
A Linear-Active-Disturbance-Rejection-Based Vertical Takeoff and Acceleration Strategy with Simplified Vehicle Operations for Electric Vertical Takeoff and Landing Vehicles

Abstract
:1. Introduction
- The introduction of the 6-DOF modeling and the platform for the protype eVTOL-ET120.
- The defined SVO stick response and the corresponding LADRC-based control architecture design.
- The takeoff and acceleration strategy design and Monte Carlo simulations for robustness verification.
2. Platform Modeling
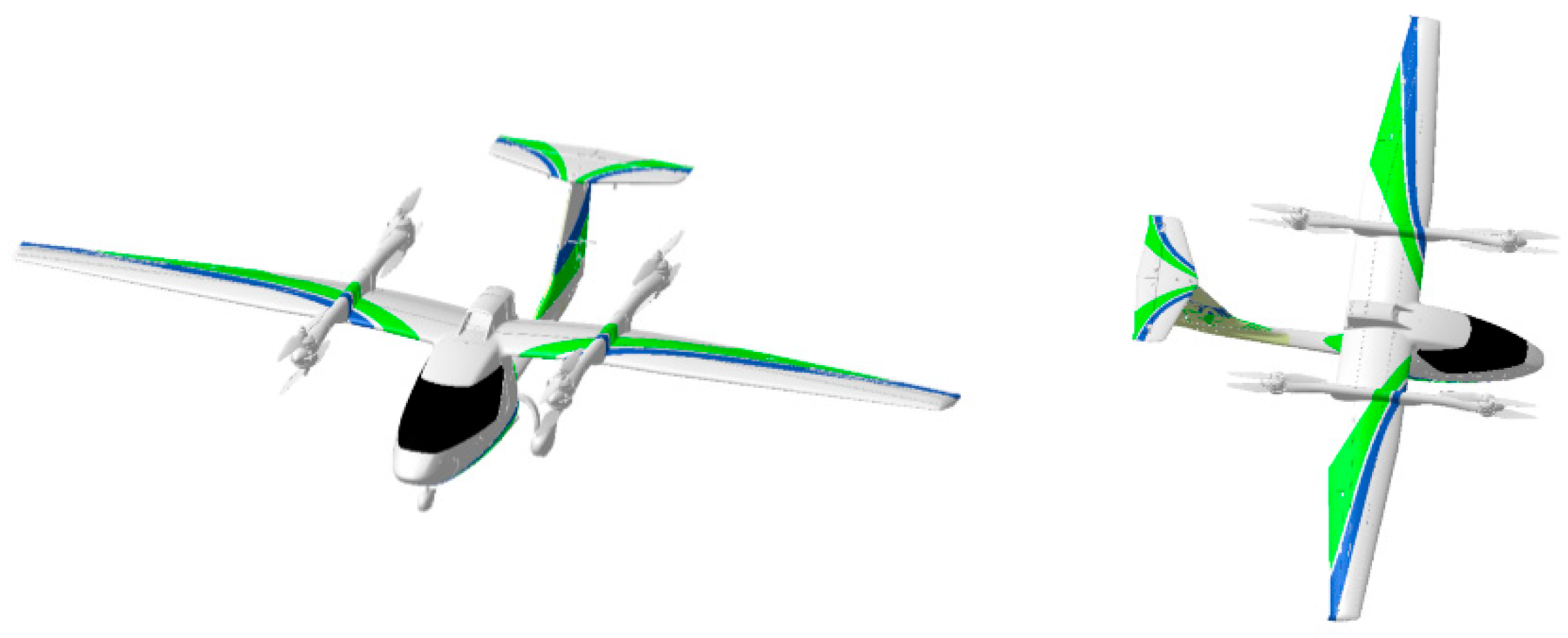
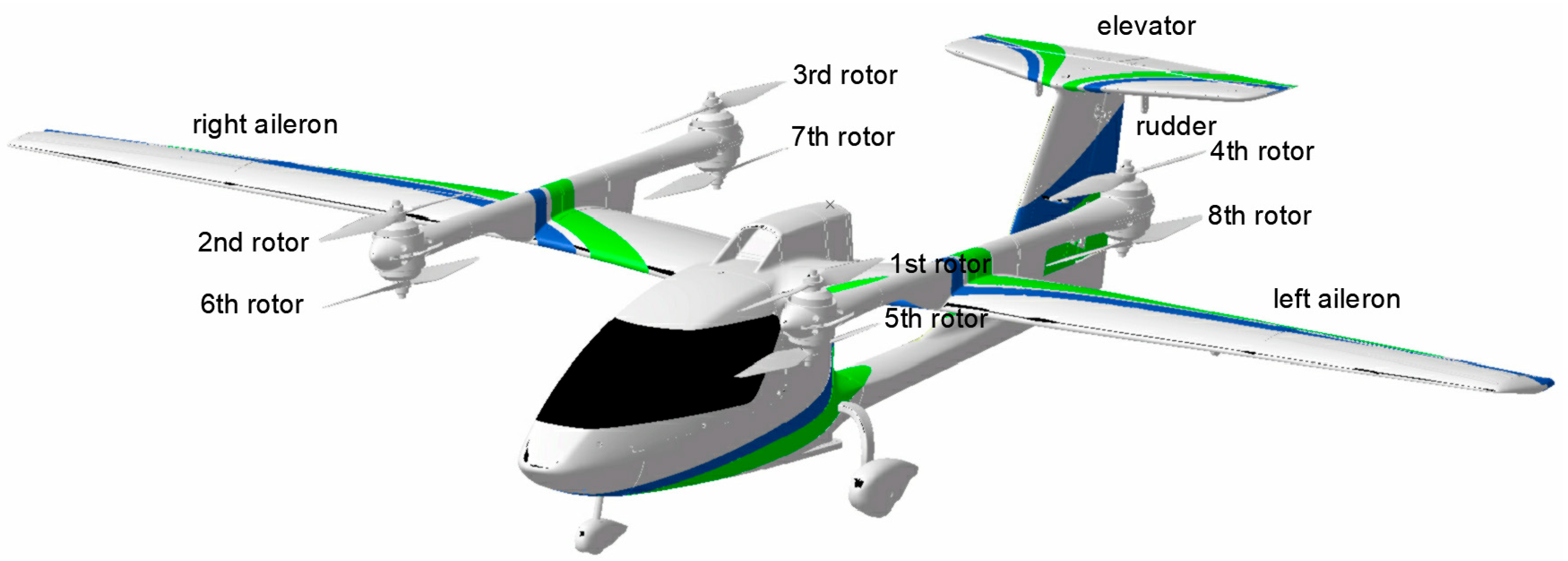
2.1. Platform Design and Operating Principle
- (1)
- In the hover mode, no additional trimming torque is required, because the acting point of the resultant lift is located at the center of gravity (CG).
- (2)
- The redundant design of the rotor power system enables the aircraft to have emergency landing capability in the case of a single rotor failure.
- (3)
- The rotor power system is electric, green, environmentally friendly and sustainable.
- (4)
- The high T-tail layout reduces the aerodynamic interference of the rotor to the elevator.
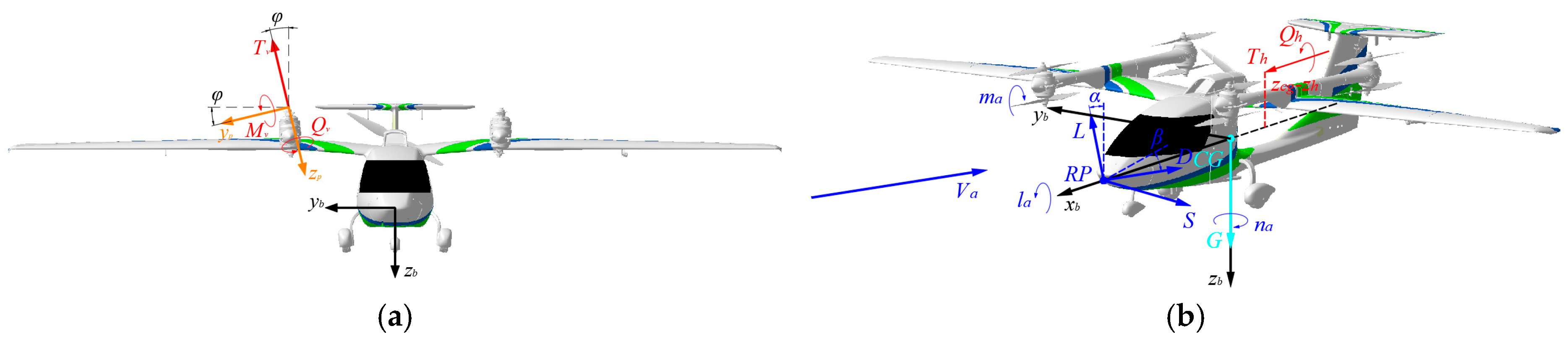
2.2. Aircraft Dynamics Modeling
2.2.1. Aerodynamic Model
2.2.2. Analysis of Force and 6-DOF Functions
3. Control Logic
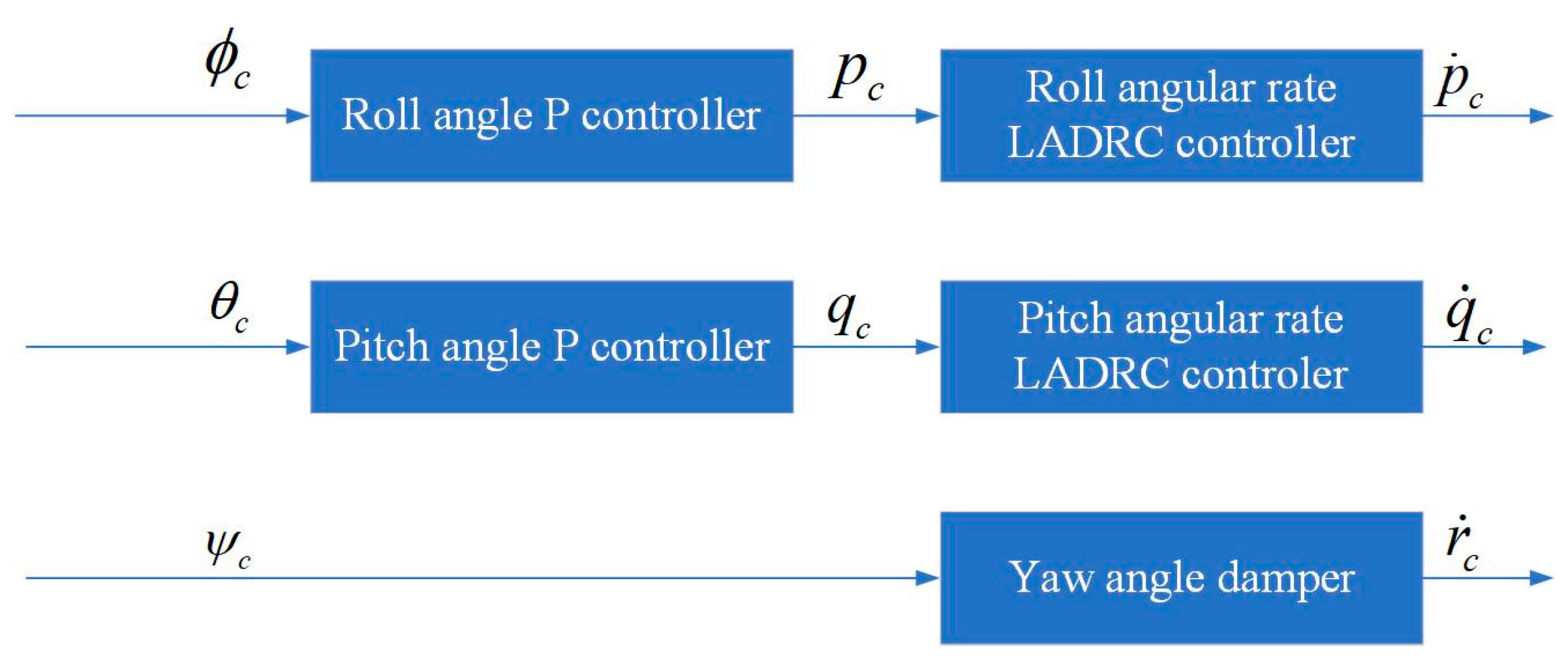
3.1. Stability Augmentation System
3.1.1. LADRC Angular Rate Controller
3.1.2. Attitude Stabilizer
3.1.3. Control Allocator
3.1.4. Control Parameter Design
3.2. Simplified Vehicle Operation
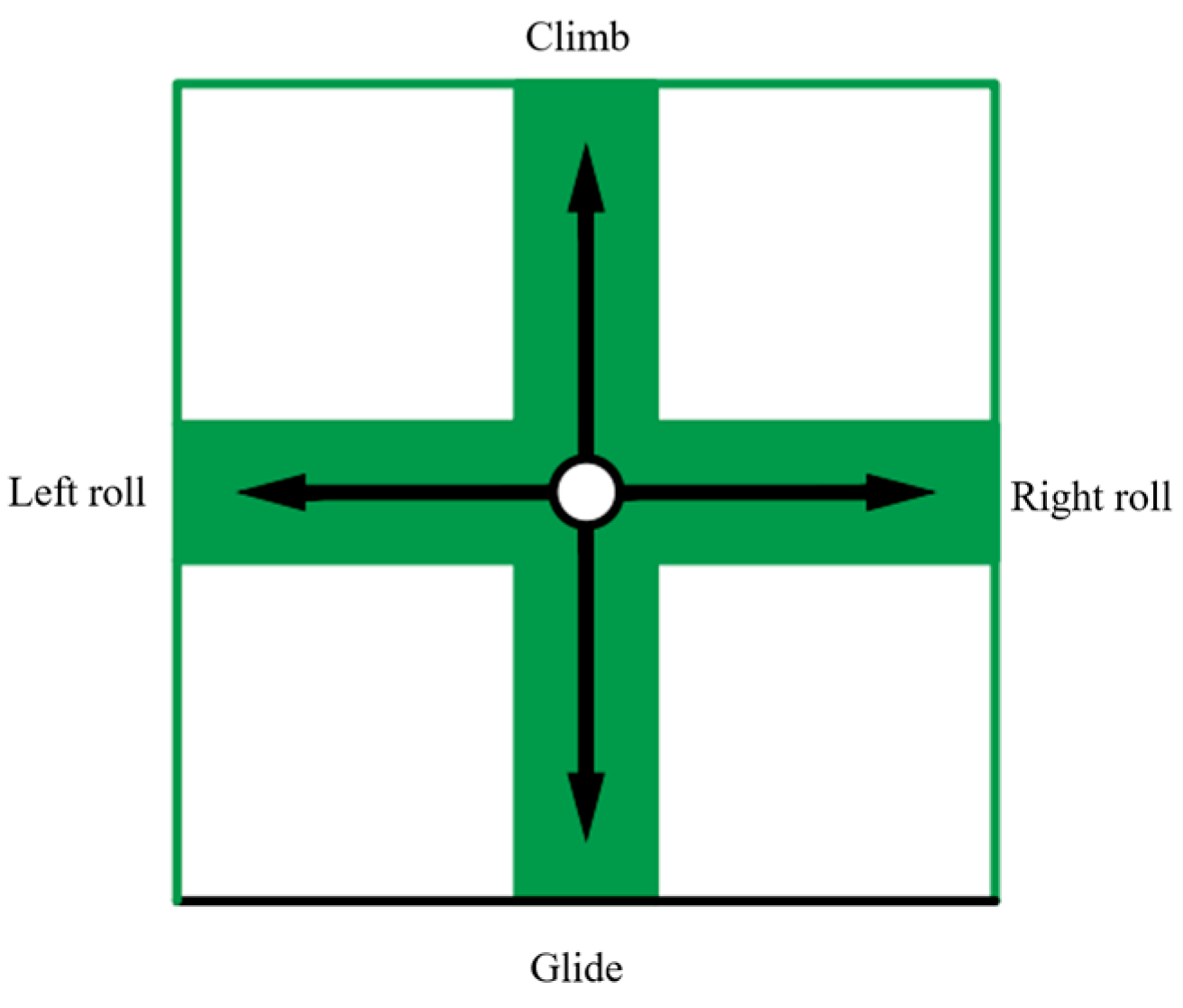
3.2.1. Stick Definition
- The control stick response design
- The speed stick response design
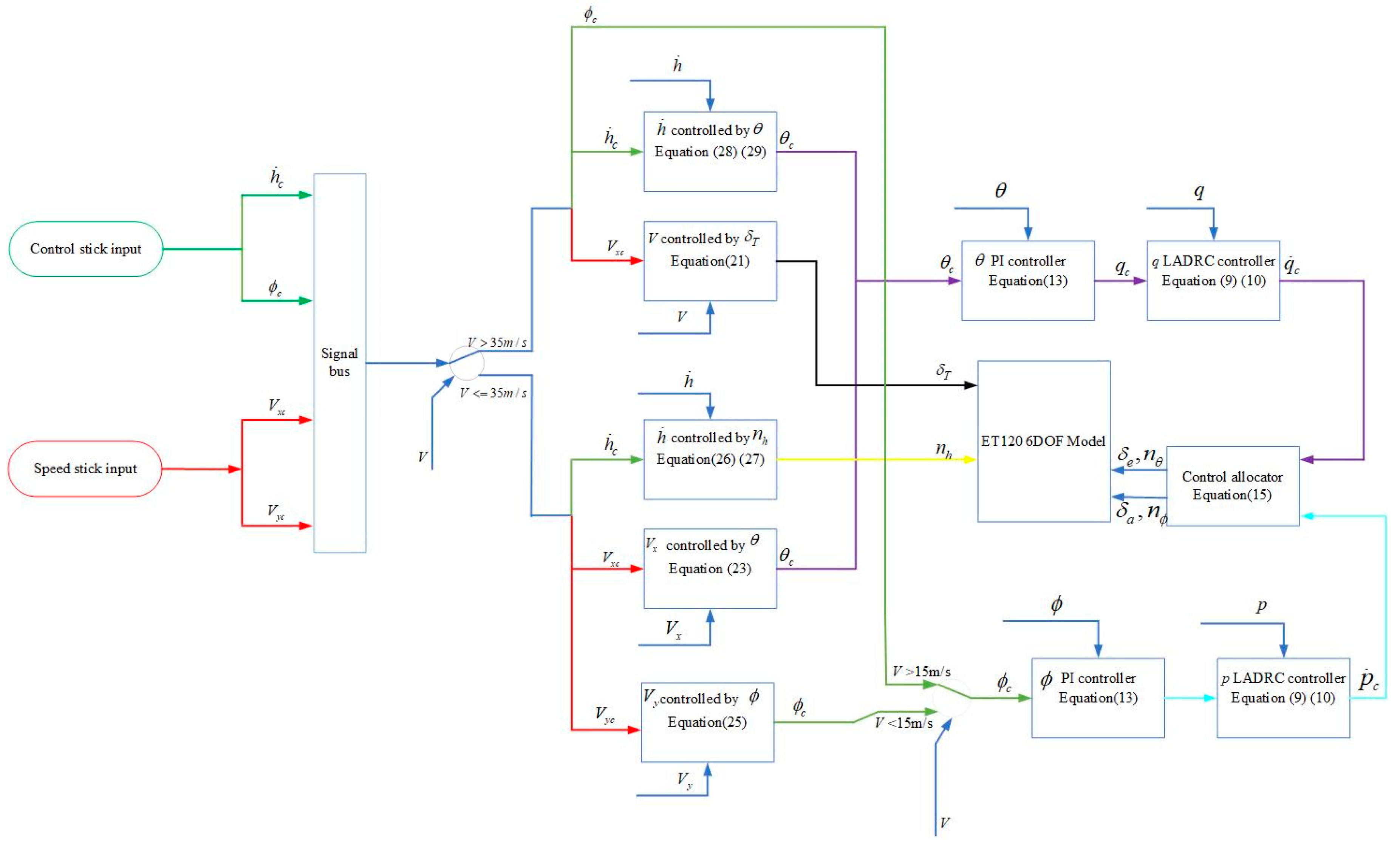
3.2.2. SVO Control Architecture
- Airspeed control
- rate of climb control
4. Takeoff and Acceleration Strategy
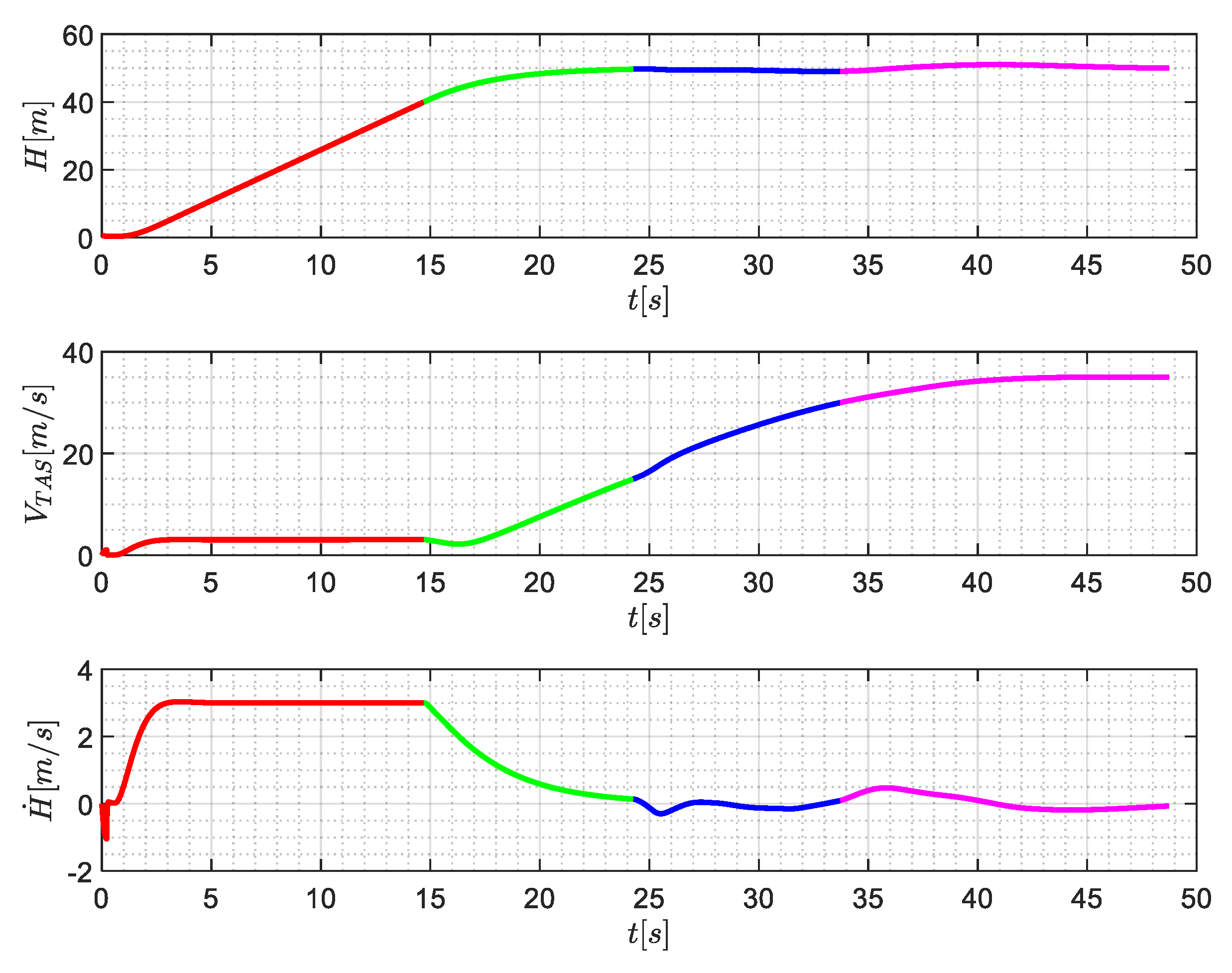
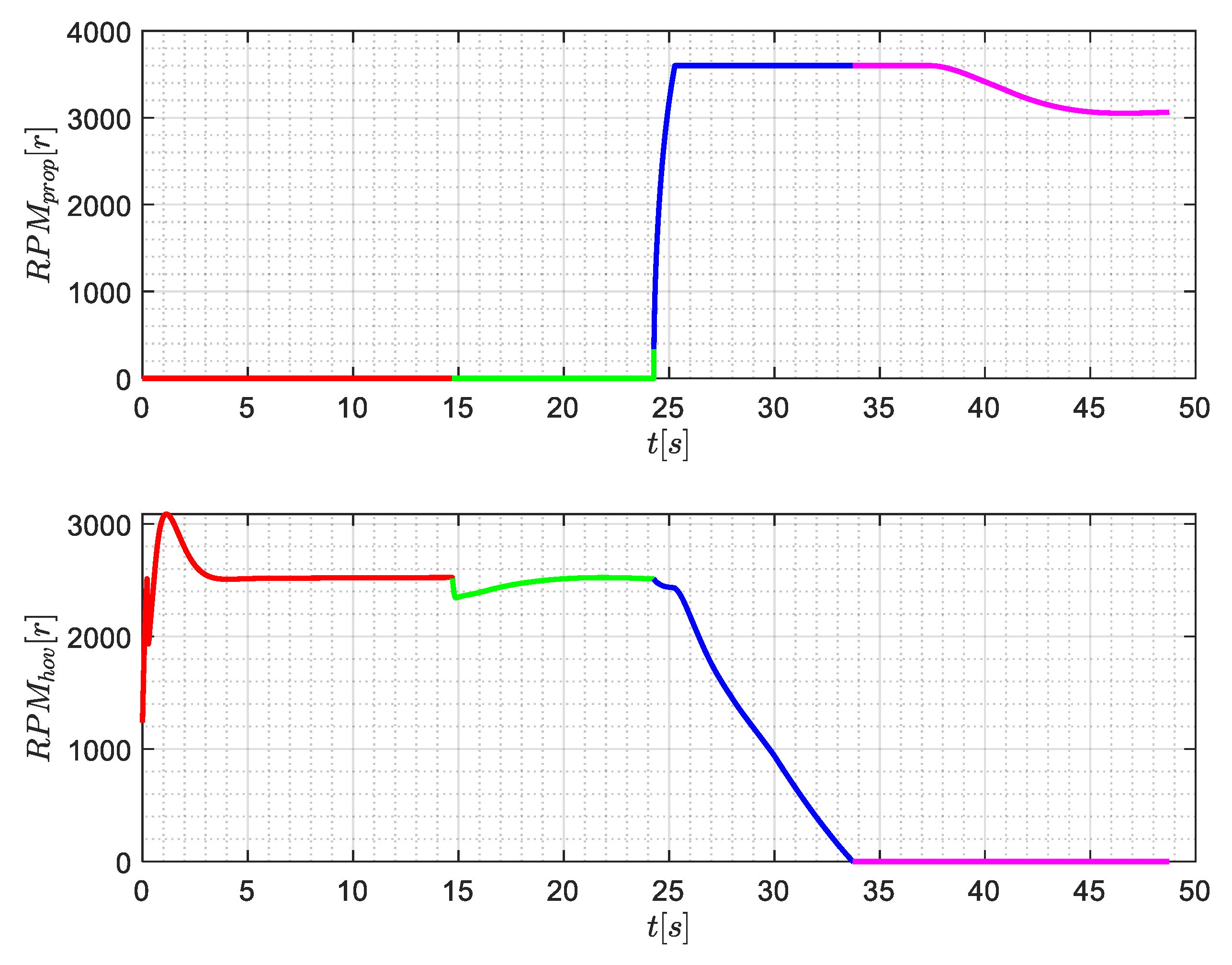
- Stage I: Vertical takeoff
- Stage II: Low-speed acceleration
- Stage III: High-speed acceleration
- Stage IV: ‘Cruise’
5. Simulation
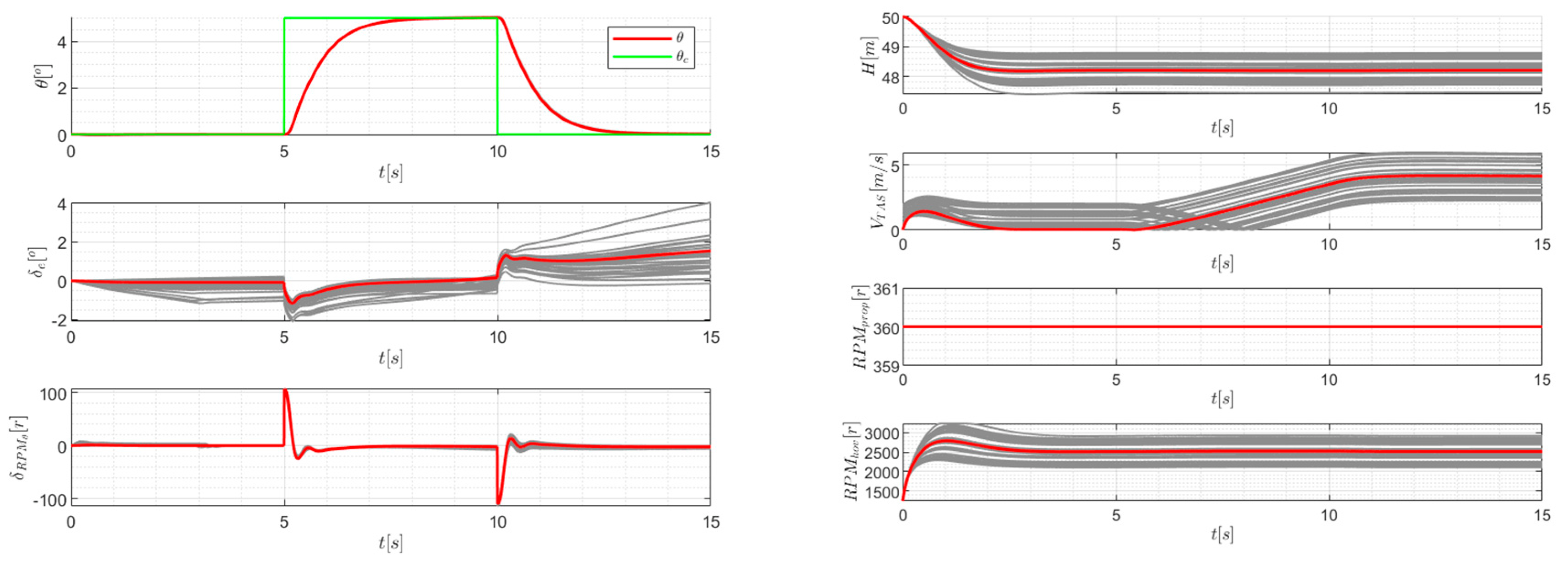
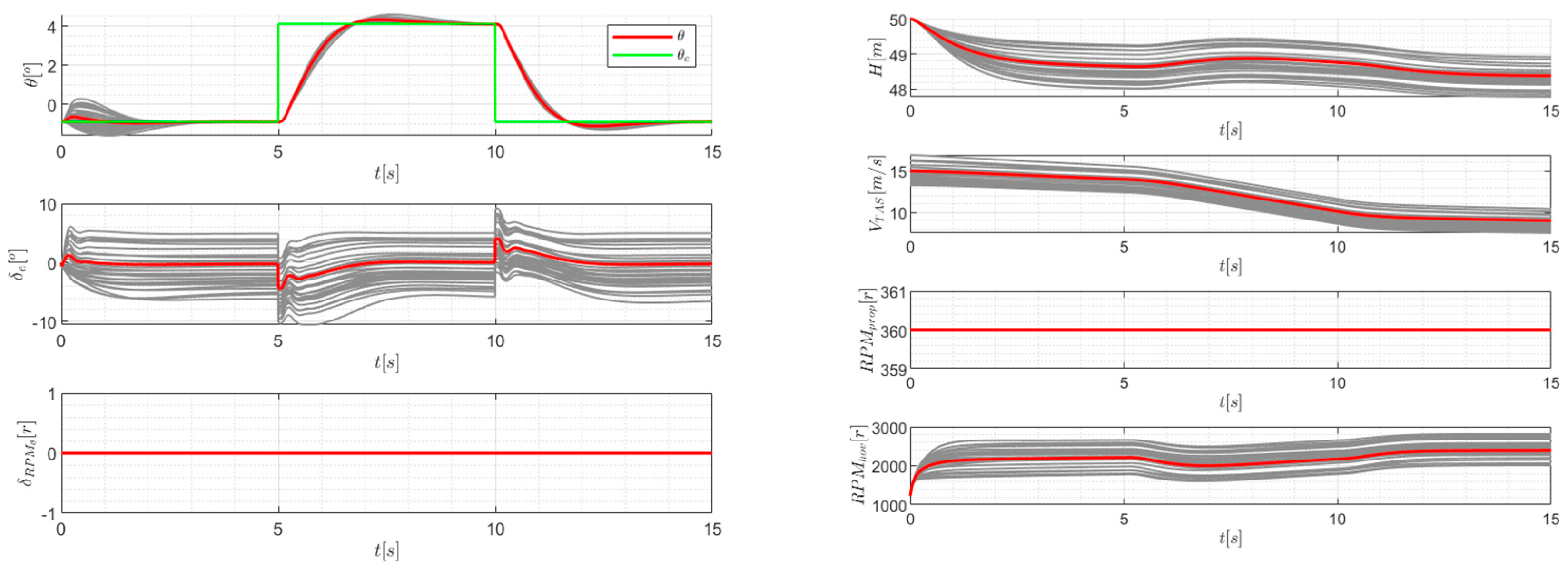
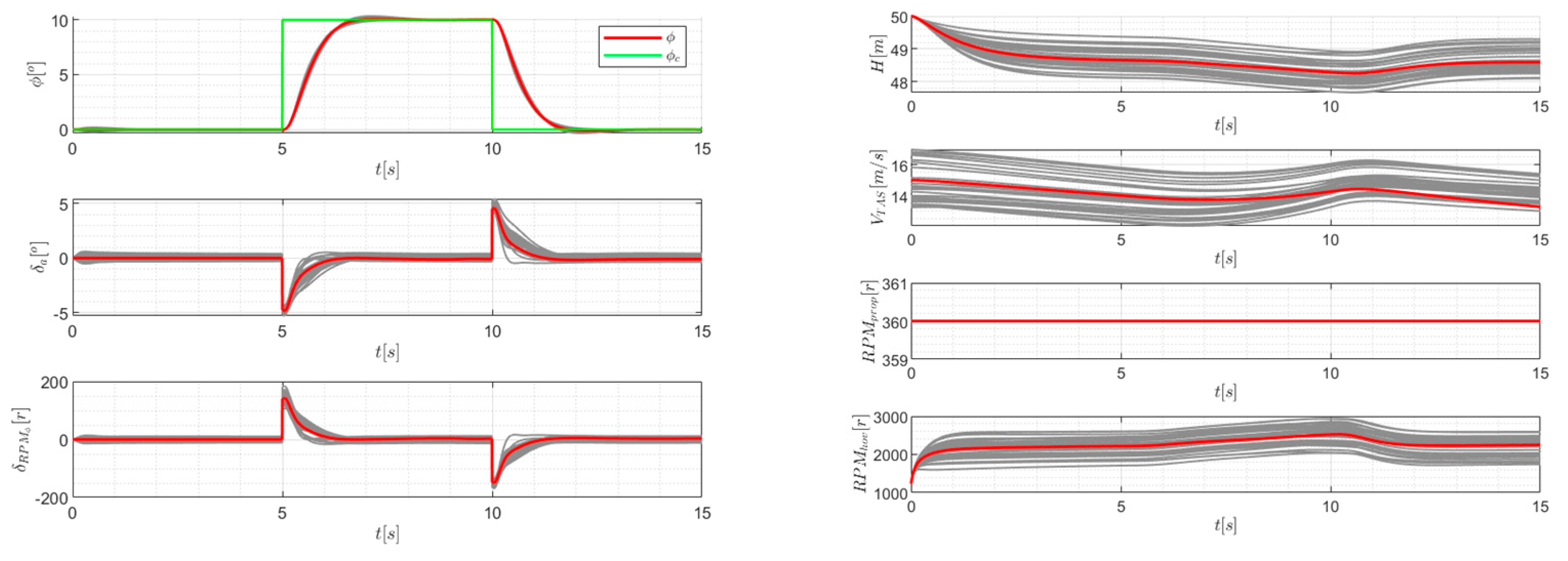
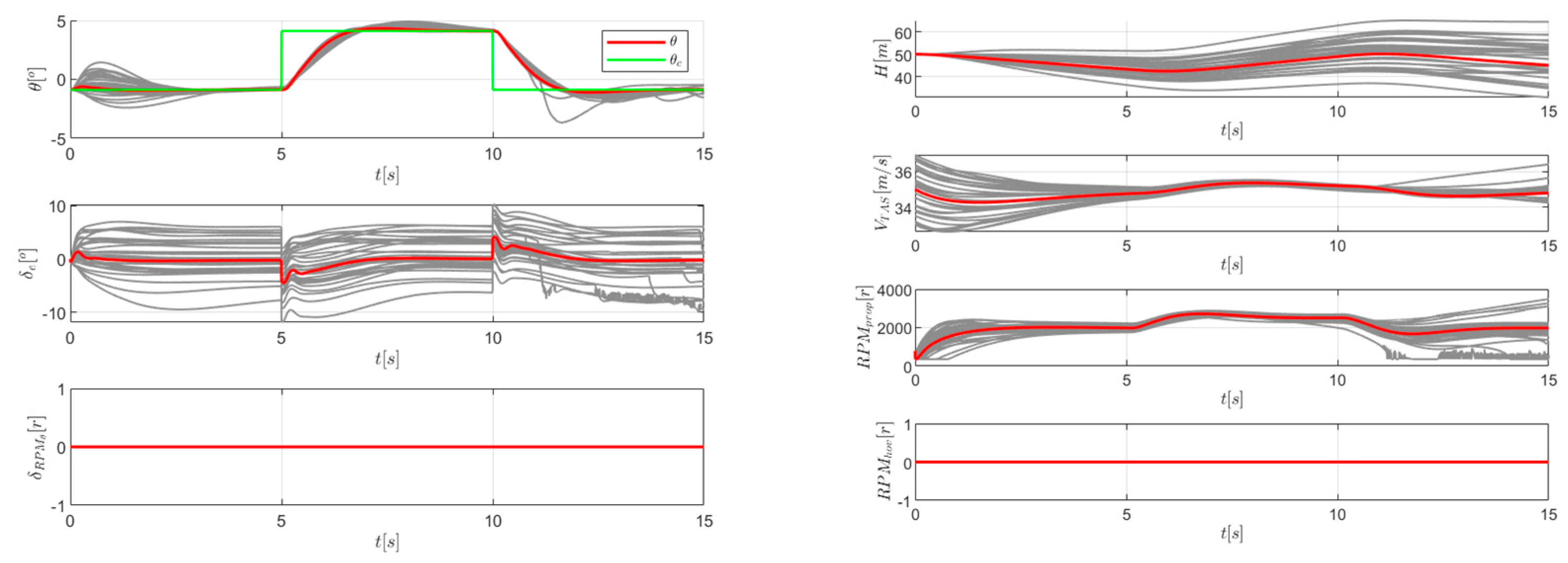
5.1. Inner Loop Monte Carlo Robustness Verification
5.2. Vertical Takeoff and Acceleration Mission
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Courtin, C.; Burton, M.J.; Yu, A. Feasibility Study of Short Takeoff and Landing Urban Air Mobility Vehicles Using Geometric Programming. In Proceedings of the Aviation Technology, Integration, & Operations Conference, Atlanta, GA, USA, 25–29 June 2018; p. 70. [Google Scholar] [CrossRef]
- Mingkai, W.A.N.G.; Zhang, S.; Diepolder, J.; Holzapfel, F. Battery package design optimization for small electric aircraft. Chin. J. Aeronaut. 2020, 33, 2864–2876. [Google Scholar] [CrossRef]
- Thompson, E.L.; Taye, A.G.; Guo, W.; Wei, P.; Quinones, M.; Ahmed, I.; Biswas, G.; Quattrociocchi, J.; Carr, S.; Topcu, U.; et al. A Survey of eVTOL Aircraft and AAM Operation Hazards. In Proceedings of the AIAA AVIATION 2022 Forum, Chicago, IL, USA, 27 June–1 July 2022; p. 3539. [Google Scholar] [CrossRef]
- Thompson, D. Robust Control of an Evtol through Transition with a Gain Scheduling LQR Controller. Ph.D. Thesis, University of Maryland, College Park, MD, USA, 2020. [Google Scholar] [CrossRef]
- Raab, S.A.; Zhang, J.; Bhardwaj, P.; Holzapfel, F. Proposal of a unified control strategy for vertical take-off and landing transition aircraft configurations. In Proceedings of the 2018 Applied Aerodynamics Conference, Atlanta, GA, USA, 25–29 June 2018; p. 3478. [Google Scholar] [CrossRef]
- Dollinger, D.; Fricke, T.; Holzapfel, F. Control inceptor design for remote control of a transition UAV. In Proceedings of the AIAA Aviation 2019 Forum, Dallas, TX, USA, 17–21 June 2019; p. 3268. [Google Scholar] [CrossRef]
- Jones, M.; Perfect, P.; Jump, M.; White, M. Investigation of novel concepts for control of a personal air vehicle. In Proceedings of the American Helicopter Society 70th Annual Forum, Montréal, QC, Canada, 20–22 May 2014; p. 5. [Google Scholar] [CrossRef]
- Lombaerts, T.; Kaneshige, J.; Feary, M. Control concepts for simplified vehicle operations of a quadrotor eVTOL vehicle. In Proceedings of the AIAA Aviation 2020 Forum, Virtual Event, 15–19 June 2020; p. 3189. [Google Scholar] [CrossRef]
- Dollinger, D.; Reiss, P.; Angelov, J.; Löbl, D.; Holzapfel, F. Control inceptor design for onboard piloted transition vtol aircraft considering simplified vehicle operation. In Proceedings of the AIAA Scitech 2021 Forum, Virtual Event, 11–15 and 19–21 January 2021; p. 1896. [Google Scholar] [CrossRef]
- Ducard, G.J.; Allenspach, M. Review of designs and flight control techniques of hybrid and convertible VTOL UAVs. Aerosp. Sci. Technol. 2021, 118, 107035. [Google Scholar] [CrossRef]
- Saetti, U.; Enciu, J.; Horn, J.F. Flight Dynamics and Control of an eVTOL Concept Aircraft with a Propeller-Driven Rotor. J. Am. Helicopter Soc. 2022, 67, 153–166. [Google Scholar] [CrossRef]
- Smeur, E.J.; Chu, Q.; De Croon, G.C. Adaptive incremental nonlinear dynamic inversion for attitude control of micro air vehicles. J. Guid. Control Dyn. 2016, 39, 450–461. [Google Scholar] [CrossRef]
- Acquatella, P.; Falkena, W.; van Kampen, E.J.; Chu, Q.P. Robust Nonlinear Spacecraft Attitude Control using Incremental Nonlinear Dynamic Inversion. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Minneapolis, MN, USA, 13–16 August 2012; Volume 8, p. 4623. [Google Scholar] [CrossRef]
- Lombaerts, T.; Kaneshige, J.; Schuet, S.; Hardy, G.; Aponso, B.L.; Shish, K.H. Nonlinear dynamic inversion based attitude control for a hovering quad tiltrotor eVTOL vehicle. In Proceedings of the AIAA Scitech 2019, San Diego, CA, USA, 7–11 January 2019; p. 0134. [Google Scholar] [CrossRef]
- Yang, H.; Morales, R. Robust full-envelope flight control design for an eVTOL vehicle. In Proceedings of the AIAA Scitech 2021 Forum, Virtual Event, 11–15 and 19–21 January 2021; p. 0254. [Google Scholar] [CrossRef]
- Yun, W.J.; Jung, S.; Kim, J.; Kim, J.H. Distributed deep reinforcement learning for autonomous aerial eVTOL mobility in drone taxi applications. ICT Express 2021, 7, 1–4. [Google Scholar] [CrossRef]
- Ningjun, L.I.U.; Zhihao, C.A.I.; Yingxun, W.A.N.G.; Jiang, Z.H.A.O. Fast level-flight to hover mode transition and altitude control in tiltrotor’s landing operation. Chin. J. Aeronaut. 2021, 34, 181–193. [Google Scholar] [CrossRef]
- Wang, Z.; Mao, S.; Gong, Z.; Zhang, C.; He, J. Energy efficiency enhanced landing strategy for manned eVTOLs using L1 adaptive control. Symmetry 2021, 13, 2125. [Google Scholar] [CrossRef]
- Wang, Z.; Gong, Z.; Zhang, C.; He, J.; Mao, S. Flight Test of L 1 Adaptive Control on 120-kg-Class Electric Vertical Take-Off and Landing Vehicles. IEEE Access 2021, 9, 163906–163928. [Google Scholar] [CrossRef]
- Zheng, Q.; Gao, Z. On practical applications of active disturbance rejection control. In Proceedings of the 29th Chinese Control Conference, Kottayam, India, 22–23 March 2013; Volume 7, pp. 6095–6100. [Google Scholar]
- Gao, Z. Active disturbance rejection control: A paradigm shift in feedback control system design. In Proceedings of the 2006 American Control Conference, Minneapolis, MN, USA, 14–16 June 2006; Volume 6, p. 7. [Google Scholar] [CrossRef]
- Xili, Y.; Yong, F.; Jihong, Z. Transition flight control of two vertical/short takeoff and landing aircraft. J. Guid. Control Dyn. 2008, 31, 371–385. [Google Scholar] [CrossRef]
- Malpica, C.; Withrow-Maser, S. Handling qualities analysis of blade pitch and rotor speed controlled eVTOL quadrotor concepts for urban air mobility. In Proceedings of the VFS International Powered Lift Conference, San Jose, CA, USA, 21–23 January 2020; pp. 21–23. [Google Scholar]
- Wang, M.; Diepolder, J.; Zhang, S.; Söpper, M.; Holzapfel, F. Trajectory optimization-based maneuverability assessment of eVTOL aircraft. Aerosp. Sci. Technol. 2021, 117, 106903. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Geometric Parameters | Value |
|---|---|
| reference area () | 3.0103 |
| wingspan () | 5.8 |
| mean aerodynamic chord () | 0.6 |
| mass () | 120 |
| moment of inertia of axis () | 80 |
| moment of inertia of axis () | 61 |
| moment of inertia of axis () | 122.672 |
| Parameters | Roll | Pitch |
|---|---|---|
| , | 1.5 | 1.5 |
| 1 | 1 | |
| 18 | 12 | |
| 81 | 36 |
| Modes | Multi-Rotors | Transition | Fixed-Wing |
|---|---|---|---|
| Forward/backward | to for z-axis translation | to and for z-axis translation | to for z-axis translation |
| Left/right | to for x-axis rotation | to and for x-axis rotation | to for x-axis rotation |
| Modes | Multi-Rotors | Transition | Fixed-Wing |
|---|---|---|---|
| Forward/backward | for x-axis translation | for x-axis translation | for x-axis translation |
| Left/right | for y-axis translation | for y-axis translation | prohibited |
| Parameters | Ranges |
|---|---|
| The slope of the lift curve | |
| Side force control derivatives | |
| Cross roll control derivatives | |
| Pitch control derivatives | |
| Yaw control derivatives | |
| Yaw damping derivatives | |
| Center of gravity on the x-axis | |
| Inertia moment around the y-axis | |
| Lift control derivatives | |
| Roll stability derivatives | |
| Roll damping derivatives | |
| Pitch damping derivatives | |
| Cross yaw control derivatives | |
| Drag control derivatives | |
| Pitch stability derivatives | |
| Inertia moments around the z-axis | |
| Side force stability derivatives | |
| Roll control derivatives | |
| Cross roll damping derivatives | |
| Cross yaw damping derivatives | |
| Yaw stability derivatives | |
| Thrust coefficients of rotors | |
| Inertia moments around the x-axis |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mao, S.; Gong, Z.; Ye, Z.; Wang, Z.; Guo, T.; Zhang, C. A Linear-Active-Disturbance-Rejection-Based Vertical Takeoff and Acceleration Strategy with Simplified Vehicle Operations for Electric Vertical Takeoff and Landing Vehicles. Mathematics 2022, 10, 3333. https://doi.org/10.3390/math10183333
Mao S, Gong Z, Ye Z, Wang Z, Guo T, Zhang C. A Linear-Active-Disturbance-Rejection-Based Vertical Takeoff and Acceleration Strategy with Simplified Vehicle Operations for Electric Vertical Takeoff and Landing Vehicles. Mathematics. 2022; 10(18):3333. https://doi.org/10.3390/math10183333
Chicago/Turabian StyleMao, Shengchen, Zheng Gong, Zheng Ye, Zian Wang, Tongqing Guo, and Chengxi Zhang. 2022. "A Linear-Active-Disturbance-Rejection-Based Vertical Takeoff and Acceleration Strategy with Simplified Vehicle Operations for Electric Vertical Takeoff and Landing Vehicles" Mathematics 10, no. 18: 3333. https://doi.org/10.3390/math10183333