1. Introduction
The wheelchair, which has a structure of two front support wheels and two rear driving wheels, is one of the best tools for elder or young people with disabilities. To put in other words, disabled people use this instrument to not only go out but also participate in outdoor and indoor activities [
1,
2,
3,
4,
5]. Unfortunately, when disabled persons use a wheelchair, they encounter some problems including climbing steps, opening a door, and picking up an object which is placed on the floor or high shelf [
6]. Therefore, some recent technologies, such as robotic technology, should be used to enhance the performance of the wheelchair system [
7]. Exoskeleton is a robotic system that is accompanied by a wheelchair system in order to provide additional power and recover movement performance [
8]. Wheelchair upper-lime exoskeleton provides considerable performance among different kinds of the exoskeleton robot in which it mixes the boons of rehabilitation and motion assistance of disabled or elder persons. Hence, more applicable controllers for the upper-limb exoskeleton are still needed to enhance the efficiency of the power assist [
9].
Position tracking is the main function in the control of the wheelchair upper-limb exoskeleton system which can be accomplished by various control techniques. For the aim of the position tracking control of the wheelchair upper-limb exoskeleton robot, both proportional-derivative (PD) and proportional-integral-derivative (PID) controllers have been broadly recommended because of their independent and easy-to-tune features [
10,
11,
12,
13]. However, the usage of the integrator in the PID controller leads to a reduction in the closed-loop system’s bandwidth and removal of the steady-state error produced by uncertainty and external disturbance, and a high gain of the integrator can decrease the transient performance and system’s stability. As a result, the PID controller used in many wheelchairs’ upper-limb exoskeleton robotic systems is tuned via small integral gain. Moreover, both PD and PID control methods recommend the asymptotic convergence rate [
14,
15]. Hence, some control techniques have been used to improve the performance of the PD and PID control scheme for exoskeleton robot systems [
16]. In order to provide the fast convergence of position tracking error of the upper-limb exoskeleton system and singularity removal in the control strategy, the non-singular sliding mode control (NSSMC) scheme has been proposed [
17,
18]. Whereas unknown states always exist in the upper-limb exoskeleton robot system, the performance level of the system will be decreased. Hence, by design of the state observer, the states are observed and denied properly which leads to the high performance of the system [
19]. In order to boost tracking performance and remove the chattering in the controller of the system, the fuzzy logic control method has been recommended [
20,
21].
Li et al. [
22] mixed the fuzzy estimation technique with the backstepping control procedure for position tracking control of the wheelchair upper-limb exoskeleton robot system. Riani et al. [
23] proposed an integral terminal-SMC method using a model-based adaptive control procedure for the rehabilitation control of the wheelchair upper-limb exoskeleton system. Wu et al. [
24] offered the fuzzy-based sliding mode admittance control for the exoskeleton robot system in order to provide an opportunity for patients to take part in actions actively. Rahmani and Rahman [
25] recommended a fuzzy control scheme based on sliding mode control with the design of a new switching surface for the upper-limb exoskeleton system. Precup and Preitl [
26] investigated the stability and sensitivity aspects of the fuzzy control systems. In [
26], with the usage of Popov’s hyperstability theory accompanied by application on a mechatronic system, the stability of the fuzzy control system is demonstrated. Then, by using the mechatronic application on servo-systems, the sensitivity of the fuzzy control system is examined. Chen et al. [
27] designed a machine learning-based artificial intelligence method using an evolved bat algorithm to investigate the stability of the TS fuzzy systems. Precup et al. [
28] offer two data-driven-based sliding mode control and fuzzy control methods for the stability of the error dynamics of the nonlinear system. Moreover, the validity of this approach is proved by three-dimensional crane system laboratory equipment. Precup et al. [
29] proposed the adaptive fuzzy control technique combined with model predictive control to address the problem related to multi-parametric quadratic programming and apply an electrohydraulic servo-system experimentally to validate the suggested method.
Table 1 is provided to elaborate on the disadvantages of the existing methods which consider the control scheme of the upper-limb exoskeleton robot system compared with the proposed method.
As it can be found from the above discussion related to the design of the different control methods for position tracking of the wheelchair upper-limb exoskeleton robot system, no control method has been designed based on the fuzzy nonsingular terminal sliding mode control method using state observer for position tracking of the upper-limb exoskeleton robot system. Therefore, the main novelties of this article can be described briefly as follows:
- −
Presentation of free and typical types of the dynamical robot system for describing a dynamical model of the upper-limb exoskeleton robot system;
- −
Design of the fixed-time convergence rate state observer for compensation of the uncertainty in the states of the upper-limb exoskeleton robot system;
- −
Proposition of the nonsingular terminal sliding mode control method with the target of the fixed-time convergence of position tracking error of the exoskeleton robot system;
- −
Suggestion of fuzzy control procedure for improvement of the control input performance.
The rest of the paper is organized as follows: the dynamical model of the wheelchair upper-limb exoskeleton robot system is introduced in
Section 2. In
Section 3, the control procedure including the design of the state observer is provided. Presentation of the nonsingular terminal sliding mode control method and recommendation of the fuzzy control technique are explained in
Section 4. Simulation results and some conclusions are provided in
Section 5 and
Section 6, respectively.
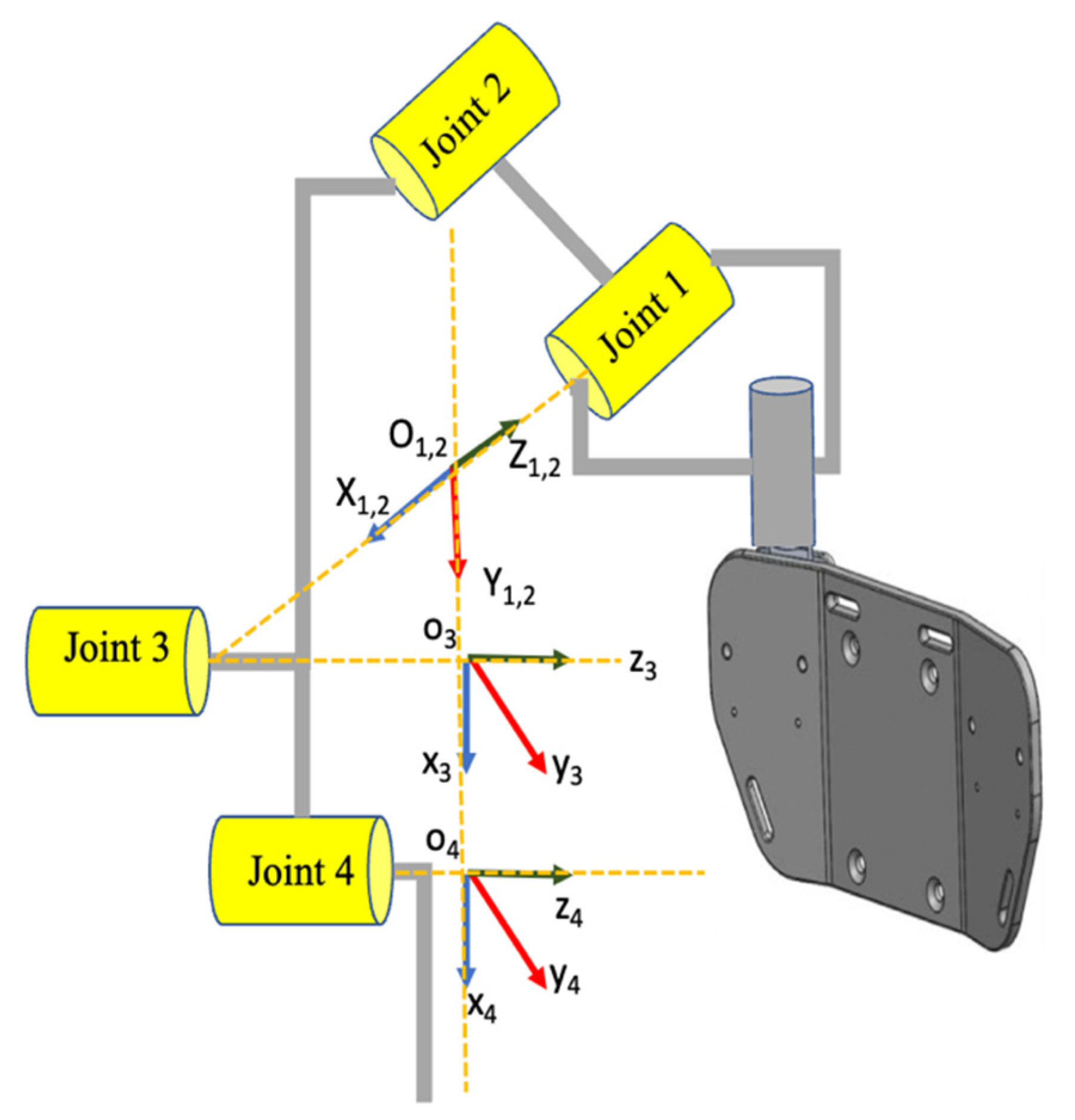
2. Description of Mechanical Model of Upper-Exoskeleton Robot
The wheelchair upper-limb exoskeleton robot system comprises two main parts as shown in
Figure 1; a glove that is used for the user to accomplish the required capability and an upper-limb exoskeleton. In the upper limb exoskeleton part, there are four main joints with three degrees of freedom (3-DoF) such as joint 1 which is responsible for adduction and abduction function, joint 2 related to the internal and external rotation action, joint 3 for flexion and extension, and joint 4 is used for elbow flexion and extension [
11].
As was mentioned in [
11], the designed control method for position tracking of an exoskeleton robot system did not require the dynamical model of the system; hence, the following 2-DoF dynamical model is considered to represent a dynamical model of the typical robot system [
30]:
where
,
, and
are the position, velocity, and accelerations of the robot system, respectively. The expression
is the inertia matrix by:
with
,
,
. The expression
is the Coriolis and centrifugal forces matrix as:
with
. The expression
is the gravitational forces matric as:
In addition,
is the control input. Moreover, the required parameters and their unit and quantity are given in
Table 2. With the simplification of Equation (1) we have:
5. Simulation Results
In this part, the Simulink environment in MATLAB software is selected to provide some simulation results. Afterward, simulation results based on the fuzzy nonsingular terminal sliding mode control approach using the fixed-time state observer are provided. Later, two examples with different initial conditions and various desired values are examined. Thus, proficiency, productivity, and robustness of the recommended method are demonstrated based on these two examples. In each example, simulation results are obtained according to three initial conditions in
Table 3 and a specific desired value in
Table 4. Moreover, it is worth noting that, in each example, the parameters of the control process are tuned based on a trial-and-error approach, the selected parameters are the same in both examples and are considered in
Table 5.
- A.
Example 1
Simulation results are obtained according to the initial conditions, desired values, and control parameters which are specified in
Table 3,
Table 4 and
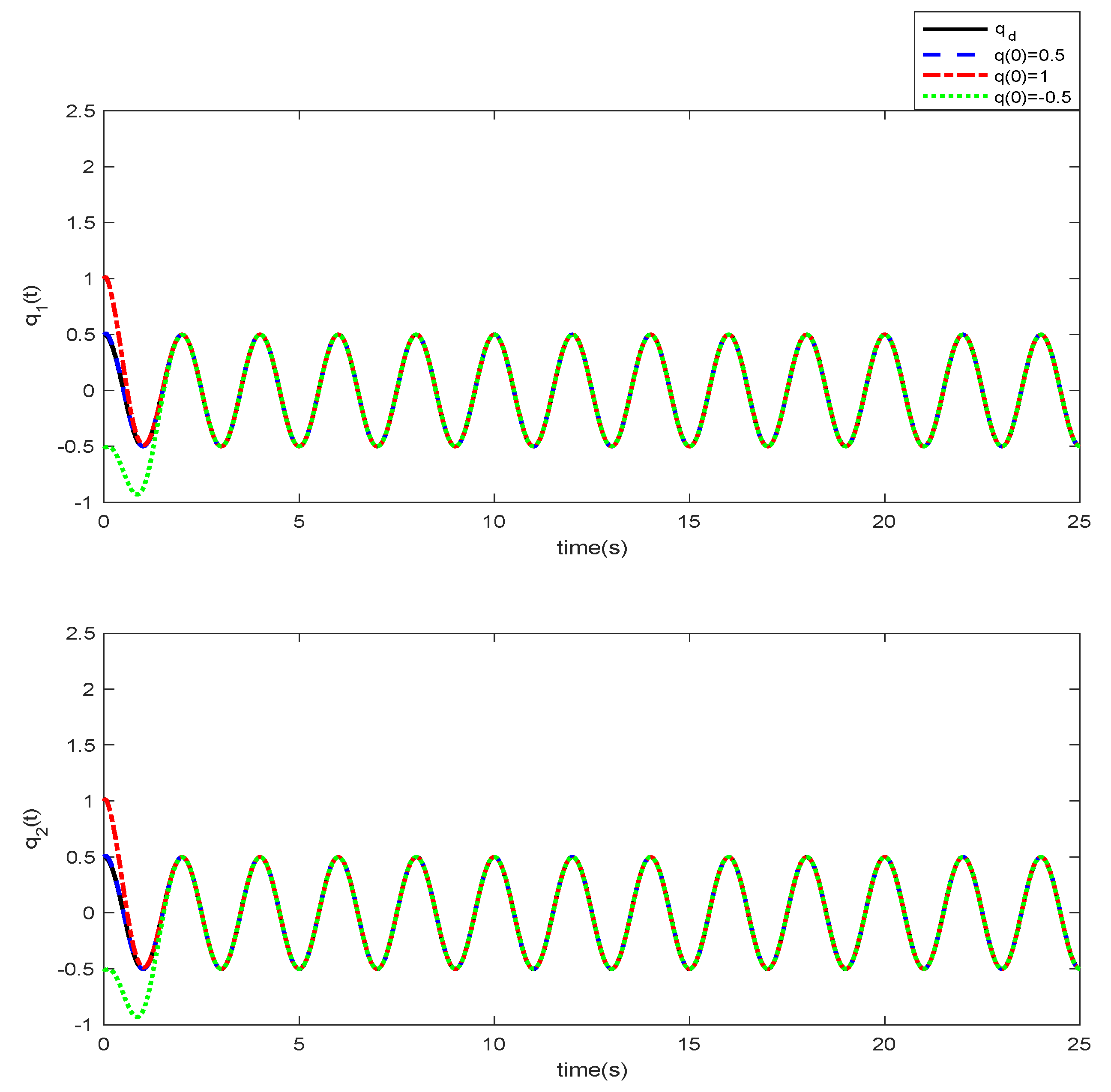
Table 5. As one can obtain from
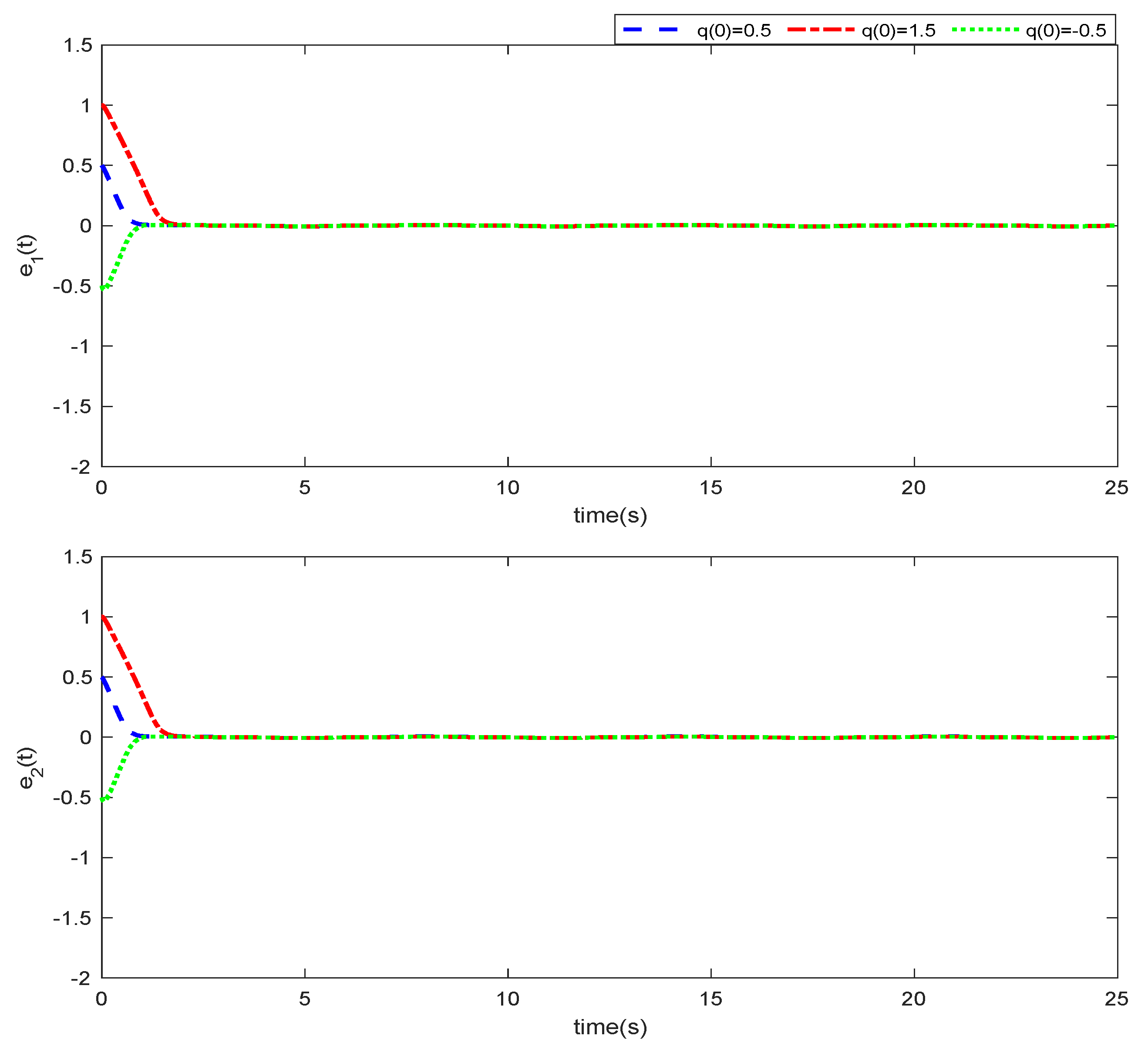
Figure 4, the joints of the upper-limb exoskeleton robot system track the specified desired values with a fixed-time convergence rate. Moreover, the robustness of the proposed method in tracking the desired values is observed by using different initial conditions. It can be seen that under different initial conditions, the desired tracking performance is accomplished very well. According to
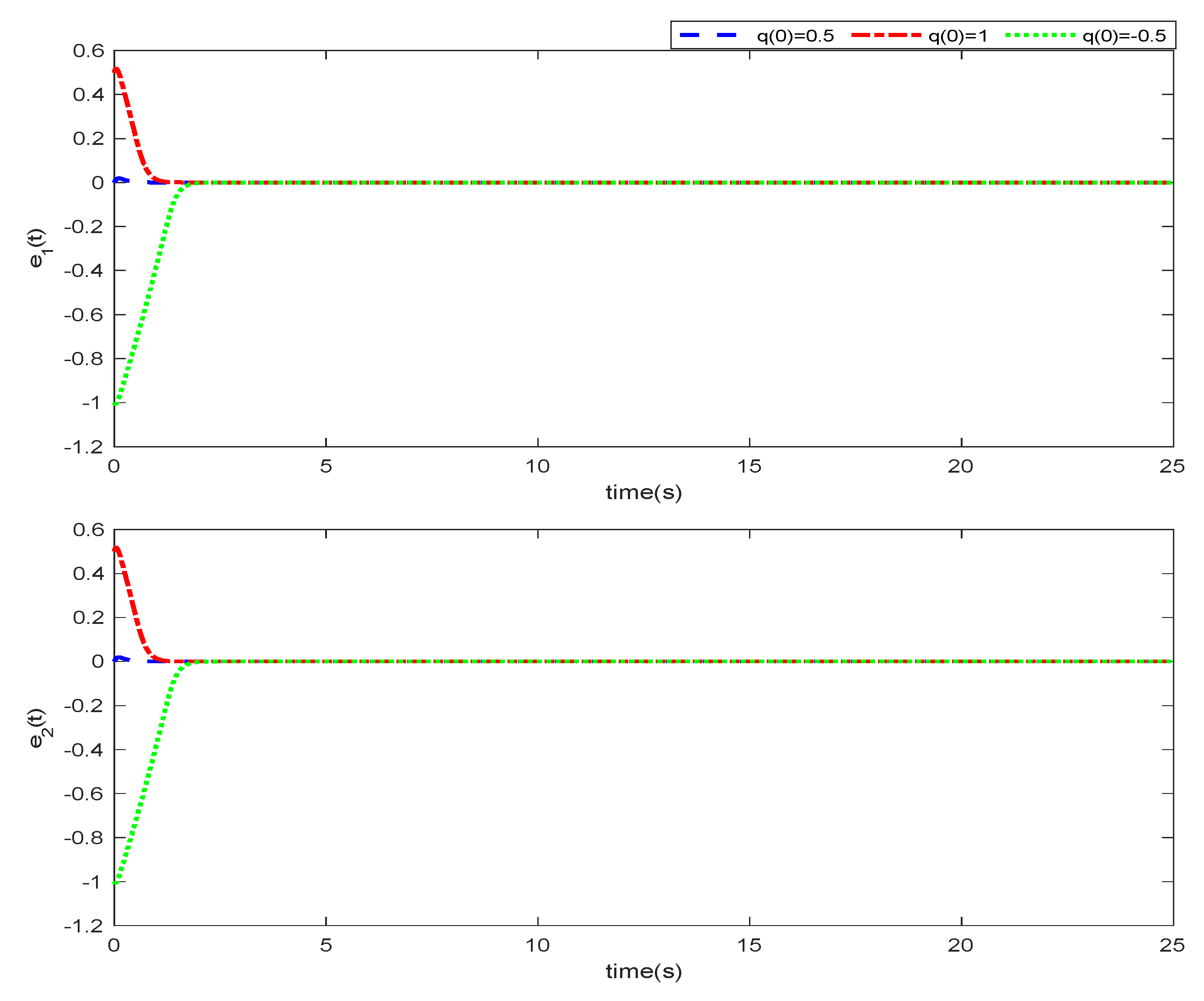
Figure 5, the tracking error signals are converged to zero with a fixed-time convergence rate. Moreover, the robustness in the convergence of the tracking error is perceived by using different initial conditions. From
Figure 6, the trajectories of the nonsingular terminal sliding surface converge to zero with a fixed-time convergence rate. Under different initial conditions, it can be attested that sliding surfaces have robust performance.
Now, the performance of the fuzzy control procedure is demonstrated based on
Figure 7. As one can find, the control input signal owns very slight chattering which can be observed in
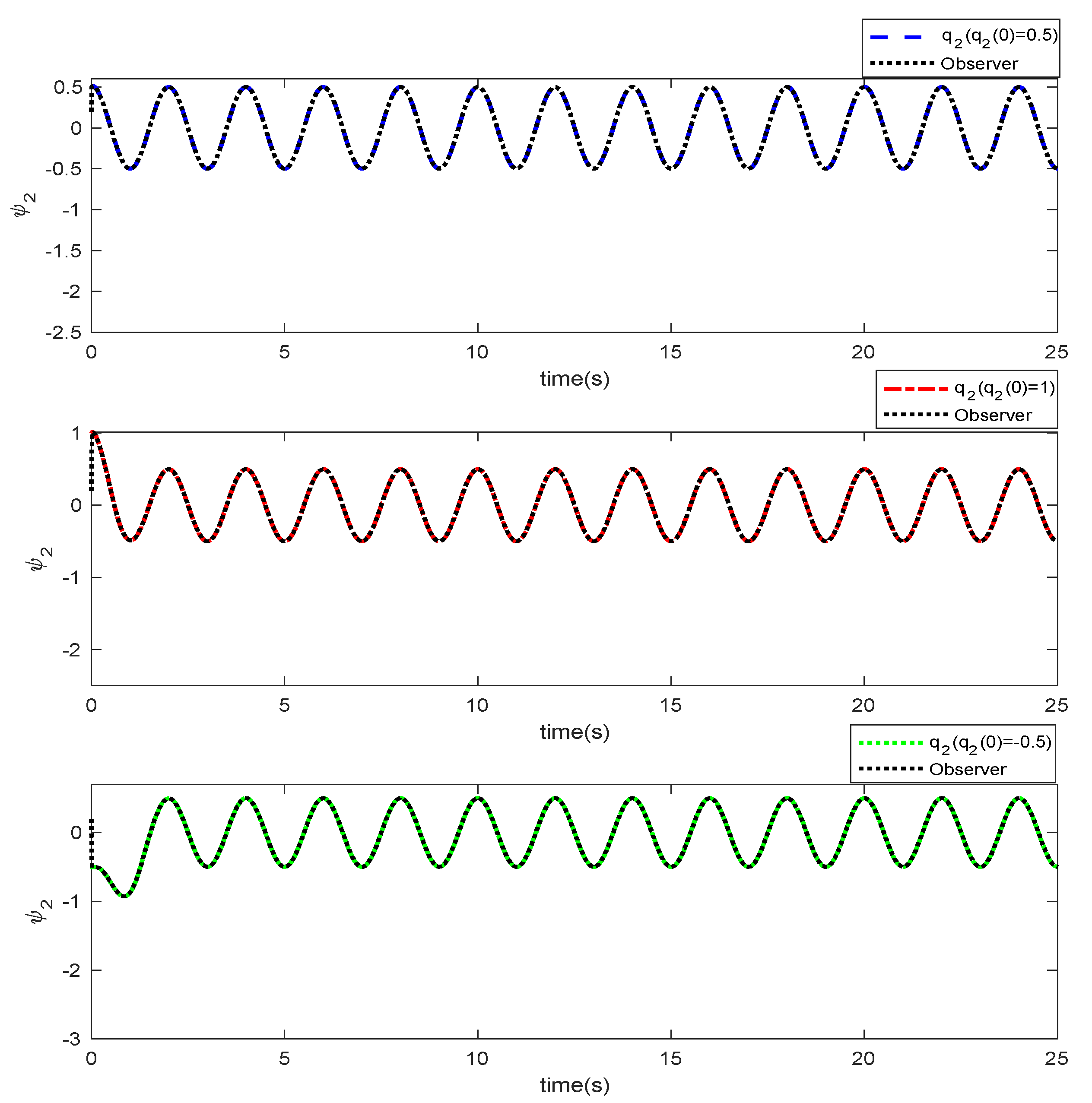
Figure 7. Moreover, under different initial conditions, control input possesses boundedness and robustness performance. In the last part of example 1, the performance of the fixed-time state observer is investigated in
Figure 8 and
Figure 9. As one can observe, the states
and
can be estimated accurately based on the recommended state observer. Moreover, by using various estimators based on different initial conditions, the robustness of the fixed-time state-observer is proved. In addition, time responses of the estimation error are displayed in
Figure 10, which attests to the robustness and accuracy of the suggested state observer.
- B.
Example 2
As mentioned before, for demonstration of the efficiency of the fuzzy-based nonsingular terminal sliding mode control approach, a second example considering a new desired trajectory is taken in this part. Hence, the simulation results including desired tracking, tracking error, sliding surface, control inputs, fixed-time estimator, and estimation error are obtained and depicted in
Figure 11,
Figure 12,
Figure 13,
Figure 14,
Figure 15,
Figure 16 and
Figure 17, respectively. As can be found from these figures, the fixed-time tracking control, performance of the fuzzy procedure over control input, and fixed-time state observer are accomplished suitably.
Therefore, according to both examples that have been presented above, desired tracking control of the upper-limb exoskeleton robot system based on the fuzzy nonsingular terminal sliding mode control technique is accomplished appropriately. Moreover, the high effect of the fuzzy control procedure over the performance of the control input of the upper-limb exoskeleton robot system is demonstrated. Finally, the high performance of the fixed-time state observer in the approximation of the unknown states of the upper-limb exoskeleton robot system is achieved.
Remark 1 [
33]: At the end of the simulation part, the following table related to the integral of the absolute value of error (IAE) based on different initial conditions is provided to compare the IAE values of the nonsingular terminal sliding mode control (NTSMC) and fuzzy-based NTSMC methods. IAE values are obtained from the following formula as:
where
is the signal.
As one can observe from the IAE values presented in
Table 6, the IAE values of the fuzzy-based NTSMC method are smaller than those from the NTSMC method. Thus, the proficiency of the fuzzy method compared to the non-fuzzy method is demonstrated.
6. Conclusions
As one can observe, no one cannot neglect the helpful impacts of the wheelchair upper-limb exoskeleton robot system. So, in this project, with rehabilitation purposes for disabled people, fuzzy based on a nonsingular terminal sliding mode control scheme is presented for position tracking of the upper-limb exoskeleton robot system. Then, uncertain states which exist in the upper-limb exoskeleton robot system can be compensated with the usage of the fixed-time state observer. In addition, position tracking control of the upper limb exoskeleton robot system is realized by the nonsingular terminal sliding mode control technique. Moreover, the performance of the controller is enhanced based on the fuzzy rules procedure. Hence, the chattering phenomenon is removed from the control input, so, the performance of the controller is improved. At last, simulation results are prepared to show the productivity of the recommended control method on the upper-limb exoskeleton robot system using MATLAB/Simulink. As cases for future work, the experimental validation of the proposed method on a practical upper-limb exoskeleton robot and the design of the control method for the desired tracking of the upper-limb exoskeleton robot under model uncertainty, external disturbance, and input saturation can be considered.

 ,
, 


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}