
Mathematical Modeling and Associated Numerical Simulation of Fusion/Solidification Front Evolution in the Context of Severe Accident of Nuclear Power Engineering

 , , and
, , and
Abstract
:1. Context and Introduction
- an enthalpy-based numerical method [6] that is the most common approach reported in the literature for simulating the solidification at the interface of an homogeneous liquid corium pool (see, for instance, [7]). The work reported in this paper aims at providing an alternative and a priori more accurate approach with an explicit tracking of such a liquid/solid interface;
- the diffuse interface approach followed in [8] where liquid phase stratification involving droplet detachment and coalescence processes in a two-phase corium pool is simulated. This work and the current one are complementary as they pursue the same goal: providing models and numerical methods for simulating the thermalhydraulic behaviour of a corium pool composed of different chemically reactive liquid phases with, possibly, liquid/solid phase change at their boundaries.
2. Modeling, Governing Equations
2.1. General Context of Modeling
2.2. Governing Equations
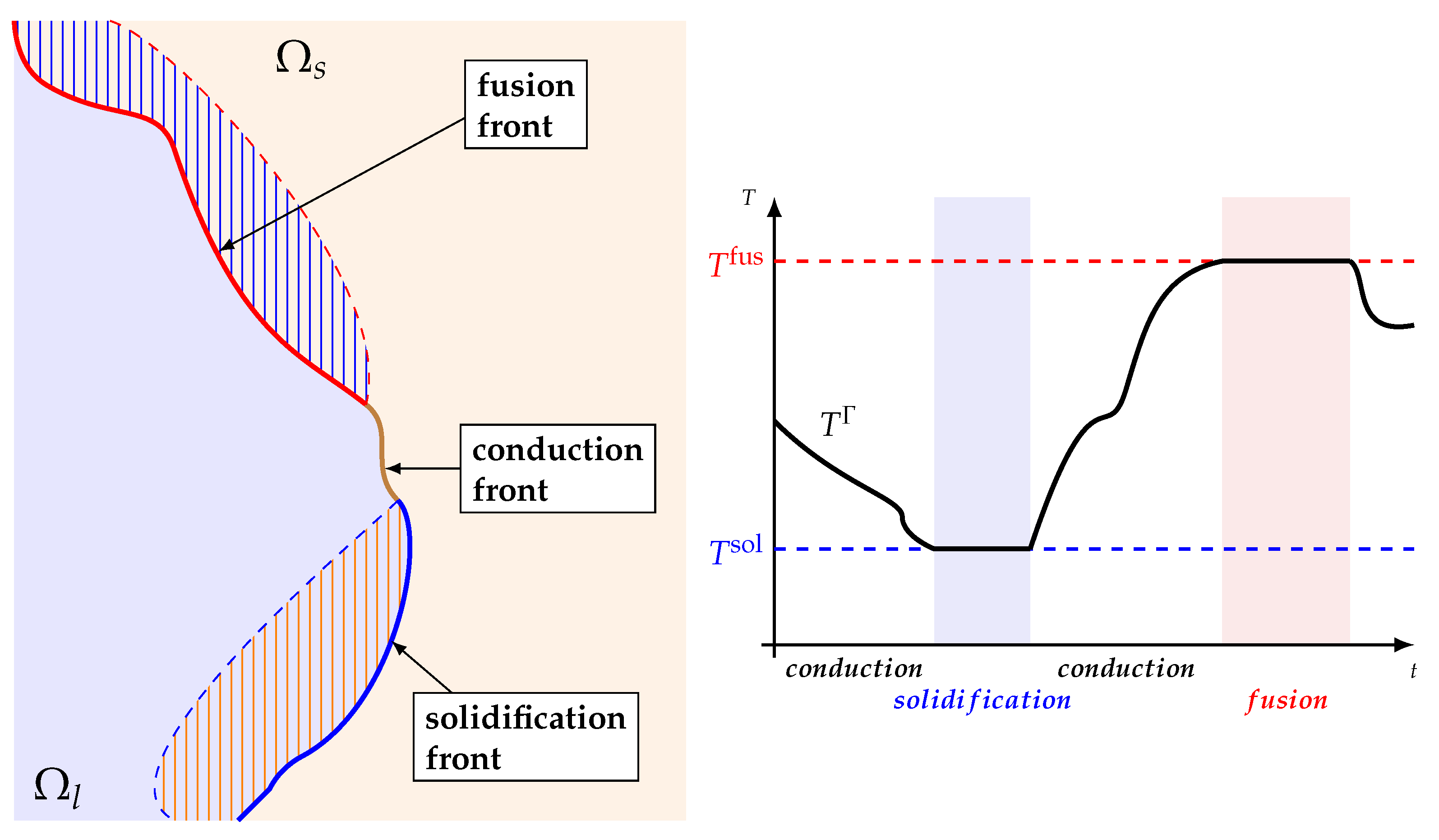
2.3. Conditions at the Phase Front
2.3.1. Stefan Condition at the Moving Phase Front
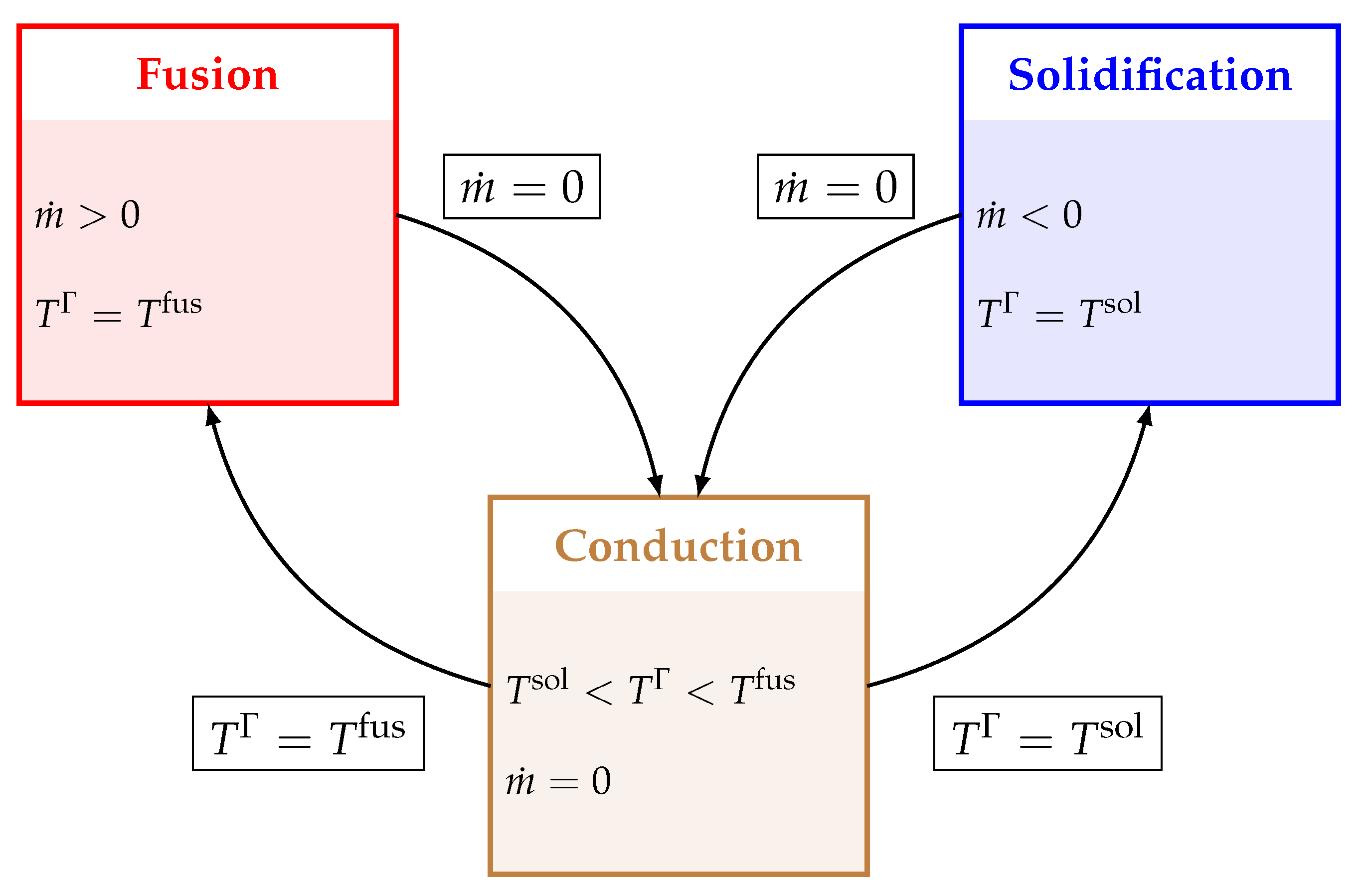
2.3.2. Interface States
3. Numerical Methods
3.1. Rationale
3.2. Time Discretization and Model Coupling
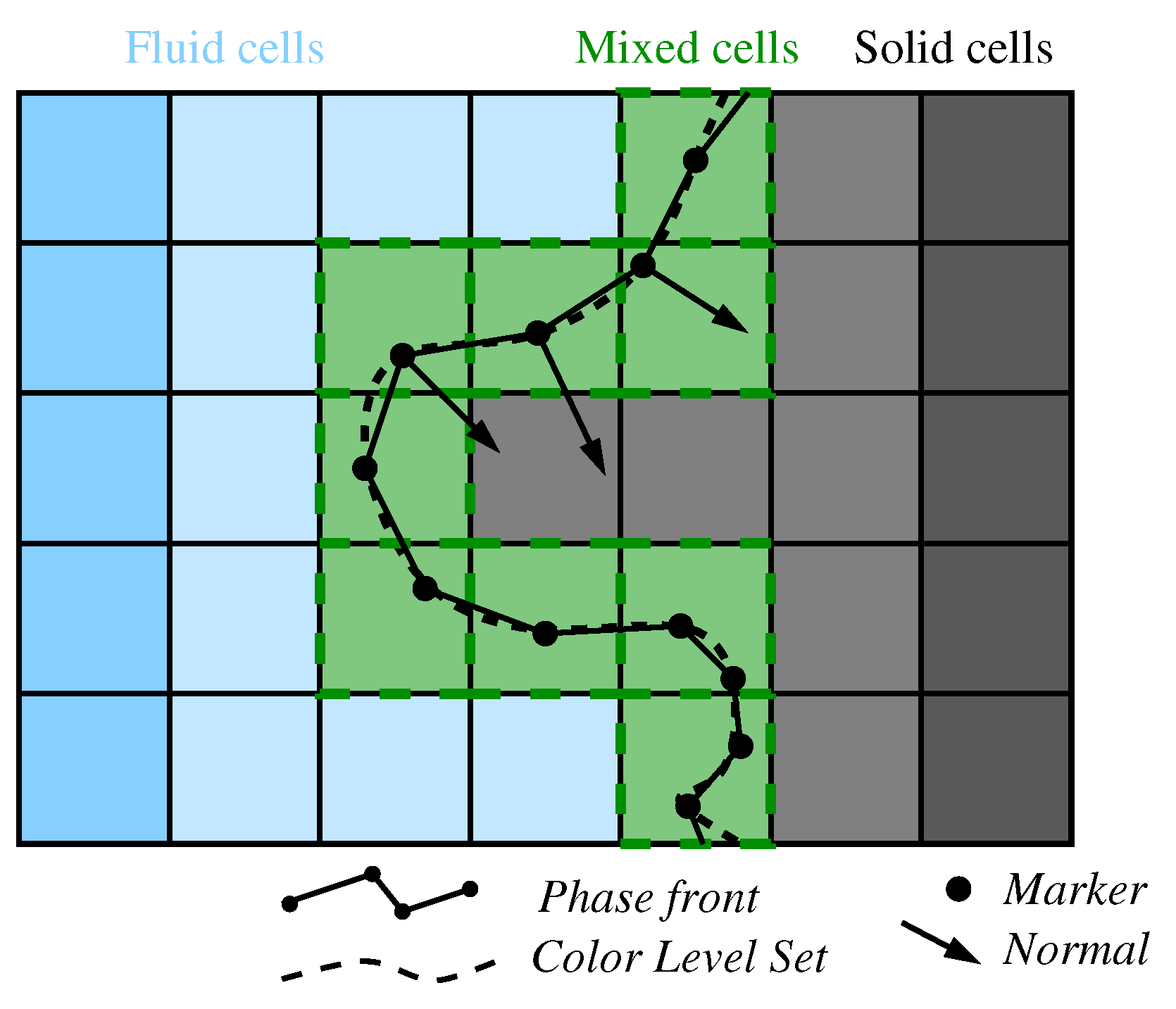
3.3. Mesh and Front Representation
Computational Mesh
3.4. Navier–Stokes Discretization via a Penalized Prediction-Correction Method
3.5. Interface Treatment: Motion and Geometrical Regularization
3.5.1. Displacement
3.5.2. Regularization/Smoothing
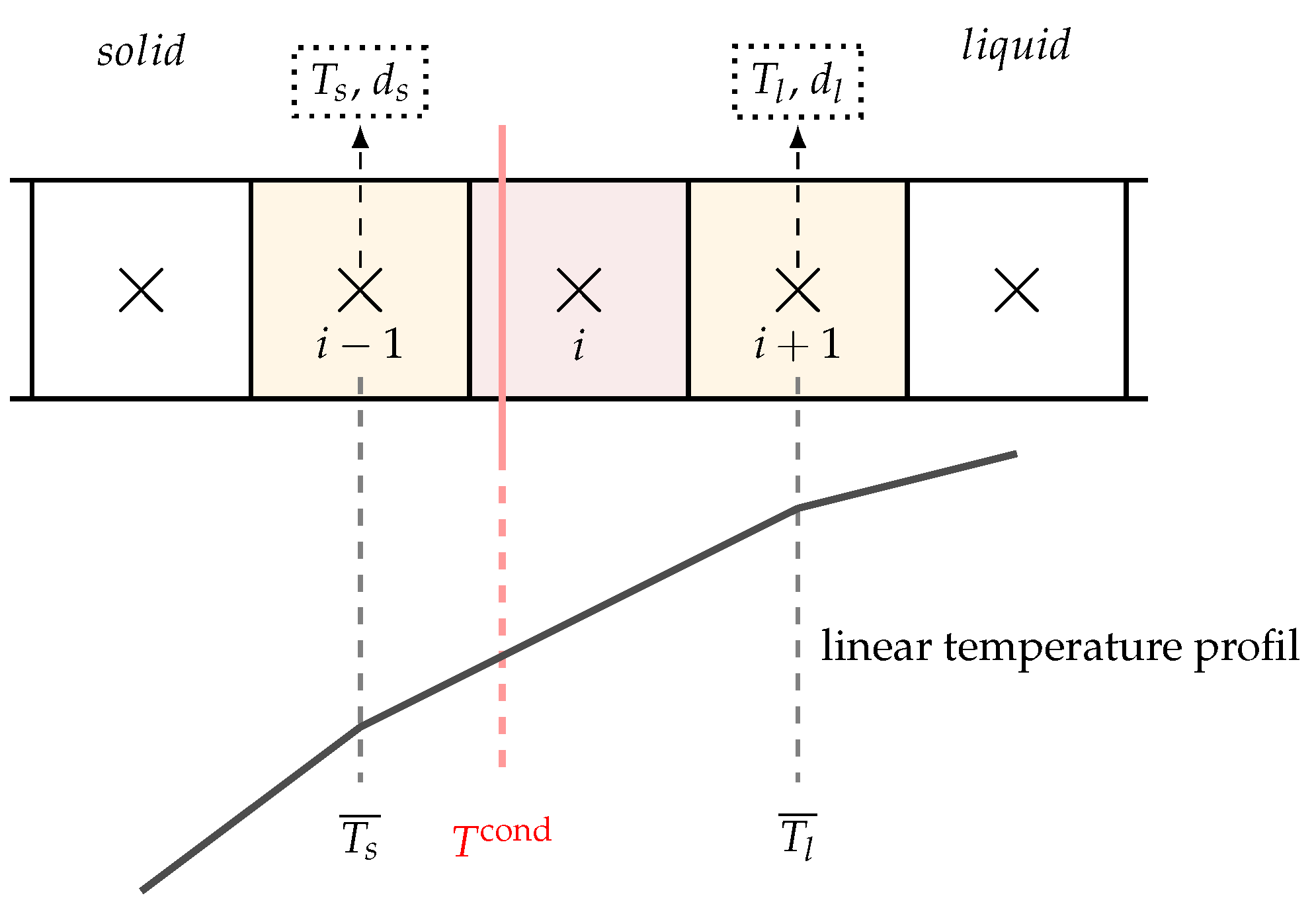
3.6. Ghost-Fluid Approach for Heat Transfer Equation
3.6.1. Temperature Gradient and Rate of Change
3.6.2. Interface Temperature/Interface State
4. Validation and Verification Test Suite
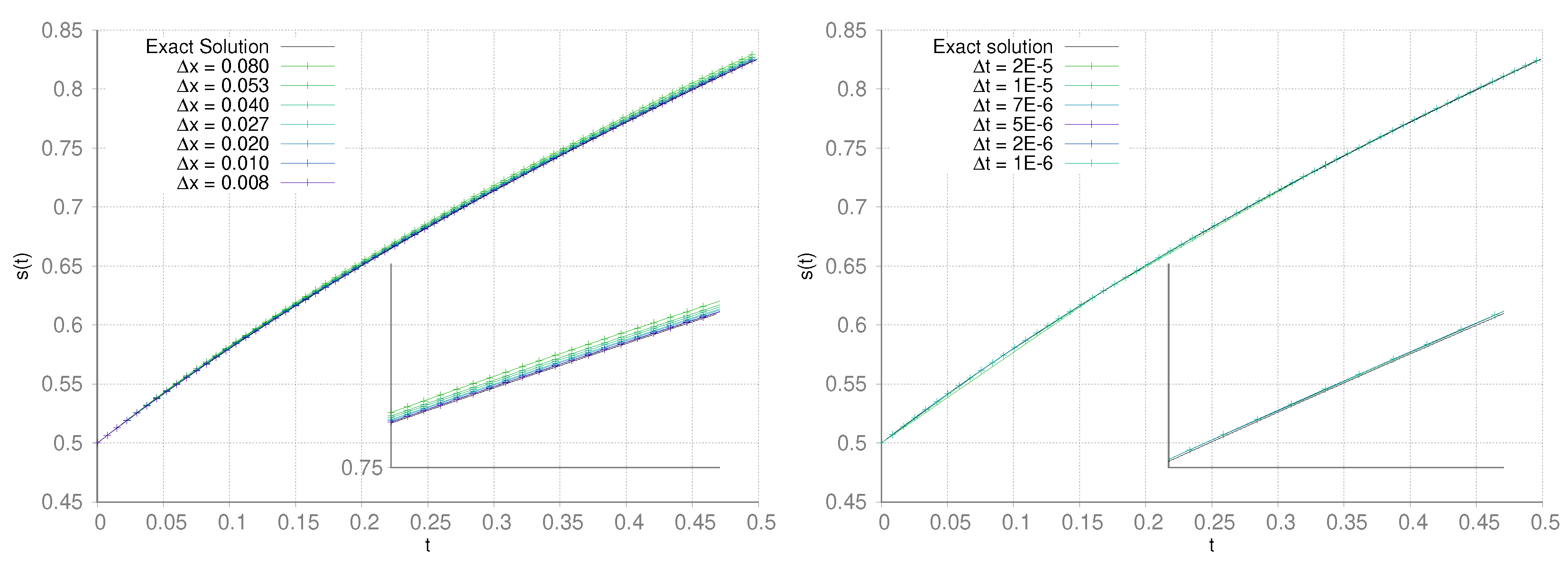
4.1. Stefan Problems
4.1.1. Configuration
4.1.2. Configuration
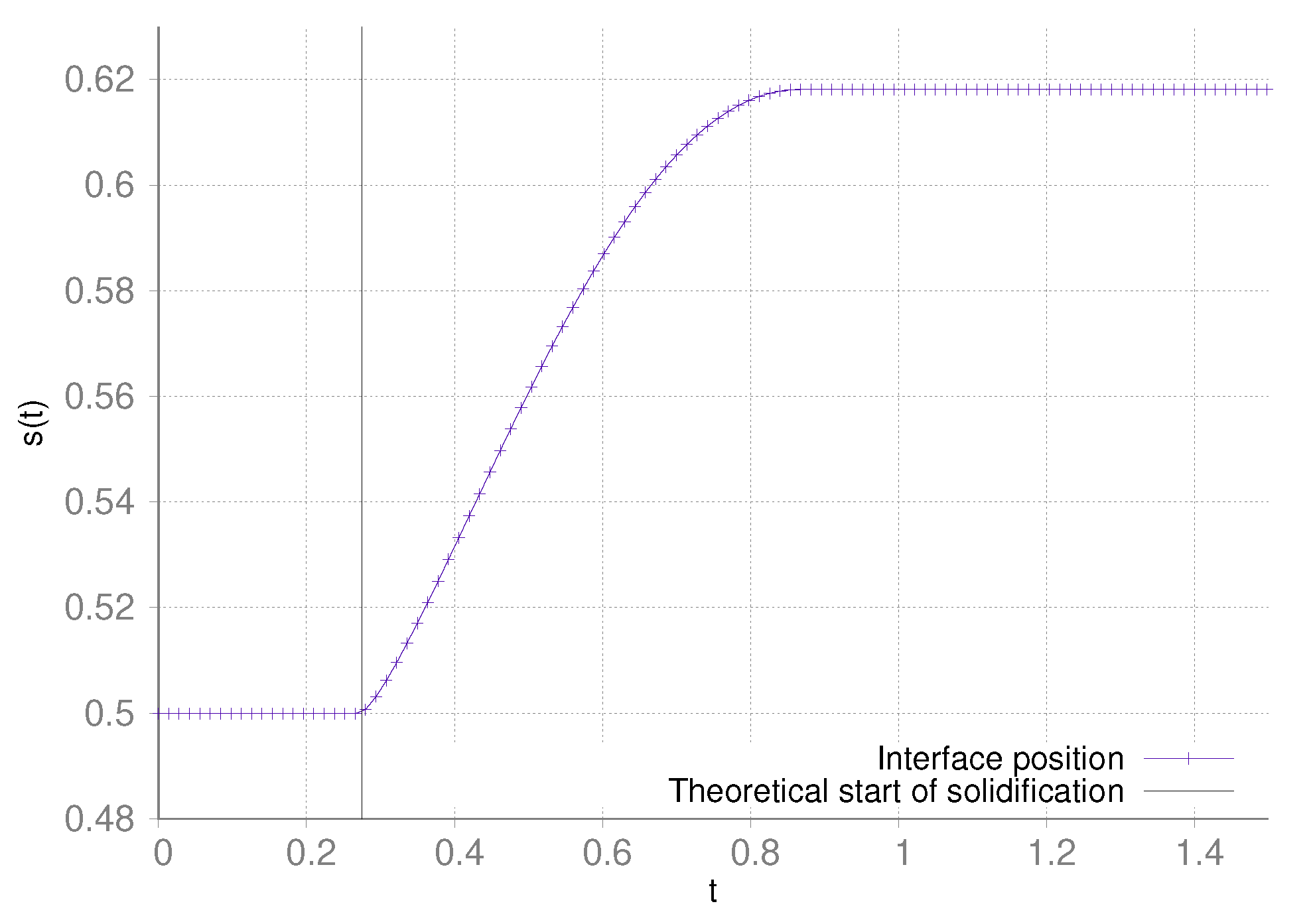
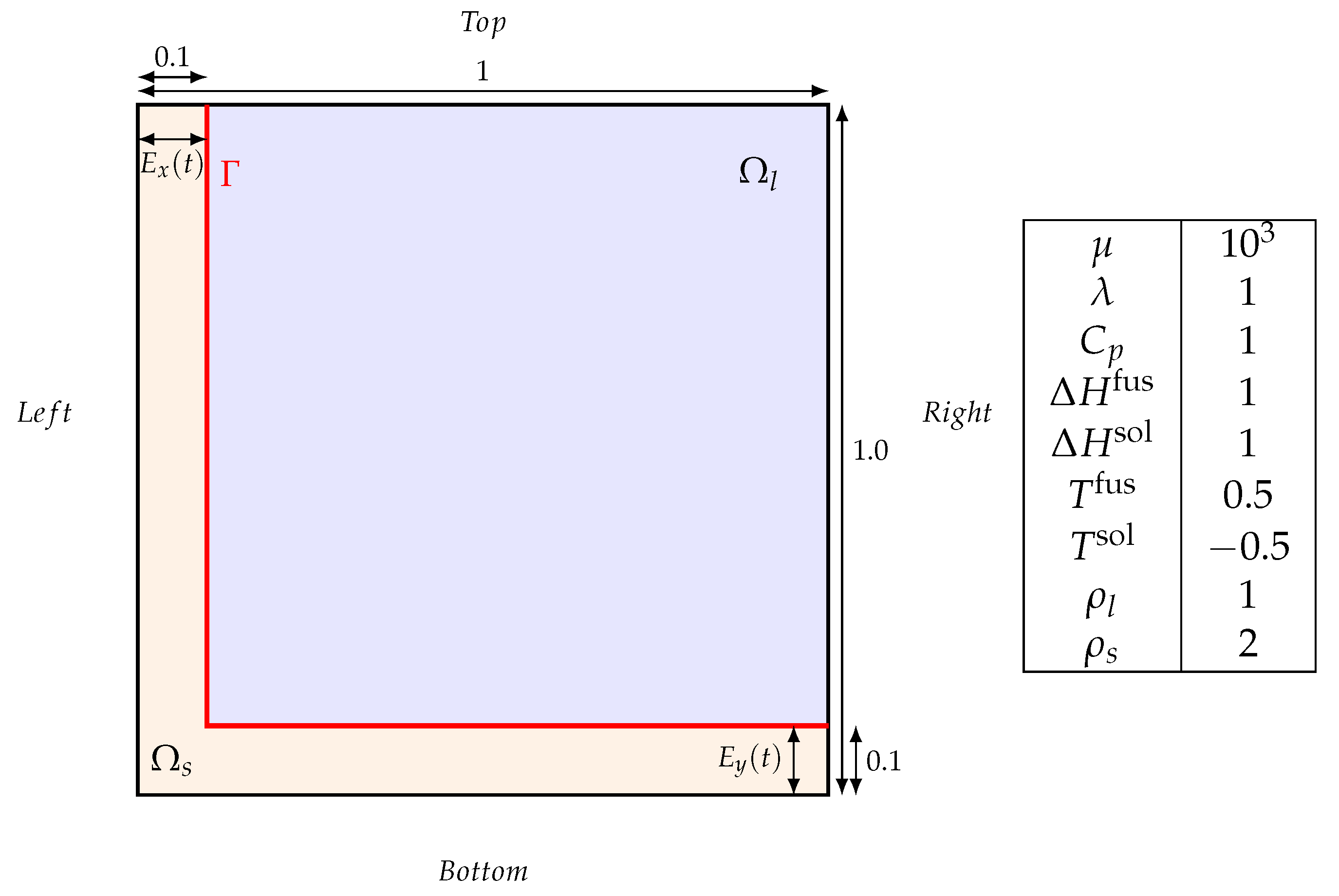
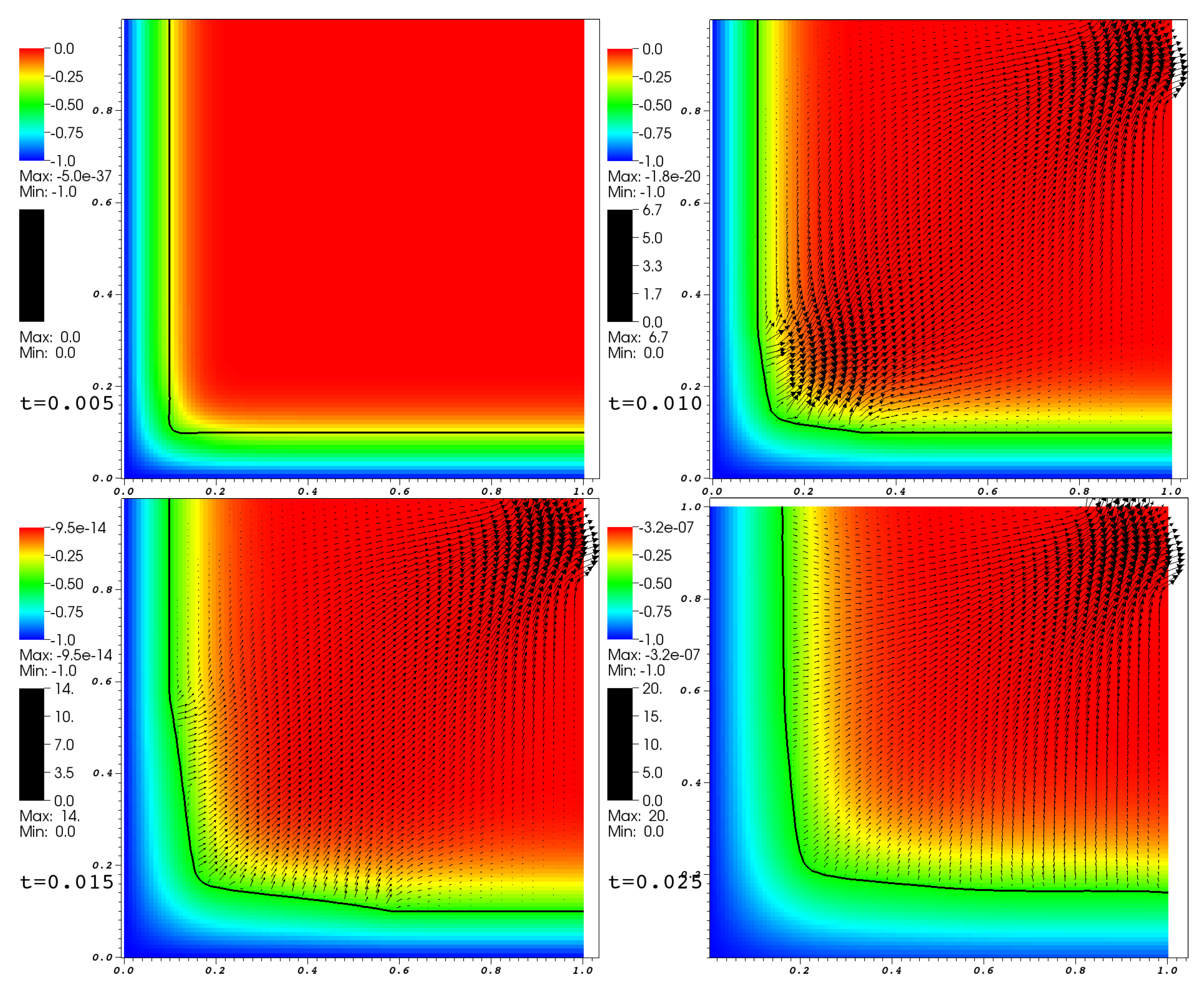
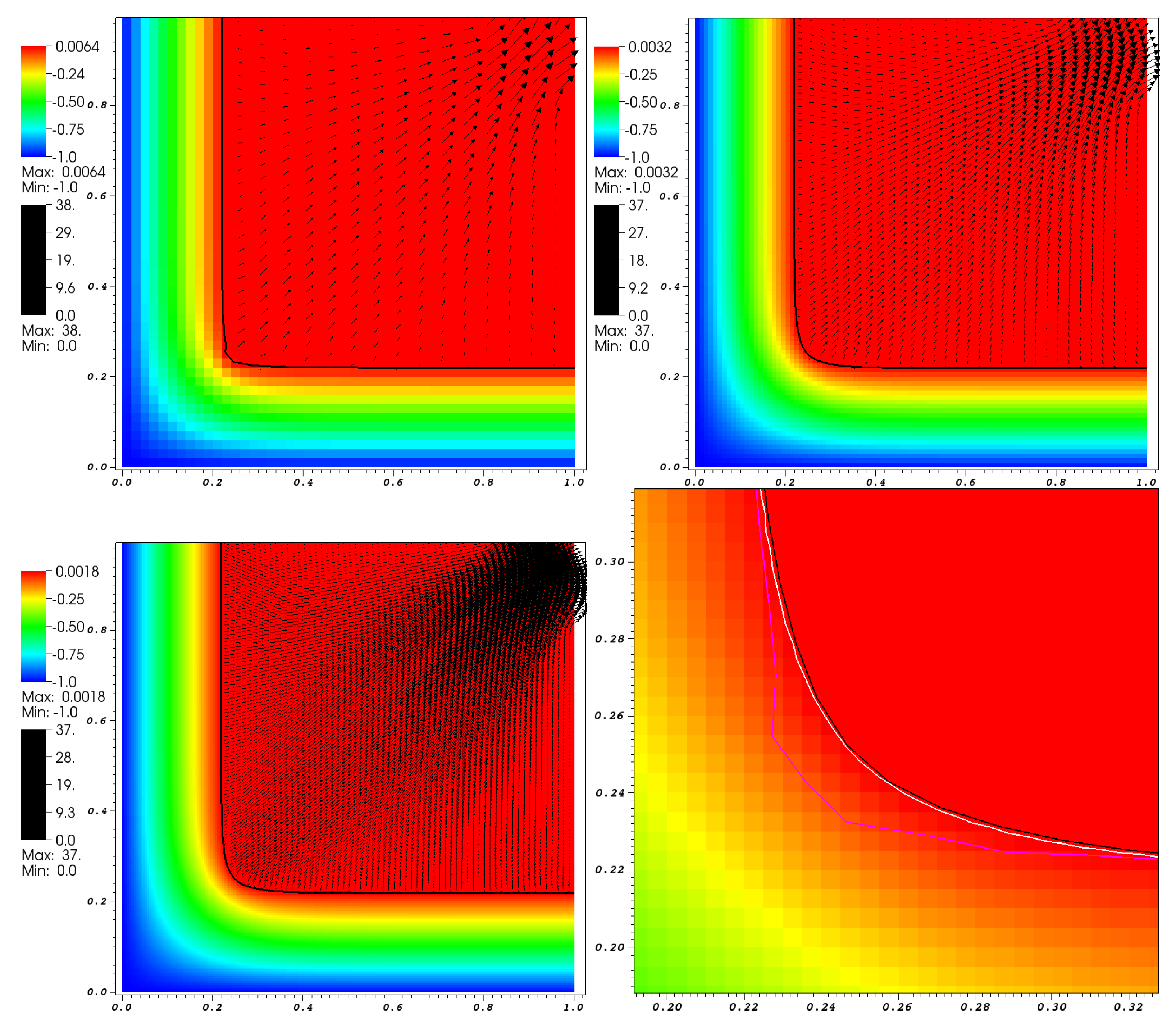
4.2. Two-Dimensional Corner Stefan-like Test Case
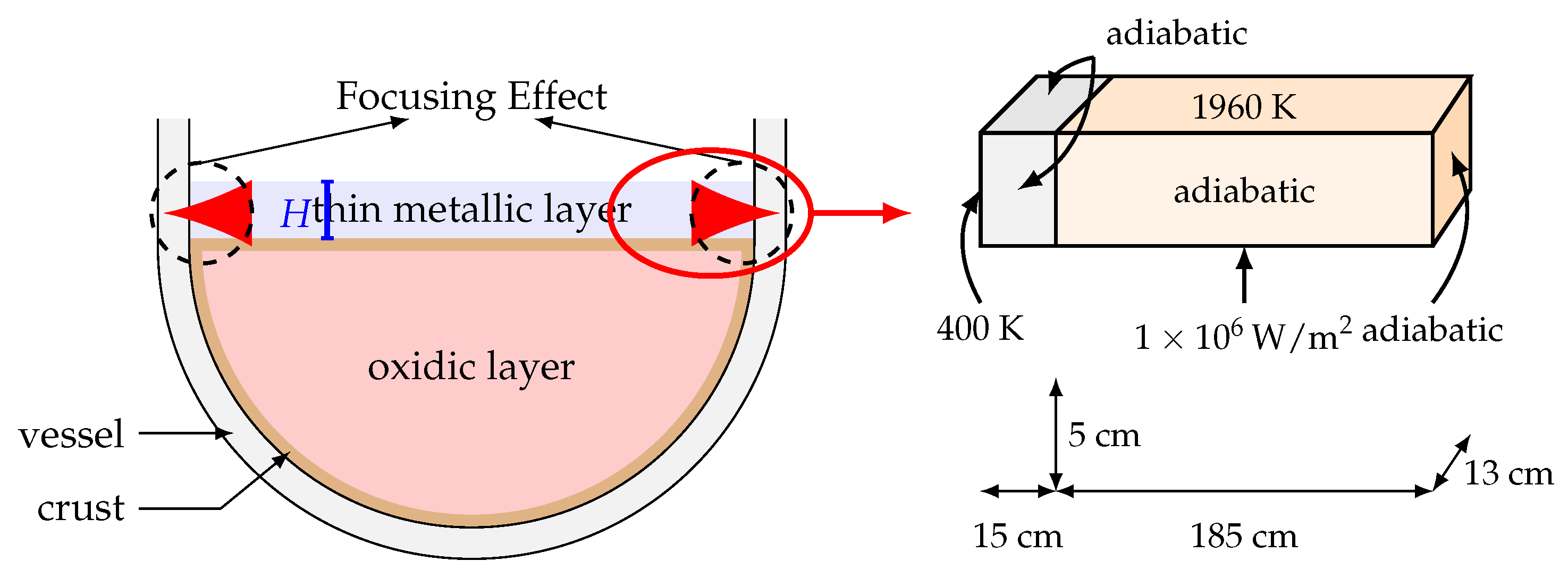
4.3. Focusing Effect within a Thin Metallic Layer
4.3.1. Test Case Description
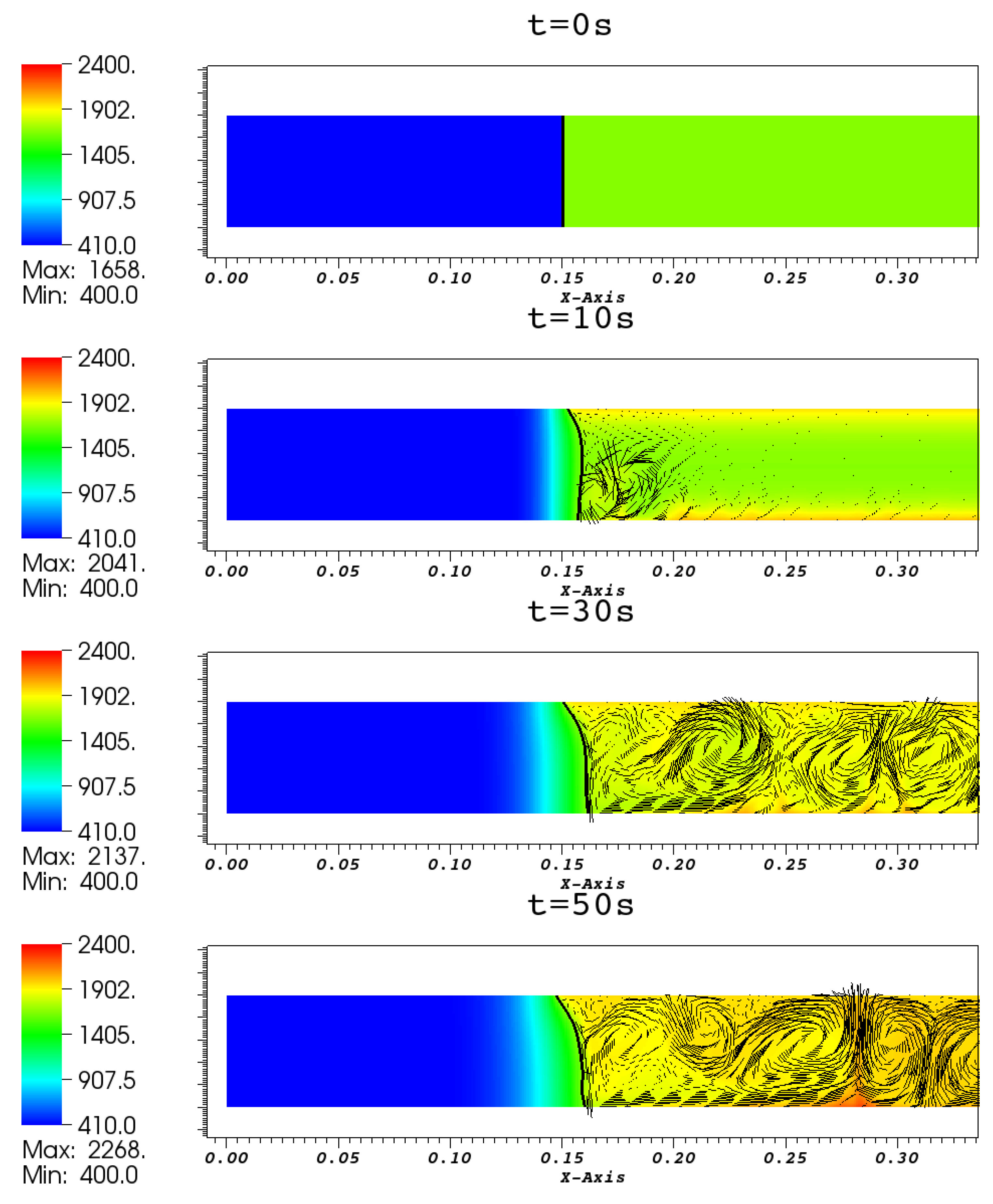
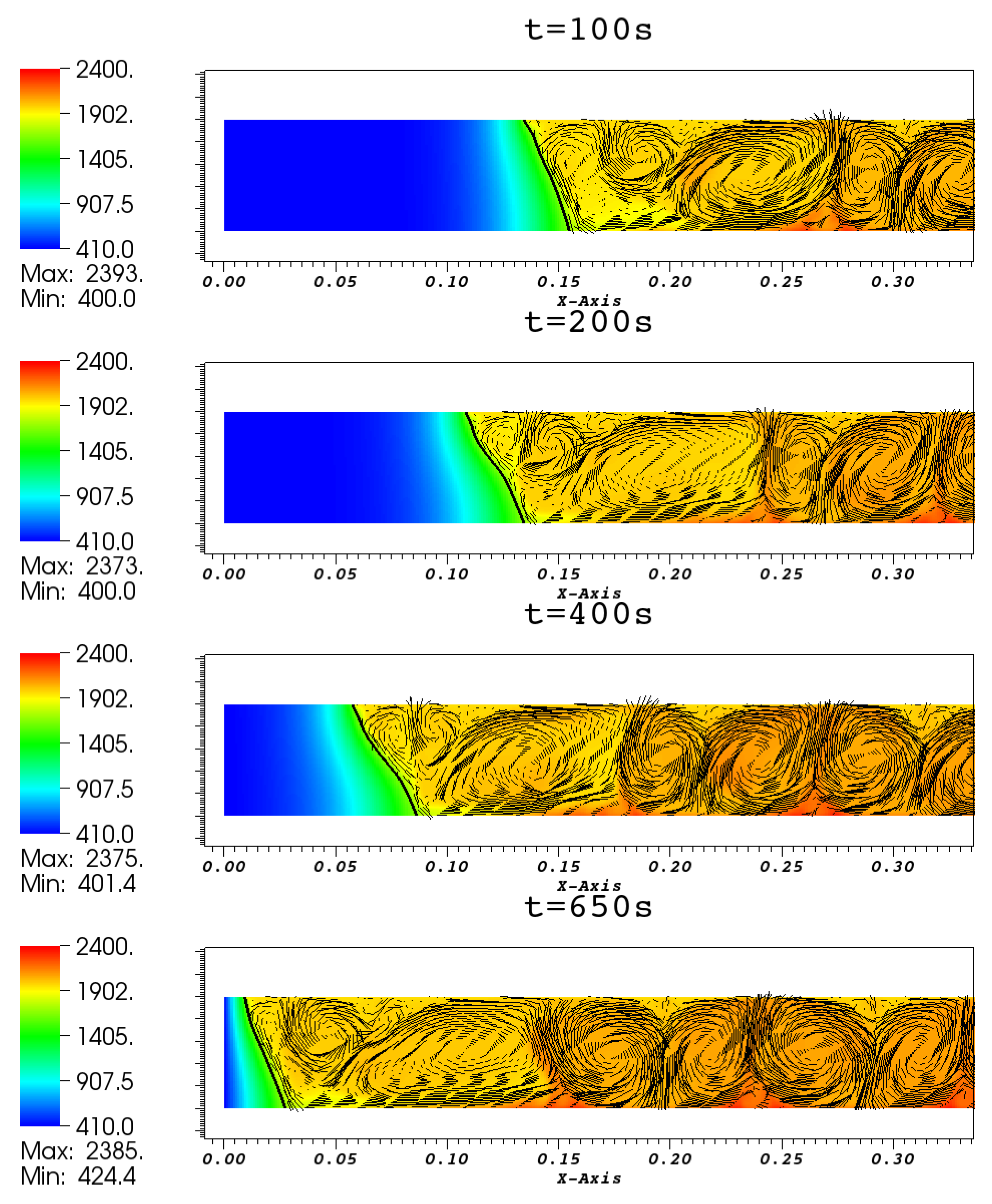
4.3.2. Two-Dimensional Simulations
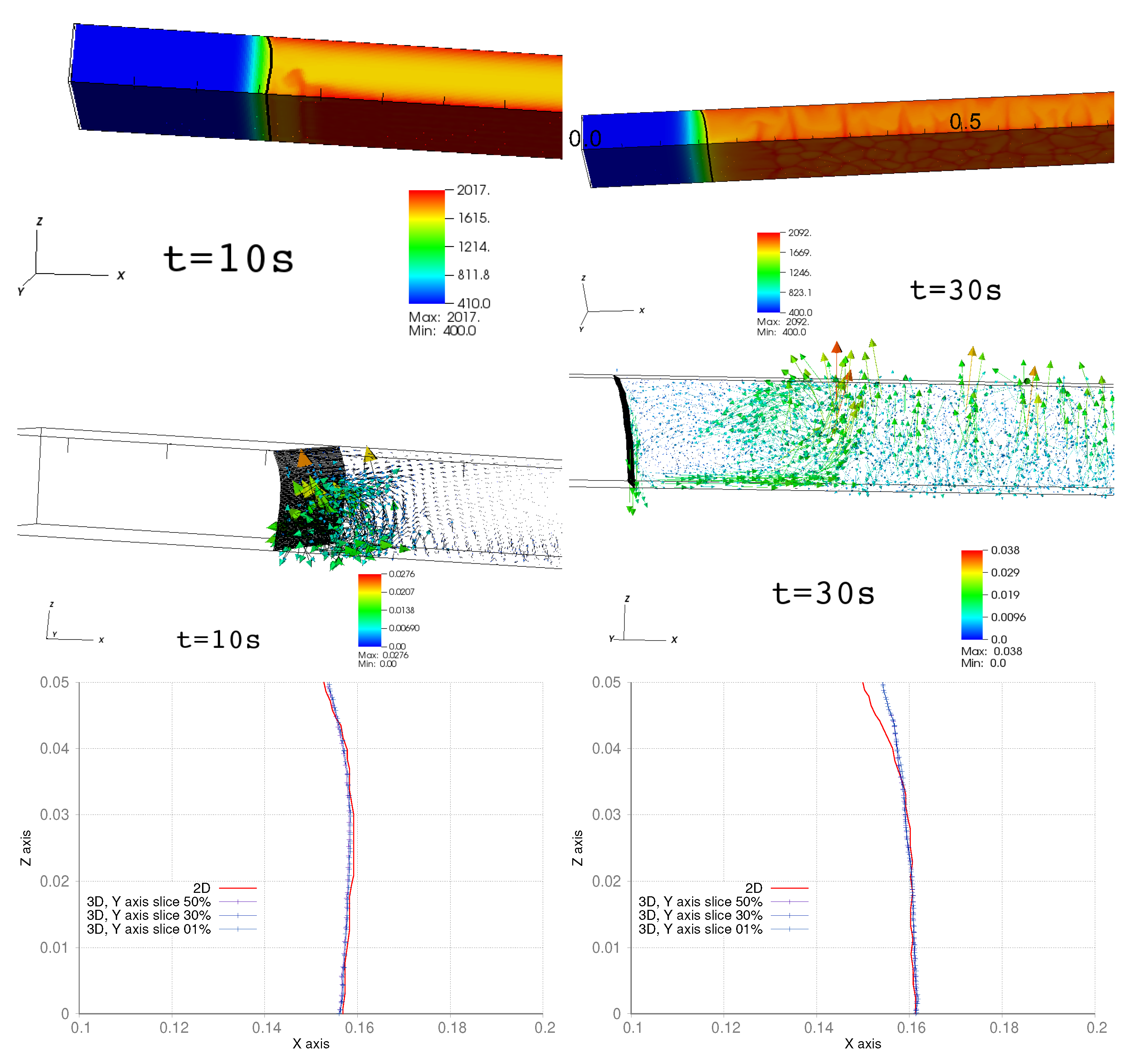
4.3.3. Three-Dimensional Simulations
5. Conclusions and Perspectives
- on a monolithic Navier–Stokes system of equations penalized in the solid phases and adapted to the specificity of such phase changes,
- on a Front-Tracking approach to follow the phase change front supplemented with a Volume-of-Fluid method to counter-fight possible lack of mass conservation,
- on monolithic heat equation supplemented with the Ghost-Fluid approach to deal with the discontinuity at the front.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Fedkiw, R.P.; Aslam, T.; Merriman, B.; Osher, S. A Non-oscillatory Eulerian Approach to Interfaces in Multimaterial Flows (the Ghost Fluid Method). J. Comput. Phys. 1999, 152, 457–492. [Google Scholar] [CrossRef]
- Chorin, A.J. Numerical solution of the Navier-Stokes equations. Math. Comput. 1968, 22, 745. [Google Scholar] [CrossRef]
- Puckett, E.G.; Almgren, A.S.; Bell, J.B.; Marcus, D.L.; Rider, W.J. A High-Order Projection Method for Tracking Fluid Interfaces in Variable Density Incompressible Flows. J. Comput. Phys. 1997, 130, 269–282. [Google Scholar] [CrossRef] [Green Version]
- Stefan, J. Über die Theorie der Eisbildung. Monatshefte Mat. Phys. 1890, 1, 1–6. [Google Scholar] [CrossRef]
- Tryggvason, G.; Bunner, B.; Esmaeeli, A.; Al-Rawahi, N. Computations of Multiphase Flows. In Advances in Applied Mechanics; Elsevier: Amsterdam, The Netherlands, 2003; pp. 81–120. [Google Scholar] [CrossRef]
- Voller, V. An overview of numerical methods for solving phase change problems. Adv. Numer. Heat Transfer 1997, 1, 341–380. [Google Scholar]
- Wei, H.; Chen, Y.T. Numerical investigation of the internally heated melt pool natural convection behavior with the consideration of different high internal Rayleigh numbers. Ann. Nucl. Energy 2020, 143, 107427. [Google Scholar] [CrossRef]
- Zanella, R.; Tellier, R.L.; Plapp, M.; Tegze, G.; Henry, H. Three-dimensional numerical simulation of droplet formation by Rayleigh–Taylor instability in multiphase corium. Nucl. Eng. Des. 2021, 379, 111177. [Google Scholar] [CrossRef]
- Peskin, C.S. Numerical analysis of blood flow in the heart. J. Comput. Phys. 1977, 25, 220–252. [Google Scholar] [CrossRef]
- Angot, P.; Bruneau, C.H.; Fabrie, P. A penalization method to take into account obstacles in incompressible viscous flows. Numer. Math. 1999, 81, 497–520. [Google Scholar] [CrossRef]
- Belliard, M.; Fournier, C. Penalized direct forcing and projection schemes for Navier–Stokes. Comptes Rendus Math. 2010, 348, 1133–1136. [Google Scholar] [CrossRef] [Green Version]
- Angeli, P.-E.; Bieder, U.; Fauchet, G. Overview of the TrioCFD code: Main features, V&V procedures and typical applications to engineering. In Proceedings of the 16th International Topical Meeting on Nuclear Reactor Thermal Hydraulics (NURETH-16), Chicago, IL, USA, 30 August–4 September 2015. [Google Scholar]
- Kamenomostskaya, S.L. On Stefan problem. Mat. Sb. 1961, 53, 489–514. (In Russian) [Google Scholar]
- Gupta, S. Chapter 1—The Stefan Problem and Its Classical Formulation. In The Classical Stefan Problem, 2nd ed.; Gupta, S., Ed.; Elsevier: Amsterdam, The Netherlands, 2018; pp. 1–35. [Google Scholar] [CrossRef]
- Bois, G. Transferts de Masse et d’énergie aux Interfaces Liquide/Vapeur avec Changement de Phase: Proposition de ModéLisation aux Grandes échelles des Interfaces. Ph.D. Thesis, Université Grenoble Alpes, Grenoble, France, 2011. [Google Scholar]
- Bois, G.M.B.; CEA-DES, Université Paris—Saclay, F-91191 Gif-sur-Yvette, France. Personal communication, 2021.
- Gibou, F.; Fedkiw, R. A fourth order accurate discretization for the Laplace and heat equations on arbitrary domains, with applications to the Stefan problem. J. Comput. Phys. 2005, 202, 577–601. [Google Scholar] [CrossRef] [Green Version]
- Angeli, P.E.; Puscas, M.A.; Fauchet, G.; Cartalade, A. FVCA8 Benchmark for the Stokes and Navier–Stokes Equations with the TrioCFD Code—Benchmark Session. In Finite Volumes for Complex Applications VIII—Methods and Theoretical Aspects; Cancès, C., Omnes, P., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 181–202. [Google Scholar]
- Leonard, B. A stable and accurate convective modelling procedure based on quadratic upstream interpolation. Comput. Methods Appl. Mech. Eng. 1979, 19, 59–98. [Google Scholar] [CrossRef]
- Lazaridis, A. A numerical solution of the multidimensional solidification (or melting) problem. Int. J. Heat Mass Transf. 1970, 13, 1459–1477. [Google Scholar] [CrossRef]
- King, J.R.; Riley, D.S.; Wallman, A.M. Two–dimensional solidification in a corner. Proc. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 1999, 455, 3449–3470. [Google Scholar] [CrossRef]
- Chessa, J.; Smolinski, P.; Belytschko, T. The extended finite element method (XFEM) for solidification problems. Int. J. Numer. Methods Eng. 2002, 53, 1959–1977. [Google Scholar] [CrossRef]
- Theofanous, T.; Liu, C.; Addition, S.; Angelini, S.; Kymalainen, O.; Salmassi, T. In-Vessel Coolability and Retention of a Core Melt. Nucl. Eng. Des. 1997, 169, 1–48. [Google Scholar] [CrossRef]
- Tuomisto, H.; Theofanous, T. A consistent approach to severe accident management. Nucl. Eng. Des. 1994, 148, 171–183. [Google Scholar] [CrossRef]
- Le Tellier, R.; Saas, L.; Bajard, S. Transient stratification modelling of a corium pool in a LWR vessel lower head. Nucl. Eng. Des. 2015, 287, 68–77. [Google Scholar] [CrossRef]
- Shams, A.; Dovizio, D.; Zwijsen, K.; Le Guennic, C.; Saas, L.; Le Tellier, R.; Peybernes, M.; Bigot, B.; Skrzypek, E.; Skrzypek, M.; et al. Status of computational fluid dynamics for in-vessel retention: Challenges and achievements. Ann. Nucl. Energy 2020, 135, 107004. [Google Scholar] [CrossRef]
- Drouillet, A.; Le Tellier, R.; Loubère, R.; Peybernes, M.; Viot, L. Multi-dimensional Simulation of Phase Change by a 0D-2D Model Coupling via Stefan Condition. Commun. Appl. Math. Comput. 2021. [Google Scholar] [CrossRef]
- Asmolov, V.; Ponomarev-Stepnoy, N.; Strizhov, V.; Sehgal, B. Challenges left in the area of in-vessel melt retention. Nucl. Eng. Des. 2001, 209, 87–96. [Google Scholar] [CrossRef]
- Dang, C.; Peybernes, M.; Tellier, R.L.; Saas, L. Numerical simulations of the Rayleigh-Bénard-Marangoni convections in a thin metallic layer. Ann. Nucl. Energy 2021, 150, 107848. [Google Scholar] [CrossRef]
- Bonnet, J.M.; Seiler, J.M. Thermal hydraulic phenomena in corium pools: The BALI experiment. In Proceedings of the 7th International Conference on Nuclear Engineering (ICONE-7), Tokyo, Japan, 19–23 April 1999. [Google Scholar]
- Peybernes, M.; Bigot, B.; Le Tellier, R. Use of CFD Results to Model Heat Transfer in a Thin Metal Layer. In Proceedings of the International Topical Meeting on Advances in Thermal Hydraulics ATH’2020, Paris, France, 20–23 October 2020; pp. 1180–1193. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Error | Order | Error | Order | Error | Order | ||
|---|---|---|---|---|---|---|---|
| 50 | 0.08 | – | – | – | |||
| 75 | 0.053 | ||||||
| 100 | 0.04 | ||||||
| 150 | 0.027 | ||||||
| 200 | 0.02 | ||||||
| 400 | 0.01 | ||||||
| 500 | 0.008 | ||||||
| – | – | average → | 0.97 | average → | 0.99 | average → | 0.99 |
| Parameter | Value |
|---|---|
| Density | 6720 |
| Coefficient of thermal expansion, | |
| Thermal conductivity, | 20 W/mK |
| Fusion temperature, | 1658 K |
| Enthalpy of fusion, | J/kg |
| Heat capacity, | 674 J/kg K |
| Kinematic viscosity, |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Drouillet, A.; Bois, G.; Le Tellier, R.; Loubère, R.; Peybernes, M. Mathematical Modeling and Associated Numerical Simulation of Fusion/Solidification Front Evolution in the Context of Severe Accident of Nuclear Power Engineering. Mathematics 2022, 10, 116. https://doi.org/10.3390/math10010116
Drouillet A, Bois G, Le Tellier R, Loubère R, Peybernes M. Mathematical Modeling and Associated Numerical Simulation of Fusion/Solidification Front Evolution in the Context of Severe Accident of Nuclear Power Engineering. Mathematics. 2022; 10(1):116. https://doi.org/10.3390/math10010116
Chicago/Turabian StyleDrouillet, Adrien, Guillaume Bois, Romain Le Tellier, Raphaël Loubère, and Mathieu Peybernes. 2022. "Mathematical Modeling and Associated Numerical Simulation of Fusion/Solidification Front Evolution in the Context of Severe Accident of Nuclear Power Engineering" Mathematics 10, no. 1: 116. https://doi.org/10.3390/math10010116