1. Introduction
During 1836–1837, Sturm and Liouville created a new subject in the mathematical analysis of second-order ordinary differential equations (ODEs) with the homogeneous Sturm–Liouville boundary conditions. It is known as the Sturm–Liouville theory nowadays, and deals with the Sturm–Liouville problem (SLP):
where
and
are strictly positive functions of
in a finite interval
and
is a constant parameter. The two-point boundary value problem (1) and (2) is a regular SLP that allows nontrivial solutions only for specific values of
, which are known as the eigenvalues. Only in a few cases can the eigenvalues be obtained analytically by solving algebraic equations; however, we do not even have explicit algebraic equations to solve
for most cases.
SLPs are essential in partial differential equations, vibrations in continuum mechanics, heat conduction problems, the Schrödinger equation, the transport of microwaves, the Lax pair of the Korteweg–De Vries equation, and fractional derivative problems [
1,
2,
3,
4], etc. Many numerical method, such as the residuals–collocation method [
5], Chebyshev collocation method [
6,
7], shooting method [
8], exponentially fitted Numerov method [
9], differential quadrature method [
10,
11], Sinc–Galerkin method [
12], Adomian decomposition method [
13], homotopy analysis method [
14], and variational iteration method [
15] have been developed in the past several decades to solve SLPs. These methods have been widely applied and efficient and accurate codes have been developed. On the other hand, the modified shooting methods were developed by Ghelardoni and Gheri [
16] and Liu [
17,
18]. Compared with the corrected Numerov’s method in recent years, competitive results have been obtained by applying symmetric boundary value methods [
19,
20] and using high-order difference schemes [
21].
This paper’s main focus was to develop the boundary shape function (BSF) to solve SLPs by automatically satisfying the boundary conditions. First, the idea of the boundary shape function proposed by Liu and Chang [
22] was applied to find the periodic solution of nonlinear jerk equations. Then, some problems such as the optimal control problems of nonlinear Duffing oscillators and the boundary value problem (BVP) with different boundary conditions were addressed by the BSF. New methods based on the BSF were developed to address the SLPs that were easy to formulate and implement. There are various numerical methods to approximate the eigenvalue and the corresponding eigenfunction. The present technique used the BSF to transform the SLP to the initial value problem (IVP), which was drastically different from the Lie-group shooting method developed by Liu [
17]. This new method did not need to find the missing initial values via the shooting technique; the difference will be pointed out below.
The paper is arranged as follows. Two main theorems are proven in
Section 2 for the SLP with the homogeneous Sturm–Liouville boundary conditions. Here, we developed two novel transformation methods to derive two canonical forms that transformed the general SLP to those with homogeneous Dirichlet and Neumann boundary conditions. In
Section 3, we transform the SLP with the Dirichlet boundary conditions to an IVP for a new variable, which guaranteed that the Dirichlet boundary conditions for
could be satisfied automatically. In the transformed IVP for
, an unknown constant
appeared that is yet to be determined. In
Section 4, we derive
in terms of the initial values for
and a normalized value
given in
for the uniqueness of the eigenfunction
, which could avoid the iteration to determine
. The numerical algorithm based on the boundary shape function method (BSFM) is developed in
Section 5. Numerical examples with the homogeneous Dirichlet boundary conditions are given in
Section 6 that verify the new results and algorithms. In
Section 7, the BSFM is derived to solve the SLP with the homogeneous Neumann boundary conditions. In
Section 8, several examples are given of homogeneous Sturm–Liouville boundary conditions. Finally, some conclusions are presented in
Section 9.
2. Sturm–Liouville Boundary Conditions
It is well known that the eigenvalues satisfy the relation:
and the eigenfunction corresponding to an eigenvalue
has
intersections with the
x-axis inside the interval
. Moreover, since for any given eigenvalue it is possible to compute an infinite number of eigenfunctions, in general, a normalization condition in the form
is required for the uniqueness of
. The computation of
and
traditionally has been quite a challenging task. We will show that inexpensive computing that evaluates
via a direct solution of the differential Equation (1) is feasible.
For the general SLP of Equations (1) and (2), we supposed that , , , and . We transformed them into two canonical forms with the Dirichlet and Neumann homogeneous boundary conditions, respectively, and then proposed a BSFM for determining the eigenvalues and finding the corresponding eigenfunctions.
2.1. Transforming to Neumann-Type Boundary Conditions
In Equations (1) and (2), suppose that and such that the coefficients preceding and can be set equal to one. When letting and , we may need to prove the following result.
Theorem 1. For the SLP with the Sturm–Liouville type boundary conditions:where λ is an eigen-parameter. If the following condition is satisfied:then Equations (4) and (5) can be transformed into the Neumann-type SLP: The relation between and is given as: Proof. It is apparent that the Neumann boundary conditions in Equation (8) follow from Equation (5) upon using the above equation. It follows from Equation (10) that:
If condition (6) holds, Equation (11) reduces to:
Thus,
in Equation (9) is proved. Inserting Equation (9) and its first and second differentials into Equation (4), we can derive:
which, when multiplied by
on both sides, can lead to Equation (7). □
Motivated by Theorem 1, we generalized it to the Sturm–Liouville type boundary conditions without needing the constraint
. For this purpose, we sought a function
in:
so that the Sturm–Liouville type boundary conditions in Equation (5) with
and
were transformed to:
Through some manipulations, we can derive:
Theorem 2. The SLP (4) and (5) with and in the Sturm–Liouville boundary conditions can be transformed to the Neumann-type boundary conditions:where the relation between and is given by Equation (14) and is given by Equations (17) or (18). Proof. The Neumann boundary conditions in Equation (20) are given by Equations (15) and (16). By inserting Equation (14) and its first differential into Equation (4), we can derive:
When Equation (21) is divided by
on both sides and use:
we can change it to:
The expansion of the second term generates Equation (19). □
Note that Niessen and Zettl [
23] developed a similar transformation (
), where
is a solution of Equation (1) for some
. The purpose was to transform the singular SLP with a singular nonoscillatory limit circle endpoint into a regular one. However, the present
in Equations (17) and (18) was different from the
used in [
23].
2.2. Transforming to Dirichlet-Type Boundary Conditions
This is similar to Theorem 2 in that we can derive the following result:
Theorem 3. The SLP in Equations (4) and (5) can be transformed to the Dirichlet-type SLP:where: Proof. By letting:
where
and
, we transform Equations (4) and (5) into the canonical forms of (23) and (24). It is easy to confirm that
in Equation (26) satisfies Equation (24) when
satisfies Equation (5).
For easy operations,
in Equation (26) is written as:
where:
When taking the derivative of Equation (27) with respect to
, we get:
where for simplicity we omit the variable
in the functions, and:
is a constant. Inserting Equation (4) for
into Equation (29) leads to:
Using Equations (27) and (31),
and
in terms of
and
can be solved as follows:
where:
Further, when taking the derivative of Equation (33) with respect to
and using Equation (4) for
again, we get:
The latter equation can be written as:
which, upon using Equations (34) and (32) for
, can be arranged as:
Thus, we prove Equation (23). □
3. Transforming to an Initial Value Problem for z(x)
To clearly demonstrate the new BSFM, we began with the SLP with the homogeneous Dirichlet boundary conditions:
where
and
with
and
.
In view of Equations (40) and (41), if
is an eigenfunction, then
is also an eigenfunction. For the uniqueness of
, we considered a normalization condition as follows:
where
is a given nonzero constant. Equation (42) is more straightforward than the usual normalization condition
. According to the theory of ODE, the solution of
that satisfies Equation (40) with the initial conditions
and
is unique.
To guarantee that the solution of
could exactly satisfy Equation (41), we introduced a shape function:
As a consequence, we could prove the following result:
Theorem 4. For the function satisfies Equation (41). Proof. Inserting
into Equation (44) leads to:
by Equation (43), which becomes:
Similarly, inserting
into Equation (44) yields:
which, in view of Equation (43), becomes:
Thus, we complete the proof. □
Theorem 4 is crucial in that the newly introduced shape function method guaranteed that the boundary conditions in Equation (41) could be exactly satisfied by
in Equation (44). Corresponding to the shape function
was called a boundary shape function since it automatically satisfied the boundary conditions (41). Starting from this new idea, we could develop a BSFM to solve Equations (40) and (41) by considering the relation between
and
:
where:
by substituting Equation (43) for
. Due to
and
, Equation (45) implies
for automatically satisfying Equation (41).
Hence, Equation (40), after inserting Equation (45) for
, could be transformed to
which can be viewed as an IVP for
in the interval
upon giving the initial values
and
definitely.
4. Finding the Terminal Value of z(x)
However, in the function given by Equation (46) is an unknown constant. For Equations (47) and (48) to be the IVP, we had to ensure that was not an unknown constant, which was proved as follows:
Theorem 5. In Equation (46), is given by: Moreover, we have:where and are, respectively, the particular and homogeneous solutions of Equation (47). Proof. Taking the differential of Equation (45) with respect to
and inserting
leads to:
where
is a constant due to Equation (46); from Equation (48), it follows that:
When substituting Equation (52) for
as shown in Equation (42) and Equation (48) for
in Equation (51), we get:
hence, Equation (49) is proven.
Equation (47) is a nonhomogeneous ODE for
. We could decompose
into:
where
and
are the homogeneous and particular solutions of Equation (47), respectively. The latter means that
satisfied the nonhomogeneous part of Equation (47):
which by observation immediately implied the first result in Equation (50). Inserting Equation (54) into Equation (45) and using
yields:
Thus, we end the proof. □
The derivation of Equation (49) for was independent of the governing Equation (4), which meant that the current method of BSFM was applicable to more general eigenvalue problems rather than Equation (4); for instance, nonlinear eigenvalue problems.
5. Algorithm to Solve Eigenvalues and Eigenfunctions
We have proved the two main Theorems, 4 and 5, which could help us efficiently compute the eigenvalues. The result in Theorem 5 was very important because we could avoid the iteration to determine
. Upon letting
it follows from Equation (47) that:
where the initial condition
for
is based on Equations (49), (52), and (58):
In Equations (58) and (59),
and
are derived from Equations (46), (48), (49), and (52):
Because the initial values
and
in Equation (60) were available, now, from
to
, we could apply the fourth-order Runge–Kutta method (RK4) to integrate the first-order ODEs (58) and (59) with a given
to obtain
; hence:
could be obtained for each
given. For use in the latter, we called the curve of
versus
an
eigenvalue curve, where
was a target function and
was an eigen-parameter. We could adjust the value of
until
satisfied
, where
is a given tolerant error to mismatch the right-boundary condition
.
The algorithm based on the BSFM for solving the SLP with the homogeneous Dirichlet boundary conditions can be summarized as follows:
- (i)
Give the stopping criterion with given, and initial guess .
- (ii)
For applying the RK4 to integrate the ODEs in Equations (58)–(60) with steps from to . Take:
where
is an implicit function of
; then, we employed the fictitious time integration method (FTIM) [
24] to compute the next step value:
where
is a fictitious time; if
rendered:
then we could find an eigenvalue inside an interval in which we were interested. We could obtain all eigenvalues sequentially by changing the interval and going to (ii). In (i), the initial guess
could be observed in the data of the eigenvalue curve.
A more straightforward method to determine
is to use a finer tuning technique (FTT). Let
run in an interval
including the eigenvalues of interest, from which the zero points inside that interval can be detected from the plot of
versus
. We could tune the interval to a finer one by gradually reducing the length of the interval
to locate the minimum of:
until the minimum was smaller than
. At this moment, we could precisely find the eigenvalue inside that interval.
We can confirm that the initial values of
and
are:
The first one was already proved in Theorem 4. Based on Equations (45), (46), (49), and (52), it followed that:
Suppose one wants to solve the corresponding eigenfunction for an eigenvalue λ obtained. In that case, one can employ the initial values in Equation (68) and integrate Equation (40) after inserting the obtained eigenvalue to solve the eigenfunction.
Remark 1. Because Equation (59) involves as an unknown value, the integrated value is indeed an implicit function of . By meeting the right boundary condition for , an algebraic equation can be used to determine the eigenvalue , which can be performed by a numerical method based on FTIM [24]. The readers may ask why we did not directly integrate Equation (40) by using the initial values with the guessed and the guessed eigenvalue to match the right boundary condition to pick up the correct eigenvalue. However, this approach cannot guarantee that the right boundary condition can be exactly satisfied, which may render an unstable and incorrect solution. We will give an example to demonstrate the failure of this naive approach in the shooting method. We instead integrated using Equations (58)–(60) in the BSFM, which guaranteed that the right boundary condition could be satisfied automatically as proved in Theorem 4. From this aspect, the BSFM was quite different from the shooting method, where the correct value was not known in advance, and even Equation (40) was integrated by using the correct initial values while the end value was not guaranteed to satisfy the right-end condition For the general SLPs (4) and (5), the boundary conditions of which were not of the Dirichlet type, we could employ Theorem 3 to transform them into Equations (23) and (24). Then, after using the above BSFM to determine , and , we could determine the eigenfunction using Equation (32).
7. Neumann-Type Boundary Conditions
The simplest eigenvalue problem with an eigenfunction satisfying the Neumann boundary conditions is:
the eigenvalues of which are
,
.
7.1. Variable Transformation
In this section, we considered Equation (40) with the following homogeneous Neumann boundary conditions:
For the SLP with the homogeneous Neumann boundary conditions, we considered another normalization condition:
According to the theory of ODE, the nontrivial solution of satisfying Equation (40) with the initial conditions and is unique.
We can derive:
where
is a given constant, so that:
Theorem 6. For the function :
satisfies Equation (77). Proof. Taking the differential of Equation (82) with respect to
x and inserting
leads to:
which, when using Equations (79) and (80), becomes:
When inserting
into the differential of Equation (82), we get:
which, when using Equations (79) and (80), becomes:
Thus, the proof is completed. □
Consider the variable transformation from
to
by:
where:
Using Equation (83), we can transform Equation (40) into:
where
and
are constant initial values.
Theorem 7. In Equation (84), is given as:
where the constraint of is given by Equation (81) with ; we take for some nonzero constant .
Proof. Inserting
into Equation (83) leads to:
On the other hand, it follows from Equations (79)–(81), (84), and (86) that:
By substituting
with Equation (78) and
with Equation (86) in Equation (88), we get:
Hence, Equation (87) is proved. □
7.2. Algorithm Based on the BSFM
The latter condition could be proved as follows. After taking the differential of Equation (85), inserting
, and using Equations (79) and (80), we could obtain
. Inserting
into Equation (91) and using
yielded
. Then, we could apply the RK4 to integrate the above ODEs to obtain:
The algorithm based on the BSFM for solving the SLP with the homogeneous Neumann boundary conditions can be summarized as follows:
- (i)
Give the stopping criterion , with given, and initial guess .
- (ii)
For , applying the RK4 to integrate the ODEs in Equations (91)–(93) with steps from to . Take:
employ the FTIM [
24] to obtain:
and if
renders:
then we can find an eigenvalue inside an interval; we can then obtain all eigenvalues sequentially by changing the interval and going to (ii).
A more straightforward method to determine
is to use an FTT. Let
,
run in an interval
, including the eigenvalues, from which the zero points inside that interval can be detected from the plot of
versus
. We could tune the interval to a finer one to locate the minimum of:
until the minimum was smaller than
.
Suppose one wants to solve the corresponding eigenfunction for an eigenvalue λ obtained. In that case, one can employ the initial values and and integrate Equation (40) with the obtained eigenvalue to solve the corresponding eigenfunction.
For the general SLP (4) and (5), the boundary conditions of which were not the Neumann type, we could employ Theorem 1 or Theorem 2 to transform them into Equations (7) and (8) or Equations (19) and (20). Then, after using the above BSFM to determine and , we could determine the eigenfunction using Equation (9) or Equation (14).
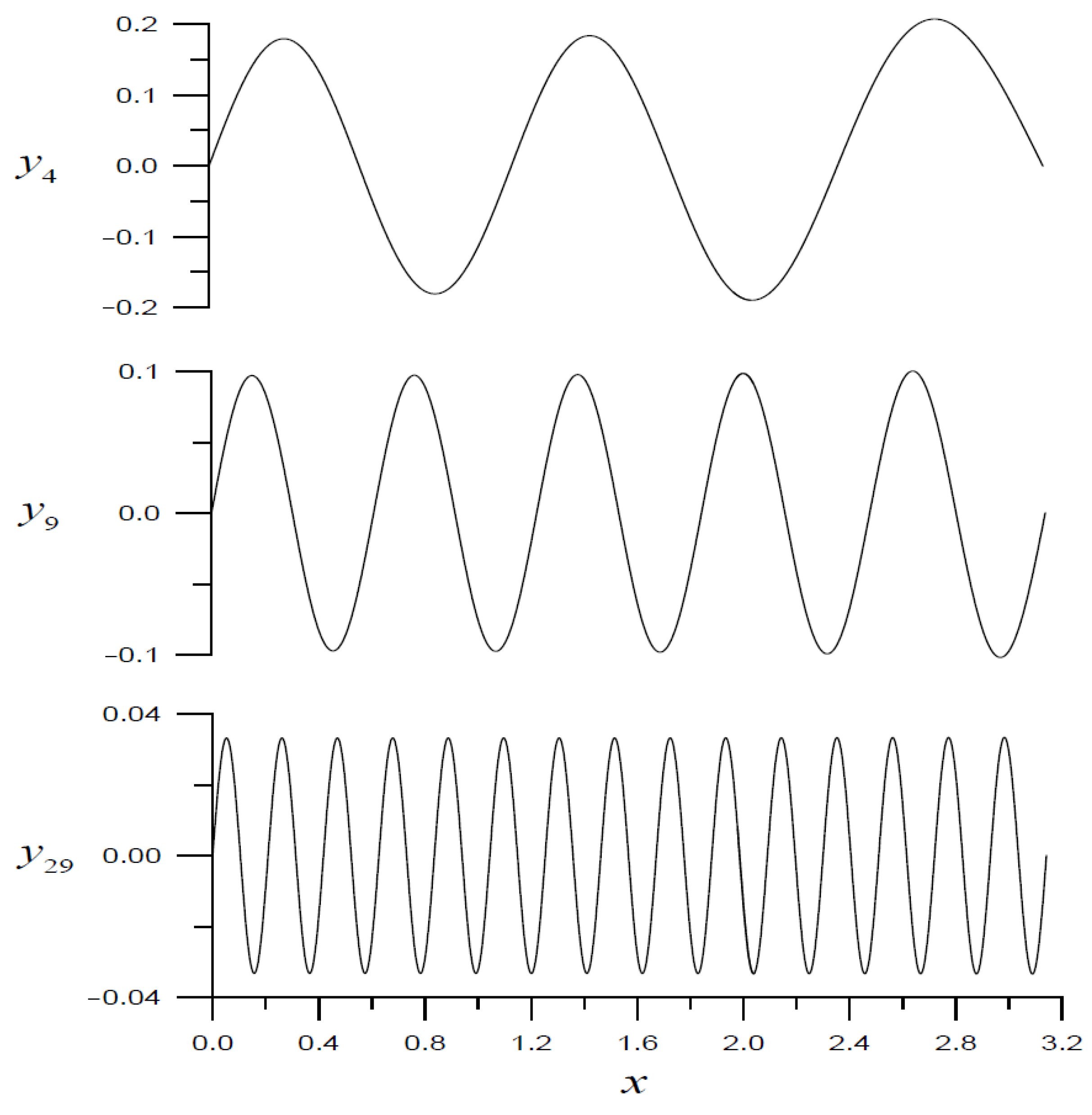
7.3. Example 4
We tested the BSFM for the eigenfunction in Equation (76), which had the eigenvalues
. We applied the BSFM in
Section 7.2 to solve this problem with
or
,
,
, and
. By tuning to finer intervals, we compared the computed eigenvalues to the exact ones for
as shown in
Table 4. It can be seen that the numerical errors were minimal (on the order of
to
) no matter which value of
or
was used.
8. Numerical Examples of the General Sturm–Liouville Problem
For the general SLP, we could either transform it into the Neumann-type SLP as shown in Theorems 1 and 2 or the Dirichlet-type SLP as shown in Theorem 3. Some examples are given below.
8.1. Example 5
The following example was borrowed from Fu et al. [
26]:
where
is a nonzero parameter. This problem had the eigenvalues
, but we did not have closed-form solutions for the eigenfunctions.
In Equations (99) and (100),
,
,
, and
; hence, condition (6) in Theorem 1 held. Now, according to Theorem 1, the problem (99) and (100) was reduced to:
where
and
Then, we could apply the BSFM in
Section 7.2 to solve this problem with
,
,
, and
.
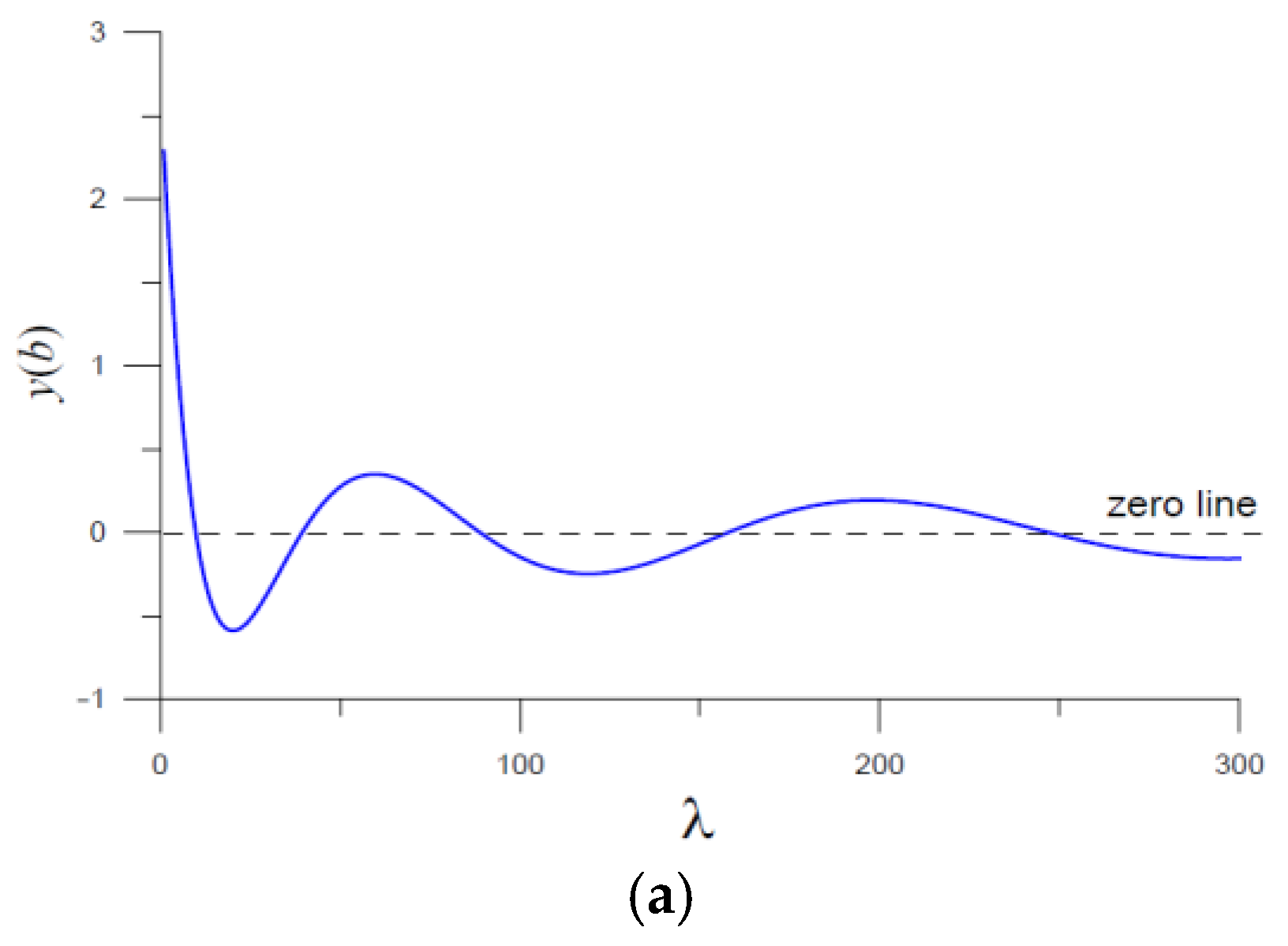
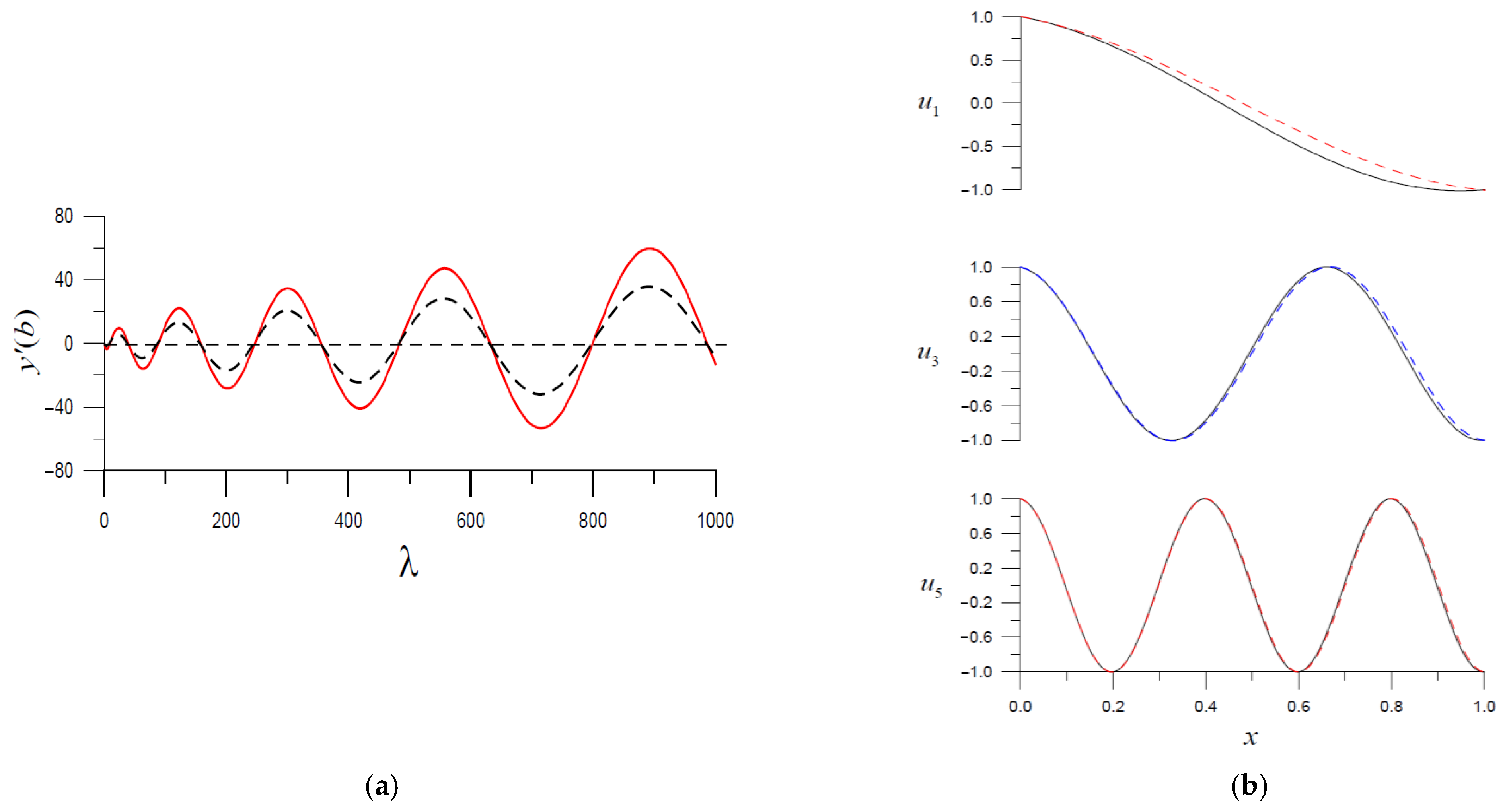
Figure 5a shows a plot of the eigenvalue curve of
versus
in an interval [1, 1000] as a solid line, from which we can see that there were 10 zero points that corresponded to the first 10 eigenvalues
,
.
By using the FTT and the FTIM, we compared the calculated eigenvalues to the exact ones for
in
Table 5. It can be seen that the numerical errors were minimal—on the order of
to
when using the FTT and
to
when using the FTIM.
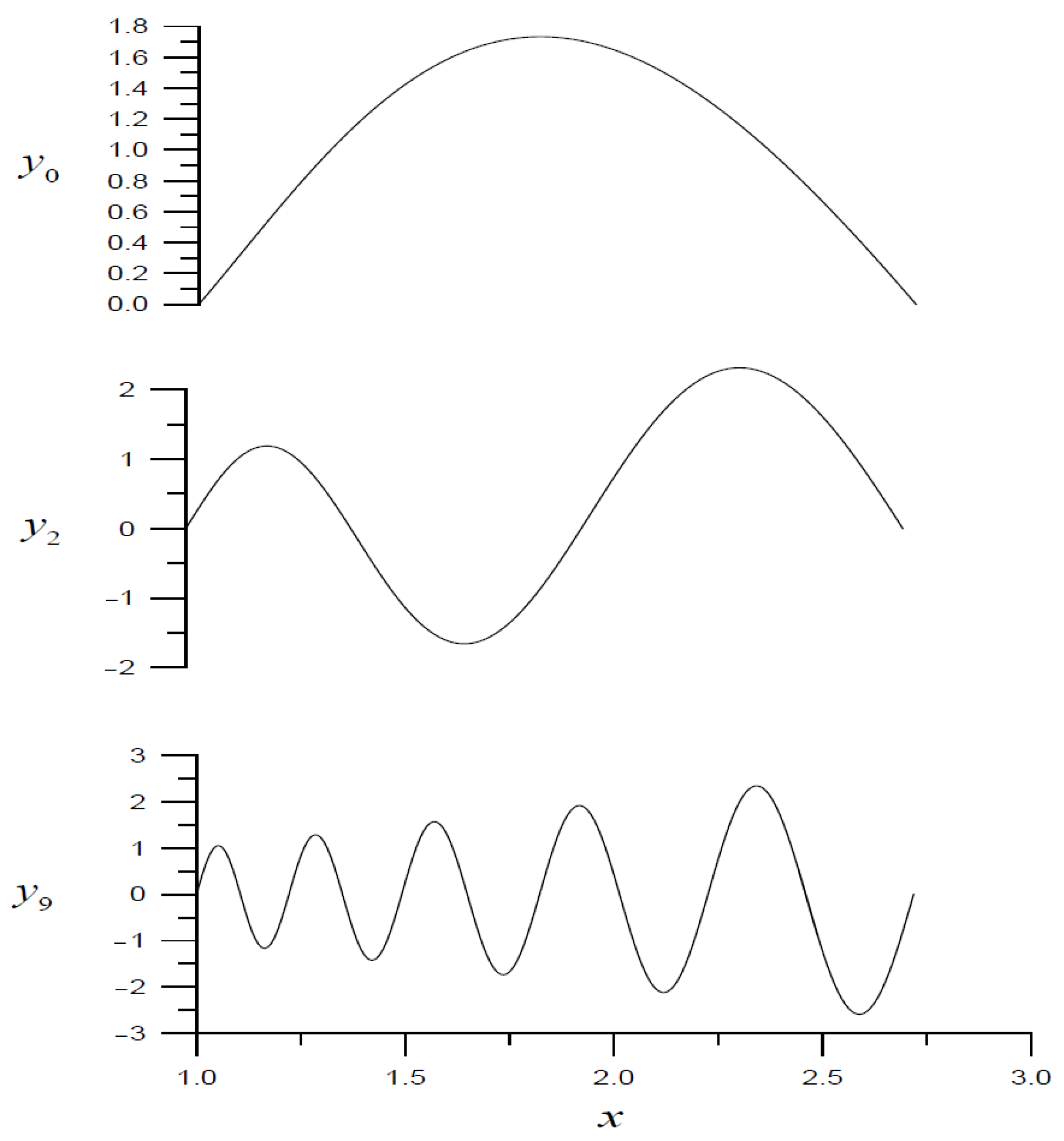
By tuning to finer intervals when using the FTT and applying the BSFM with
or
,
,
,
, and
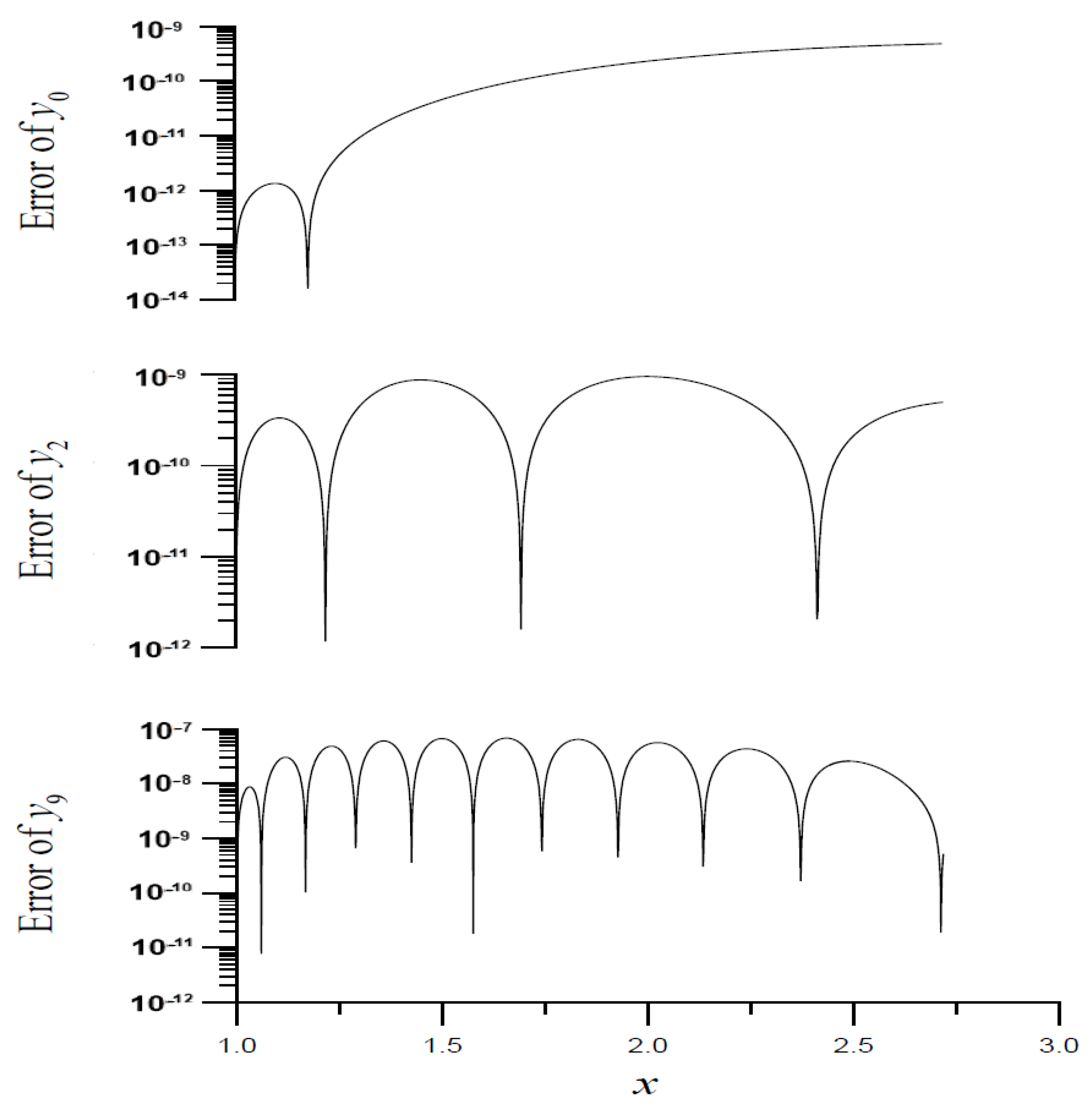
, we could sequentially obtain the required eigenvalues; the calculated eigenfunctions for
are shown in
Figure 5b as solid lines. It can be seen that the numerical errors were minimal (on the order of
to
to satisfy the right boundary condition
where we took
.
8.2. Example 6
At this moment, we solved the general SLP (1) and (2) by using Theorem 2 and the BSFM in
Section 7.2. To test the accuracy, we considered:
where
were solved using
; while the eigenfunctions were given by
.
For Example 5, we showed that using the FTT was more accurate than using the FTIM. We used the FTT to adjust the eigenvalues for the following examples. We applied the BSFM in
Section 7.2 to solve this problem with
or
,
,
,
, and
. By tuning to finer intervals using the FTT, we compared the calculated eigenvalues to the exact ones for
in
Table 6. It can be seen that the numerical errors were very small, on the order of
to
.
8.3. Example 7
We considered Example 5 again; however, we used a different right boundary condition:
We employed Theorem 2 and applied the BSFM in
Section 7.2 to solve this problem with
,
,
,
, and
.
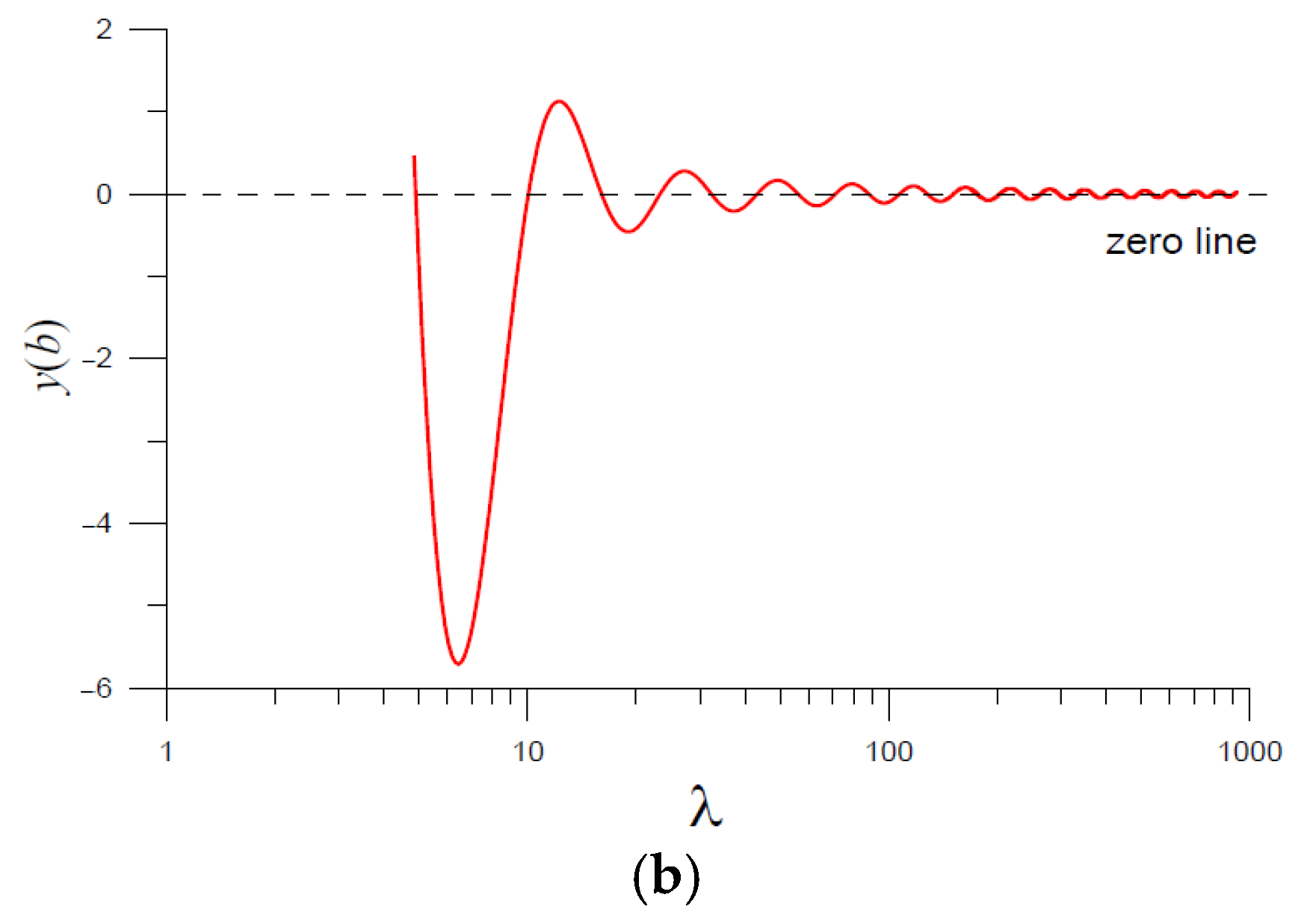
Figure 5a shows a plot of the eigenvalue curve of
versus
by the dashed line in an interval
, from which we can see that there were 10 zero points that were close to the first 10 eigenvalues of Example 5. However, there were a few differences as shown in
Table 5. The numerical errors of the eigenvalues were adjusted to be less than
.
By tuning to finer intervals using the FTT and applying the BSFM in
Section 7.2 with
,
,
, and
, we could sequentially solve for the required eigenvalues; the calculated eigenfunctions for
are shown by the dashed lines in
Figure 5b. The right boundary condition
could be satisfied very well, as shown in
Table 7.
8.4. Example 8
Now, we solved the general SLP (1) and (2) by using Theorem 3 and the BSFM in
Section 5. We tested the following problem given in Example 5:
where
and
This problem had the eigenvalues
,
.
We applied the present BSFM based on Theorem 3 to solve this problem with
,
,
,
, and
. By tuning to finer intervals using the FTT, the calculated eigenvalues were compared with the exact ones for
,
in
Table 8. As shown in the table, the numerical errors were on the order of
to
.
Remark 3. The Liouville transformation [26]:can transform Equations (1) and (2) to the following canonical form:where: The original SLP became a new SLP in the unit interval with the same eigenvalues multiplied by a constant factor and only the potential function was required.
Upon comparing the transform in Equation (109) to that in Equation (14), we could observe the similarity. However, was an explicit quadratic or cubic function of ; all the coefficient functions were given explicitly in Equation (19). Moreover, the boundary conditions were more accessible to treat than Equation (112). One major drawback of Equation (111) was that the coefficient function was an implicit function of , which could be known only after inverting the relation in Equation (110) to obtain the function and then inserting it into Equation (113).
Both the transformations in Equations (14) and (109) were congruent, which maintained the linearity in the eigenvalue or . On the other hand, the transform (25) in Theorem 3 was not a congruent one, where the coefficient function is a linear function of and is a nonlinear function of . Nevertheless, from the aspect of the numerical method, the Dirichlet boundary conditions in Equation (24) were more uncomplicated and were easier to treat than the boundary conditions (20) and (112).
The SLP is very important in partial differential equations, vibrations in continuum mechanics, and heat conduction problems. We applied the Sturm–Liouville theory to solve the longitudinal wave motion problem when the Young’s modulus
was fixed with the cross section area
of a tapered rod, a constant density
of mass, and the axial displacement
:
Let
with
as a natural vibration frequency; Equation (116) then reduces to Equation (4) with:
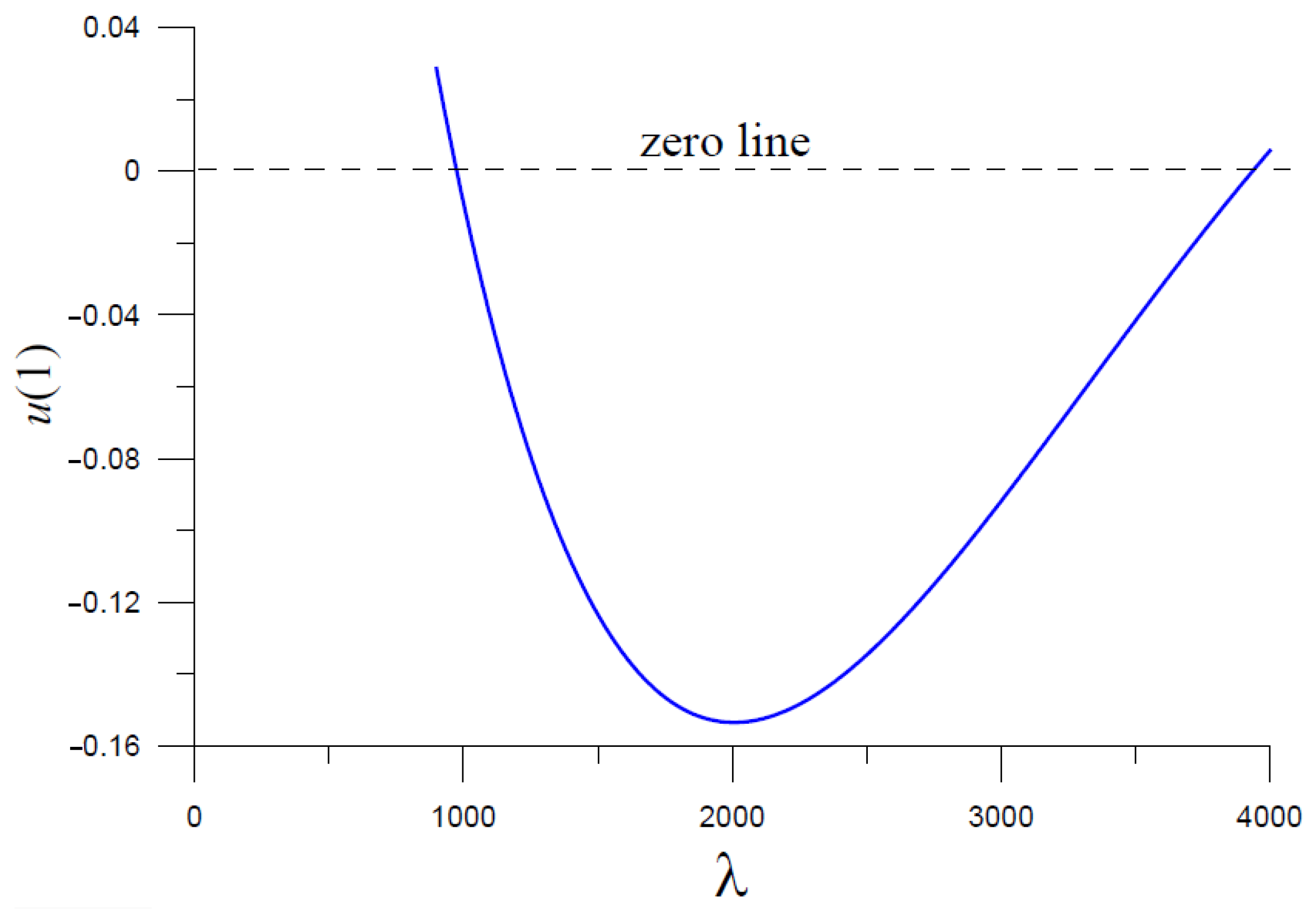
We fixed the length of the rod be a unit and took = 100.
In the design of engineering structures, knowing first few frequencies
is of utmost importance.
Figure 6 shows a plot of
versus
in a range of
, where two intersecting points appeared. Then, by tuning to finer intervals, we could obtain
and
.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}