Extending Smart Phone Based Techniques to Provide AI Flavored Interaction with DIY Robots, over Wi-Fi and LoRa interfaces



Abstract
:1. Introduction
2. Pedagogical Methodology Details
3. Architectural Overview and Implementation Details
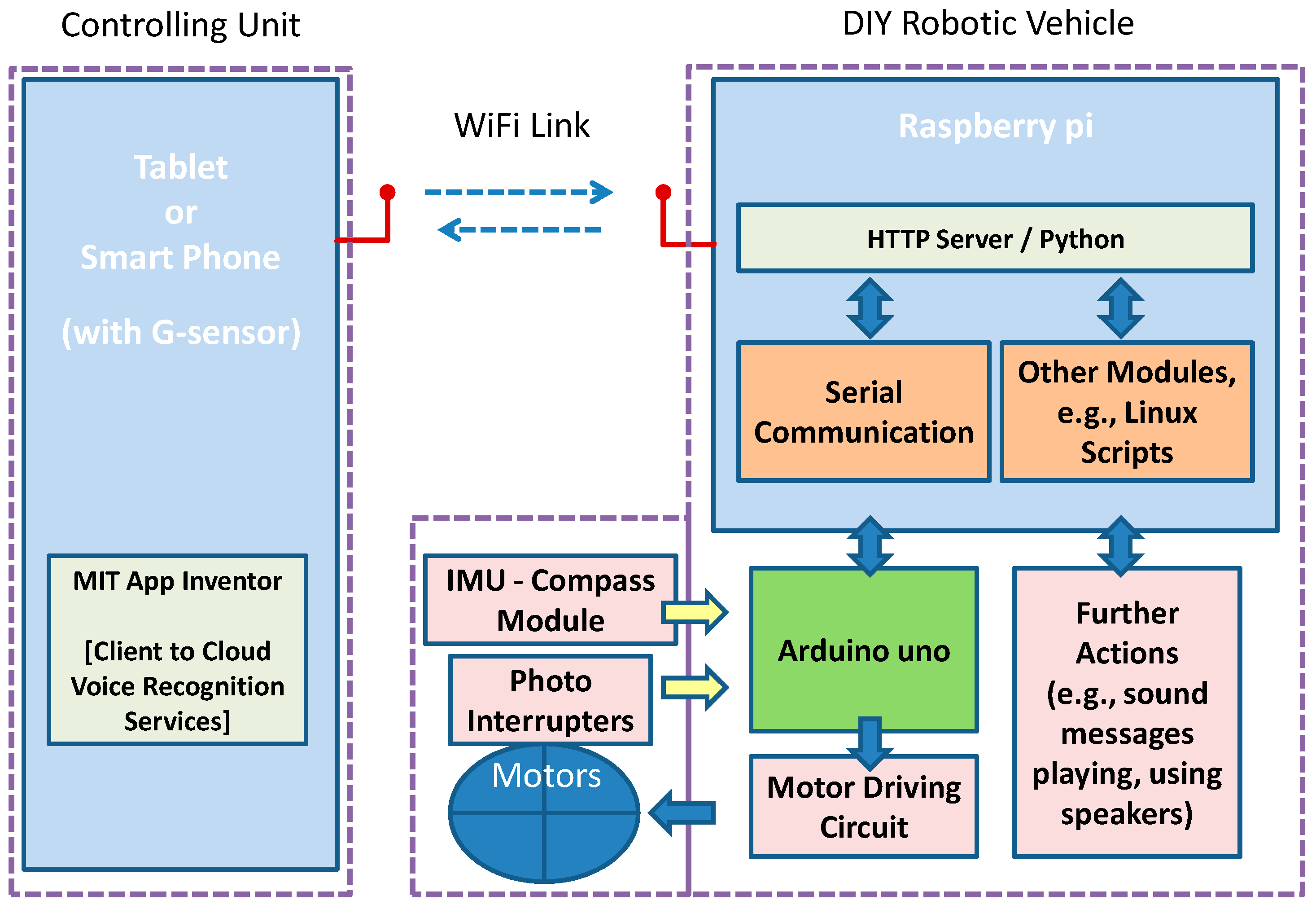
3.1. Electromechanical Layout
3.2. Human-Robot Interaction Design
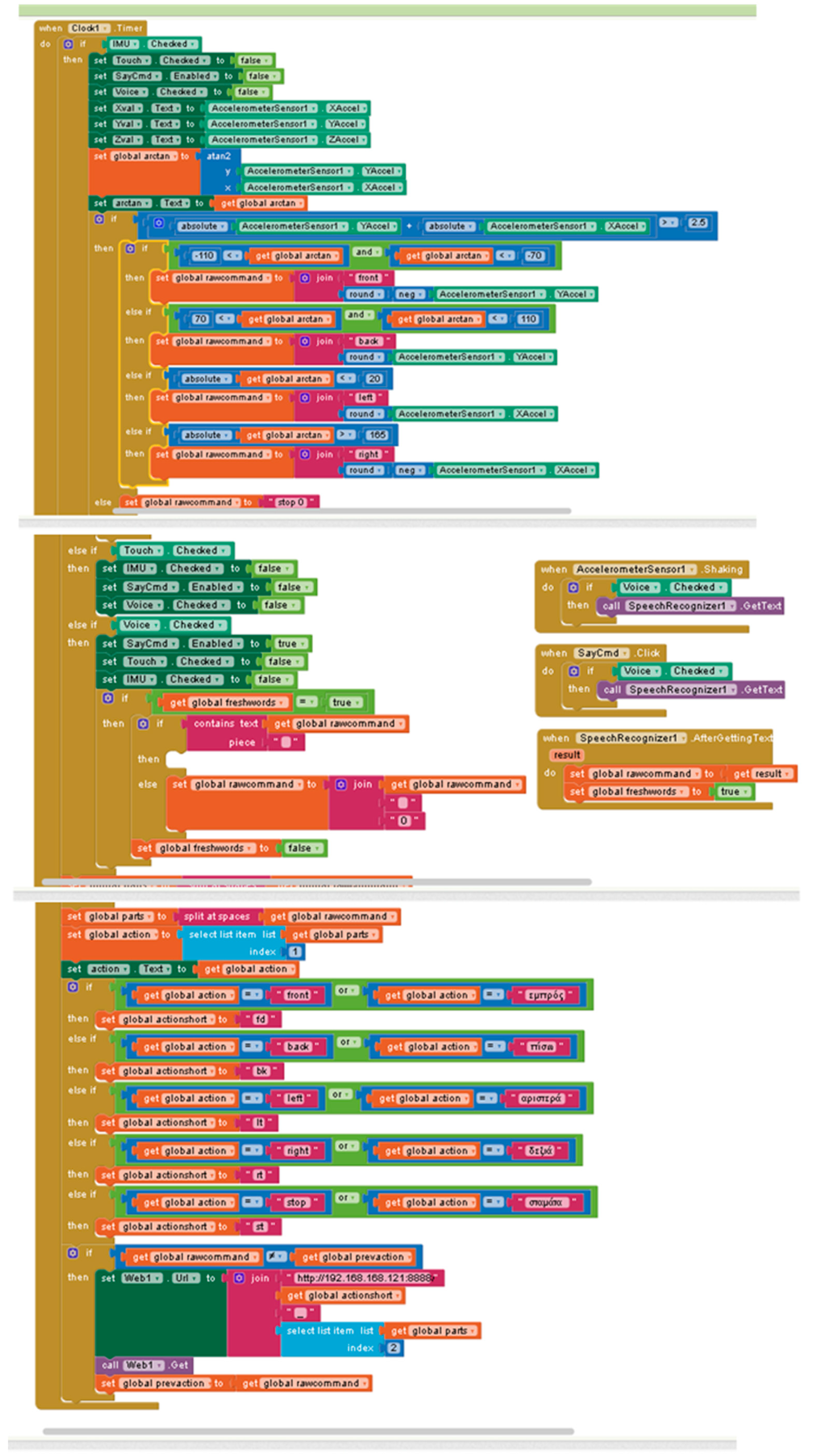
3.3. Human-Robot Interaction Software Details
4. Derived Improvements
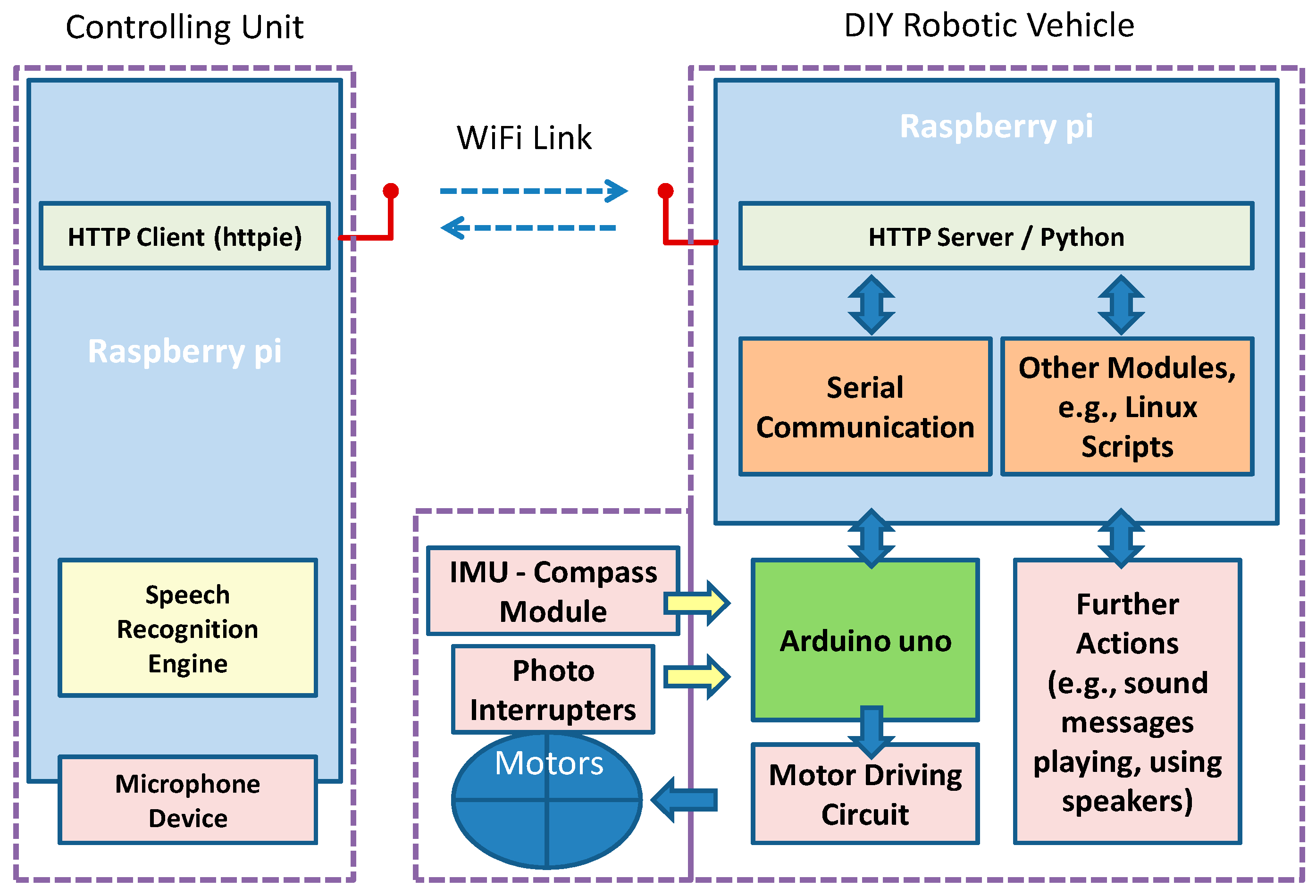
4.1. Adding Local Voice Recognition Capabilities
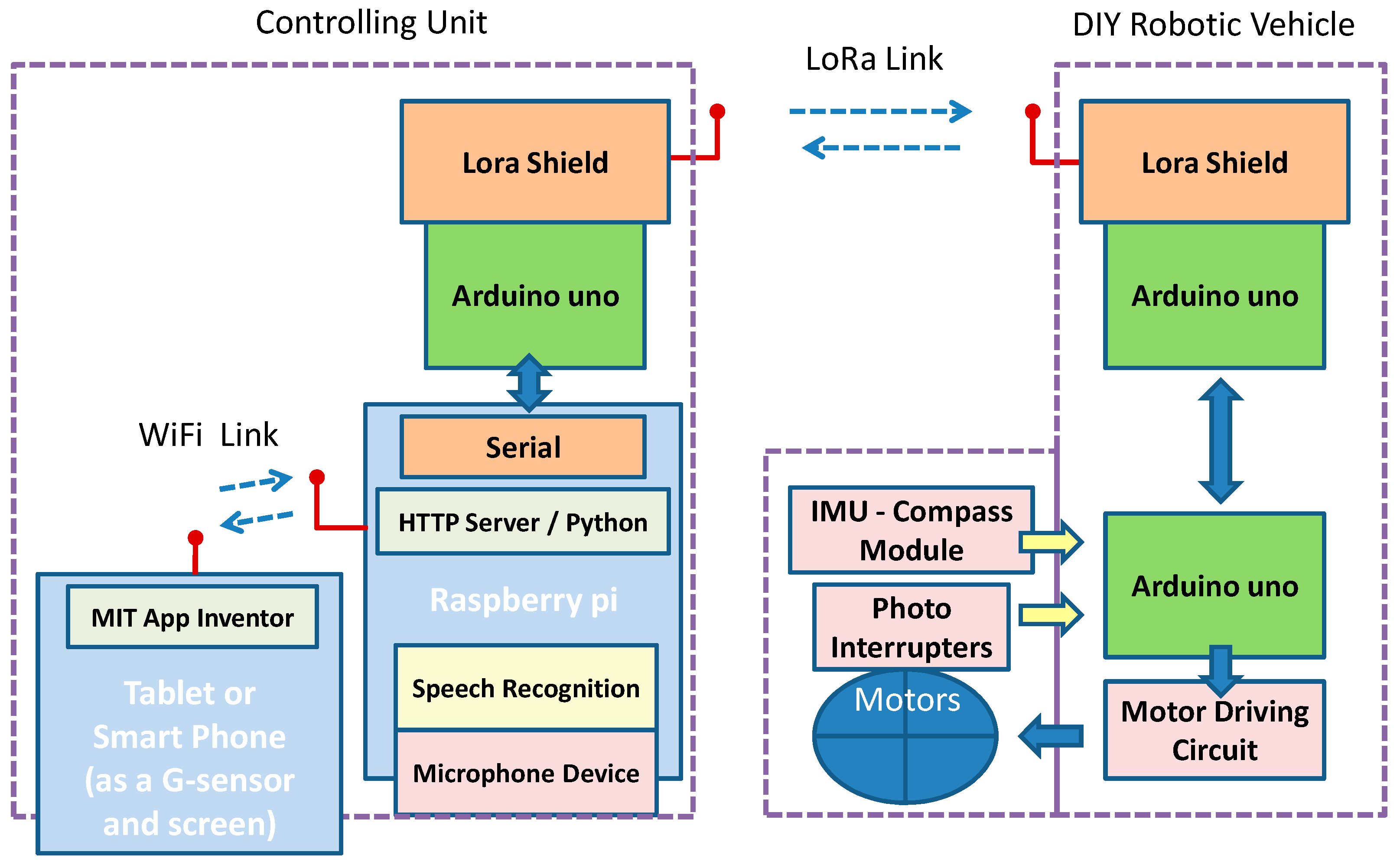
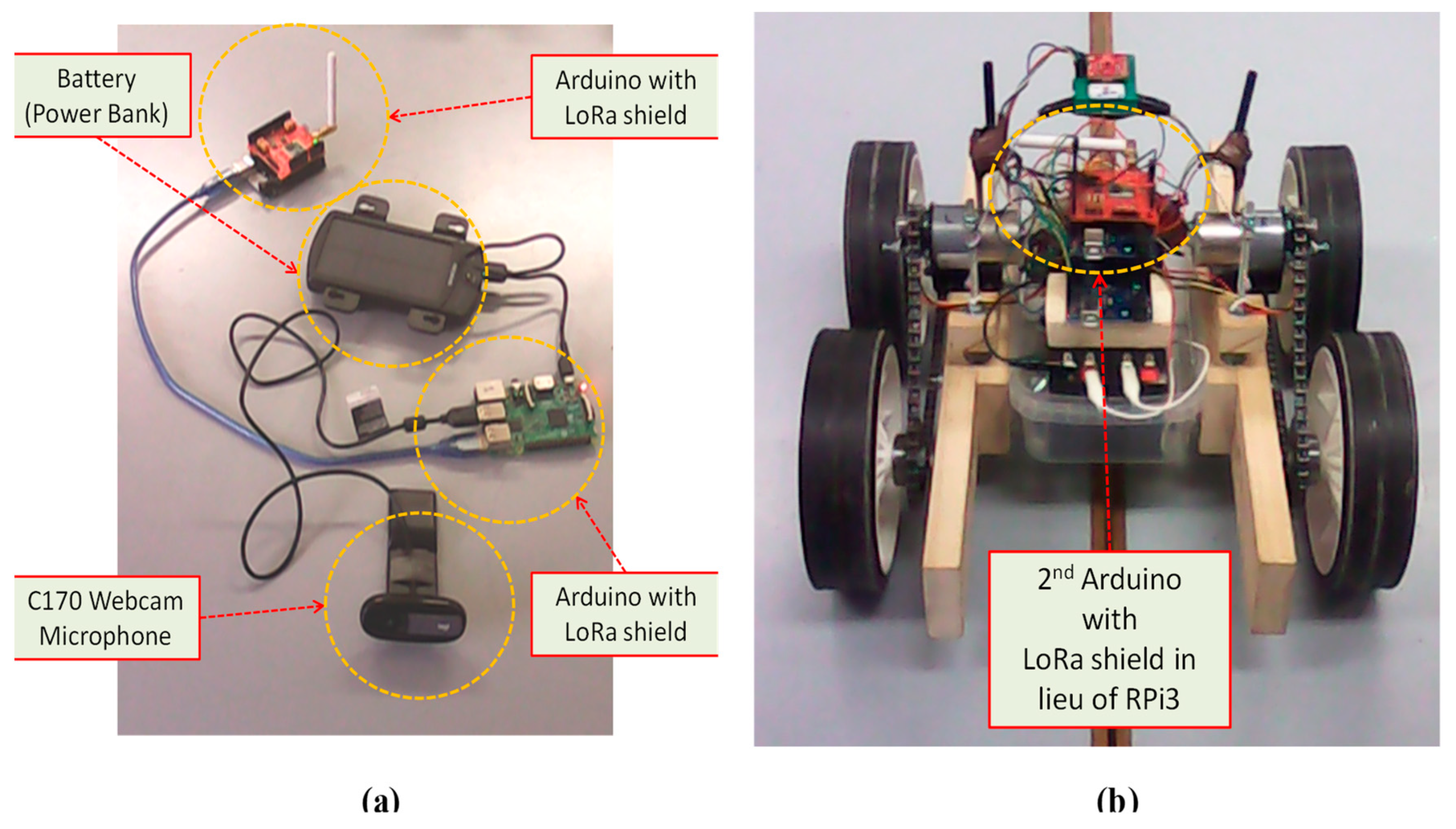
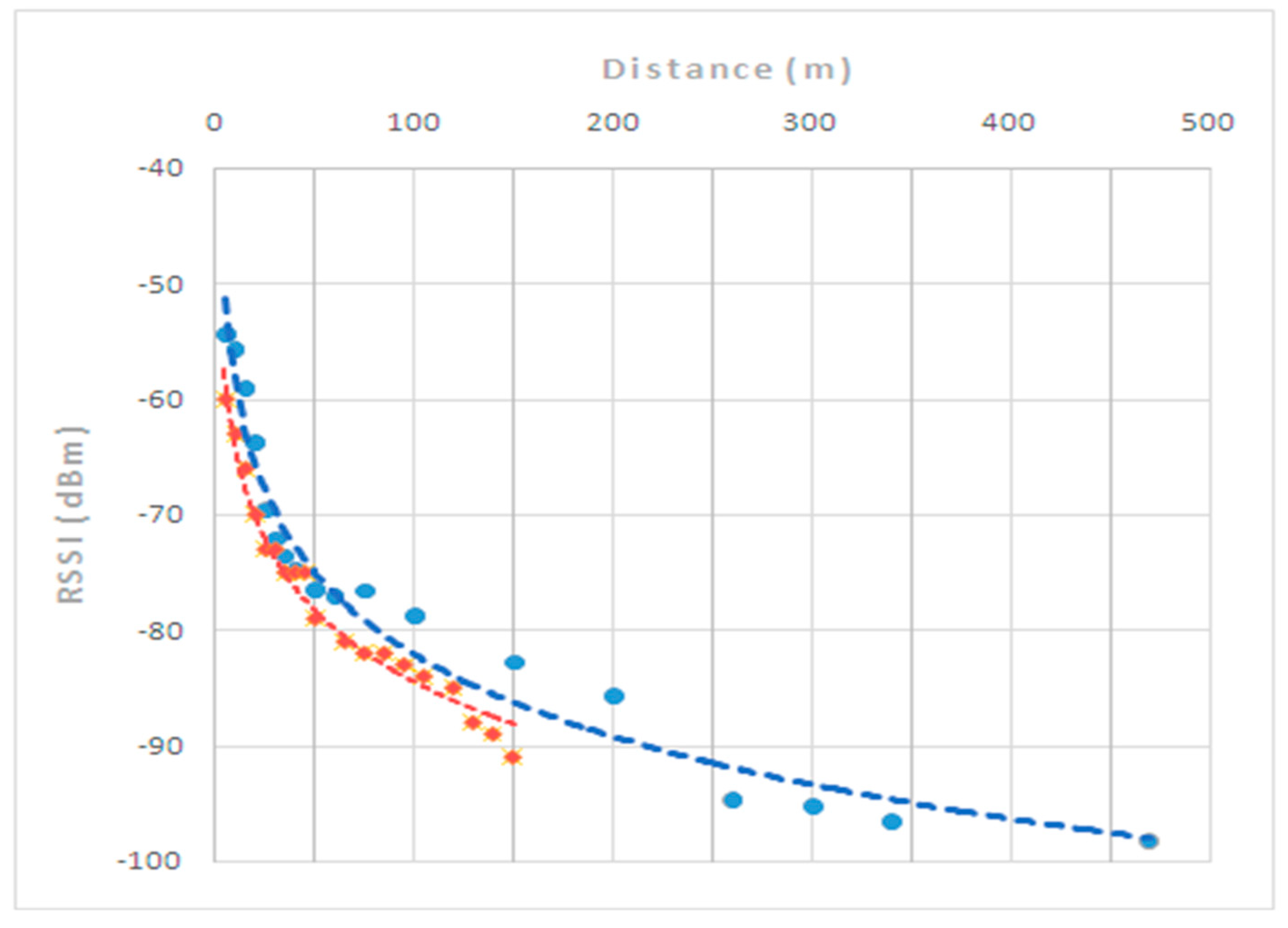
4.2. Extending the Controlling Distance Range
5. Evaluation of Methods and Discussion
5.1. Techical Point of View
5.2. Pedagogical Point of View
6. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Question Items | Mean |
|---|---|
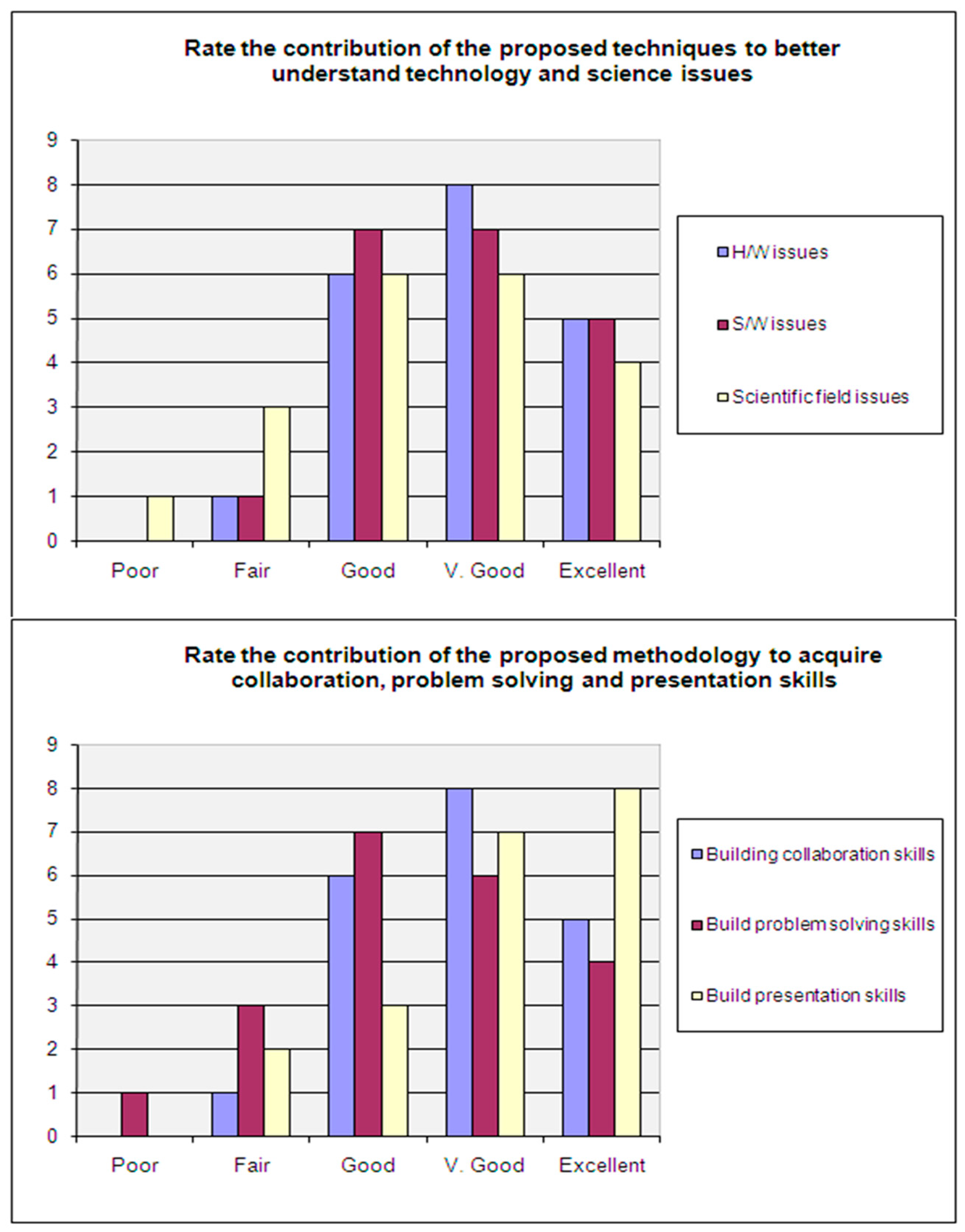
| Rate the contribution of the proposed techniques to better understand hardware issues (networking, motor driving, mechanical parts assembling, etc.). | 3.85 |
| Rate the contribution of the proposed techniques to better understand software issues (network programming, operating systems, AI, interface design, etc.). | 3.80 |
| Rate the contribution of the proposed techniques to better understand scientific field issues provided by your university curriculum. | 3.45 |
| Rate the contribution of the proposed techniques to become better in collaboration issues. | 3.85 |
| Rate the contribution of the proposed techniques to become better in problem solving issues. | 3.60 |
| Rate the contribution of the proposed techniques to become better in presenting a topic in public. | 4.05 |
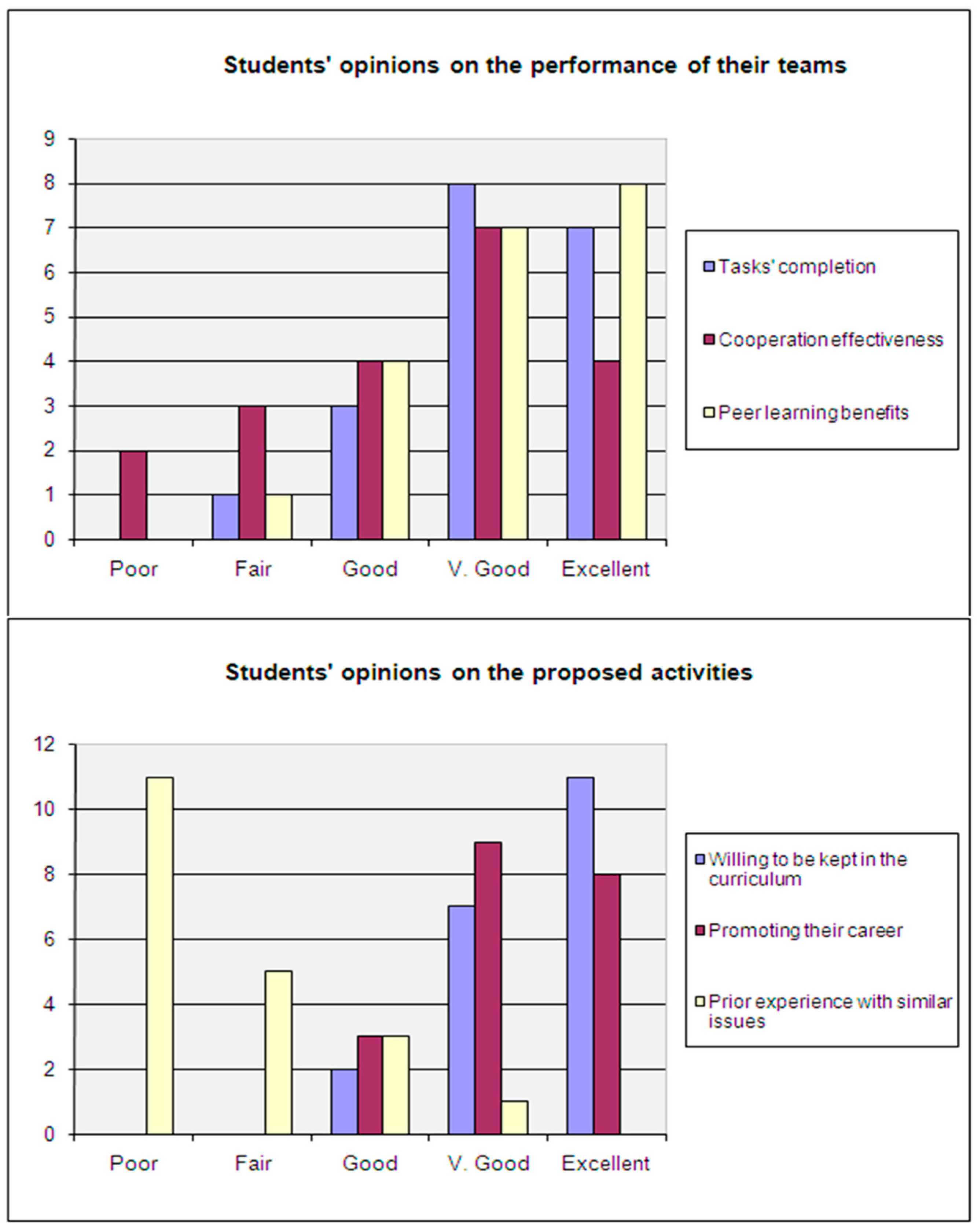
| Assess the degree of completion of the assigned tasks by your team, at the end of the project. | 3.90 |
| Assess the degree of the cooperation among the members of your team. | 3.40 |
| Rate to what extent you are satisfied of your peers, assisting you to better understand the issues needed to be accomplished. | 4.10 |
| Rate to what extent you would like to keep the proposed activities in the university lessons curriculum. | 4.45 |
| Rate to what extent the technologies and practices being used would promote your career. | 4.25 |
| Assess your previous experiences using similar devices and practices in your student life. | 1.70 |
References
- Arduino. Arduino Uno Board Description on the Official Arduino Site. 2019. Available online: https://store.arduino.cc/arduino-uno-rev3 (accessed on 18 April 2019).
- Raspberry. Raspberry Pi 3 Model B Board Description on the Official Raspberry Site. 2019. Available online: https://www.raspberrypi.org/products/raspberry-pi-3-model-b/ (accessed on 12 April 2019).
- Alimisis, D.; Moro, M.; Menegatti, E. Preface. In Educational Robotics in the Makers Era, Advances in Intelligent Systems and Computing 560; Alimisis, D., Ed.; Springer: Berlin, Germany, 2017. [Google Scholar]
- Alimisis, D. Educational Robotics: Open questions and new challenges. Themes Sci. Technol. Educ. 2013, 6, 63–71. [Google Scholar]
- Doran, M.V.; Clark, G.W. Enhancing Robotic Experiences throughout the Computing Curriculum. In Proceedings of the SIGCSE’18, Baltimore, MD, USA, 21–24 February 2018; ACM: New York, NY, USA, 2018; pp. 368–371. [Google Scholar]
- Alimisis, D.; Loukatos, D. STEM education post-graduate students’ training in the eCraft2Learn ecosystem. In Proceedings of the 2nd International Conference on Innovating STEM Education, Athen, Greece, 22–24 June 2018. [Google Scholar]
- Eaton, E. Teaching Integrated AI Through Interdisciplinary Project-Driven Courses. AI Mag. 2017, 38, 13–21. [Google Scholar] [CrossRef]
- FAO ‘Climate-smart Agriculture Sourcebook’. 2013. Available online: http://www.fao.org/3/i3325e/i3325e.pdf. (accessed on 18 April 2018).
- Symeonaki, E.G.; Arvanitis, K.G.; Piromalis, D.D. Cloud computing for IoT applications in climate-smart agriculture: A review on the trends and challenges towards sustainability. In Innovative Approaches and Applications for Sustainable Rural Development; Odoridis, A., Ragkos, A., Salampasis, M., Eds.; Springer: Cham, Switzerland, 2019; Volume 29, pp. 147–167. [Google Scholar]
- Bechar, A.; Vigneault, C. ‘Agricultural robots for field operations. Part 2: Operations and systems’. Biosyst. Eng. 2017, 153, 110–128. [Google Scholar] [CrossRef]
- Krishna, K.R. Push button Agriculture: Robotics, Drones, Satellite-Guided Soil and Crop Management; Apple Academic Press: Oakville, ON, Canada, 2016; ISBN 978-1-77188-305-4. [Google Scholar]
- UK-RAS Network: Robotics & Autonomous Systems Agricultural robotics: The Future of Agricultural Robots, UK-RAS White Papers. Available online: https://arxiv.org/ftp/arxiv/papers/1806/1806.06762.pdf. (accessed on 24 April 2019).
- Blikstein, P. Digital Fabrication and ’Making’ in Education: The Democratization of Invention. In FabLabs: Of Machines, Makers and Inventors; Walter-Herrmann, J., Büching, C., Eds.; Transcript Publishers: Bielefeld, Germany, 2013. [Google Scholar]
- Schon, S.; Ebner, M.; Kumar, S. The Maker Movement Implications from modern fabrication, new digital gadgets, and hacking for creative learning and teaching. Laia Canals. P.A.U. Education, Ed.; eLearning Papers. 2014, pp. 86–100. Available online: https://www.researchgate.net/publication/263655746_The_Maker_Movement_Implications_of_new_digital_gadgets_fabrication_tools_and_spaces_for_creative_learning_and_teaching (accessed on 26 August 2019).
- Kahn, K.; Winters, N. Child-Friendly Programming Interfaces to AI Cloud Services. In Data Driven Approaches in Digital Education. EC-TEL 2017. Lecture Notes in Computer; Lavoué, É., Drachsler, H., Verbert, K., Broisin, J., Pérez-Sanagustín, M., Eds.; Science; Springer: Cham, Germany, 2017; Volume 10474. [Google Scholar]
- Available online: https://en.wikipedia.org/wiki/Artificial_intelligence. (accessed on 12 April 2019).
- Wi-Fi–IEEE 802.11 Standard. 2019. Available online: http://www.ieee802.org/11/ (accessed on 10 May 2019).
- MIT App Inventor. 2019. Available online: http://appinventor.mit.edu/explore/. (accessed on 10 May 2019).
- Python Programming Language. 2019. Available online: https://en.wikipedia.org/wiki/Python (accessed on 10 April 2019).
- Borges, J.; Dias, T.G.; Cunha, J.F. A new group-formation method for student projects. Eur. J. Eng. Educ. 2019, 34, 573–585. [Google Scholar] [CrossRef]
- Markham, T. Project Based Learning. Teach. Libr. 2011, 39, 38–42. [Google Scholar]
- Smith, B.L.; MacGregor, J.T. What is collaborative learning. In Collaborative Learning: A Sourcebook for Higher Education; Goodsell, A.S., Maher, M.R., Tinto, V., Eds.; National Center on Postsecondary Teaching, Learning, & Assessment, Syracuse University: Syracuse, NY, USA, 1992. [Google Scholar]
- Anderson, L.W.; Krathwohl, D.R. A Taxonomy for Learning, Teaching, and Assessing: A Revision of Bloom’s Taxonomy of Educational Objectives. In Pearson Education Group; Allyn & Bacon: Boston, MA, USA, 2001. [Google Scholar]
- King, A. Structuring Peer Interaction to Promote High-Level Cognitive Processing. Theory Pract. 2002, 41, 33–39. [Google Scholar] [CrossRef]
- HTTP, Hypertext Transfer Protocol. 2019. Available online: https://en.wikipedia.org/wiki/Hypertext_Transfer_Protocol (accessed on 11 May 2019).
- BaseHTTPServer. Available online: https://wiki.python.org/moin/BaseHttpServer (accessed on 11 May 2019).
- OS–Miscellaneous Operating System Interfaces (Python). 2019. Available online: https://docs.python.org/3/library/os.html (accessed on 12 April 2019).
- mpg321-A Simple and Lightweight Command Line MP3 Player. 2019. Available online: http://mpg321.sourceforge.net/ (accessed on 12 April 2019).
- eSpeak–Speech Synthesizer. 2019. Available online: http://espeak.sourceforge.net/ (accessed on 20 April 2019).
- Sound Pattern Recognition–SOPARE. 2019. Available online: https://www.bishoph.org/ (accessed on 10 April 2019).
- HTTPie, A command line HTTP client. 2019. Available online: https://httpie.org/ (accessed on 18 April 2019).
- LoRa, LoRa Protocol Description on Wikipedia. 2019. Available online: https:// en.wikipedia.org/wiki/LoRa (accessed on 14 April 2019).
- Draguino, The LoRa Draguino shield for arduino. 2019. Available online: http://www.dragino.com/products/module/item/102-lora-shield.html (accessed on 12 April 2019).
- RadioHead, The RadioHead library to Support LoRa Modules. 2019. Available online: https://www.airspayce.com/mikem/arduino/RadioHead/ (accessed on 11 April 2019).
- Snips Voice Recognition Engine. 2019. Available online: https://snips.ai/technology/ (accessed on 12 April 2019).
- ASUS Tinker Boad Credit Card Computer. 2019. Available online: https://www.asus.com/us/Single-Board-Computer/Tinker-Board/ (accessed on 12 April 2019).
- TCP, Transmission Control Protocol. 2019. Available online: https://el.wikipedia.org/wiki/Transmission_Control_Protocol (accessed on 10 May 2019).
- UDP, User Datagram Protocol. 2019. Available online: https://en.wikipedia.org/wiki/User_Datagram_Protocol (accessed on 10 May 2019).
- RSSI, Received Signal Strength Indicator–RSSI. 2019. Available online: https://en.wikipedia.org/wiki/Received_signal_strength_indication. (accessed on 12 April 2019).
- WeMos D1 R2. 2019. Available online: https://wiki.wemos.cc/products:d1:d1 (accessed on 11 April 2019).
- Likert, R. A Technique for the Measurement of Attitudes. Arch. Psychol. 1932, 140, 1–55. [Google Scholar]
- Robbins, N.B.; Heiberger, R.M. Plotting Likert and Other Rating Scales. In Proceedings of the 2011 Joint Statistical Meeting, Miami Beach, FL, USA, 30 July–4 August 2011; pp. 1058–1066. [Google Scholar]









© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Loukatos, D.; Arvanitis, K.G. Extending Smart Phone Based Techniques to Provide AI Flavored Interaction with DIY Robots, over Wi-Fi and LoRa interfaces. Educ. Sci. 2019, 9, 224. https://doi.org/10.3390/educsci9030224
Loukatos D, Arvanitis KG. Extending Smart Phone Based Techniques to Provide AI Flavored Interaction with DIY Robots, over Wi-Fi and LoRa interfaces. Education Sciences. 2019; 9(3):224. https://doi.org/10.3390/educsci9030224
Chicago/Turabian StyleLoukatos, Dimitrios, and Konstantinos G. Arvanitis. 2019. "Extending Smart Phone Based Techniques to Provide AI Flavored Interaction with DIY Robots, over Wi-Fi and LoRa interfaces" Education Sciences 9, no. 3: 224. https://doi.org/10.3390/educsci9030224