1. Introduction
In the 1940s, Von et al. [
1] investigated game problems using a systematic mathematical approach. Subsequently, game theory has become a mathematical model used to study the decision-making behavior of players with rational thinking and learning ability. Note that interactions among numerous participants may not be evenly mixed. Specifically, players only interact with their neighbors, not with all players. Thus, interaction structures among players have attracted the attention of researchers. Numerous works [
2,
3,
4] have used network graphs to describe the topology among players, with the nodes representing players and each edge connecting two interacting players. Based on strategy updating rule, the game evolves on the network architecture, which is called a networked evolutionary game (NEG) [
5]. With the integration of disciplines, NEG provides a feasible framework for research into economics, sociology, and biology [
6,
7,
8].
Finding equilibriums is one of the most important problems in game theory. Because the participants are capable of learning, their strategies evolve towards higher revenues [
9,
10]. Updating strategies in multiple directions makes it difficult to capture the profile dynamics. The Nash equilibrium [
11] is a special combination of strategies in which each player unilaterally changes strategy without increasing revenues. Therefore, the stability of a profile at Nash equilibrium has great significance. It is worth noting that the Nash equilibrium may not be unique. If the NEG is expected to evolve to an optimal equilibrium, a feasible approach is to design the strategies of certain players to guide the strategy evolution of others. This is consistent with stabilization theory in control theory.
Players update their strategy by probing the information of their neighbors. However, certain factors that influence strategy selection should not be ignored. Among them, signal disturbances and information time delays are two prominent factors. For example, signals generated by an external device are disturbances, which interfere with the information interaction among players. The information delays caused by communication equipment can be regarded as bounded time-varying delays. In recent years, many articles have studied the influence of disturbances and time delays on game dynamics. For instance, Jimenez et al. [
12,
13] considered a game with bounded uncertain disturbances and obtained the effect of the disturbances on Nash equilibrium; Yuan et al. [
14] designed an event-triggered strategy for nonlinear quadratic games with disturbances; Yang et al. [
15] described the effect of stochastic disturbances on evolutionary game dynamics; Qin et al. [
16] found that time delay affected the cooperation level of the prisoner’s dilemma game on a two-dimensional lattice; Stewart et al. [
17] revealed that time delay could promote the emergence of cooperation in an NEG with a small number of players and strategies. In summary, disturbance and time delay make it difficult to analyze game dynamics. As far as we know, there are few results on the influence of the combination of disturbances and time delays on NEG dynamics, attracting us to further investigation.
NEG is a discrete system with finite value in essence. A matrix is an efficient mathematical tool in dealing with discrete systems. The semi-tensor product (STP) of matrices, proposed by Professor Cheng and his team [
18,
19], breaks the dimension limitation of traditional matrix products and enriches the research methods in the modern control field. In recent years, STP theory has been successfully applied in many fields, such as logical systems [
20], finite games [
21,
22], graph theory [
23], finite automatic machines [
24], biological systems [
25,
26,
27], and more. Based on the semi-tensor product of matrices, research on finite games has achieved fruitful results. For example, Cheng et al. [
28] constructed the potential equation and presented the calculation method of the potential function; the orthogonal decomposition theorem was proposed in [
29] based on the vector space structure; and the algebraic model of NEGs was established in [
5] and their dynamic behavior was analyzed, including stability, controllability, and consistency. With the help of STP theory, it is possible to solve the robust stability problems of NEGs with time delays.
Compared with the previous works on the stability and stabilization of NEGs, the highlights of our findings are the following characteristics:
Using STP of matrices and dimension augmenting technique, an auxiliary system is constructed to formulate the dynamics of NEGs with time delays and disturbances. The auxiliary system is a linear-like system. It reduces the difficulty of analyzing NEG dynamics with time-varying delays.
Based on the auxiliary system, an explicit criterion is derived for robust stability. It is presented as a matrix and is easily verified by mathematical software such as Matlab.
In order to stabilize NEG to the target equilibrium, the robust stability problem is transformed into the robust stabilization problem. Based on the auxiliary system, the necessary and sufficient condition is derived for set stabilization. Moreover, an algorithm is developed to design the set stabilization controller.
This paper is divided into the following sections.
Section 2 introduces basic notation and the preliminaries of STP;
Section 3 presents the NEG model and analyzes its robust stability;
Section 4 discusses set stabilization; and
Section 5 provides an example to illustrate the results. Finally, in
Section 6 and
Section 7, we close with a brief conclusion and point out several directions for future research.
2. Preliminaries
The basic notation used in the following section is introduced below.
- (1)
is the set of all real matrices
- (2)
,
- (3)
- (4)
() denotes the i-th column (row) of matrix A
- (5)
- (6)
- (7)
is a logical matrix, which is abbreviated as
- (8)
represents the set of -dimensional logical matrices
- (9)
∘ denotes the Hadamard product of matrices
As STP is defined based on the Kronecker product, we first introduce the Kronecker product and then present the concept and properties of STP.
Definition 1 ([
19]).
Let . Then, the Kronecker product of X and Y is Definition 2 ([
19]).
Let . Then, the STP of X and Y is
where represents the least common multiple of n and p. For simplicity of description, the products of all matrices are assumed as STP in the sequel and the symbol ”⋉” is omitted unless otherwise specified.
Identify elements as vector form . There then exists a one-to-one correspondence from to . Therefore, and can be regarded as the same set, where is called the vector form of . Based on this, we introduce an important property to transform logical functions into algebraic forms in the following.
Lemma 1 ([
19]).
For a mix-valued logical function , there exists a unique matrix such thatwhere and . In addition, is called the structural matrix of f. Lemma 2 ([
19]).
Let , , , , and .- (1)
Define . Then, .
- (2)
Define and . Then, and
Definition 3 ([
19]).
The Khatri-Rao product of two matrices and is 3. Formulation and Robust Stability Analysis of NEGs with Time Delays
In this section, we first present the model of NEG with time delays and disturbances. Then, the algebraic formulation is established to analyze the robust stability of the game.
3.1. Model Description
A normal form game, denoted by , consists of three parts:
- (1)
The set of players ;
- (2)
Each player has a strategy set . The strategies of all players constitute a profile, and the set of a profile is denoted by ;
- (3)
Each player has a payoff function, .
A network graph
describes the topology among players, which consists of nodes and edges. Each edge is attached to an edge-related fundamental game,
, which is played by neighboring player
i and player
j. According to strategy updating rules (SURs), the game evolves on
, namely, the NEG. Consider that the dynamics of an NEG are affected by the time-varying delay,
, and external disturbance,
,
. Specifically,
depends on the profile, and
is generated by the following external disturbance system:
where
represents the states of system (
1) at time
t,
denotes the output of system (
1) at time
t,
and
are logical functions, and
.
A detailed introduction of an NEG with time delays and disturbances is provided below.
Definition 4. A disturbed NEG with time delays is denoted by , where
- (1)
is a network graph with node set and edge set ;
- (2)
is a fundamental game set, where is an edge-related fundamental game played by players i and j;
- (3)
is an SUR set, where is the SUR of player ;
- (4)
is the time-varying delay that occurs when players receive information from others;
- (5)
is a disturbance set.
Let
denote the neighbor set of player
. The dynamics of
are formulated as
where
represents the strategy of player
i at time
t,
is the SUR of player
i. We denote by
the profile of
at time
t.
In addition, the overall payoff
of player
at time
t is computed by
where
denotes the payoff function of player
i interacting with player
j.
Subsequently, the dynamics (
2) are converted into an algebraic formulation by the STP method.
3.2. Algebraic Formulation
First, we convert the strategies
and disturbances
into vector form,
and
, respectively. Then,
, and
,
. Applying Lemma 1, the dynamics (
2) have the algebraic form as
where
is the structural matrix of
Next, we construct an auxiliary system for (
2) using the dimension augmenting technique. A projection matrix
is defined for player
i as
where
Let
, where
and
. Using projection matrix (
5), (
4) can be further calculated as
Considering the time-varying delay, there exists a structural matrix
such that
Set
. Then, (
6) is equivalent to
As for disturbances, let
and
, where
. According to Lemma 1, there exist two structural matrices
and
for
and
, respectively, such that
Consequently, (
7) is transformed as
Using the Khatri–Rao product of matrices, (
8) and (
9) can be converted into
and
where
and
. From
, we derive
where
Let
. An auxiliary system is constructed as
where
Remark 1. Disturbance and time delay increase the difficulty of analyzing NEG dynamics. By dimension augmentation, the dynamic system (2) is equivalently converted into the algebraic system (12). System (12) is a linear-like system. With an initial state , the state of system (2) can be intuitively derived from system (12). Next, the dynamics of are investigated based on system (12). 3.3. Robust Stability Analysis
Before analyzing the stability of , the concepts of robust Nash equilibrium and robust stability are described below.
Definition 5. Consider the NEG . A profile is a robust-Nash equilibrium if, for each player, ,where It is assumed that is the robust-Nash equilibrium of in the sequel. With an initial state , the profile of at time t is denoted by .
Definition 6. The NEG is robust stable at the robust-Nash equilibrium if there exists a positive integer T such that Similar to the concept of robust stability, the concept of set stability of a system (
12) is defined. Given a nonempty set
, system (
12) is said to be set stable at
if there exists an integer
such that
Note that as the disturbance system (
1) is a finite-valued system, the evolutionary trajectory starting from initial
can reach corresponding attractors of (
1) in finite time. Assume that
are the attractors of (
1). Let
,
and
Lemma 3. The NEG is robust stable at the robust-Nash equilibrium if and only if system (12) is set stable at Γ. Proof. (Necessity) It is assumed that
is robust stable at
; then, there exists a positive integer
T which makes Equation (
14) valid. According to system (
1), if
is given,
and
are known. Therefore, the arbitrariness of
is equivalent to the arbitrariness of
. Set
. When
, we obtain
and
. Hence,
. This implies that system (
12) is set stable at
.
(Sufficiency) Assume that system (
12) is set stable at
. Then, there exists an integer
such that
holds for any
and any
. Notice that
is a one-to-one correspondence from
to
. Thus, for any
and
, we obtain
and
. It can be derived that
. Therefore,
is robust stable at
. □
Based on Lemma 3, we draw the following verification condition of the robust stability of .
Theorem 1. The NEG is robust stable at the robust-Nash equilibrium if and only if there exists an integer such that Proof. (Necessity) Suppose that
is robust stable at
. According to Lemma 3, system (
12) is set stable at
. Therefore,
holds for
Assume that
and
. Clearly,
. From the arbitrariness of
, we derive that (
16) holds. Notice that the state space of system (
12) is finite; thus,
.
(Sufficiency) Assume that (
16) holds. Due to
Q being a logical matrix, it can be derived that (
16) remains available for any
. Then,
holds for any
and any
, which is equivalent to
Clearly, holds for any and any . Consequently, is robust stable at . □
5. Example
5.1. Model Description
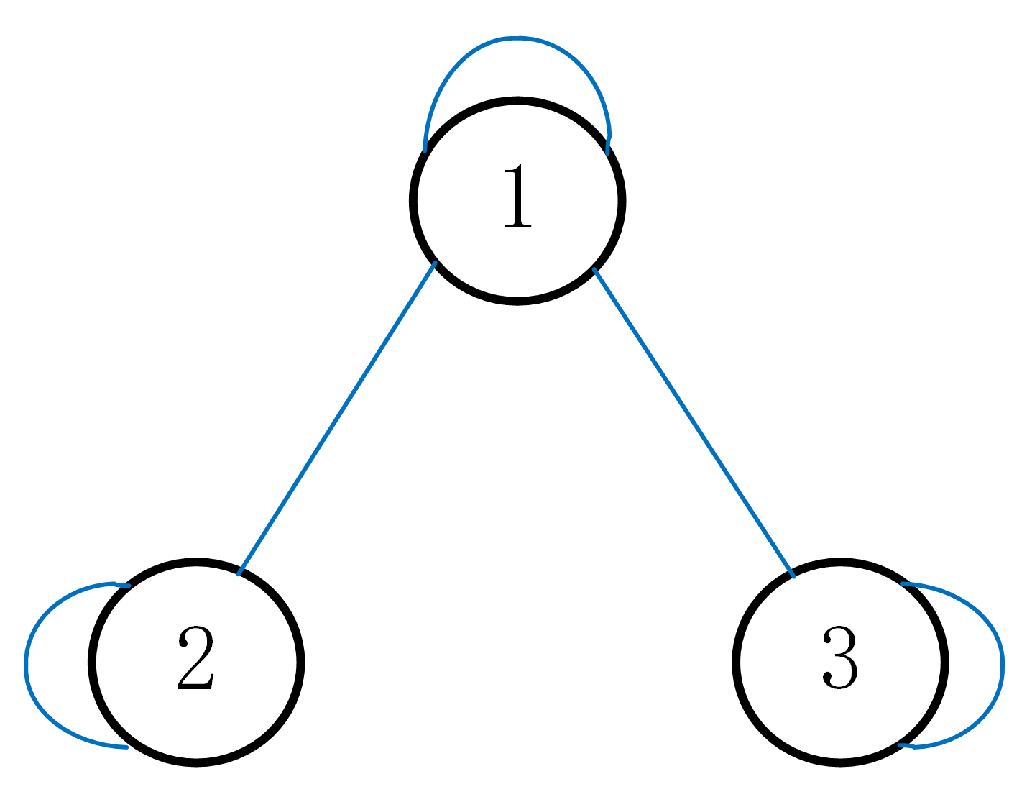
Consider an NEG which has three players, , and a strategy set . The detailed information is as follows.
- (1)
The network graph
is shown in
Figure 1.
- (2)
There are two edge-related fundamental games,
and
; the payoff matrices are provided in
Table 1 and
Table 2.
- (3)
Imitating the strategy of the neighbor who has the optimal payoff is the SUR of each player, namely,
- (4)
.
- (5)
The external disturbance system is
where
,
,
,
.
The dynamics of
are formulated as
5.2. Robust Stability Analysis
Using the semi-tensor product of matrices, the auxiliary system is constructed as
where
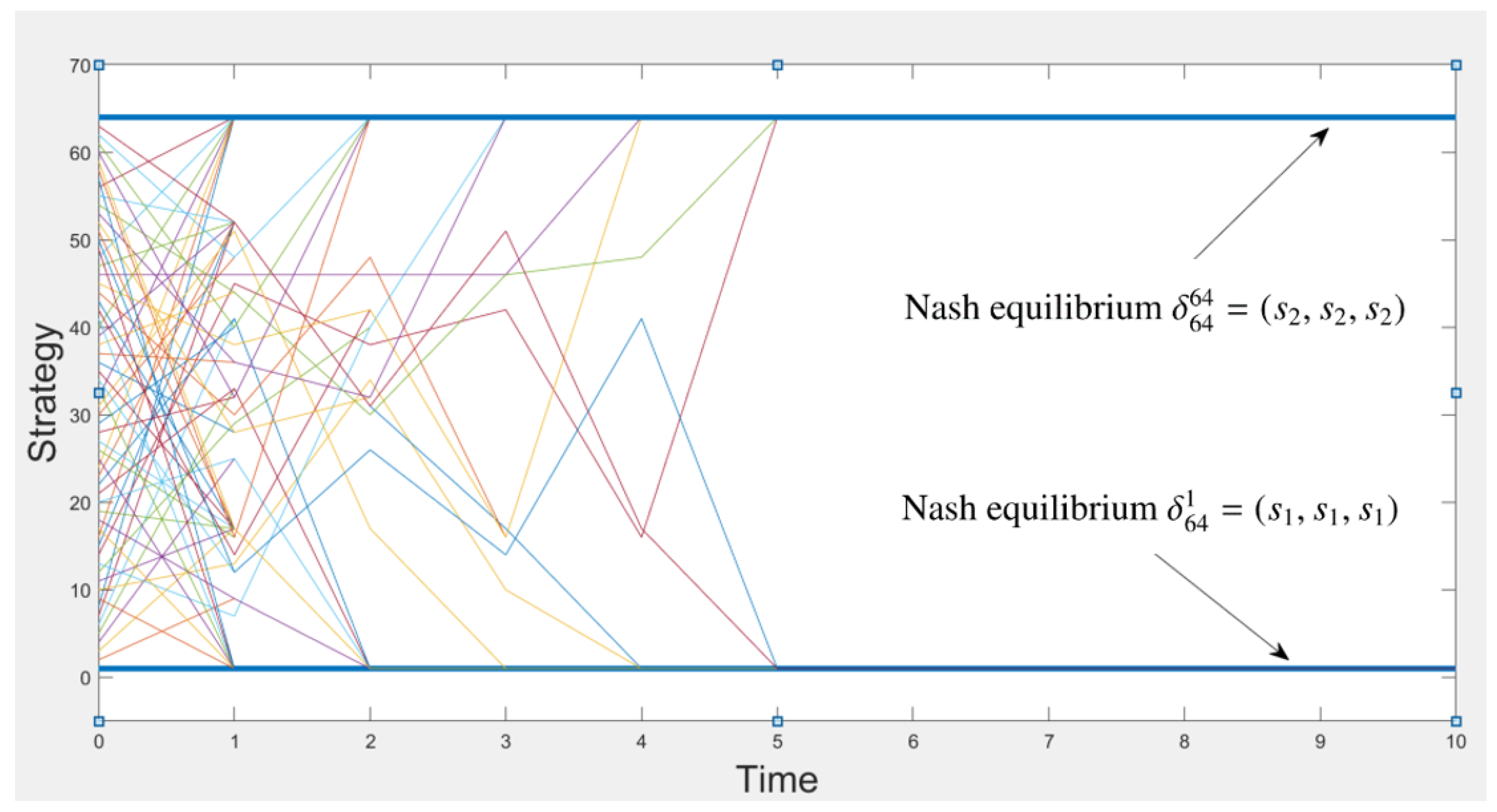
The evolutionary trajectory of
is described by
Figure 2, from which we can see that the trajectories initialized from any profiles are stabilized at two equilibriums,
and
.
A calculation shows that is the unique fixed point of the disturbance system. We can find an integer such that . Clearly, . According to Theorem 1, is robust stable at Nash equilibriums and .
5.3. Robust Stabilization Analysis
Assuming that
is an optimal Nash equilibrium, we consider the control problem. Let player 1 be a control player and players 2 and 3 be state players;
with player classification is rewritten as
. The dynamics of
are described as
where
,
, and the time delay is
.
We intend to control player 1 to steer
to be stabilized at
. According to (
18) and (
19), an auxiliary system is constructed as
where
and
. Clearly,
. A calculation shows
. Per Theorem 2,
can be steered to
.
According to Algorithm 2, one feasible choice of is . Under the controller , we derive that holds for any and any and then is stabilized at .






{kind=link}
{kind=link}