y.; Lou, S.J.; Huang, C.J. Energy Saving Control Approach for Trajectory Tracking of Autonomous Mobile Robots. Intell. Autom. Soft Comput. 2021, 30, 357–372. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Parameter | Value |
|---|---|---|
| AMR wheel radius | 6.5 (cm) | |
| AMR width | 35.6 (cm) | |
| Distance from P to c | 14 (cm) | |
| AMR mass | 10 (kg) | |
| AMR inertia | 10 (kg-m2) |
| Number of the Controlled AMR | Attitude | |
|---|---|---|
| #1 (Blue color) | (7,7) | |
| #2 (Green color) | (−7,7) | |
| #3 (Purple color) | (−7,−7) | |
| #4 (Red color) | (7,−7) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.-H.; Chen, Y.-Y. Trajectory Tracking Design for a Swarm of Autonomous Mobile Robots: A Nonlinear Adaptive Optimal Approach. Mathematics 2022, 10, 3901. https://doi.org/10.3390/math10203901
Chen Y-H, Chen Y-Y. Trajectory Tracking Design for a Swarm of Autonomous Mobile Robots: A Nonlinear Adaptive Optimal Approach. Mathematics. 2022; 10(20):3901. https://doi.org/10.3390/math10203901
Chicago/Turabian StyleChen, Yung-Hsiang, and Yung-Yue Chen. 2022. "Trajectory Tracking Design for a Swarm of Autonomous Mobile Robots: A Nonlinear Adaptive Optimal Approach" Mathematics 10, no. 20: 3901. https://doi.org/10.3390/math10203901