
Structure Preserving Uncertainty Modelling and Robustness Analysis for Spatially Distributed Dissipative Dynamical Systems


Abstract
:1. Introduction
When is discretization of spatially distributed systems good enough for control?
When are reduced order models of spatially discretized and distributed systems good enough for control?
How to model uncertainties for spatially discretized and reduced order spatially distributed dissipative dynamic systems that are suitable for practical robust control?
- (i)
- Systematic modelling of the uncertainty and model order reduction (MOR) at the level of a subsystem gives both modelling freedom and the ability for obtaining less conservative uncertainties on the level of a subsystem.
- (ii)
- For a special class of interconnected dissipative dynamical systems—by employing a newly discovered structure-preserving subsystem partitioning technique—uncertainty at the subsystem level can be reduced, while at the same time preserving the structure and keeping the order of interconnected system low.
2. Materials and Methods
2.1. Preliminaries and Notation
2.2. Creating State Space Subsystems from Spatially Discretized Submodels
2.3. System Interconnection
2.4. Structure Preserving Balanced Truncation Method
| Algorithm 1:Generalized square root balanced truncation method. |
For the subsystem defined with the Equation (3) with the transfer function calculated as compute the reduced order system.
|
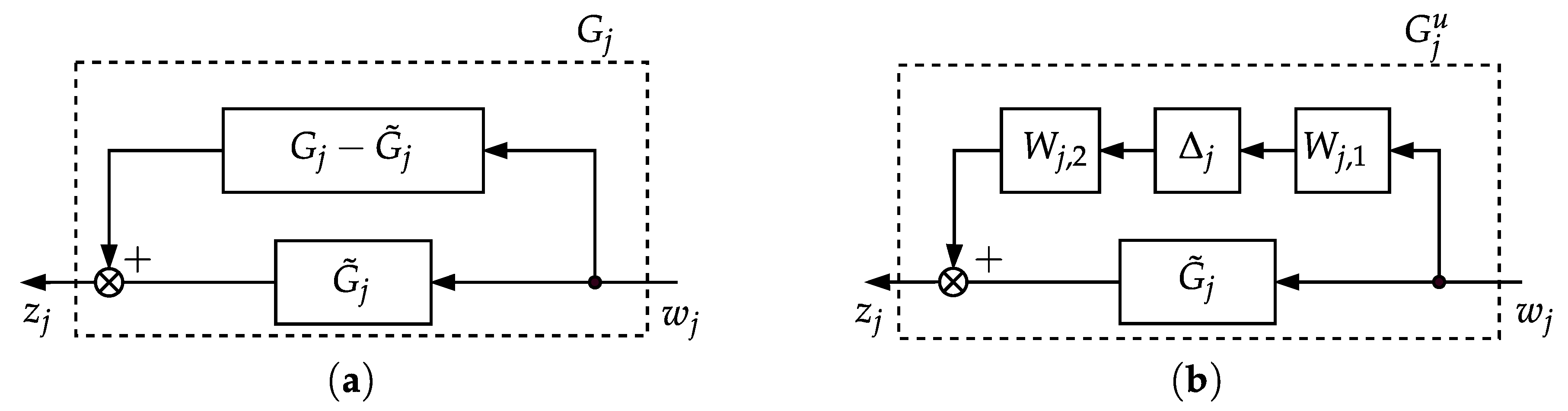
2.5. Additive Uncertainty Model
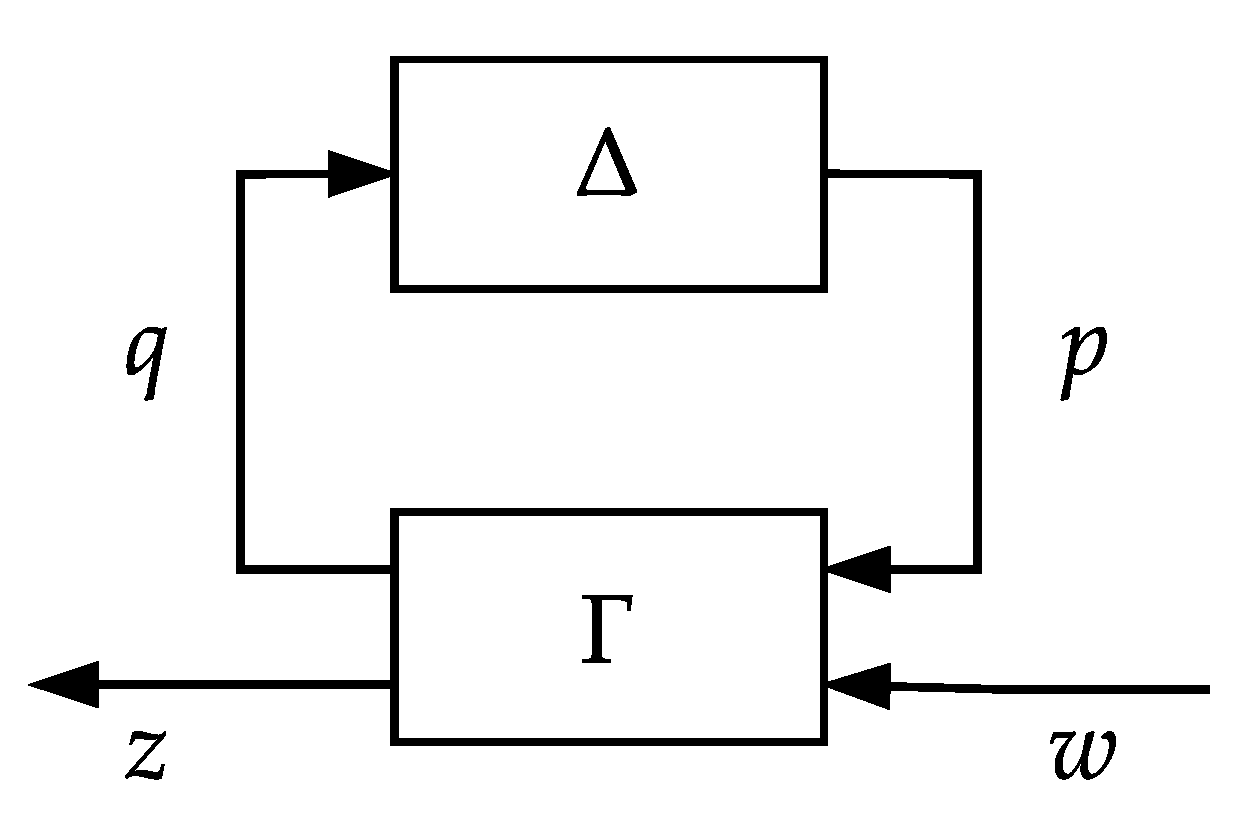
2.6. Robustness Analysis Using Integral Quadratic Constraints
- 1.
- .
- 2.
- There exists a matrix such that
- non-strict inequalities, if, in addition, the pair is controllable,
- equalities, if, in addition, is Hurwitz and the pair is controllable.
- 1.
- for all the interconnection defined by Equation (12) is well posed;
- 2.
3. Results
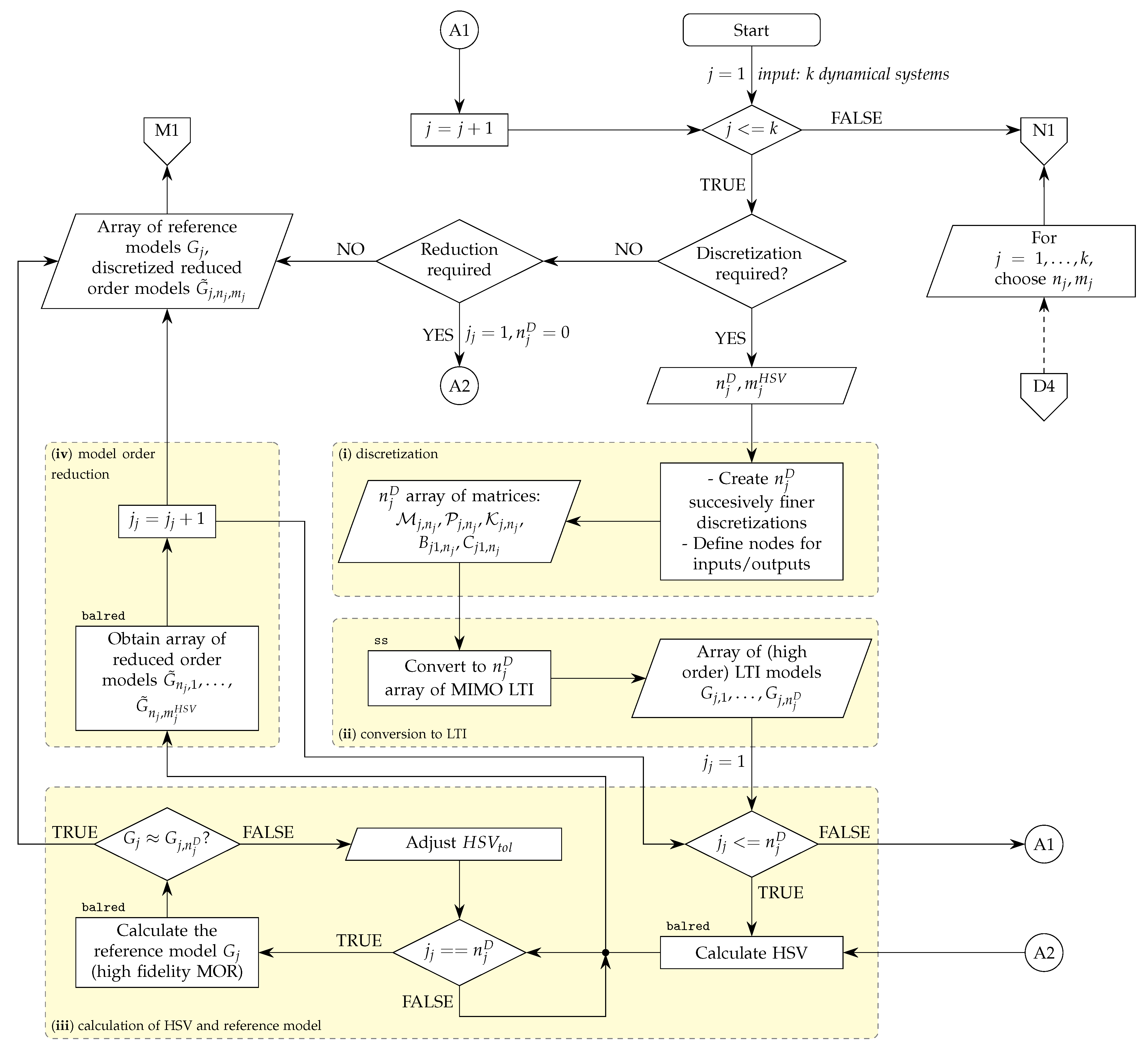
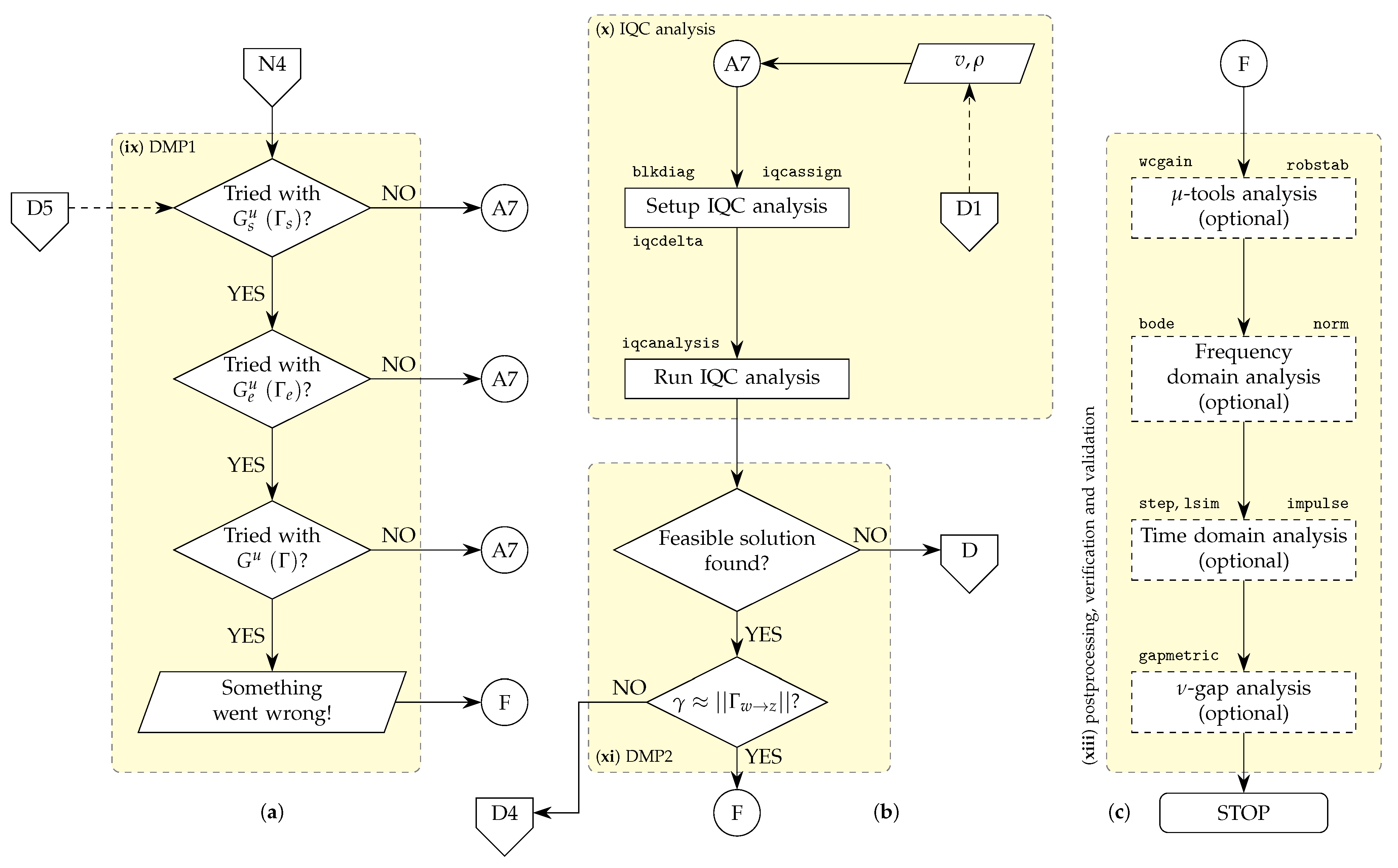
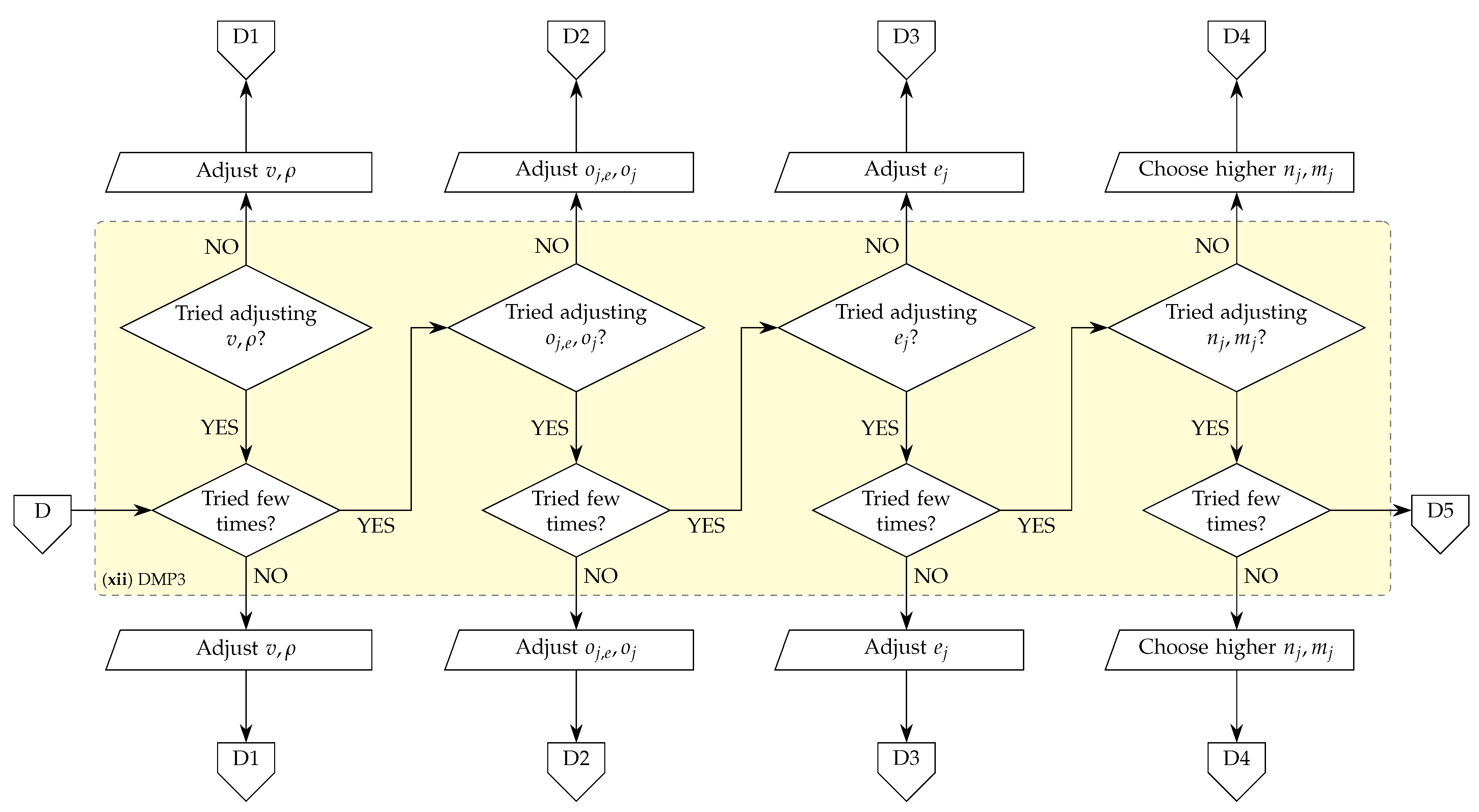
3.1. Design Procedure
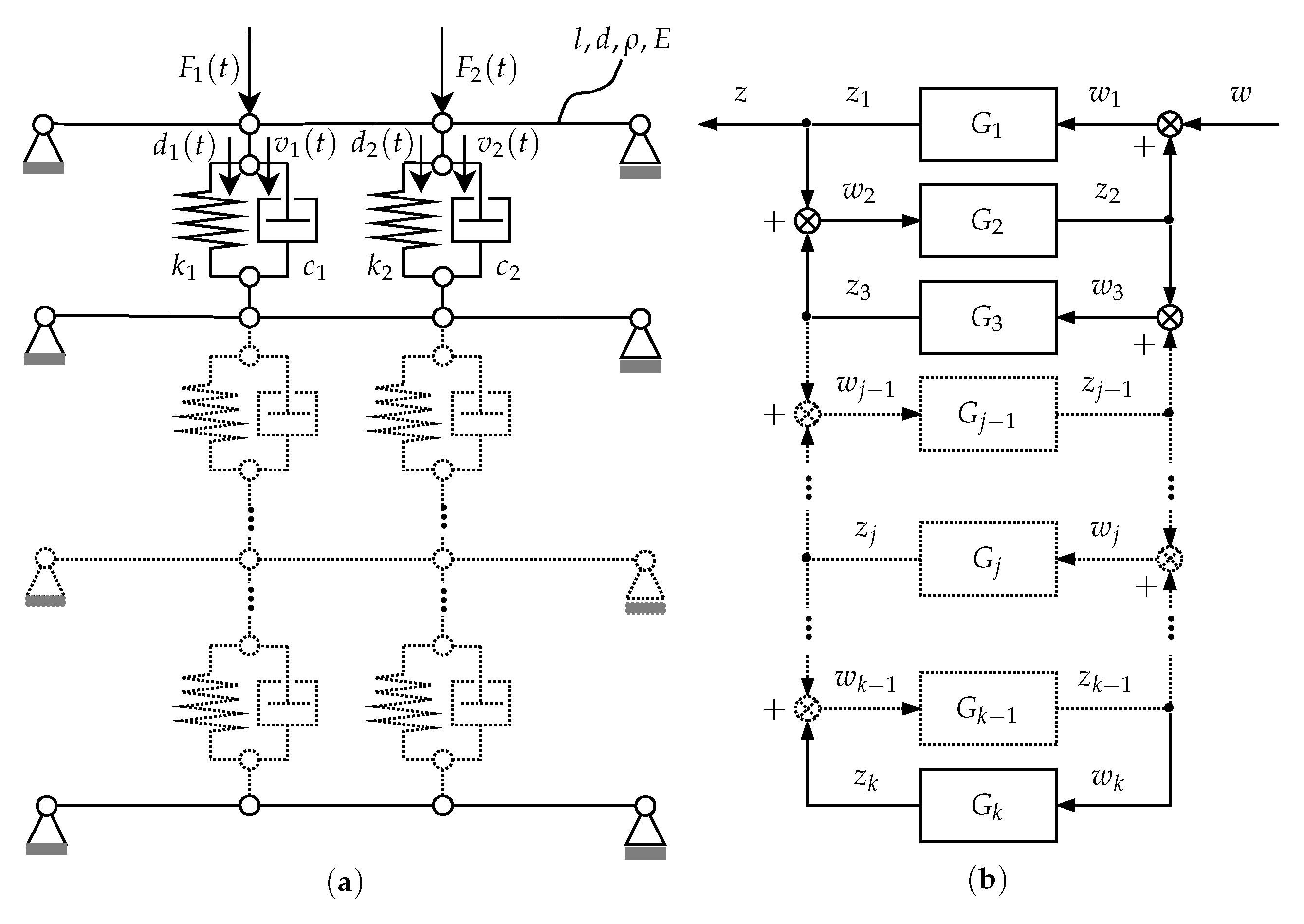
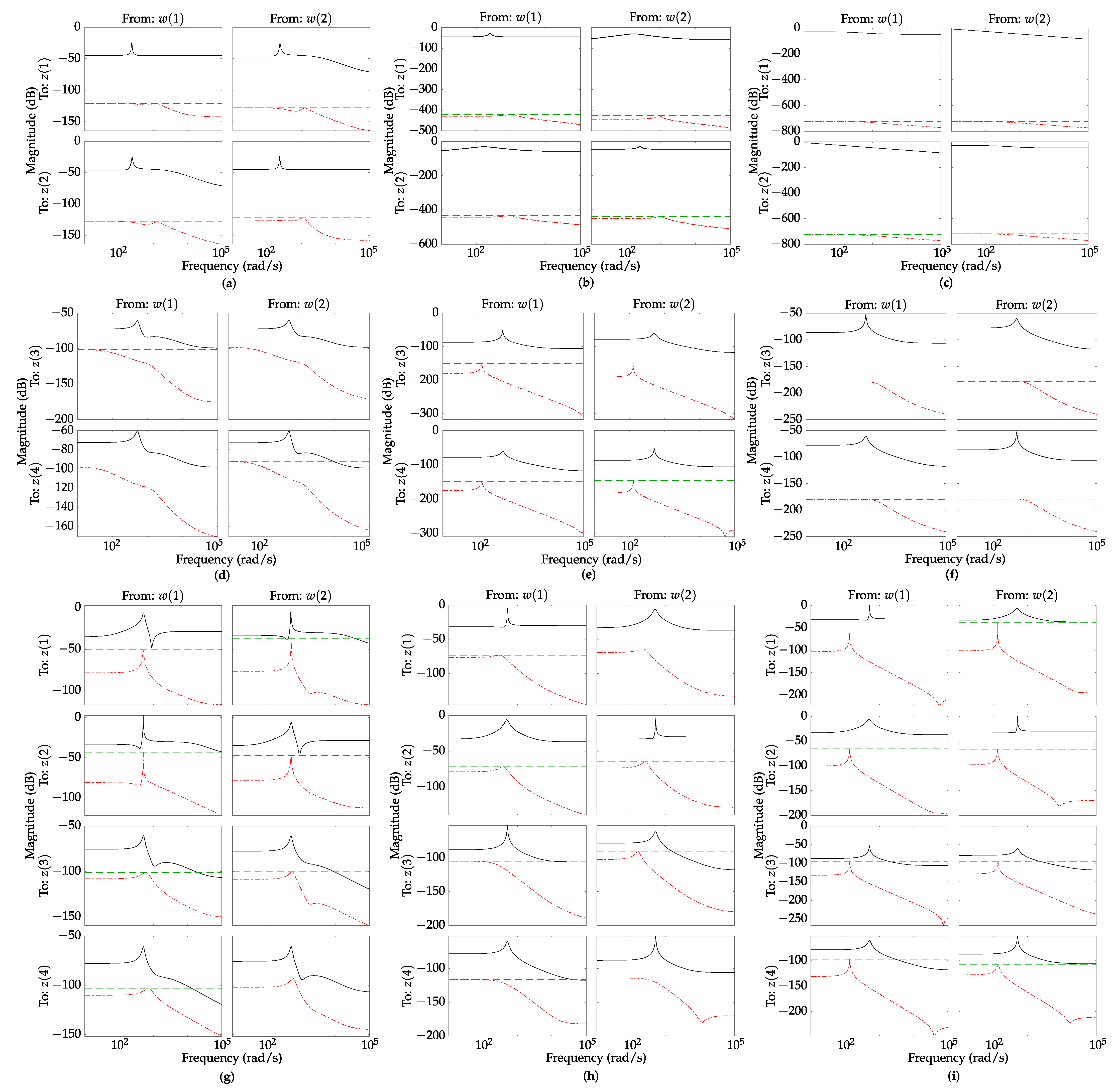
3.2. Numerical Example: Series of Simply Supported Euler Beams Mutually Interconnected by Springs and Dampers
4. Discussion
4.1. On the Choice of Weight Design
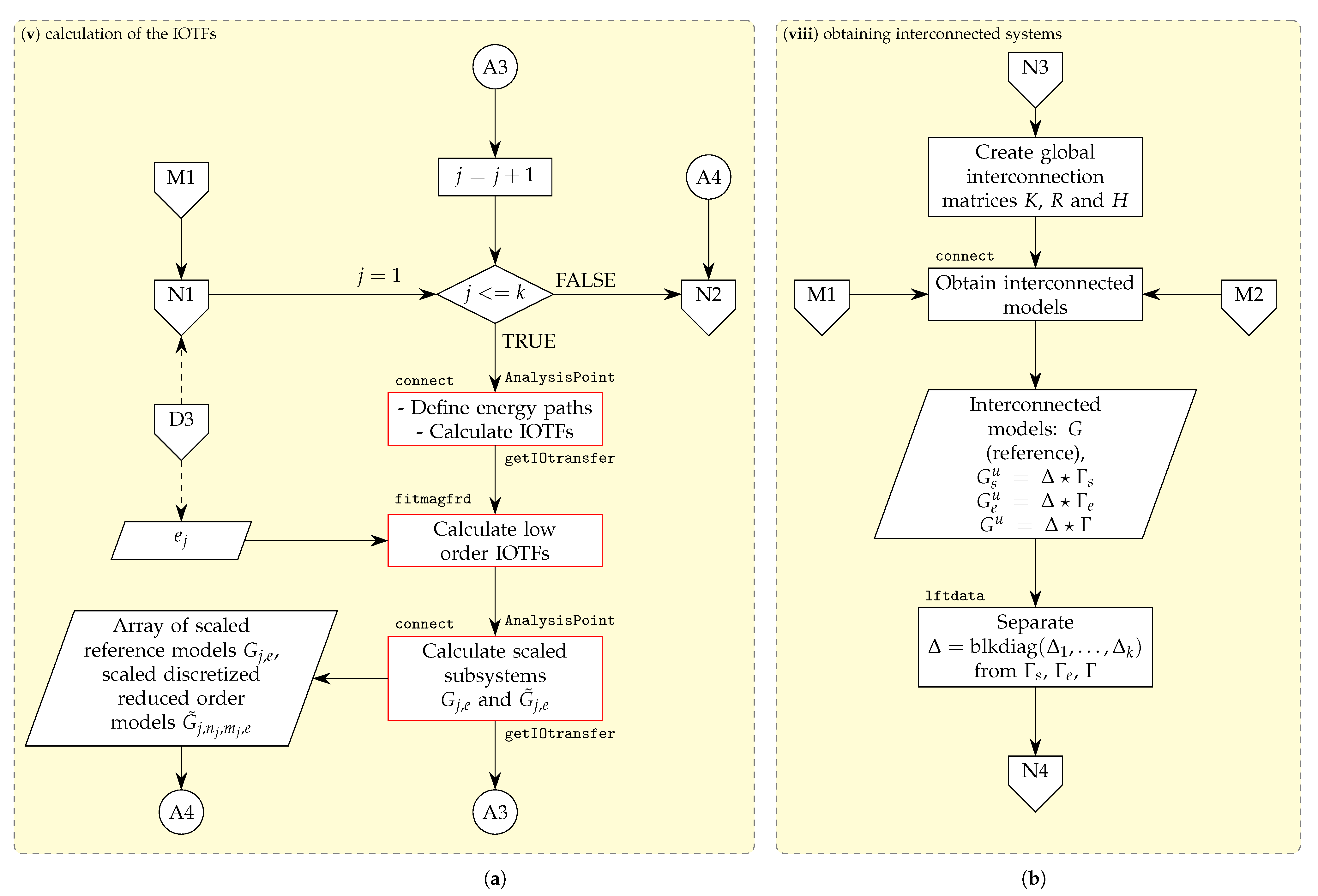
4.2. Defining the Unique Paths of Energy Transfer throughout the System
4.3. Replacing the Surroundings of a Subsystem with Input-Output Transfer Functions
On the Calculation of the IOTFs and its Practical Applicability
4.4. Refining the Additive Uncertainty Model
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| BTM | balanced truncation method |
| FEM | finite element method |
| IOTF(s) | input-output transfer function(s) |
| IQC(s) | integral quadratic constraint(s) |
| LMI(s) | linear matrix inequality(ies) |
| LFT | linear fractional transformation |
| LTI | linear time-invariant |
| MOR | model order reduction |
References
- Bathe, K.J. (Ed.) Finite Element Procedures, 2nd ed.; Prentice Hall, Pearson Education, Inc.: Watertown, MA, USA, 2014. [Google Scholar]
- Bathe, K.J. Finite Element Procedures in Engineering Analysis; Prentice-Hall Civil Engineering and Engineering Mechanics Series; Prentice-Hall: Englewood Cliffs, NJ, USA, 1982. [Google Scholar]
- Hughes, T.J.R. The Finite Element Method: Linear Static and Dynamic Finite Element Analysis; Dover Publications: New York, NY, USA, 2000. [Google Scholar]
- Srivastava, V.; Dwivedi, S.; Mukhopadhyay, A. Parametric Investigation of Vibration of Stiffened Structural Steel Plates Using Finite Element Analysis and Grey Relational Analysis. Rep. Mech. Eng. 2022, 3, 108–115. [Google Scholar] [CrossRef]
- Jokic, M.; Stegic, M.; Butkovic, M. Reduced-Order Multiple Tuned Mass Damper Optimization: A Bounded Real Lemma for Descriptor Systems Approach. J. Sound Vib. 2011, 330, 5259–5268. [Google Scholar] [CrossRef]
- Jones, B.L.; Kerrigan, E.C. When Is the Discretization of a Spatially Distributed System Good Enough for Control? Automatica 2010, 46, 1462–1468. [Google Scholar] [CrossRef] [Green Version]
- Vinnicombe, G. Uncertainty and Feedback: H [Infinity] Loop-Shaping and the [Nu]-Gap Metric; Imperial College Press: London, UK, 2001. [Google Scholar]
- Antoulas, A.C. Approximation of Large-Scale Dynamical Systems; Advances in Design and Control, Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2005. [Google Scholar]
- Reis, T.; Stykel, T. Passivity-Preserving Model Reduction of Differential-Algebraic Equations in Circuit Simulation. PAMM 2007, 7, 1021601–1021602. [Google Scholar] [CrossRef]
- Schwerdtner, P.; Voigt, M.; Voigt, M. Structure Preserving Model Order Reduction by Parameter Optimization. arXiv 2020, arXiv:2011.07567. [Google Scholar]
- Beddig, R.S.; Benner, P.; Dorschky, I.; Reis, T.; Schwerdtner, P.; Voigt, M.; Voigt, M.; Werner, S.W.R. Structure-Preserving Model Reduction for Dissipative Mechanical Systems. arXiv 2020, arXiv:2010.06331. [Google Scholar]
- Cheng, X.; Scherpen, J.M. Model Reduction Methods for Complex Network Systems. arXiv 2020, arXiv:2012.02268. [Google Scholar] [CrossRef]
- Wu, F.; Wang, Z.; Song, D.; Lian, H. Lightweight Design of Control Arm Combining Load Path Analysis and Biological Characteristics. Rep. Mech. Eng. 2022, 3, 71–82. [Google Scholar] [CrossRef]
- Reis, T.; Stykel, T. Stability Analysis and Model Order Reduction of Coupled Systems. Math. Comput. Model. Dyn. Syst. 2007, 13, 413–436. [Google Scholar] [CrossRef]
- Dogančić, B.; Jokić, M. Discretization and Model Reduction Error Estimation of Interconnected Dynamical Systems. Ifac Pap. 2022; in press. [Google Scholar]
- Stefanović-Marinović, J.; Vrcan, Ž.; Troha, S.; Milovančević, M. Optimization of Two-Speed Planetary Gearbox with Brakes on Single Shafts. Rep. Mech. Eng. 2022, 3, 94–107. [Google Scholar] [CrossRef]
- Scherer, C.W.; Weiland, S. Linear Matrix Inequalities in Control. 2015. Available online: https://www.imng.uni-stuttgart.de/mst/files/LectureNotes.pdf (accessed on 12 January 2022).
- Scherer, C.W.; Veenman, J. Stability Analysis by Dynamic Dissipation Inequalities: On Merging Frequency-Domain Techniques with Time-Domain Conditions. Syst. Control Lett. 2018, 121, 7–15. [Google Scholar] [CrossRef] [Green Version]
- Scherer, C. Dissipativity and Integral Quadratic Constraints, Tailored Computational Robustness Tests for Complex Interconnections. arXiv 2022, arXiv:2105.07401. [Google Scholar] [CrossRef]
- Willems, J.C. Dissipative Dynamical Systems Part I: General Theory. Arch. Ration. Mech. Anal. 1972, 45, 321–351. [Google Scholar] [CrossRef]
- Willems, J.C. Dissipative Dynamical Systems Part II: Linear Systems with Quadratic Supply Rates. Arch. Ration. Mech. Anal. 1972, 45, 352–393. [Google Scholar] [CrossRef]
- Balas, G.; Doyle, J.; Glover, K.; Packard, A.; Smith, R. μ-Analysis and Synthesis Toolbox; The MathWorks Inc.: Natick, MA, USA; MYSYNC Inc.: Natick, MA, USA, 1995. [Google Scholar]
- Balas, G.J.; Chiang, R.Y.; Packard, A.; Safonov, M.G. Robust Control Toolbox™ User’s Guide; The MathWorks Inc.: Natick, MA, USA, 2021. [Google Scholar]
- Megretski, A.; Rantzer, A. System Analysis via Integral Quadratic Constraints. IEEE Trans. Autom. Control. 1997, 42, 819–830. [Google Scholar] [CrossRef] [Green Version]
- Veenman, J.; Scherer, C.W.; Köroğlu, H. Robust Stability and Performance Analysis Based on Integral Quadratic Constraints. Eur. J. Control. 2016, 31, 1–32. [Google Scholar] [CrossRef]
- Veenman, J.; Scherer, C.W.; Ardura, C.; Bennani, S.; Preda, V.; Girouart, B. IQClab: A New IQC Based Toolbox for Robustness Analysis and Control Design. IFAC-Pap. 2021, 54, 69–74. [Google Scholar] [CrossRef]
- Gahinet, P.; Nemirovskii, A. General-Purpose LMI Solvers with Benchmarks. In Proceedings of the 32nd IEEE Conference on Decision and Control, San Antonio, TX, USA, 15–17 December 1993; Volume 4, pp. 3162–3165. [Google Scholar] [CrossRef]
- Gahinet, P.; Nemirovskii, A.; Laub, A.; Chilali, M. The LMI Control Toolbox. In Proceedings of the 33rd IEEE Conference on Decision and Control, Lake Buena Vista, FL, USA, 14–16 December 1994; Volume 3, pp. 2038–2041. [Google Scholar] [CrossRef]
- Löfberg, J. YALMIP: A Toolbox for Modeling and Optimization in MATLAB. In Proceedings of the CACSD Conference, Boston, MA, USA, 30 June–2 July 2004. [Google Scholar]
- Grant, M.; Boyd, S. Graph Implementations for Nonsmooth Convex Programs. In Recent Advances in Learning and Control; Blondel, V., Boyd, S., Kimura, H., Eds.; Lecture Notes in Control and Information Sciences, Springer-Verlag Limited: London, UK, 2008; pp. 95–110. [Google Scholar]
- Grant, M.; Boyd, S. CVX: Matlab Software for Disciplined Convex Programming, Version 2.1, 2014. Available online: http://cvxr.com/cvx (accessed on 13 March 2022).
- Sturm, J.F. Using SeDuMi 1.02, A MATLAB Toolbox for Optimization over Symmetric Cones. Optim. Methods Softw. 1999, 11, 625–653. [Google Scholar] [CrossRef]
- Toh, K.C.; Todd, M.J.; Tütüncü, R.H. SDPT3—A Matlab Software Package for Semidefinite Programming, Version 1.3. Optim. Methods Softw. 1999, 11, 545–581. [Google Scholar] [CrossRef]
- ApS, M. The MOSEK Optimization Toolbox for MATLAB Manual. Version 9.2; MOSEK ApS: Copenhagen, Denmark, 2020. [Google Scholar]
- Reis, T.; Stykel, T. Balanced Truncation Model Reduction of Second-Order Systems. Math. Comput. Model. Dyn. Syst. 2008, 14, 391–406. [Google Scholar] [CrossRef]
- Reis, T.; Stykel, T. PABTEC: Passivity-preserving Balanced Truncation for Electrical Circuits. IEEE Trans. Comput. Aided Des. Integr. Circuits Syst. 2010, 29, 1354–1367. [Google Scholar] [CrossRef]
- Boyd, S.; Ghaoui, L.E.; Feron, E.; Balakrishnan, V. Linear Matrix Inequalities in System and Control Theory; Studies in Applied Mathematics; SIAM: Philadelphia, PA, USA, 1994; Volume 15. [Google Scholar]
- Boyd, S.; Vandenberghe, L. Convex Optimization; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Salehi, Z.; Karimaghaee, P.; Khooban, M.H. A New Passivity Preserving Model Order Reduction Method: Conic Positive Real Balanced Truncation Method. IEEE Trans. Syst. Man Cybern. 2021, 52, 2945–2953. [Google Scholar] [CrossRef]
- Salehi, Z.; Karimaghaee, P.; Khooban, M.H. Model Order Reduction of Positive Real Systems Based on Mixed Gramian Balanced Truncation with Error Bounds. Circuits Syst. Signal Process. 2021, 40, 5309–5327. [Google Scholar] [CrossRef]
- Wang, X.; Fan, S.; Dai, M.Z.; Zhang, C. On Model Order Reduction of Interconnect Circuit Network: A Fast and Accurate Method. Mathematics 2021, 9, 1248. [Google Scholar] [CrossRef]
- Reis, T.; Stykel, T. Positive Real and Bounded Real Balancing for Model Reduction of Descriptor Systems. Int. J. Control. 2010, 83, 74–88. [Google Scholar] [CrossRef]
- Skogestad, S.; Postlethwaite, I. Multivariable Feedback Control: Analysis and Design, 2nd ed.; Wiley: Chichester, UK, 2010. [Google Scholar]
- D’Andrea, R. Convex and Finite-Dimensional Conditions for Controller Synthesis with Dynamic Integral Constraints. IEEE Trans. Autom. Control. 2001, 46, 222–234. [Google Scholar] [CrossRef]
- Dogancic, B.; Jokic, M.; Alujevic, N.; Wolf, H. Unstructured Uncertainty Modeling for Coupled Vibration Systems. In Proceedings of (ISMA2018)/(USD2018); Desmet, W., Pluymers, B., Moens, D., Rottiers, W., Eds.; Katholieke Universiteit Leuven: Leuven, Belgium, 2018; pp. 5125–5132. [Google Scholar]
- Dogančić, B. Bruno-Dogancic/Spumbox. GitHub: San Francisco, CA, USA, 2022. Available online: https://github.com/bruno-dogancic/spumbox (accessed on 12 January 2022).
- Dogančić, B. Bruno-Dogancic/Spumbox: Spumbox_v0.1; Zenodo (CERN): Geneva, Switzerland, 2022. [Google Scholar] [CrossRef]
- Oppenheim, A.V.; Schafer, R.W. Digital Signal Processing; Prentice-Hall: Englewood Cliffs, NJ, USA, 1975. [Google Scholar]
- Vinnicombe, G. On IQCs and the /Spl Nu/-Gap Metric. In Proceedings of the 37th IEEE Conference on Decision and Control (Cat. No.98CH36171), Tampa, FL, USA, 18–18 December 1998; Volume 2, pp. 1199–1200. [Google Scholar] [CrossRef]
- Mosavi, A.; Qasem, N.; Shokri, M.; Band, S.S.; Mohammadzadeh, A. Fractional-Order Fuzzy Control Approach for Photovoltaic/Battery Systems under Unknown Dynamics, Variable Irradiation and Temperature. Electronics 2020, 9, 1455. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | l | d | E | ||||||
|---|---|---|---|---|---|---|---|---|---|
| # | - | ||||||||
| 1 | 2 | 7800 | 210 × | 0 | 0 | ||||
| 2 | 2 | 7800 | 0 | 0 | |||||
| 3 | 1 | 7800 |
| Case # 1 | Case # 2 | Case # 3 | |
|---|---|---|---|
| discretization number per beam 2 | 1 | ||
| orders of reduced order models per beam | |||
| orders of initial weights per beam | |||
| orders of refined weights per beam | |||
| number of: inputs × outputs, states of [reference] and (reduced order) system, and decision variables to the IQC COP 3 | RO: RW: SW: | RO: RW: SW: | RO: (120), n/a RW: (120), n/a SW: |
| induced -gains of the [nominal system] 4, the best achievable (worst case gain using -tools) for | RO: RW: SW: | RO: RW: SW: ) | RO: n/a RW: n/a SW: |
| obtained [robust stability margins using -tools] 5 and (-gaps) 6 for | RO: RW: SW: | RO: RW: SW: | RO: 0.0263 RW: 0.0263 SW: 0.0265 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dogančić, B.; Jokić, M.; Alujević, N.; Wolf, H. Structure Preserving Uncertainty Modelling and Robustness Analysis for Spatially Distributed Dissipative Dynamical Systems. Mathematics 2022, 10, 2125. https://doi.org/10.3390/math10122125
Dogančić B, Jokić M, Alujević N, Wolf H. Structure Preserving Uncertainty Modelling and Robustness Analysis for Spatially Distributed Dissipative Dynamical Systems. Mathematics. 2022; 10(12):2125. https://doi.org/10.3390/math10122125
Chicago/Turabian StyleDogančić, Bruno, Marko Jokić, Neven Alujević, and Hinko Wolf. 2022. "Structure Preserving Uncertainty Modelling and Robustness Analysis for Spatially Distributed Dissipative Dynamical Systems" Mathematics 10, no. 12: 2125. https://doi.org/10.3390/math10122125