
Exploring Measurement through Coding: Children’s Conceptions of a Dynamic Linear Unit with Robot Coding Toys


Abstract
:1. Introduction
Question a:
How do kindergarten-aged children express their emergent conception of a dynamic linear unit of measure during programming activities with coding toys?
Question b:
What measurement concepts and skills are challenging for kindergarten-age children to construct during programming activities with coding toys?
1.1. Early Research on Measurement and Coding
1.2. Artifact-Centric Activity Theory
2. Methods
2.1. Research Design
2.2. Participants and Setting
2.3. Procedures
2.4. Materials
2.4.1. Artifact Description and Rules: Cubetto Coding Toy
2.4.2. Cubetto Coding Tasks
2.5. Data Sources and Analysis
2.6. Limitations
3. Results
3.1. Research Question a: Expressing an Emergent Conception of a Dynamic Linear Unit of Measure
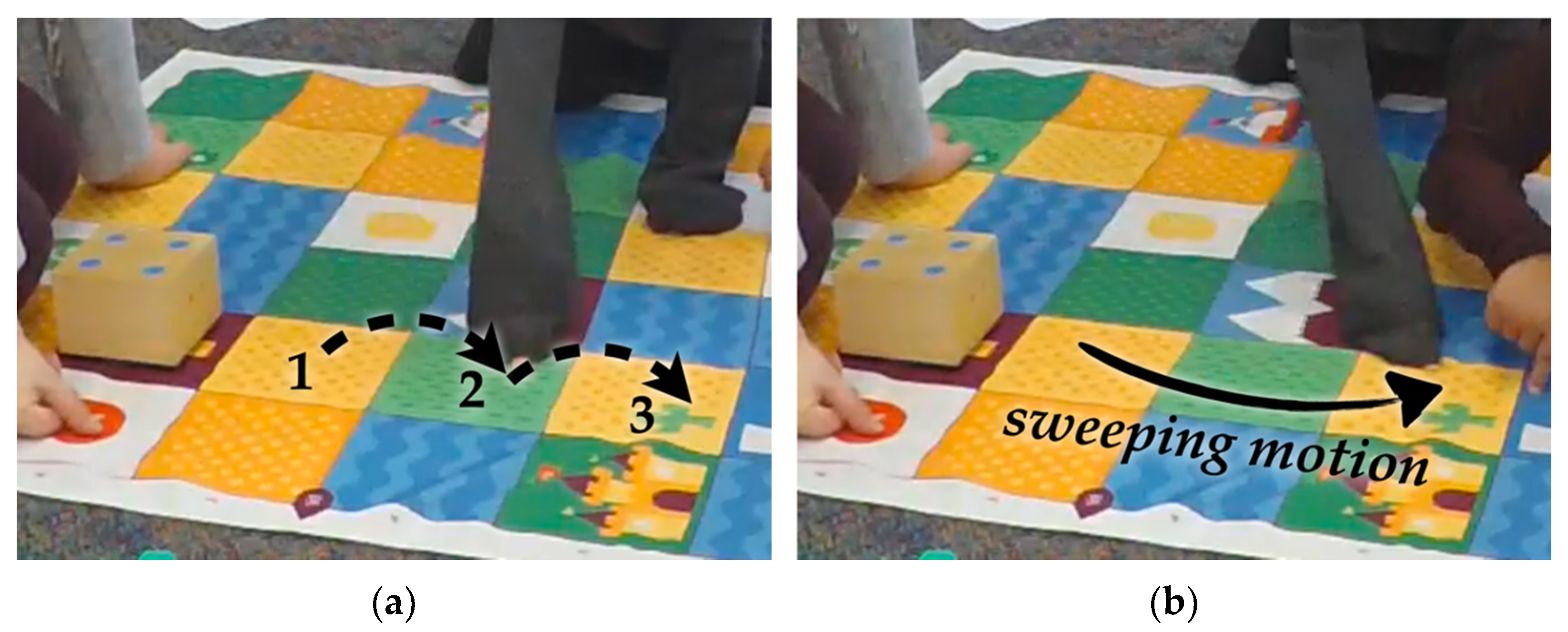
3.1.1. Expressing an Emergent Conception of a Dynamic Linear Unit of Measure: Mimicking the Artifact with Gestures
3.1.2. Expressing an Emergent Conception of a Dynamic Linear Unit of Measure: Verbal Descriptions about the Artifact’s Movements
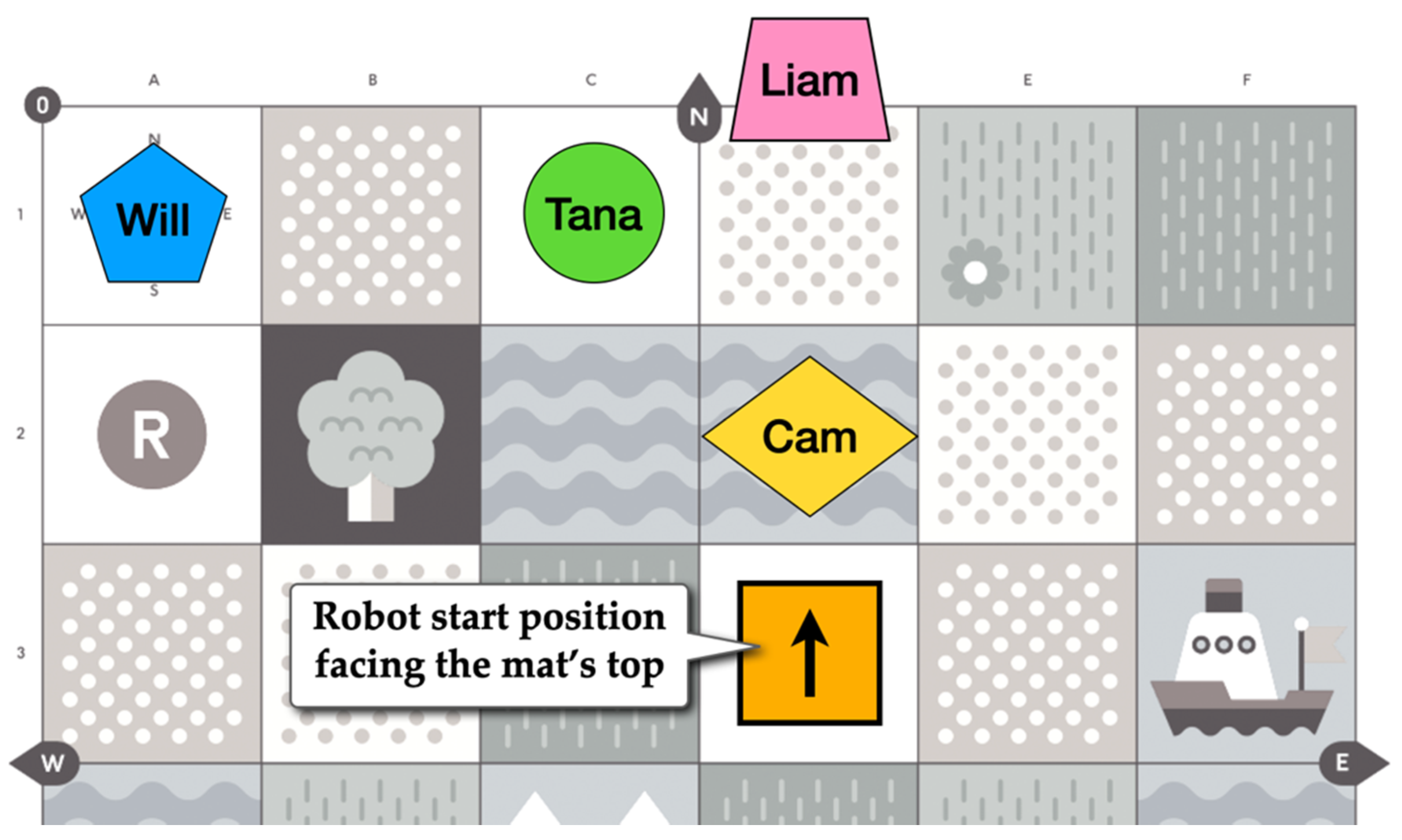
- Teacher:
- Now, which way is Cubetto looking?
- Will:
- (repeatedly taps the square in front of Cubetto, which faces the mat’s bottom edge) (see Figure 5a)
- Teacher:
- Cubetto’s looking that direction (points toward the mat’s bottom edge), right? See Cubetto’s face is here (taps Cubetto’s face)? (Figure 5a)
- Teacher:
- So, where will Cubetto go if we press the go button?
- Tana:
- (points to the blue square in front of Cubetto) (Figure 5b)
- Will:
- One space! (repeatedly slaps the square in front of Cubetto) (Figure 5c)
- Teacher:
- One space? You think it will go there?
- Liam:
- (indicates space in front of Cubetto) (Figure 5d)
- Teacher:
- You think it will go here (points to the square in front of Cubetto) and it won’t go here (points to the square behind Cubetto?) (Figure 5e)
- Tana:
- Nope.
- Cam:
- No.
- Teacher:
- Why won’t it go here? (points to the square behind Cubetto) (Figure 5e)
- Will:
- Because it’s facing (points behind Cubetto), um, like looking (taps square behind Cubetto). (Figure 5f)
- Teacher:
- The face isn’t looking there? (points to the square behind Cubetto) (Figure 5f)
- Will:
- (nods his head in affirmation)
3.1.3. Social Context: Subject-Group-Artifact Relationships for Expressing an Emergent Conception of a Dynamic Linear Unit of Measure
3.2. Research Question b: Challenges in Developing a Dynamic Linear Unit of Measurement
Subject-Group-Artifact: Will’s Experience within the Small Group
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Congdon, E.L.; Kwon, M.-K.; Levine, S.C. Learning to measure through action and gesture: Children’s prior knowledge matters. Cognition 2018, 180, 182–190. [Google Scholar] [CrossRef] [PubMed]
- Piaget, J.; Inhelder, B.; Szeminska, A. The Child’s Conception of Geometry; Basic Books: New York, NY, USA, 1960. [Google Scholar]
- Szilágyi, J.; Clements, D.H.; Sarama, J. Young children’s understandings of length measurement: Evaluating a learning trajectory. J. Res. Math. Educ. 2013, 44, 581. [Google Scholar] [CrossRef] [Green Version]
- Smith, J.P.; Barrette, J.E. Learning and teaching measurement: Coordinating quantity and number. In Compendium for Research in Mathematics Education; Cai, J., Ed.; National Council of Teachers of Mathematics: Reston, VA, USA, 2017; pp. 355–385. [Google Scholar]
- Clements, D.H.; Stephan, M. Measurement in pre-K to grade 2 mathematics. In Engaging Young Children in Mathematics: Standards for Early Childhood Mathematics Education; Clements, D.H., Sarama, J., DiBiase, A., Eds.; Lawrence Erlbaum: Mahwah, NJ, USA, 2004; pp. 299–320. [Google Scholar]
- Common Core State Standards Initiative (CCSSI). Common Core State Standards for Mathematics; National Governors Association Center for Best Practices and the Council of Chief State School Officers: Washington, DC, USA, 2010. [Google Scholar]
- Blume, G.W.; Galindo, E.; Walcott, C. Performance in measurement and geometry from the viewpoint of Principles and Standards for School Mathematics. In Results and Interpretations of the 2003 Mathematics Assessment of the National Assessment of Educational Progress; Kloosterman, P., Lester, F.K., Eds.; National Council of Teachers of Mathematics: Reston, VA, USA, 2007; pp. 95–138. [Google Scholar]
- Smith, J.P., III; Males, L.M.; Dietiker, L.C.; Lee, K.; Mosier, A. Curricular treatments of length measurement in the United States: Do they address known learning challenges? Cogn. Instr. 2013, 31, 388–433. [Google Scholar] [CrossRef] [Green Version]
- Levin, M. Conceptual and procedural knowledge during strategy construction: A complex knowledge systems perspective. Cogn. Instr. 2018, 36, 247–278. [Google Scholar] [CrossRef]
- Rittle-Johnson, B.; Schneider, M. Developing conceptual and procedural knowledge of mathematics. In The Oxford Handbook of Numerical Cognition; Cohen Kadosh, R., Dowker, A., Eds.; Oxford University Press: Oxford, UK, 2014. [Google Scholar] [CrossRef]
- Star, J.R. Foregrounding procedural knowledge. J. Res. Math. Educ. 2007, 38, 132–135. [Google Scholar]
- Congdon, E.L.; Levine, S.C. Making measurement mistakes: How actions and gestures can rectify common student misconceptions. In Supporting Spatial Thinking to Enhance STEM Learning; Kolvoord, B., Ed.; Symposium Conducted at the Annual Meeting of the American Educational Research Association: San Antonio, TX, USA, 2017. [Google Scholar]
- Angeli, C.; Valanides, N. Developing Young Children’s Computational Thinking with Educational Robotics: An Interaction Effect between Gender and Scaffolding Strategy. Comput. Hum. Behav. 2020, 105, 105954. [Google Scholar] [CrossRef]
- Moore, T.J.; Brophy, S.P.; Tank, K.M.; Lopez, R.D.; Johnston, A.C.; Hynes, M.M.; Gajdzik, E. Multiple Representations in Computational Thinking Tasks: A Clinical Study of Second-Grade Students. J. Sci. Educ. Technol. 2020, 29, 19–34. [Google Scholar] [CrossRef]
- Palmér, H. Programming in Preschool—With a Focus on Learning Mathematics. Int. Res. Early Child. Educ. 2017, 8, 75–87. [Google Scholar]
- Rijke, W.J.; Bollen, L.; Eysink, T.H.S.; Tolboom, J.L.J. Computational Thinking in Primary School: An Examination of Abstraction and Decomposition in Different Age Groups. Inform. Educ. 2018, 17, 77–92. [Google Scholar] [CrossRef]
- Kazakoff, E.R.; Sullivan, A.; Bers, M.U. The Effect of a Classroom-Based Intensive Robotics and Programming Workshop on Sequencing Ability in Early Childhood. Early Child. Educ. J. 2013, 41, 245–255. [Google Scholar] [CrossRef]
- Nam, K.W.; Kim, H.J.; Lee, S. Connecting Plans to Action: The Effects of a Card-Coded Robotics Curriculum and Activities on Korean Kindergartners. Asia-Pac. Educ. Res. 2019, 28, 387–397. [Google Scholar] [CrossRef]
- Saxena, A.; Lo, C.K.; Hew, K.F.; Wong, G.K.W. Designing Unplugged and Plugged Activities to Cultivate Computational Thinking: An Exploratory Study in Early Childhood Education. Asia-Pac. Educ. Res. 2020, 29, 55–66. [Google Scholar] [CrossRef]
- Strawhacker, A.; Bers, M.U. What They Learn When They Learn Coding: Investigating Cognitive Domains and Computer Programming Knowledge in Young Children. Educ. Technol. Res. Dev. 2019, 67, 541–575. [Google Scholar] [CrossRef]
- Città, G.; Gentile, M.; Allegra, M.; Arrigo, M.; Conti, D.; Ottaviano, S.; Reale, F.; Sciortino, M. The Effects of Mental Rotation on Computational Thinking. Comput. Educ. 2019, 141, 103613. [Google Scholar] [CrossRef]
- Dickes, A.C.; Farris, A.V.; Sengupta, P. Sociomathematical Norms for Integrating Coding and Modeling with Elementary Science: A Dialogical Approach. J. Sci. Educ. Technol. 2020, 29, 35–52. [Google Scholar] [CrossRef]
- Miller, J. STEM Education in the Primary Years to Support Mathematical Thinking: Using Coding to Identify Mathematical Structures and Patterns. ZDM Math. Educ. 2019, 51, 915–927. [Google Scholar] [CrossRef]
- Shumway, J.F.; Welch, L.E.; Kozlowski, J.S.; Clarke-Midura, J.; Lee, V.R. Kindergarten Students’ Mathematics Knowledge at Work: The Mathematics for Programming Robot Toys. Math. Think. Learn. 2021, 1–29. [Google Scholar] [CrossRef]
- Papert, S. Mindstorms: Children, Computers, and Powerful Ideas; Basic Books: New York, NY, USA, 1980. [Google Scholar]
- Clements, D.H.; Battista, M.T.; Sarama, J.; Swaminathan, S.; McMillen, S. Students’ development of length concepts in a logo-based unit on geometric paths. J. Res. Math. Educ. 1997, 28, 70–95. [Google Scholar] [CrossRef] [Green Version]
- Campbell, P.F.; Fein, G.G.; Schwartz, S.S. The effects of Logo experience on first-grade children’s ability to estimate distance. J. Educ. Comput. Res. 1991, 7, 331–349. [Google Scholar] [CrossRef]
- Clements, D.H. Teaching length measurement: Research challenges. Sch. Sci. Math. 1999, 99, 5–11. [Google Scholar] [CrossRef]
- Solomon, T.L.; Vasilyeva, M.; Huttenlocher, J.; Levine, S.C. Minding the gap: Children’s difficulty conceptualizing spatial intervals as linear measurement units. Dev. Psychol. 2015, 51, 1564–1573. [Google Scholar] [CrossRef] [PubMed]
- Ladel, S.; Kortenkamp, U. Artifact-Centric Activity Theory: A Framework for the Analysis of the Design and Use of Virtual Manipulatives. In International Perspectives on Teaching and Learning Mathematics with Virtual Manipulatives; Moyer-Packenham, P.S., Ed.; Springer: Cham, Switzerland, 2016; Volume 7, pp. 25–40. [Google Scholar]
- Bullock, E.P.; Roxburgh, A.L.; Moyer-Packenham, P.S.; Bektas, E.; Webster, J.S.; Bullock, K.A. Connecting the Dots: Understanding the Interrelated Impacts of Type, Quality and Children’s Awareness of Design Features and the Mathematics Content Learning Goals in Digital Math Games and Related Learning Outcomes. J. Comput. Assist. Learn. 2021, 37, 557–586. [Google Scholar] [CrossRef]
- Adkins, A.B. A Case Study: Number Apps in Preschool. Ph.D. Dissertation, University of Nevada, Las Vegas, NV, USA, December 2018. [Google Scholar] [CrossRef]
- Moyer-Packenham, P.S.; Westenskow, A. Effects of virtual manipulatives on student achievement and mathematics learning. Int. J. Virtual Pers. Learn. Environ. 2013, 4, 35–50. [Google Scholar] [CrossRef]
- Ladel, S.; Kortenkamp, U. An Activity-Theoretic Approach to Multi-Touch Tools in Early Mathematics Learning. Int. J. Technol. Math. Educ. 2011, 20, 3–8. [Google Scholar]
- Goldin-Meadow, S. How gestures promotes learning throughout childhood. Child Dev. Perspect. 2009, 3, 106–111. [Google Scholar] [CrossRef] [Green Version]
- Segal, A. Do Gestural Interfaces Promote Thinking? Embodied Interaction: Congruent Gestures and Direct Touch Promote Performance in Math. Ph.D. Thesis, Columbia University, New York, NY, USA, 2011. [Google Scholar]
- Alibali, M.W.; Nathan, M.J. Embodiment in Mathematics Teaching and Learning: Evidence from Learners’ and Teachers’ Gestures. J. Learn. Sci. 2012, 21, 247–286. [Google Scholar] [CrossRef]
- Goldin-Meadow, S.; Alibali, M.W. Gesture’s Role in Speaking, Learning, and Creating Language. Annu. Rev. Psychol. 2013, 64, 257–283. [Google Scholar] [CrossRef] [Green Version]
- Cook, S.W.; Fenn, K.M. The Function of Gesture in Learning and Memory. In Why Gesture?: How the Hands Function in Speaking, Thinking and Communicating; Church, R.B., Alibali, M.W., Kelly, S.D., Eds.; Gesture Studies; John Benjamins Publishing Company: Amsterdam, The Netherlands, 2017; Volume 7. [Google Scholar] [CrossRef]
- Walkington, C.; Chelule, G.; Woods, D.; Nathan, M.J. Collaborative Gesture as a Case of Extended Mathematical Cognition. J. Math. Behav. 2019, 55, 100683. [Google Scholar] [CrossRef]
- Clarke-Midura, J.; Silvis, D.; Shumway, J.F.; Lee, V.R.; Kozlowski, J.S. Developing a Kindergarten Computational Thinking Assessment Using Evidence-Centered Design: The Case of Algorithmic Thinking. Comput. Sci. Educ. 2021, 31, 117–140. [Google Scholar] [CrossRef]
- Shute, V.J.; Sun, C.; Asbell-Clarke, J. Demystifying Computational Thinking. Educ. Res. Rev. 2017, 22, 142–158. [Google Scholar] [CrossRef]
- Yin, R.K. Case Study Research and Applications: Design and Methods, 6th ed.; SAGE: Los Angeles, CA, USA, 2018. [Google Scholar]
- Welch, L.E.; Shumway, J.F.; Clarke-Midura, J.; Lee, V.R. Kindergarteners’ Conceptions of a Dynamic Linear Unit with Robot Toys. [Paper Roundtable session]. In Proceedings of the Annual Meeting of the American Educational Research Association, Virtual Platforms and Online, 8–12 April 2021. [Google Scholar]
- Sandoval, W. Conjecture Mapping: An Approach to Systemic Educational Design Research. Syst. Educ. Des. Res. 2014, 23, 18–36. [Google Scholar] [CrossRef]
- Saldaña, J. The Coding Manual for Qualitative Researchers, 4th ed.; SAGE: Los Angeles, CA, USA, 2021. [Google Scholar]
- Ladel, S.; Kortenkamp, U. Number Concepts—Processes of Internalization and Externalization by the Use of Multi-Touch Technology. In Early Mathematics Learning; Kortenkamp, U., Brandt, B., Benz, C., Krummheuer, G., Ladel, S., Vogel, R., Eds.; Springer: New York, NY, USA, 2014. [Google Scholar] [CrossRef]
- Moyer-Packenham, P.S.; Lommatsch, C.W.; Litster, K.; Ashby, J.; Bullock, E.K.; Roxburgh, A.L.; Shumway, J.F.; Speed, E.; Covington, B.; Hartmann, C. How design features in digital math games support learning and mathematics connections. Comput. Hum. Behav. 2019, 91, 316–332. [Google Scholar] [CrossRef]
- Clements, D.H.; Sarama, J. Learning and Teaching Early Math: The Learning Trajectories Approach, 2nd ed.; Routledge: Oxford, UK, 2014. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Robot Mouse | Code-a-Pillar | Botley | Cubetto | |||||
|---|---|---|---|---|---|---|---|---|
| Robot |  |  |  |  | ||||
| Robot Codes and Movements |  | forward |  | forward |  | forward |  | forward |
 | rotate right 90° |  | turn right |  | rotate right 90° |  | rotate right 90° | |
 | rotate left 90° |  | turn left |  | rotate left 90° |  | rotate left 90° | |
 | backward |  | backward |  | backward | |||
| Category | Description | Example |
|---|---|---|
| Location of choice (preconception L) | The robot will travel to any location. | When asked where the green tile would send the robot, Liam indicated that the robot would stop on the compass rose (see Figure 6, Will). |
| Green space (preconception G) | The robot will travel to a green-colored square. | When asked where the green tile will send the robot, a child exclaimed “to the green!” and slapped an incorrect green square on the mat. |
| Forward travel (preconception F) | The robot will travel forward until stopped by an outside force. | When asked what the green tile will tell the robot to do, one child predicted: “it will crash into the programming board.” The programming board was a few feet in front of the robot. |
| Constructed Conception (C) | The length of one dynamically iterable unit of movement. | When asked where the green tile would make the robot go, a student replied: “to the space in front of it.” |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Welch, L.E.; Shumway, J.F.; Clarke-Midura, J.; Lee, V.R. Exploring Measurement through Coding: Children’s Conceptions of a Dynamic Linear Unit with Robot Coding Toys. Educ. Sci. 2022, 12, 143. https://doi.org/10.3390/educsci12020143
Welch LE, Shumway JF, Clarke-Midura J, Lee VR. Exploring Measurement through Coding: Children’s Conceptions of a Dynamic Linear Unit with Robot Coding Toys. Education Sciences. 2022; 12(2):143. https://doi.org/10.3390/educsci12020143
Chicago/Turabian StyleWelch, Lise E., Jessica F. Shumway, Jody Clarke-Midura, and Victor R. Lee. 2022. "Exploring Measurement through Coding: Children’s Conceptions of a Dynamic Linear Unit with Robot Coding Toys" Education Sciences 12, no. 2: 143. https://doi.org/10.3390/educsci12020143