1. Introduction
Hill’s problem is a particularly limiting case for the restricted three-body problem (RTBP). Researchers can obtain the Hill problem by using some scales and transformations while taking limits, as mass parameter tends to zero. Hence, it is an interesting application based problem, and many scientists have studied different versions of this problem by considering different perturbation forces in the classical Hill problem. This means the primary bodies possess point masses and move in circular orbits around their common centre of mass or in elliptical trajectory, while the third body moves in space under the effect of gravitational forces of the primary bodies without affecting their motions [
1,
2,
3,
4].
In [
5], the authors have studied the Hill stability of satellites by utilising the RTBP configuration. However, in [
6,
7,
8], the authors have studied the same configuration with various perturbations as radiation pressure and oblateness of the primaries. Additionally, in [
9,
10,
11,
12], the authors have explored and analysed the Hill four bodies problem with its application to the Earth–Moon–Sun system and satellite motion about binary asteroids. In this context, Hill’s problem, with oblate secondary in three dimensions, has been illustrated in [
13], where the equilibrium points and their stability have been determined.
Further to the precedent work, the radiation pressure effect of the bigger primary and the secondary oblateness on the new version of Hill’s problem are investigated in [
14], where the authors illustrated that their study is more appropriate for astronomical application. They also used iterative methods to identify the locations of equilibrium points and used the linear stability analysis method to examine their stability properties. They proved that all the equilibrium points are unstable for this model. In [
15], the authors investigated Hill’s problem because space missions required the knowledge of orbits with some properties, where periodic solutions are illustrated numerically due to the non-integrability of this problem.
With the continuous contributions analysing the Hill body problem, the existence of positions and stability of collinear equilibrium points in its generalized version under radiation pressure and oblateness effects are studied in [
16]; the authors also performed the basins of attraction through the Newton–Raphson method for many values of used parameters. Furthermore, in [
17] the author investigated the basins of convergence in the aforementioned problem; his numerical analysis revealed the extraordinary and beautiful formations on the complex plane. In [
18], the authors have performed the Hill’s problem by assuming the primaries as the source of radiation pressure; they have determined the asymptotic orbits at collinear points and the same to the lyapunov periodic orbits.
The spatial or planar restricted three-body problem (RTBP) under any kind of perturbation is called the perturbed model. Otherwise, it can be called the phot–gravitational, relativistic, or quantized problem in the case that the system is analysed under the effect of radiation pressure, relativistic, or quantum corrections perturbation, respectively [
19,
20,
21,
22,
23]. The analysis of the spatial quantized RTBP (i.e., the spatial of RTBP under the effect of quantum corrections) is studied in [
24], where the locations of equilibrium points and the allowed and forbidden regions of motions are examined. Furthermore, the quantized RTBP is developed to construct a new version of the Hill problem [
25], where the equations of motion for the Hill problem are evaluated under the quantum corrections. Thus, the obtained system is called quantized Hill problem (QHP).
Recently, in [
26], the authors investigated the Hill’s problem by assuming that the infinitesimal body varies its mass according to Jeans law, they investigated numerically the location of equilibrium points, regions of motion, and basins of attraction and also examined the stability status of these points by using Meshcherskii’s space–time transformation. Furthermore, in [
27] the authors investigated the differences and similarities among the classical perturbation theory, Poincaré–Lindstedt technique, multiple scales method, the KB averaging method, and averaging theory, while the latter is used to find periodic orbits in the framework of the spatial QHP. They stated that this model can be utilized to develop a lunar theory and families of periodic orbits.
In the framework of RTBP, which can be reduced to the Hill model, some effective contributions are outlined in [
28,
29,
30], where the effects of lack of sphericity body shape and radiation pressure on the primaries are studied. In addition, the effect of mass variation in the frame of RTBP is investigated in [
31,
32,
33,
34], where the authors have also studied the impact of these perturbations on the positions of equilibrium points, Poincaré surfaces of section, regions of possible and forbidden motion, and basins of attraction and examined the stability of these equilibrium points such that it is proven that, in most cases, these points are unstable.
In general, the Hill body problem has a great significance in both stellar and solar systems and in dynamical astronomy; it has received a considerable analysis in its own literature. Primarily, it is formulated as a model to analyse the Moon’s motion around the Earth under the effect of Sun perturbation. Furthermore, its model, with simple modifications, can also serve as a model for the motion of a star in a star cluster under the created perturbations from the galaxy. The importance of this problem motivated us to study and analyse the Hill body problem under the perturbation of quantum corrections.
In this work, the QHP is considered to study the existence of equilibrium points alongside examining their stability. Under the effect of quantum corrections, the locations of equilibrium points have been analysed. In particular, we have studied three different cases which give all possible locations, where two points are emerging from the first case and they are considered a generalization for the classical two points, as well as four points from the second case, while the third case does not provide any realistic locations. Hence, we have obtained four new equilibrium points related to the quantum perturbations. Furthermore, We demonstrate that the obtained result in the first case can be reduced to the classical result, while the four new points will disappear in the absence of quantum perturbation.
The paper is organized in six sections as follows: The literature surrounding the problem is given in
Section 1. The equations of motion are preformed in
Section 2. In
Section 3, we have determined the positions of equilibrium points. The stability of equilibrium points are studied in
Section 4. Furthermore, the numerical results are estimated in
Section 5. Finally, the conclusion of the work is presented in
Section 6.
3. Analysis of Equilibrium Points
The equilibrium points can be obtained by equating all the derivatives with respect to time by zero in system (
5), hence
In the classical case, we mean that the quantum effect will be neglected, the parameter , then the equilibrium points are given by where and , hence .
To find the equilibrium points under the quantized effect (
and
), we have to find the solutions of System (
6); there are some cases which can be applied to analyse the solutions of this system.
- First case:
, then , and .
In this case, one obtains
Equation (
7) gives a quintic equation in the following form
The solution of the fifth degree equation is generally too complicated, however the equation has at least one real root. Instead, numerical approximations can be evaluated using a root-finding algorithm for polynomials.
In fact, it is not our aim to find a solution of a quintic equation, but we aim to find the quantum corrections’ impact on the locations of equilibrium points. Thus, we impose that
, where
is a very small quantity which embodies the effect of quantum correction on the locations of equilibrium points after substituting
into Equation (
7) or Equation (
8), keeping all terms with coefficients of
and
only, and neglecting all terms with an order of
or more. Hence,
will satisfy two values,
and
, which are given by
Substituting
in Equation (
9), one obtains
As
and
are very small quantities with order of
and
, respectively, we keep only terms with order of
and
and neglect the remanning terms. Thereby, the approximated values of the perturbed parameter
are governed by
The parameter of
embodies the effect of the quantum corrections and it must equal zero in the absence of these corrections, i.e., when
and
. However, the obtained solution of
does not equal zero and gives an inconvenient solution; thus, the value of
is rejected. Hence, the proper approximated value of the parameter
is given by
Utilizing Equation (
10) with relation to
, then the distance
at the quantized equilibrium point is
As , we have two possible values for x and , . Thus, the quantized equilibrium points are and , which is considered a generalization of the classical case and can be reduced to the classical one when and .
- Second case:
, then , and .
This case could occur when the parameters of quantum corrections are negative, i.e., the values of
and
are negative [
24]. Hence,
when the solutions of the following quadratic equation are possible
The possible solutions of Equation (
14) are
The solutions in Equation (
15) are valid if the values of
and
are positive. To investigate this property, first we remark that
,
, and
have values with order of
,
, and
. Then, the approximated series solutions of Equation (
15) can be written as
It is clear that from Equation (
16) the values of
and
are very small and positive when
and
, respectively, take negative values. Then, we have four new equilibrium points corresponding to the second case under the perturbation of quantum corrections, where
and
. The new four points are
,
,
, and
- Third case:
, then , and .
In this case, one obtains
Equation (
17) gives also a quintic equation in the following form
To find the solution of Equation (
18), we impose that
, where
is very small quantity which embodies the effect of quantum correction on the locations of equilibrium points in the current case after substituting
into Equation (
18) and keeping all terms with coefficients of
and
only, neglecting all terms with order of
or more. Hence,
will satisfy two values,
and
, which are given by
It is clear that from Equation (
19) the obtained values of the perturbation parameter
is complex, which mean that the assumption of the third case does not lead to realistic situations. Thus, this case does not give real equilibrium points and it is rejected.
4. Stability Status of Equilibrium Points
Next, to check the equilibrium points stability, we have to write the equations of motion in to phase space. Thus, System (
5) can be rewritten in the following form
where
Here, the
Jacobian integral can be rewitten as
The motion in the proximity of any of the equilibrium points
and
can be studied by putting
, and
in Equations (
20) and (
21). Then, we can rewrite the equations of motion in the phase space as
where the superscript zero means that the second derivatives of
H are evaluated at the related equilibrium point.
The characteristic polynomial of Equation (
23) will be
where
We will examine the stability of equilibrium points in two cases only because there are no equilibrium points in the third case.
4.1. First Case
In this case the equilibrium points
and
are in symmetry about the
Y-axis, therefore it is enough to examine the stability of only one of these two points. In this context, we have to evaluate the values of
corresponding to
, which are as follows:
From Equations (
24) and (
26), we find
Here, , , and show that the sign changes occur one at a time time, thus there exists at least one positive real root. Therefore, the equilibrium point will be unstable in this case.
4.2. Second Case
In this case, the equilibrium points
and
are symmetrical about the
X-axis, hence it is sufficient to examine the stability of only two of these four points. Additionally, we have to evaluate the values of
and
,
and 5 corresponding to
and
, which are as follows:
and
From Equations (
24) and (
28), we find
Here, , , , and , where , show that the sign changes occur one at a time, thus there exists at least one positive real root. Therefore, the equilibrium point will be unstable in this case.
5. Numerical Results
In this section, we illustrate some dynamical properties numerically for the proposed system (i.e., the quantized Hill system) such as the equilibrium points and the allowed and forbidden regions of motion under the quantum corrections. In order to avoid the reparation, we will present the numerical analysis on the first case of equilibrium points; the same procedure can be carried out for the second case.
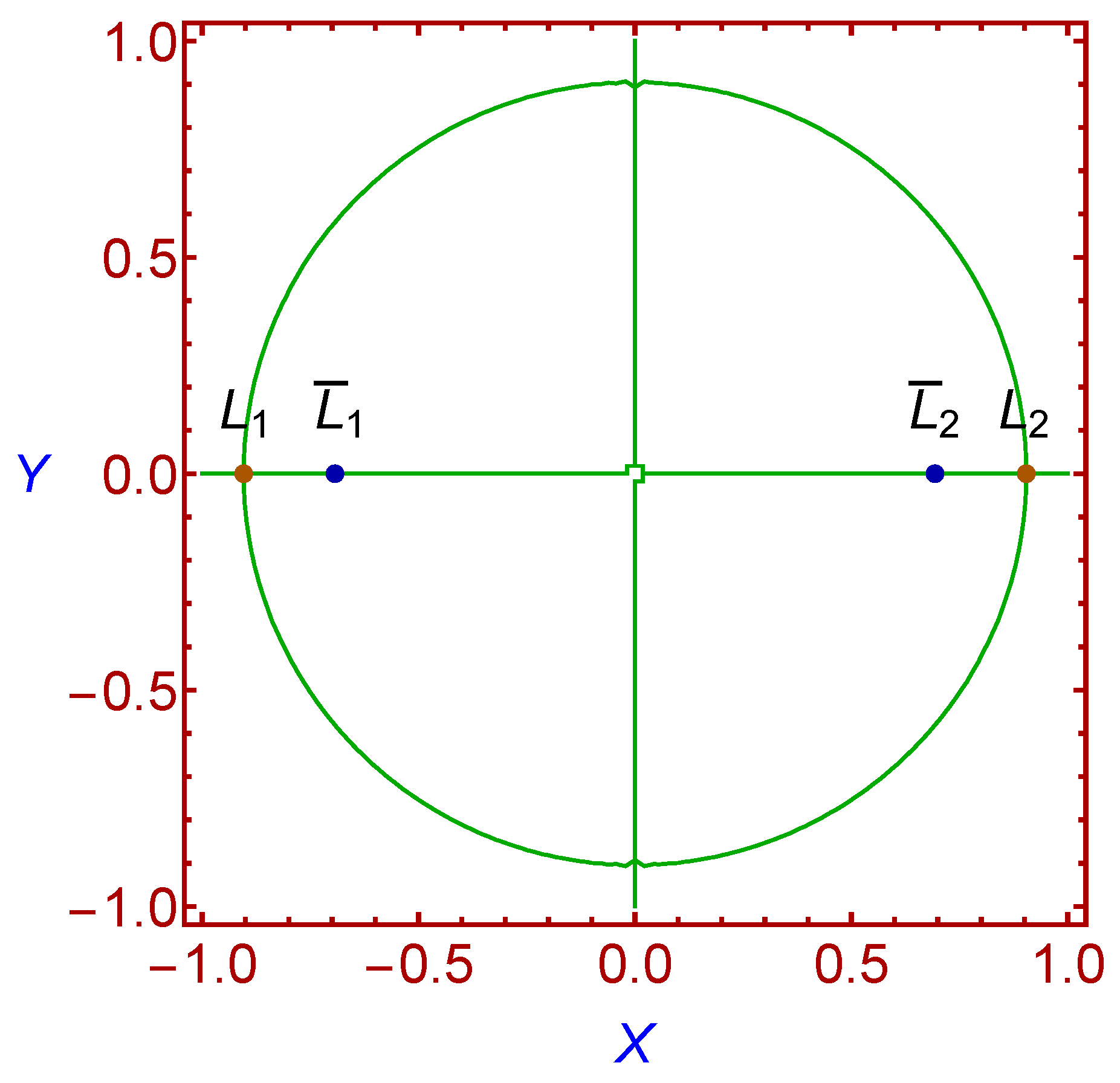
The locations of equilibrium points are shown in
Figure 1, for which we have taken zero as the derivatives with respect to time in Equation (
5). Then, with the help of the well-known
Mathematica Software, the collinear equilibrium points
and
under the quantum corrections, as well as the unperturbed equilibrium points
and
, are estimated numerically. Both points exist either side of the origin on the
X-axis and are in symmetry about
Y-axis. However, we mark that the distance between the perturbed points is more than the distance between the unperturbed points. Of course, this perturbation will affect the other dynamical properties.
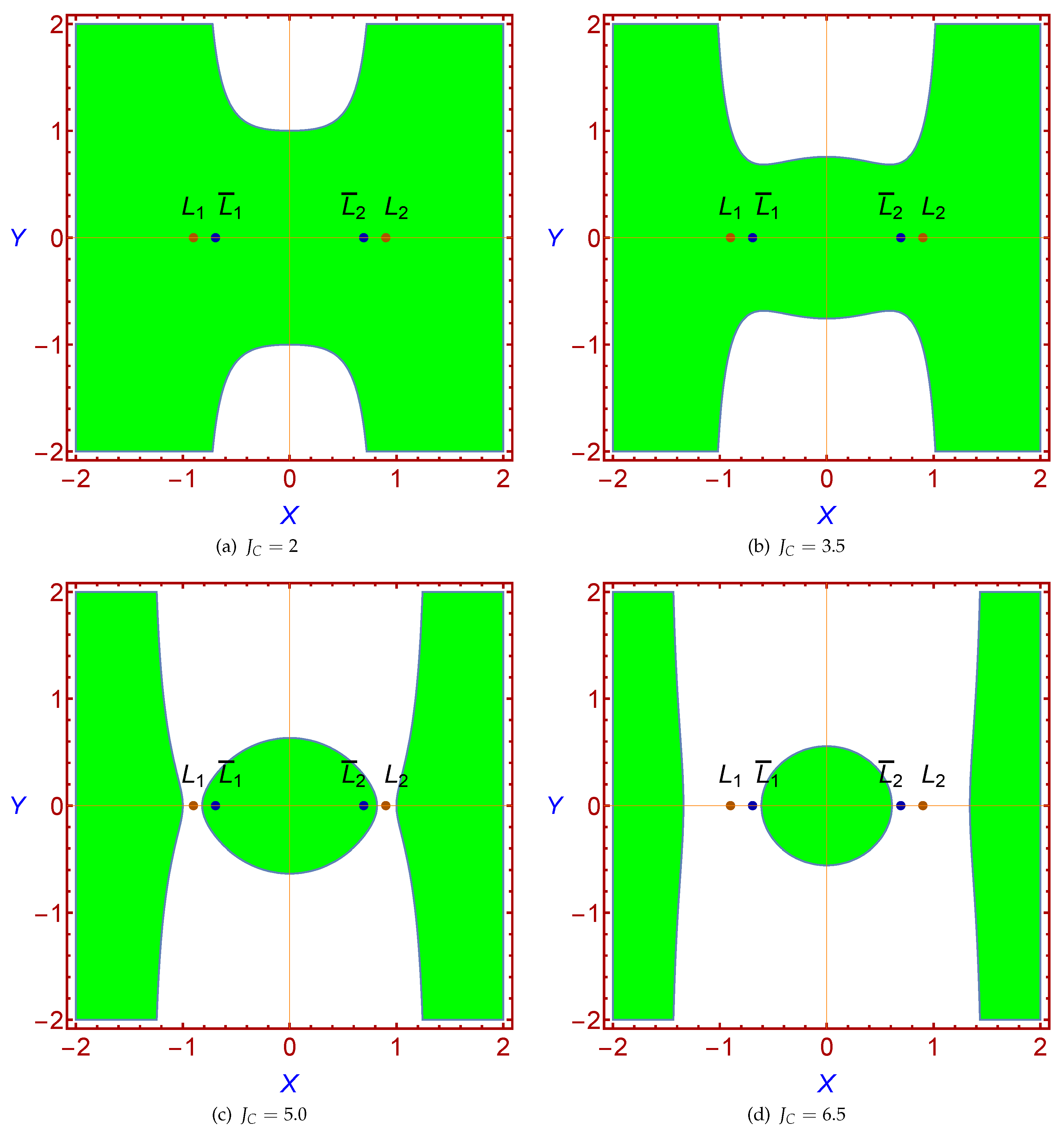
One of the most dynamical properties which can be identified by the
Jacobian integral is the possible and forbidden regions of infinitesimal body motions, which are restricted to the locations of
where
v is the velocity of the infinitesimal body. Hence, Equation (
22) can be used to determine the allowed or forbidden regions of motions, as in
Figure 2, where the coloured green areas identify the regions of possible motions, while the white determine forbidden regions.
It is clear from
Figure 2a that when the
Jacobian constant is relatively small there is one large area for possible region of motion, and the body could move from any region point to another (or from
(
) to
(
)). When
becomes larger, the forbidden region is extended, as in
Figure 2b. With further increase in the value of
, the forbidden region becomes larger, while the possible region of motion forms three septate areas starting from the perturbed equilibrium points
and
, as in
Figure 2c. In addition, the body cannot move from one to another, because the three areas are not connected. With further increase in the value of
, the inner and two outer regions decrease while the separate areas start from the unperturbed equilibrium points
and
, as in
Figure 2d. We remark that the infinitesimal can never move from one allowed region to another, and the body will be trapped inside one of the possible regions of motion with the relative large values of the
Jacobian constant, as in the case of
Figure 2c,d.
The condition of does not provide information about the size or shape of the orbit or the trajectory of the body; it can only identify the region where the infinitesimal body could move.
6. Conclusions
In this work, the quantized Hill problem is considered to study the existence of equilibrium points alongside examining their stability. Under the effect of quantum corrections, the locations of equilibrium points have been analysed, we have studied three different cases which give all possible locations, where two points emerge from the first case, taking a place on the X-axis, and four points dos so from the second case and lie on Y-axis. The third case does not provide a realistic location. Hence, we have obtained four new equilibrium points related to the quantum perturbations.
In this context, we have tested the stability status of all of the equilibrium points and we have found that all points are unstable. Further, we have illustrated the locations of equilibrium points for the first case and the related allowed regions of motion numerically. Similarly, we can perform these illustrations for the second case. Here, we found two equilibrium points which are either side of the origin on the
X-axis and in symmetry about the
Y-axis, as in
Figure 1. The regions of possible and forbidden motion are investigated for different values of
Jacobian constant, as in
Figure 2.
Finally, we demonstrate that the obtained result in the first case is a generalization of the classical one, and it can be reduced to the classical result, while the four new points will disappear in the absence of quantum perturbation. The regions of possible motions decrease with the increasing value of Jacobian constant and these regions will form three separate areas. Thus, the infinitesimal body can never move from one allowed region to another, and it will be trapped inside one of the possible regions of motion with the relative large values for the Jacobian constant.




{kind=link}
{kind=link}

