1. Introduction
Since the 21st century, with the development of earth science and computer science, 3D digital modeling technology [
1] has been gradually introduced into the field of geology. The combination of mathematical geology [
2] and computer technology has provided a new way for 3D geological modeling to be applied in mining development. As a kind of important geological bodies with special economic and social value, the construction of 3D orebody models has provided the basis for promoting the process of mine digitization [
3] and intelligence [
4], and obtaining high-precision models reflecting the spatial shape of the orebody is an important guarantee for the estimation of the resource and reserves of an ore deposit.
Due to the complexity [
5] of the spatial shape of orebodies and the limitations of 3D orebody modeling technology, the orebody models built by geological engineers using most of the current mainstream mining modeling software [
6,
7,
8,
9] are often unable to meet the requirements of rapid and refined modeling [
10], which greatly affects the efficiency and reliability of mine resource reserve estimation and mining design. Therefore, the problem of the 3D refinement modeling of orebodies has become an important bottleneck [
11] restricting the digital and intelligent development of mines.
According to the different processes used for the 3D simulation of orebody surface structure, modeling methods can be summarized into explicit modeling [
12], implicit modeling [
13], and hybrid modeling [
14] (i.e., explicit-implicit integration modeling). Implicit orebody modeling technology is the product of the combination of mathematical geology and computer technology. It generates more complete sample data from sparse orebody sampling data through spatial interpolation and uses an interpolation function to express the surface model of the orebody. With the help of surface reconstruction technology, the 3D visual model of the orebody is automatically generated. This approach is favored by experts and scholars in the field of mining modeling because it has the advantages of high automation and dynamic simulation [
15]. Among its applications, Zhong et al. [
16,
17,
18,
19] conducted a large amount of theoretical and applied research on key technical problems such as geological rule constraints, surface interpolation functions, and implicit surface reconstruction methods in implicit orebody modeling.
In practical applications, for any modeling method, the orebody models built using sparse sampling data are essentially inaccurate. However, sampling data are very useful and relatively accurate [
20], providing an important basis for mining development. It should be ensured that the sampling data can accurately and effectively participate in the orebody modeling process. As an important achievement in drilling engineering and geological logging, borehole data contain particularly valuable mine geological information, such as the borehole location, sample lithology, and sample element grade [
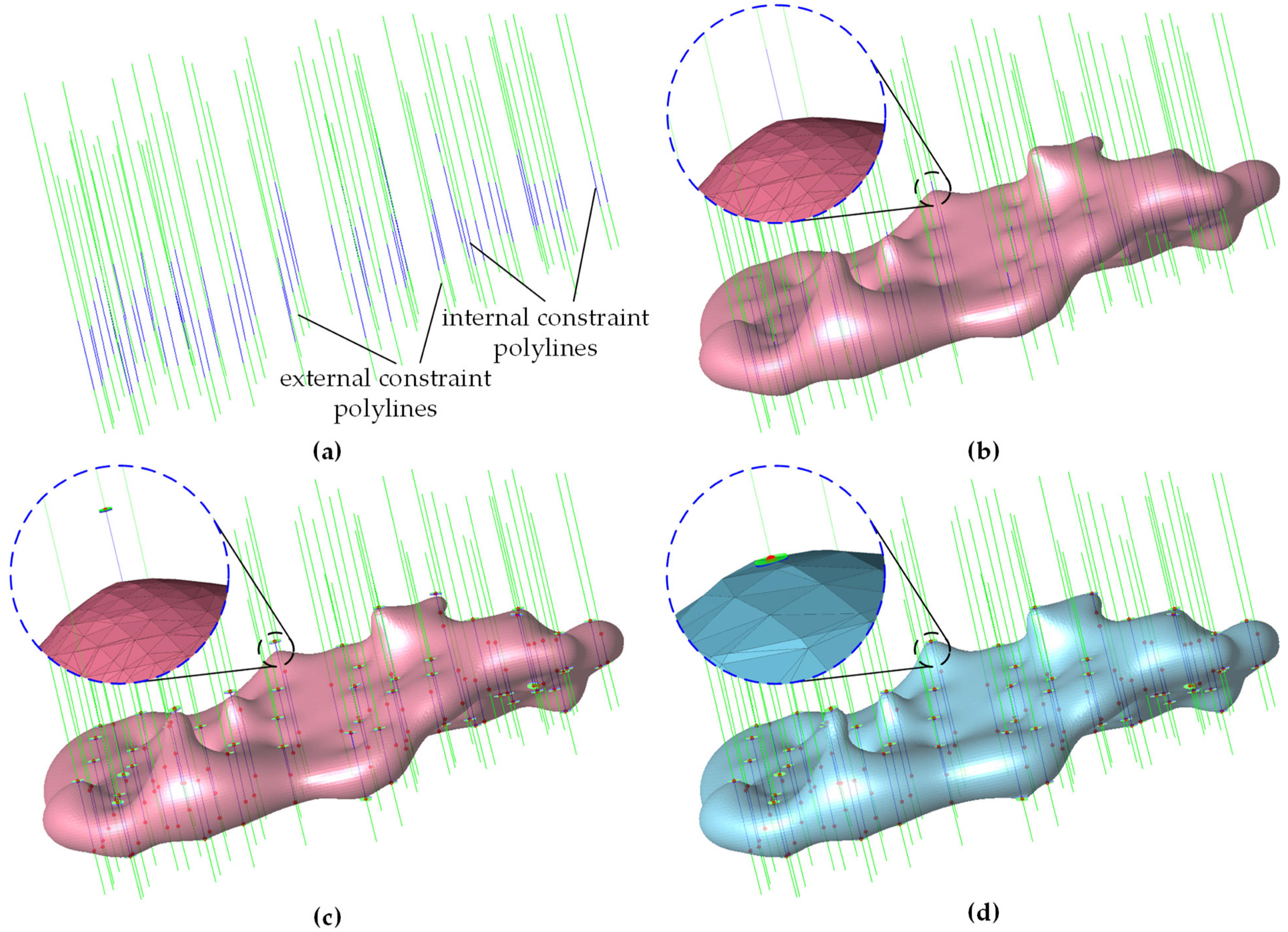
21]. Because borehole data are discrete, the boundary contact points between orebodies and non-mineral rock bodies can be accurately captured after sample combination. It is worth noting that geological interpretation polylines (such as orebody contour polylines), delineated based on the borehole data and prior knowledge, can also be considered to be relatively accurate. From the perspective of model features, geological interpretation points and geological interpretation polylines, including boundary contact points and orebody contour polylines, can be regarded as the feature points and feature polylines of the model. They can also be transformed into constraint points and constraint polylines required for implicit modeling.
Theoretically, according to the different constraints of the spatial constraint data set, the results of implicit modeling can approach the real shape of the orebody model infinitely, in order to establish a more accurate orebody model in line with the constraint data. Because the orebody constraint data are relatively sparse, the mesh model obtained using implicit modeling technology often does not fully conform to the constraint data and features of the model. On the one hand, the implicit modeling results are not completely consistent with the orebody surface constraint data, and there is a gap between the generated model and the constraint points or constraint polylines. On the other hand, the implicit modeling results are inconsistent with the actual boundary of the orebody model, and the generated model boundary is greater than or less than the actual boundary of the orebody model. Generally, a refined 3D structure model can be considered a seamless model with the accurate snapping of feature data and the strict matching of model boundaries [
22,
23]. In general, an orebody model based on implicit modeling technology should exhibit no gaps with the constraint points and constraint polylines, and the boundary contour of the model should be topologically consistent with the actual boundary constraint polylines of the orebody model.
Based on the analysis of the modeling process, there are two main reasons why the implicit modeling results can not accurately snap to the features of the model. One is the implicit surface interpolation process [
24], and the other is the implicit surface reconstruction process [
25]. The accurate interpolation of constraint points can be realized in the process of implicit surface interpolation. However, the constraint points are discrete, and ambiguous constraint points can easily appear [
26], which may lead to interpolation errors or some constraint points being unable to participate in the interpolation process. In addition, in this process, the exact interpolation of constraint points is easy to achieve, but the exact interpolation of constraint polylines is difficult to achieve. In the process of implicit surface reconstruction, the mesh model obtained via surface reconstruction methods (such as the iso-surface extraction method [
27]) generally finds it difficult to accurately capture the given constraint points and constraint polylines [
28,
29]. Although there are some feature reconstruction methods for mesh models [
30,
31,
32], there are still some problems with the application of this approach to orebody models, which need to be further improved.
With the aim of solving the problem of accurately snapping the feature data of an orebody model, we have mainly analyzed the process of implicit surface reconstruction. We have mainly adopted the method of iso-surface extraction for surface reconstruction. Generally, there are two ways to ensure that the extracted iso-surface snaps to the given feature points and polylines, using pre-processing and post-processing, respectively. The pre-processing of model snapping involves snapping the feature points and polylines directly during the process of iso-surface extraction. To preserve model features, some scholars have improved the iso-surface extraction algorithm. Xi et al. [
33] proposed a region-growing-based iso-surface extraction algorithm that can generate high-quality curvature-adaptive meshes and preserve sharp features. Cebral et al. [
34] extended the application of the surface merging algorithm based on the extraction of iso-surfaces from a distance map defined on an adaptive background grid to mesh surfaces with sharp edges and corners.
The post-processing of model snapping involves snapping the obtained mesh model indirectly using feature points and feature polylines after surface reconstruction. Recently, Subedi et al. [
35] provided a critical review of various post-processing methods and categorized them based both on their targeted applications and underlying strategies. Jakob et al. [
36] presented a novel approach to re-mesh a surface into an isotropic triangular or quad-dominant mesh using a unified local smoothing operator that optimizes both the edge orientations and vertex positions in the output mesh. Their algorithm produces meshes with high isotropy, while naturally aligning and snapping edges to sharp features. To sum up, pre-processing requires modifying the iso-surface extraction process for a specific iso-surface extraction method, but the post-processing can be employed for the snapping of the mesh model obtained through any iso-surface extraction method.
In addition, the problem of accurately clipping the model boundary can also be solved by pre-processing and post-processing. A pre-processing stage of model boundary clipping allows the model to be clipped in the process of model surface interpolation by defining boundary geometric constraints or boundary function constraints. For example, Zhan et al. [
37] proposed an interactive method of model clipping for computer-assisted surgical planning. This method can clip the implicit model based on the implicit function of the clipping path, composed of a series of plane widgets, so that surgeons can produce any accurate shape for the clipped model. The post-processing stage of model boundary clipping involves clipping the model boundary through Boolean calculation or mesh processing after the model is generated. Pre-processing requires the modification of the surface interpolation and surface reconstruction process for a specific implicit modeling method, but post-processing can be used to clip the mesh model obtained by means of any implicit modeling method.
Because of the wider applicability of the post-processing technique for snapping and clipping models, in this paper we aimed to take implicit surface constraint data and an orebody mesh model generated via implicit modeling as the input, and examined a method of accurately snapping the feature data of the orebody model and a method of accurately clipping the boundary of the orebody model through post-processing. This will be beneficial in solving a problem associated with the orebody mesh model obtained using implicit modeling technology, namely, that it is not easy to snap the geological feature points and feature polylines obtained based on geological sampling data when using this method. This approach could also provide a solution for the accurate control of the orebody model boundary and thus promote the development of 3D refinement modeling technology for orebodies.
2. Overview of the Method
Generally, the constraint points and constraint polylines required for implicit orebody modeling are transformed based on geological feature points and feature polylines obtained from geological sampling data. However, in the actual modeling process, the problem of inaccurate snapping between the constraint data and the generated orebody mesh model often occurs. Therefore, the constructed orebody model usually does not fully conform to the actual geological sampling data and cannot be used directly.
The implicit modeling method of an orebody mainly includes two processes, namely, implicit surface interpolation and implicit surface reconstruction. We have mainly analyzed the process of implicit surface reconstruction, for which we have mainly adopted the method of 3D iso-surface extraction. Due to defects in the 3D iso-surface extraction algorithm, taking the classical Marching Cubes algorithm [
38] as an example, it is easy to encounter the problem of model ambiguity and a lack of model features. When the vertex threshold of one diagonal plane in a 3D voxel unit is greater than the iso-surface threshold and the vertex threshold of the other diagonal plane is less than the iso-surface threshold, the ambiguity problem usually occurs, as shown in
Figure 1a,b. The direct consequence of ambiguity in 3D iso-surface extraction is the production of holes.
In addition, the Marching Cubes algorithm only includes the intersection coordinates when calculating the intersection information of the iso-surface and voxel unit, and constructs the geometric model in voxel units according to the triangular patches connected by these intersections, without considering the normal direction of the intersection. Thus, when feature information of the geometric model (such as edges, corners, etc.) exists in the voxel unit, the final geometric model will lack these features, as shown in
Figure 1c,d. Therefore, the orebody model reconstructed based on this implicit surface has uncertainty, and is not easy to snap the model features. Even if the feature constraints are accurately interpolated in the implicit surface interpolation process, there are still non-negligible gaps between the reconstructed orebody surface and the interpolated orebody surface, as shown in
Figure 1e.
To solve the above problems, we attempted to establish a method of accurately snapping the feature data of the orebody model and a method of accurately clipping the boundary of the orebody model through model post-processing.
Figure 2 shows the overall flow of this method. Overall, the method proposed in this paper mainly includes the following three parts.
- (1)
Snapping constraint points: Firstly, the snapping range is defined, and the constraint points within the snapping range are projected onto the model surface. Then, the triangular patches where the projection points are located are reconstructed with the projection points as mesh vertexes. Finally, the model and constraint points can be accurately snapped by moving the projection points to the corresponding constraint points.
- (2)
Snapping constraint polylines: For the non-boundary constraint polyline, firstly, the constraint polyline should be projected to the model surface to obtain the projective polyline of the constraint polyline. Then, we search and determine the topologically continuous projective neighborhood on the projective path, extract the contour polylines of the projective neighborhood on both sides of the projective polyline, and delete the matched triangular mesh in the projective neighborhood. Next, the region formed between the constraint polyline and the extracted contour polyline is re-meshed. Finally, the snapping of constraint polylines can be realized by merging all triangular patches on the model surface and unifying the normal direction of the triangular patches. For the boundary constraint polyline, because it is located at the boundary of the model, only the contour polyline inside the projective neighborhood participates in the re-meshing when the region formed between the constraint polyline and the extracted contour polyline is re-meshed.
- (3)
Boundary clipping: Taking the boundary constraint polyline as the boundary, the triangular patches inside and outside the boundary constraint polyline are marked for reservation and deletion, respectively, and the triangular patches marked as deletion are removed to clip the mesh outside the model boundary. During the marking process, the triangular patches adjacent to both sides of the boundary polyline are marked first, and then all unmarked patches are traversed by the breadth-first search algorithm based on the marked patches.
3. Method
3.1. Radial Basis Function Interpolation
Because the radial basis function (RBF) interpolation method [
39] has a better fitting effect on scattered data, this method has been widely used in geological modeling, shape design, and other fields for the interpolation or approximation of scattered data. In this study, for the implicit surface interpolation process of an orebody, we adopted the radial basis function interpolation method. To recover any complex orebody model, it is usually necessary to find a set of basic functions in a function space to approximate the unknown continuous function representing the orebody model.
According to the interpolation theory of spatial scattered data, as long as the function space expanded by the radial basis function of the interpolation point is large enough, the implicit function based on radial basis function interpolation can approximately represent any continuous function of the 3D model. The radial basis interpolation function
can generally be expressed by Equation (1) [
40].
Here, are the distinct interpolation centers of the RBF, are the coefficients to be determined. is a basic function. is a polynomial, and is a set of bases of corresponding polynomial spaces.
The radial basis interpolation function
is usually used for interpolation of the threshold constraints, and
is the function value of the geometric threshold, which should satisfy the equations
Radial basis functions are often fitted via interpolation at the centers
. Interpolation with a function of the form (1) leads to the linear system to be solved for the computation of unknown coefficients
in which
and
Here , is the vector of coefficients of with respect to some basis , is the constraint matrix of , and is the vector of values to be interpolated. In addition, the orthogonality condition also should be satisfied.
3.2. Definitions of the Constraint Data
In the process of implicit orebody modeling, constraint points and constraint polylines are the basic data used for implicit surface interpolation. According to different constraint types and conditions, we specifically define three types of data, namely, constraint points, non-boundary constraint polylines, and boundary constraint polylines, as shown in
Figure 3.
The constraint points are directional interpolation points used for implicit surface interpolation, which are displayed by disks. The tilt direction of the disk is used to express the tangential constraint of the constraint point. The inner and outer sides of the disks are represented by green and blue disks, respectively, which are used to express the normal constraints of the constraint points, as shown in
Figure 3a. The non-boundary constraint polylines are non-boundary interpolation polylines used for implicit surface interpolation, which are displayed with directional stripes. The plane of the red strip is used to represent the tangential constraint of the non-boundary constraint polyline. The plane where the green and blue stripes are located is used to represent the normal constraint of the non-boundary constraint polyline, as shown in
Figure 3b. The boundary constraint polylines are boundary interpolation polylines used for implicit surface interpolation. In contrast with non-boundary constraint polylines, tangential constraints of boundary constraint polylines only contain a part pointing to the inside of the model, as shown in
Figure 3c, which retains only one side of the plane where the red strip is located.
3.3. Snap Constraint Points
Constraint points are implicit function interpolation data, necessary for the implicit modeling of orebodies, including borehole contact points, constraint polyline sampling points and artificial additional points, etc. Snapping constraint points is a basic task required to achieve the accurate snapping of model feature data. The process of snapping the constraint points is also the process of snapping the feature points of the model. We use the mesh processing method to accurately snap the model to the constraint points within the snapping range. The specific steps are as follows.
To distinguish the constraint points
inside and outside the snap range of the mesh model
, the snap range (or the tolerance range) should first be determined, that is, the distance tolerance
from the constraint point to the mesh surface. According to prior experience, the maximum snapping distance
should be within the mesh surface accuracy
, which can generally be set to half of the mesh surface accuracy value (i.e.,
). Before judging whether the constraint points
are within the distance tolerance
, it is necessary to calculate the distance
from the constraint points
to the mesh surface
. The constraint points
should be projected onto the model surface
, generated via implicit modeling, to obtain the projection points
closest to the constraint points
. According to the calculated distance
from the constraint points
to the projection points
, by comparing them with the maximum snapping distance
, the constraint points within the maximum snapping distance are reserved, and the constraint points outside the maximum snapping distance are deleted. Based on the mesh processing method, the snapping of the model to the reserved constraint points can be achieved by moving the projected points to their corresponding constraint points. As shown in
Figure 4, it can be seen that after the constraint points are accurately snapped, the topological relationship of the triangular mesh has changed significantly.
In addition, before the projection points are moved, the projection points should be the vertices of the mesh . There are three cases for the locations of the projection points, including mesh vertices, mesh edges, and mesh interiors. Therefore, if projection points are not vertices of the mesh, it is necessary to reconstruct the triangular patches with the projection points as the mesh vertices.
3.4. Snap Constraint Polylines
3.4.1. Triangulation of Two Polylines
The main step involved in snapping constraint polylines is re-meshing the mesh matched by the constraint polylines. This is essentially a process of triangulating two closed polylines, as shown in
Figure 5a. The key to re-meshing is to avoid errors such as self-intersection of the re-meshing triangular patches. Due to the fact that the re-meshing process of matched meshes is a non-trivial problem, the quality of meshes obtained based on implicit surface reconstruction should be improved as much as possible, otherwise, the reliability of model snapping will be affected. We considered determining the rules of triangulation by matching the geometrical trend of two polylines to optimize the triangulation mesh quality. Triangulation rules refer to the pairing rules that the triangular patches constructed by the vertices of the first polyline and the second polyline should satisfy, such as the minimum perimeter method [
41], the minimum area method [
42], and the synchronous forward method [
43], etc.
The specific steps of the method are as follows. A shown in
Figure 5b, firstly, the initial matched points (
and
) of the first polyline
and the second polyline
should be determined. The initial matched points are obtained by searching for the closest points of the two polylines. Secondly, the position where the local shape of the polyline changes greatly should be preprocessed. The feature polylines are sampled to ensure that the point density of the two polylines is basically the same, and then the directions of the point columns (
and
) of the two polylines are aligned. The larger turning position of the polyline should be adjusted to ensure that the shape trends of the two polylines are basically the same, as shown in
Figure 5c. Thirdly, the corresponding vertices of the two polylines are matched according to the triangulation rules. Starting from the initial matched points (
and
), the triangular patches constructed by taking two points on one polyline and one point on the other polyline should satisfy the corresponding triangulation rules, as shown in
Figure 5d,e. Finally, the triangular mesh topology relationship is constructed based on the results of the matched vertices to obtain a re-meshed mesh model, as shown in
Figure 5f.
3.4.2. Snap Non-Boundary and Boundary Constraint Polylines
According to whether the constraint polylines are located at the boundary of the orebody model , the constraint polylines are divided into boundary constraint polylines and non-boundary constraint polylines . The non-boundary constraint polylines mainly affect the surface morphology of the model . Therefore, within the tolerance range, the actual modeling needs can be satisfied only if the model is snapped to the sampling points of the non-boundary constraint polylines . Based on this, when snapping non-boundary constraint polylines , the method of snapping constraint points can be used without eliminating the existing gap between the non-boundary constraint polylines and the model .
Since the boundary constraint polyline plays the role of controlling the boundary of the orebody model , there should be no gap between the model and the boundary constraint polyline . Then, the boundary constraint polyline should be snapped accurately, that is, the boundary contour of the model should be topologically consistent with the actual boundary constraint polyline of the orebody model. Considering the principle of fine 3D modeling, to improve the geometric quality and precision of the model, we require the realization of the accurate snapping of all constraint polylines of the model. That is, there should be no gap between the snapped model and all constraint polylines (including non-boundary constraint polylines and boundary constraint polylines ), and the constraint points and mesh edges on the constraint polylines should be consistent with the mesh of the orebody model .
Based on the above idea regarding the snapping of the boundary constraint polylines, the steps involved in snapping non-boundary constraint polylines are as follows. As shown in
Figure 6, firstly, the non-boundary constraint polyline
should be projected onto the model
generated based on implicit modeling, and a similar path with the same number of vertices as the non-boundary constraint polyline
is obtained, which is defined as the non-boundary projective polyline
. Secondly, based on the location of the projective points on the non-boundary projective polyline
, the set of topologically continuous triangular patches
on the path of the non-boundary projective polyline
is searched, and the region formed by the set of triangular patches
is defined as the projective neighborhood
of the non-boundary constraint polyline
. Then, the contour polylines of the projective neighborhood
on both sides of the non-boundary projective polyline
are extracted as
and
, and the set of triangular patches
is deleted. Next, taking the constraint point on the non-boundary constraint polyline
as the mesh vertex, the projective neighborhood
is triangulated between
,
, and
, respectively, using the re-meshing method between two polylines to generate a new set of triangular patches
. Finally, the new model
is generated by merging the re-meshing triangular patches
in the projective neighborhood
with the other patches of the model
, and the normal direction of all triangular patches is unified, which can achieve the accurate snapping of the orebody model with the non-boundary constraint polyline.
The snapping process of the boundary constraint polyline can be considered a special case of snapping of the non-boundary constraint polyline. As shown in
Figure 7, compared with the non-boundary constraint polyline, only the contour polyline inside the projective neighborhood
participates in re-meshing when the projective neighborhood
of the boundary constraint polylines
is re-meshed.
3.5. Boundary Clipping
The orebody has a specific shape and volume. To limit the scope of the model, it is necessary to construct the maximum bounding box in the coordinate system during the modeling process. Generally, the maximum bounding box is a 3D space with external geometric constraints. If the shape of the orebody model is equiaxed or columnar, the model can usually meet the modeling requirements when the maximum bounding box is larger than the model boundary. The model generated by means of the implicit modeling method is a spatially continuous closed entity. If the orebody model is platelike (such as a layer-type or vein-type model), taking a layer-type orebody as an example, the upper and lower models usually need to be built separately and then merged.
In fact, one can accurately control the upper and lower layers of the model within the boundary using the explicit modeling method to model the sub-meshes separately, but this depends greatly on human–computer interactions. The orebody model constructed using the implicit modeling method is essentially obtained via spatial interpolation. The spatial constraint data set determines the spatial morphology of the model. When the boundary range is controlled only by the maximum bounding box of the model, the size of the generated model usually does not conform to the actual boundary size of the model. Because the boundary of the orebody model is very irregular, it is very difficult to accurately construct the constraint of the maximum bounding box at the boundary.
It is worth noting that if the boundary of the orebody model can be determined in advance, the boundary range can be controlled in the implicit modeling process by defining boundary constraint polylines to provide one-way tangential constraints for the model, as shown in
Figure 7a. If the boundary polyline of the orebody model is determined only after the model is generated, the part outside the model boundary can be clipped through post-processing. In this paper, a method of model boundary clipping is proposed to solve the problem of boundary mismatch in some orebody models.
To ensure the clipping effect, it is necessary to satisfy the following conditions before clipping boundaries. On the one hand, the boundary polyline should be closed, and the direction of the boundary polyline should be consistent with the direction of the boundary constraint polyline. On the other hand, the model should snap accurately to the constraint polylines. The steps involved in clipping boundaries are as follows, as shown in
Figure 8 and
Figure 9. First, a seed point is selected on the boundary polyline
. According to the sequence of points on the boundary polyline, the triangle edge formed by the seed point and its next point is defined as the initial edge
. Each triangle edge forming the boundary polyline is defined as the boundary triangle edge
. In addition, the direction of the boundary polyline can be directly judged according to the reserved side of the red tangential strip. Second, along the vector direction of the boundary polyline
, the whole boundary polyline is traversed from the initial edge. One can calculate the vector product of the direction vector and the normal vector of the boundary triangle edge
to obtain the normal vector of the normal plane where the boundary triangle edge
is located, as shown in Equation (6).
where
is the direction vector of the boundary triangle edge
,
is the normal vector of the boundary triangle edge
, and
is the normal vector of the normal plane where the boundary triangle edge
is located, pointing to the inside of the model boundary.
Then, the normal vector
and a point
on the triangle edge
are substituted into the point-normal form equation of a plane to obtain the plane Equation (7) of the normal plane
where
is located.
For the triangular mesh of the topological manifold, a triangle edge has two adjacent triangular patches, denoted as and . To facilitate the processing of triangular patches, we add a label for each triangular patch, marked as . indicates that the triangular patch will be retained and indicates that the triangular patch will be deleted. Then, the vertex coordinates of the triangular patches and are substituted into Equation (7). If the function values of all three vertices of the triangular patch or are greater than or equal to 0, then the label value of the triangular patch is set to 1 (i.e., ). Otherwise, we set the label value of the triangular patch to 0 (i.e., ). Then, we set the unlabeled triangular patches adjacent to it to the same label. Next, based on the existing labels, the breadth-first search algorithm (i.e., BFS) is used to traverse all unlabeled triangular patches. We set the label value of the unlabeled triangular patch adjacent to the triangular patch with or to 1 or 0, respectively. Finally, we delete all triangular patches with to clip the boundary of the orebody model. In addition, the orebody model may have more than one boundary. The above method can be applied to clip multiple boundaries simultaneously.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}