
Quantized Fault-Tolerant Control for Descriptor Systems with Intermittent Actuator Faults, Randomly Occurring Sensor Non-Linearity, and Missing Data





Abstract
:1. Introduction, Notations, and Outline
1.1. Bibliographical Review
1.2. Objective and Outline
2. Preliminaries and Problem Statements
2.1. The Model
2.2. Assumption
- A1
- is a singular matrix such that .
- A2
- Matrix is defined as , where matrices H and F are known and constant with appropriate dimensions, and matrix is an unknown matrix verifying .
- A3
- Due to actuator perturbation, we assume that there may exist an intermittent fault in the actuator, which is described aswhere matrix defines the actuator fault. For the sake of notation, in each , the related matrices or vectors to are denoted using the index i.Matrix is defined as , where the degradation levels of the actuator, , are defined in with a probability matrix , . defines the transition probability such that , and for each i. A Markov chain that exhibits time-dependent transition probabilities is known as a non-homogeneous Markov chain. Transition matrix is assumed to have the following structure:where and .Accordingly, the time-varying transition probability matrix evolves on a polytope defined by its vertices , as well as referring to the polytopic time-varying transition matrix.
- A4
- Sensor outputs are sent over an unreliable network, where random non-linearities may affect the sensors. Here, we assume that the sensor output is as follows:where is a non-linear function, which can be defined aswhere is a nonlinear continuous function satisfying the sector condition [32,33]where diagonal matrices and are known and verify and .
- A5
- Additionally, this study attempts to develop a controller using the quantization of sensor output. Based on the logarithmic quantizer, the following model can be used to define sensor output:where is the ’s’th component of .To define the logarithmic quantizer, we propose the following set of quantization levels:where is the quantization density verifying .Specifically, the corresponding logarithmic quantizer is defined as follows:in which defines the input of the quantizer, and .The quantization error of a logarithmic quantizer is , where . Then, we havewhere
- A6
- The measured output suffers from both signal losses and quantization arriving to the controller, thus, the output is given by
3. Admissibility and Dissipativity Analysis
4. Dissipativity Controller Design
5. A Numerical Application
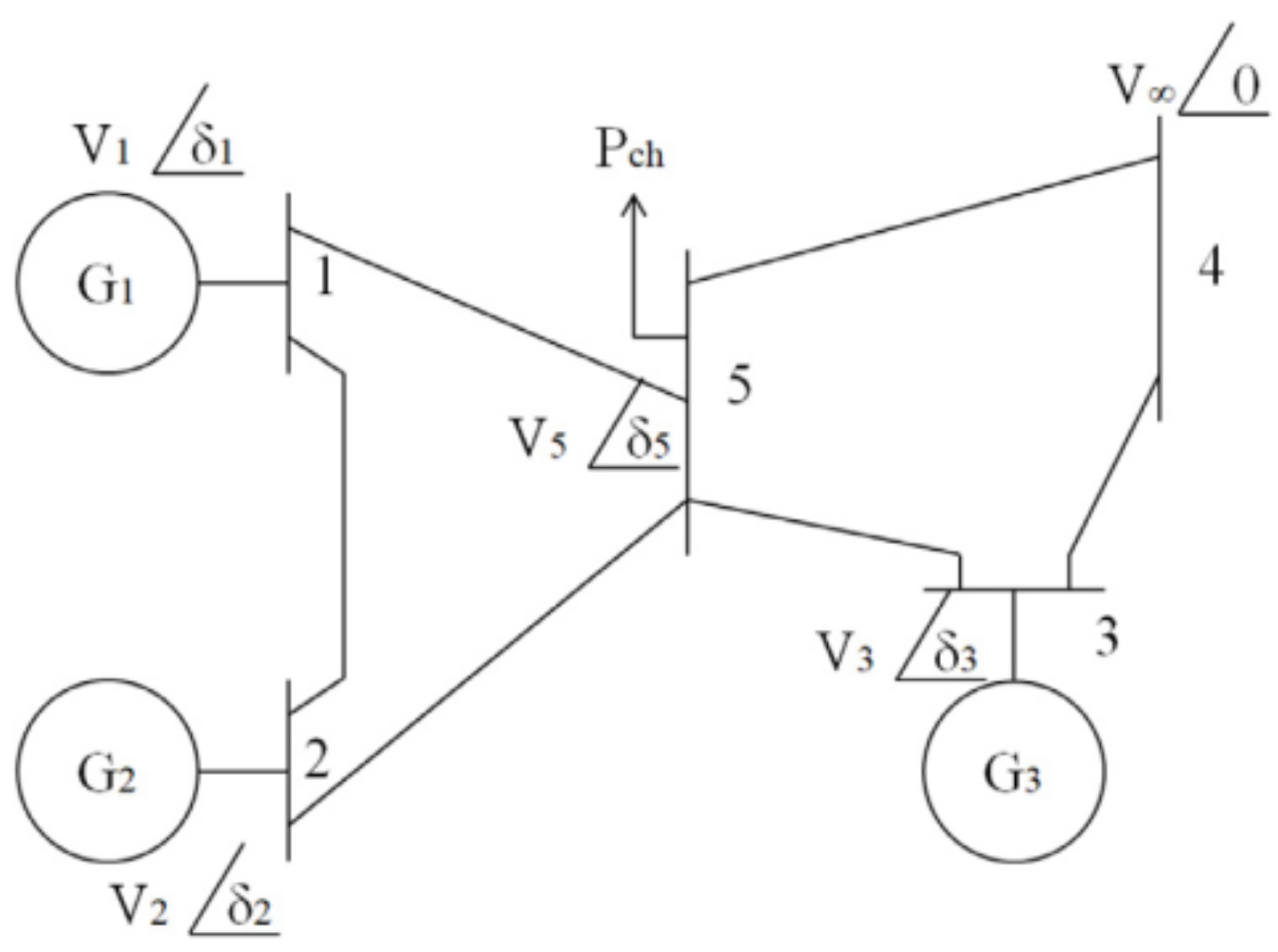
5.1. A Machine Infinite-Bus System
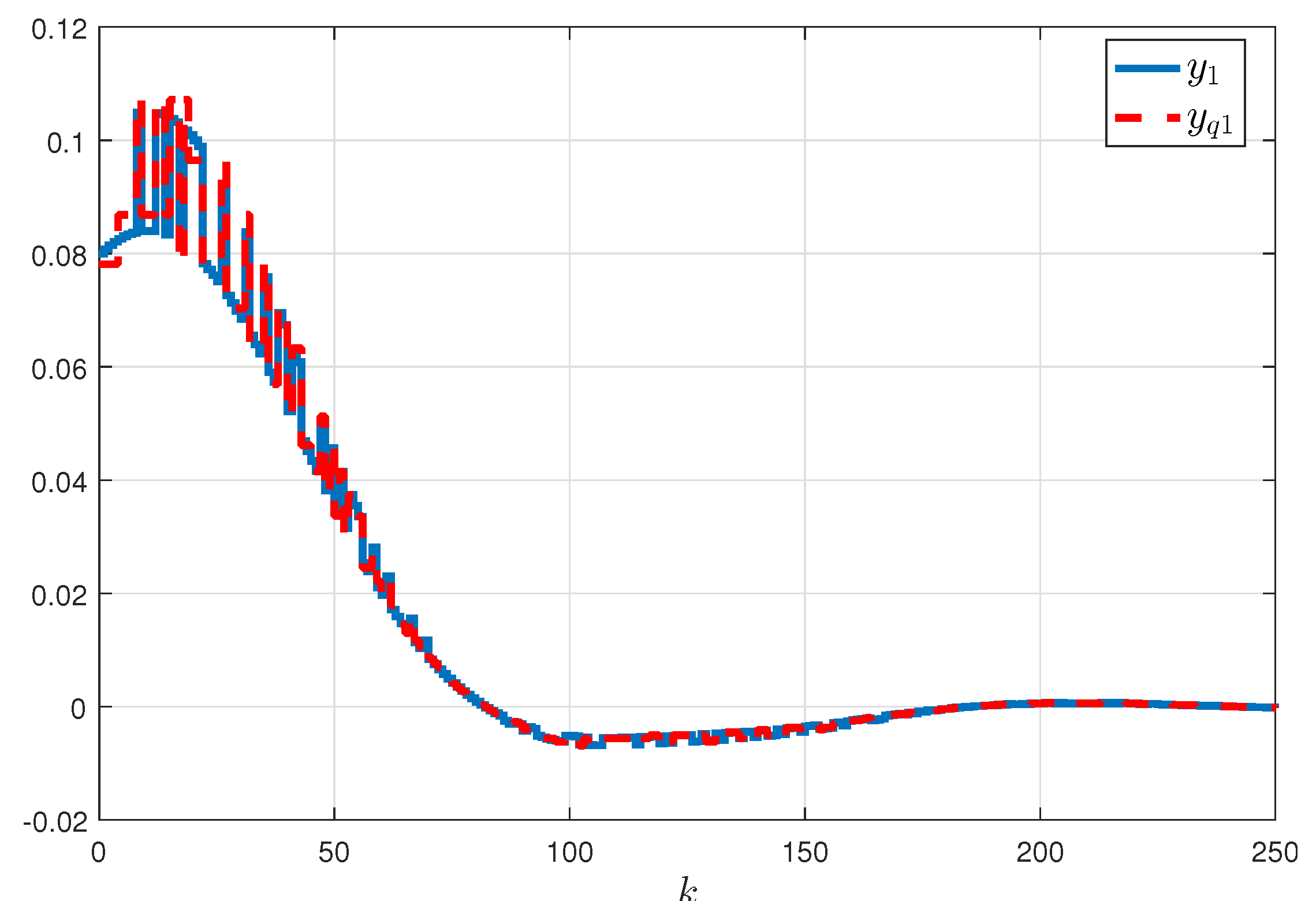
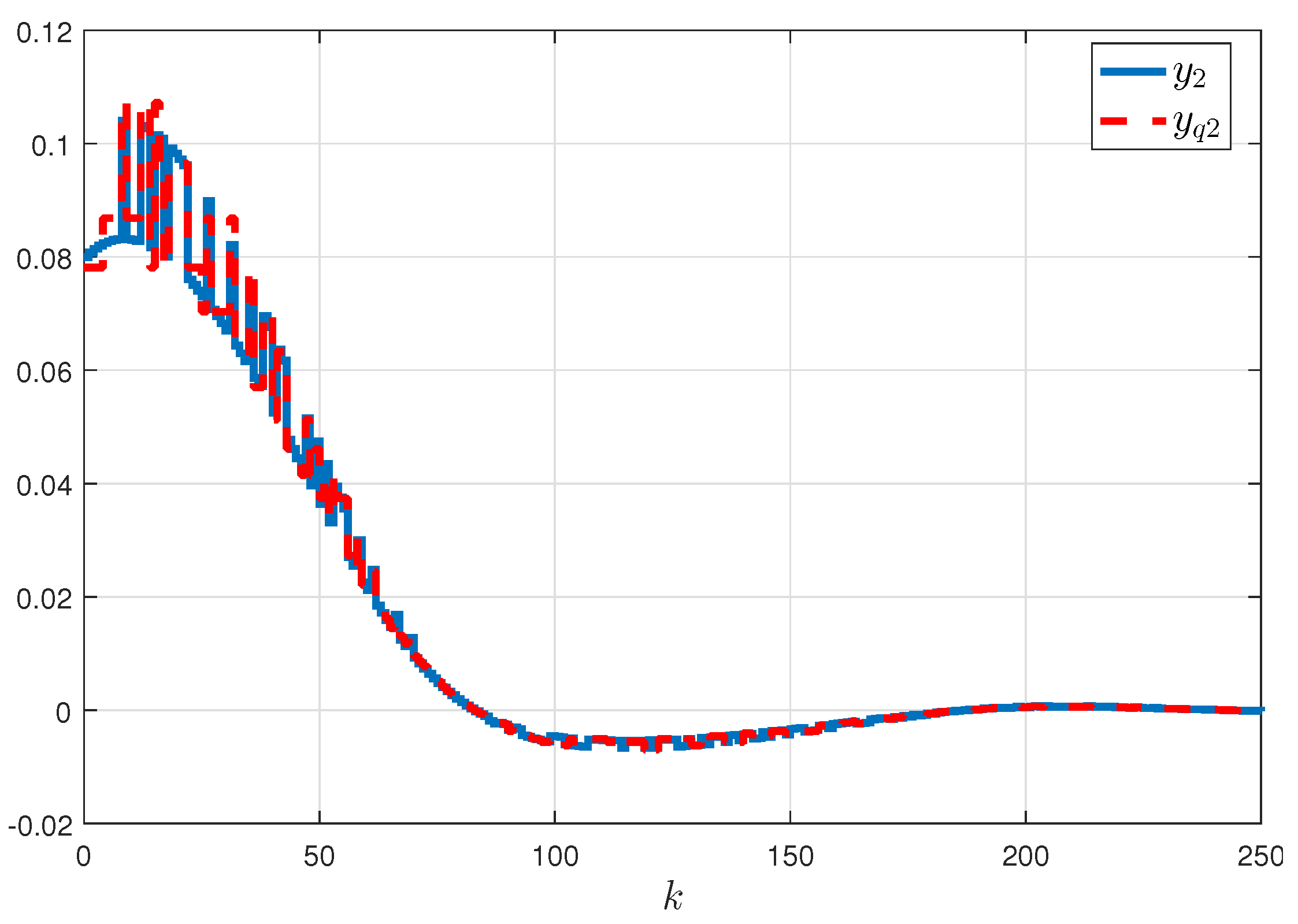
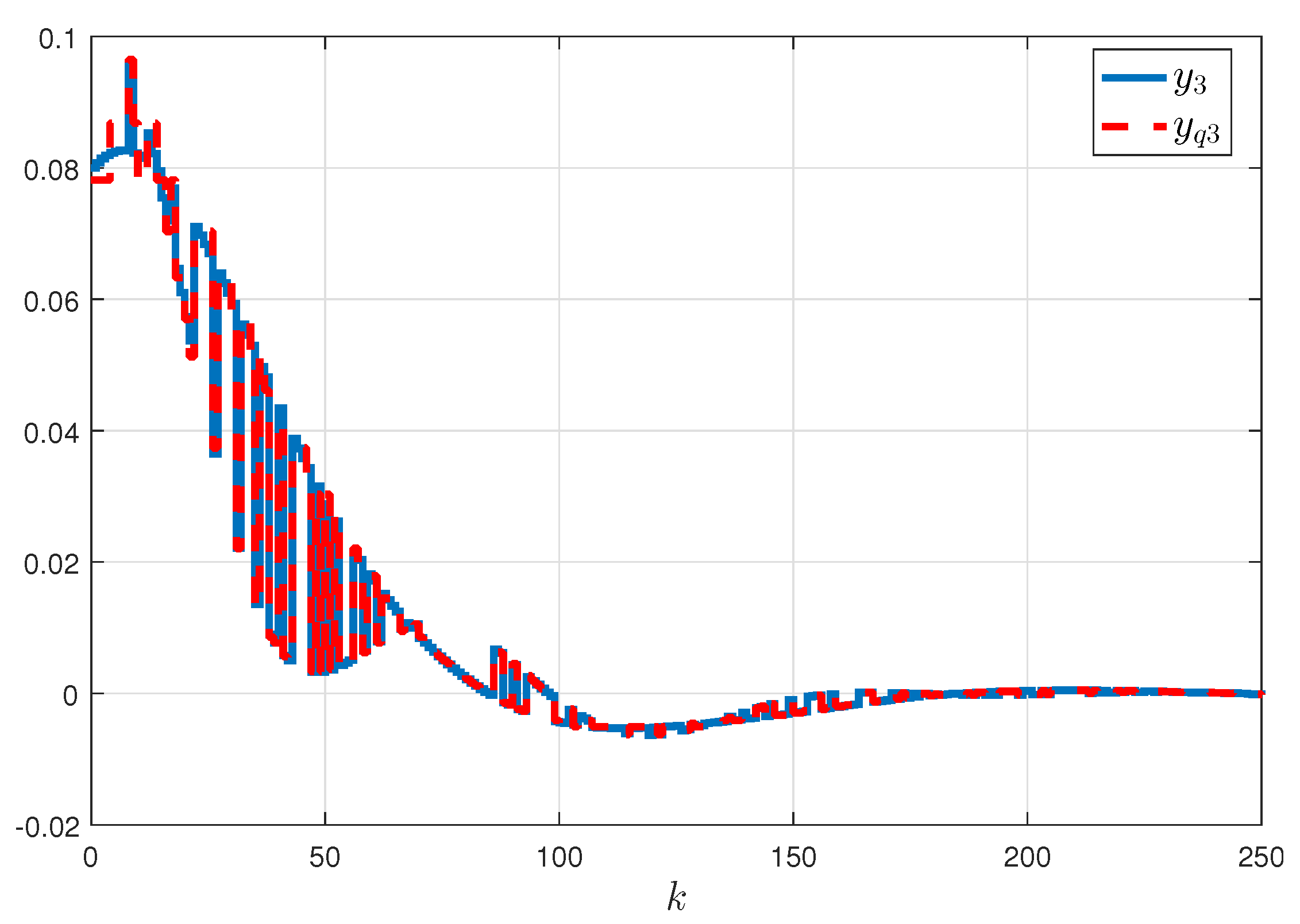
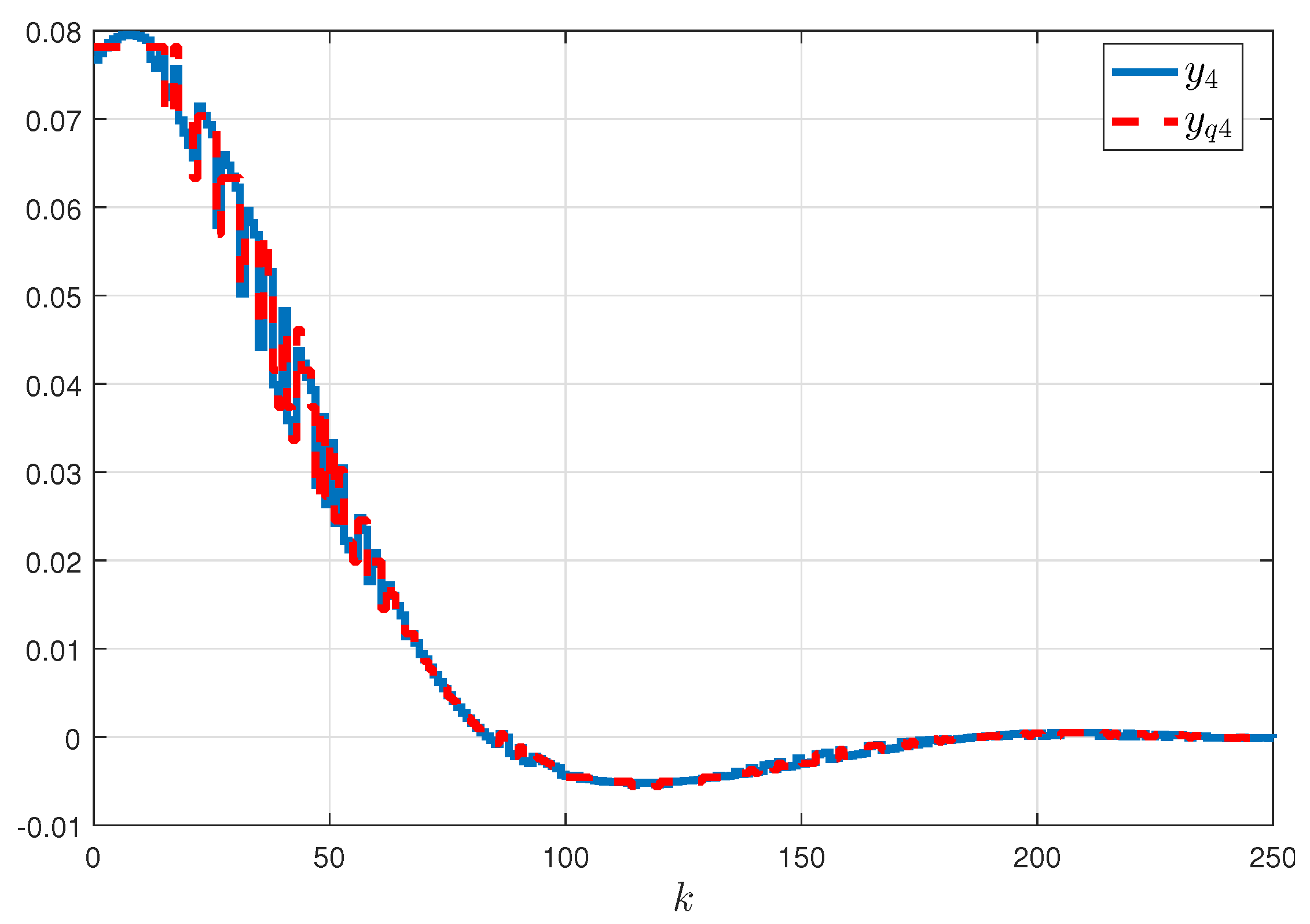
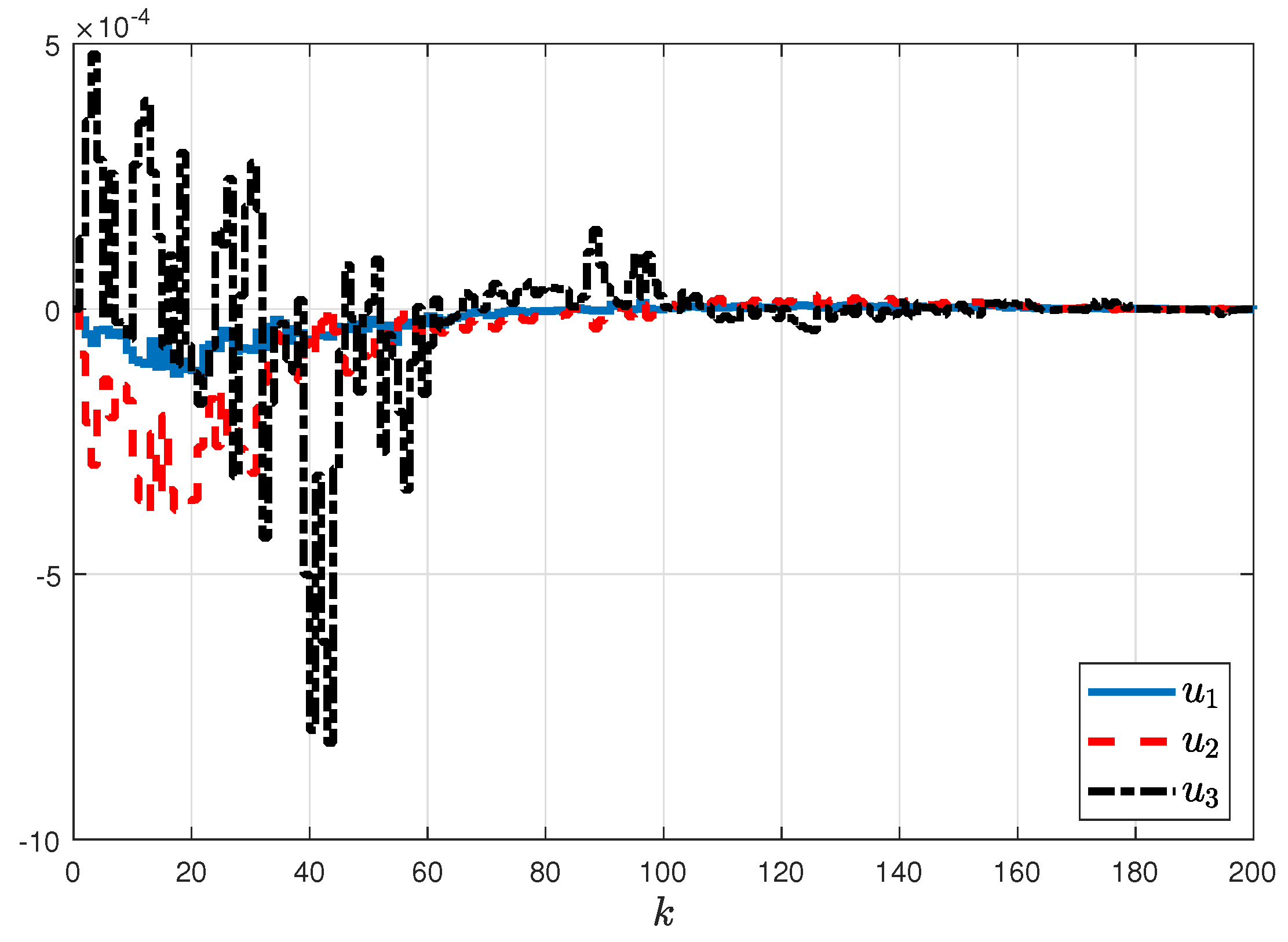
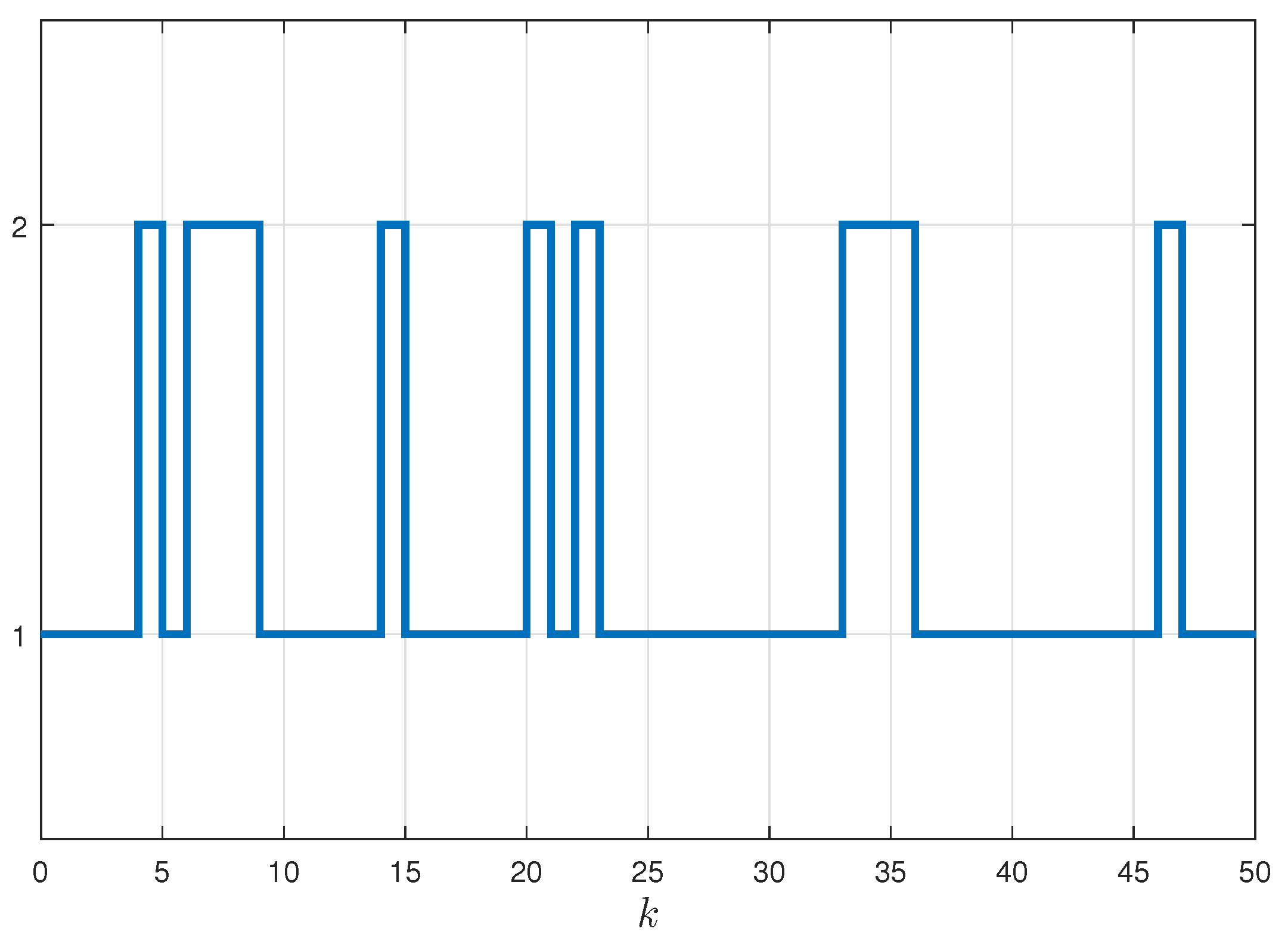
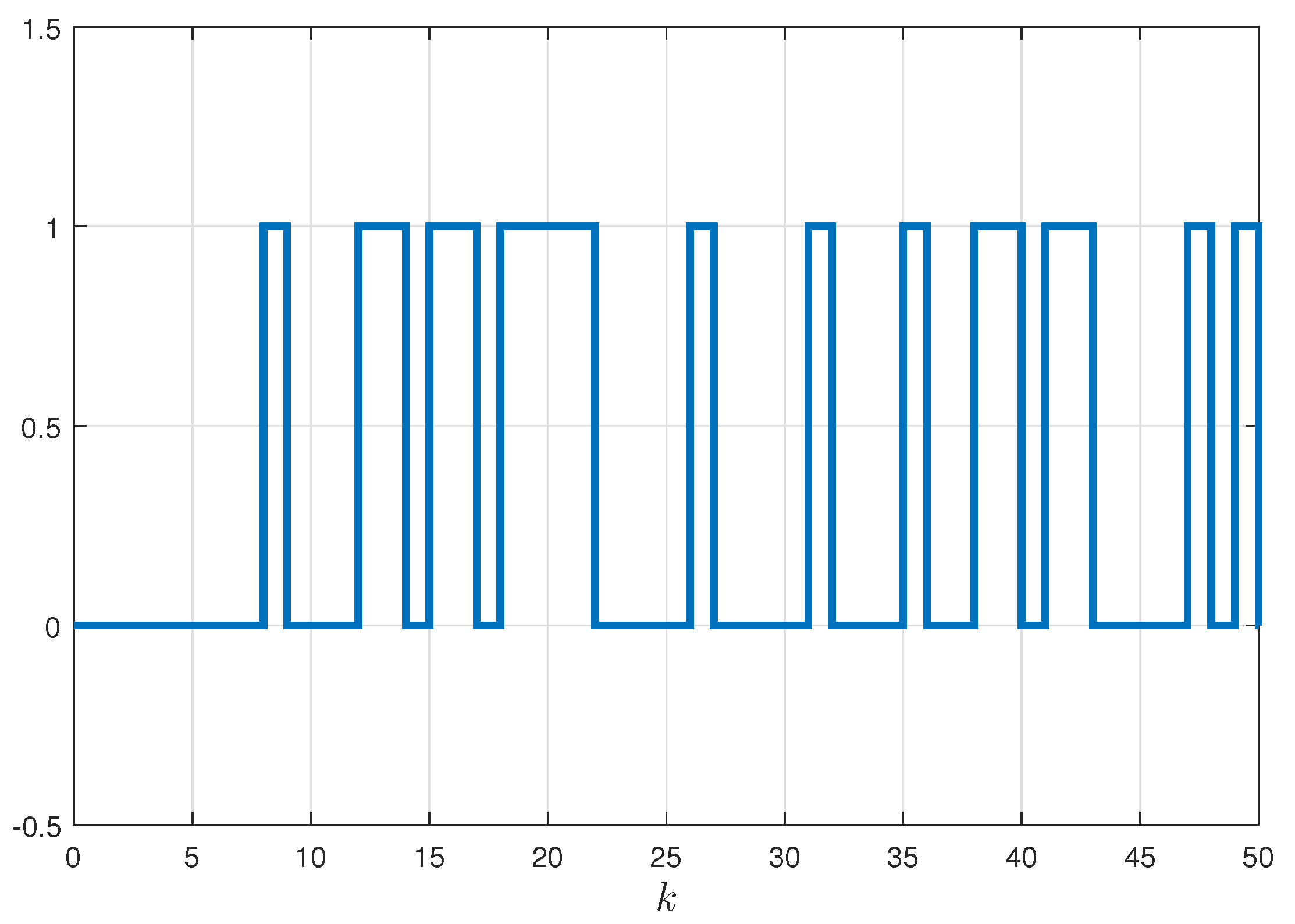
5.2. Results and Graphical Plots
5.3. Comparative Explanations
- Ref. [35] describes a discrete-time Markovian jump system with a quantized and resilient state feedback control law. As we considered a more general class of singular systems with partially measured states, our approach was more general. Additionally, random sensor non-linearity and missing data were taken into account.
- Although the reliable control problem for discrete-time descriptor systems, using a dynamic output feedback controller, had been explored in our previous work [41], the present investigation differed with the following points:
- The intermittent actuator failures were described by a non-homogeneous Markov process with time-varying transition probabilities. Moreover, the randomly occurring sensor non-linearity, suggested in this study, was more general and might include the saturation non-linearity.
- To handle a networked control system, the output quantization and missing data might be an effective scheme to reduce the storage space and transmission bandwidth [44].
- Between resilient controllers proposed in [35,44] and the reliable controller developed in this study, resilient controllers were employed to precisely handle gain fluctuations, whereas the reliable controller was used to compensate for failures of components in the system, especially actuators and sensors.
6. Conclusions and Future Work
6.1. Concluding Remarks
6.2. Limitations
6.3. Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Dai, L. Singular Control Systems; Lecture Notes in Control and Information Sciences; Springer: New York, NY, USA, 1989; Volume 118. [Google Scholar]
- Kchaou, M. Robust H∞ Observer-Based Control for a Class of (TS) Fuzzy Descriptor Systems with Time-Varying Delay. Int. J. Fuzzy Syst. 2017, 19, 909–924. [Google Scholar] [CrossRef]
- Zhang, Y.; Shi, P.; Agarwal, R.K.; Shi, Y. Event-Based Dissipative Analysis for Discrete Time-Delay Singular Jump Neural Networks. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 1232–1241. [Google Scholar] [CrossRef]
- Zhang, D.; Zhou, Z.; Jia, X. Networked fuzzy output feedback control for discrete-time Takagi-Sugeno fuzzy systems with sensor saturation and measurement noise. Inf. Sci. 2018, 457–458, 182–194. [Google Scholar] [CrossRef]
- Wang, G.; Zhang, Q.; Yang, C. Stabilization of discrete-time singular Markovian jump repeated vector nonlinear systems. Int. J. Robust Nonlinear Control 2016, 26, 1777–1793. [Google Scholar] [CrossRef]
- Zhang, Y.; Shi, P.; Agarwal, R.K.; Shi, Y. Event-based mixed H∞ and passive filtering for discrete singular stochastic systems. Int. J. Control 2020, 93, 2407–2415. [Google Scholar] [CrossRef]
- Zhang, Y.; Shi, P.; Basin, M.V. Event-based finite-time H∞ filtering of discrete-time singular jump network systems. Int. J. Robust Nonlinear Control 2022, 32, 4038–4054. [Google Scholar] [CrossRef]
- Kaviarasan, B.; Sakthivel, R.; Kwon, O.M. Robust fault-tolerant control for power systems against mixed actuator failures. Nonlinear Anal. Hybrid Syst. 2016, 22, 249–261. [Google Scholar] [CrossRef]
- Kamal, E.; Aitouche, A.; Oueidat, M. Fuzzy Fault-Tolerant Control of Wind-Diesel Hybrid Systems Subject to Sensor Faults. IEEE Trans. Sustain. Energy 2013, 4, 857–866. [Google Scholar] [CrossRef]
- Wang, S.; Jiang, Y.; Li, Y.; Liu, D. Reliable observer-based H∞ control for discrete-time fuzzy systems with time-varying delays and stochastic actuator faults via scaled small gain theorem. Neurocomputing 2015, 147, 251–259. [Google Scholar] [CrossRef]
- Liu, Y.; Ma, Y.; Wang, Y. Reliable sliding mode finite-time control for discrete-time singular Markovian jump systems with sensor fault and randomly occurring nonlinearities. Int. J. Robust Nonlinear Control 2018, 28, 381–402. [Google Scholar] [CrossRef]
- Wang, Y.; Shi, P.; Yan, H. Reliable control of fuzzy singularly perturbed systems and its application to electronic circuits. IEEE Trans. Circuits Syst. I 2018, 65, 3519–3528. [Google Scholar] [CrossRef]
- Zhao, D.; Karimi, H.R.; Sakthivel, R.; Li, Y. Non-fragile fault-tolerant control for nonlinear Markovian jump systems with intermittent actuator fault. Nonlinear Anal. Hybrid Syst. 2019, 32, 337–350. [Google Scholar] [CrossRef]
- Cao, L.; Tao, Y.; Wang, Y.; Li, J.; Huang, B. Reliable H∞ control for nonlinear discrete-time systems with multiple intermittent faults in sensors or actuators. Int. J. Syst. Sci. 2017, 48, 302–315. [Google Scholar] [CrossRef]
- Tao, Y.; Shen, D.; Wang, Y.; Ye, Y. Reliable H∞ control for uncertain nonlinear discrete-time systems subject to multiple intermittent faultsin sensors and/or actuators. J. Frankl. Inst. 2015, 352, 4721–4740. [Google Scholar] [CrossRef]
- Li, F.; Xu, S.; Zhang, B. Resilient Asynchronous H∞ Control for Discrete-Time Markov Jump Singularly Perturbed Systems Based on Hidden Markov Model. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 2860–2869. [Google Scholar] [CrossRef]
- Du, C.; Yang, C.; Li, F.; Gui, W. A Novel Asynchronous Control for Artificial Delayed Markovian Jump Systems via Output Feedback Sliding Mode Approach. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 364–374. [Google Scholar] [CrossRef]
- Shen, H.; Hu, X.; Wang, J.; Cao, J.; Qian, W. Non-Fragile H∞ Synchronization for Markov Jump Singularly Perturbed Coupled Neural Networks Subject to Double-Layer Switching Regulation. IEEE Trans. Neural Netw. Learn. Syst. 2021, 1–11. [Google Scholar] [CrossRef]
- Cheng, J.; Huang, W.; Lam, H.K.; Cao, J.; Zhang, Y. Fuzzy-Model-Based Control for Singularly Perturbed Systems with Nonhomogeneous Markov Switching: A Dropout Compensation Strategy. IEEE Trans. Fuzzy Syst. 2020, 30, 530–541. [Google Scholar] [CrossRef]
- Wang, Z.; Rodrigues, M.; Theilliol, D.; Shen, Y. Observer-based control for singular nonhomogeneous Markov jump systems with packet losses. J. Frankl. Inst. 2018, 355, 6617–6637. [Google Scholar] [CrossRef]
- Sathishkumar, M.; Sakthivel, R.; Kwon, O.M.; Kaviarasan, B. Finite-time mixed H∞ and passive filtering for Takagi–Sugeno fuzzy nonhomogeneous Markovian jump systems. Int. J. Syst. Sci. 2017, 48, 1416–1427. [Google Scholar] [CrossRef]
- Kwon, N.K.; Park, I.S.; Park, P.; Park, C. Dynamic Output-Feedback Control for Singular Markovian Jump System: LMI Approach. IEEE Trans. Autom. Control 2017, 62, 5396–5400. [Google Scholar] [CrossRef]
- Long, S.; Zhong, S. H∞ control for a class of discrete-time singular systems via dynamic feedback controller. Appl. Math. Lett. 2016, 58, 110–118. [Google Scholar] [CrossRef]
- Zhang, Y.; Shi, P.; Nguang, S.K. Observer-based finite-time H∞ control for discrete singular stochastic systems. Appl. Math. Lett. 2014, 38, 115–121. [Google Scholar] [CrossRef]
- Chu, X.; Li, M. H∞ non-fragile observer-based dynamic event-triggered sliding mode control for nonlinear networked systems with sensor saturation and dead-zone input. ISA Trans. 2019, 94, 93–107. [Google Scholar] [CrossRef]
- Zuo, Z.; Wang, J.; Huang, L. Output feedback H∞ controller design for linear discrete-time systems with sensor nonlinearities. IEE Proc.-Control Theory Appl 2005, 152, 19–26. [Google Scholar] [CrossRef]
- Cheng, J.; Park, J.H.; Cao, J.; Qi, W. A hidden mode observation approach to finite-time SOFC of Markovian switching systems with quantization. Nonlinear Dyn. 2020, 100, 509–521. [Google Scholar] [CrossRef]
- Shen, Y.; Wu, Z.G.; Shi, P.; Shu, Z.; Karimi, H.R. H∞ control of Markov jump time-delay systems under asynchronous controller and quantizer. Automatica 2019, 99, 352–360. [Google Scholar] [CrossRef] [Green Version]
- Cheng, J.; Park, J.H.; Zhao, X.; Karimi, H.R.; Cao, J. Quantized Nonstationary Filtering of Networked Markov Switching RSNSs: A Multiple Hierarchical Structure Strategy. IEEE Trans. Autom. Control 2020, 65, 4816–4823. [Google Scholar] [CrossRef]
- Wang, Z.; Shen, B.; Shu, H.; Wei, G. Quantized H∞ Control for Nonlinear Stochastic Time-Delay Systems With Missing Measurements. IEEE Trans. Autom. Control 2012, 57, 1431–1444. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Mu, X. Event-triggered output quantized control of discrete Markovian singular systems. Automatica 2022, 135, 109992. [Google Scholar] [CrossRef]
- Khalil, H.K. Nonlinear Systems; Prentice-Hall: Hoboken, NJ, USA, 2002. [Google Scholar]
- Hu, J.; Wang, Z.; Gao, H.; Stergioulas, L.K. Probability-guaranteed H∞ finite-horizon filtering for a class of nonlinear time-varying systems with sensor saturations. Syst. Control Lett. 2012, 64, 477–484. [Google Scholar] [CrossRef] [Green Version]
- Rathinasamy, S.; Murugesan, S.; Alzahrani, F.; Ren, Y. Quantized Finite-Time Non-fragile Filtering for Singular Markovian Jump Systems with Intermittent Measurements. Circuits Syst. Signal Process. 2019, 38, 3971–3995. [Google Scholar] [CrossRef]
- Sathishkumar, M.; Sakthivel, R.; Alzahrani, F.S.; Kaviarasan, B.; Ren, Y. Mixed H∞ and passivity-based resilient controller for nonhomogeneous Markov jump systems. Nonlinear Anal. Hybrid Syst. 2019, 31, 86–99. [Google Scholar] [CrossRef]
- El-Sheikhi, F.A.; Soliman, H.M.; Ahshan, R.; Hossain, E. Regional Pole Placers of Power Systems under Random Failures/Repair Markov Jumps. Energies 2021, 14, 1989. [Google Scholar] [CrossRef]
- Xu, S.; Lam, J. Robust Control and Filtering of Singular Systems; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Wu, Z.; Park, J.; Su, H.; Chu, J. Admissibility and dissipativity analysis for discrete-time singular systems with mixed time-varying delays. Appl. Math. Comput. 2012, 218, 7128–7138. [Google Scholar] [CrossRef]
- Peterson, I. A stabilization algorithm for a class uncertain linear systems. Syst. Control Lett. 1987, 8, 351–357. [Google Scholar] [CrossRef]
- Wang, W.; Ma, S.; Zhang, C. Stability and Static Output Feedback Stabilization for a Class of Nonlinear Discrete-Time Singular Switched Systems. Int. J. Control. Autom. Syst. 2013, 11, 1138–1148. [Google Scholar] [CrossRef]
- Kchaou, M.; Jerbi, H.; Ali, N.B.; Alsaif, H. H∞ Reliable Dynamic Output-Feedback Controller Design for Discrete-Time Singular Systems with Sensor Saturation. Actuators 2021, 10, 196. [Google Scholar] [CrossRef]
- Koenig, D. Unknown input proportional multiple-integral observer design for linear descriptor systems: Application to state and fault estimation. IEEE Trans. Autom. Control 2005, 50, 212–217. [Google Scholar] [CrossRef] [Green Version]
- Guo, S.; Jiang, B.; Zhu, F.; Wang, Z. Luenberger-like interval observer design for discrete-time descriptor linear system. Syst. Control Lett. 2019, 126, 21–27. [Google Scholar] [CrossRef]
- Sathishkumar, M.; Sakthivel, R.; Wang, C.; Kaviarasan, B.; Marshal Anthoni, S. Non-fragile filtering for singular Markovian jump systems with missing measurements. Signal Process. 2018, 142, 125–136. [Google Scholar] [CrossRef]
- Hamidi, F.; Aloui, M.; Jerbi, H.; Kchaou, M.; Abbassi, R.; Popescu, D.; Ben Aoun, S.; Dimon, C. Chaotic Particle Swarm Optimisation for Enlarging the Domain of Attraction of Polynomial Nonlinear Systems. Electronics 2020, 9, 10. [Google Scholar] [CrossRef]
- Hamidi, F.; Jerbi, H.; Olteanu, S.C.; Popescu, D. An Enhanced Stabilizing Strategy for Switched Nonlinear Systems. Stud. Inform. Control 2019, 28, 391–400. [Google Scholar] [CrossRef]
- Popescu, D.; Dimon, C.; Borne, P.; Olteanu, S.C.; Mone, M.A. Advanced Control for Hydrogen Pyrolysis Installations. Energies 2020, 13, 3270. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Acronym/Notation |
|---|---|
| ℕ | the set of positive integer numbers |
| ℝ | the set of real numbers |
| n-dimensional Euclidean space | |
| real matrix | |
| real symmetric positive definite matrix | |
| norm of the matrix | |
| transpose of the matrix | |
| eigenvalue of a matrix | |
| mathematical expectation | |
| * | term that is induced by symmetry |
| discrete-time Markov process | |
| LMI | linear matrix inequalities |
| MJS | Markovian jump system |
| FTC | fault-tolerant control |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kchaou, M.; Jerbi, H.; Stefanoiu, D.; Popescu, D. Quantized Fault-Tolerant Control for Descriptor Systems with Intermittent Actuator Faults, Randomly Occurring Sensor Non-Linearity, and Missing Data. Mathematics 2022, 10, 1872. https://doi.org/10.3390/math10111872
Kchaou M, Jerbi H, Stefanoiu D, Popescu D. Quantized Fault-Tolerant Control for Descriptor Systems with Intermittent Actuator Faults, Randomly Occurring Sensor Non-Linearity, and Missing Data. Mathematics. 2022; 10(11):1872. https://doi.org/10.3390/math10111872
Chicago/Turabian StyleKchaou, Mourad, Houssem Jerbi, Dan Stefanoiu, and Dumitru Popescu. 2022. "Quantized Fault-Tolerant Control for Descriptor Systems with Intermittent Actuator Faults, Randomly Occurring Sensor Non-Linearity, and Missing Data" Mathematics 10, no. 11: 1872. https://doi.org/10.3390/math10111872