
Robot Operations for Pine Tree Resin Collection


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
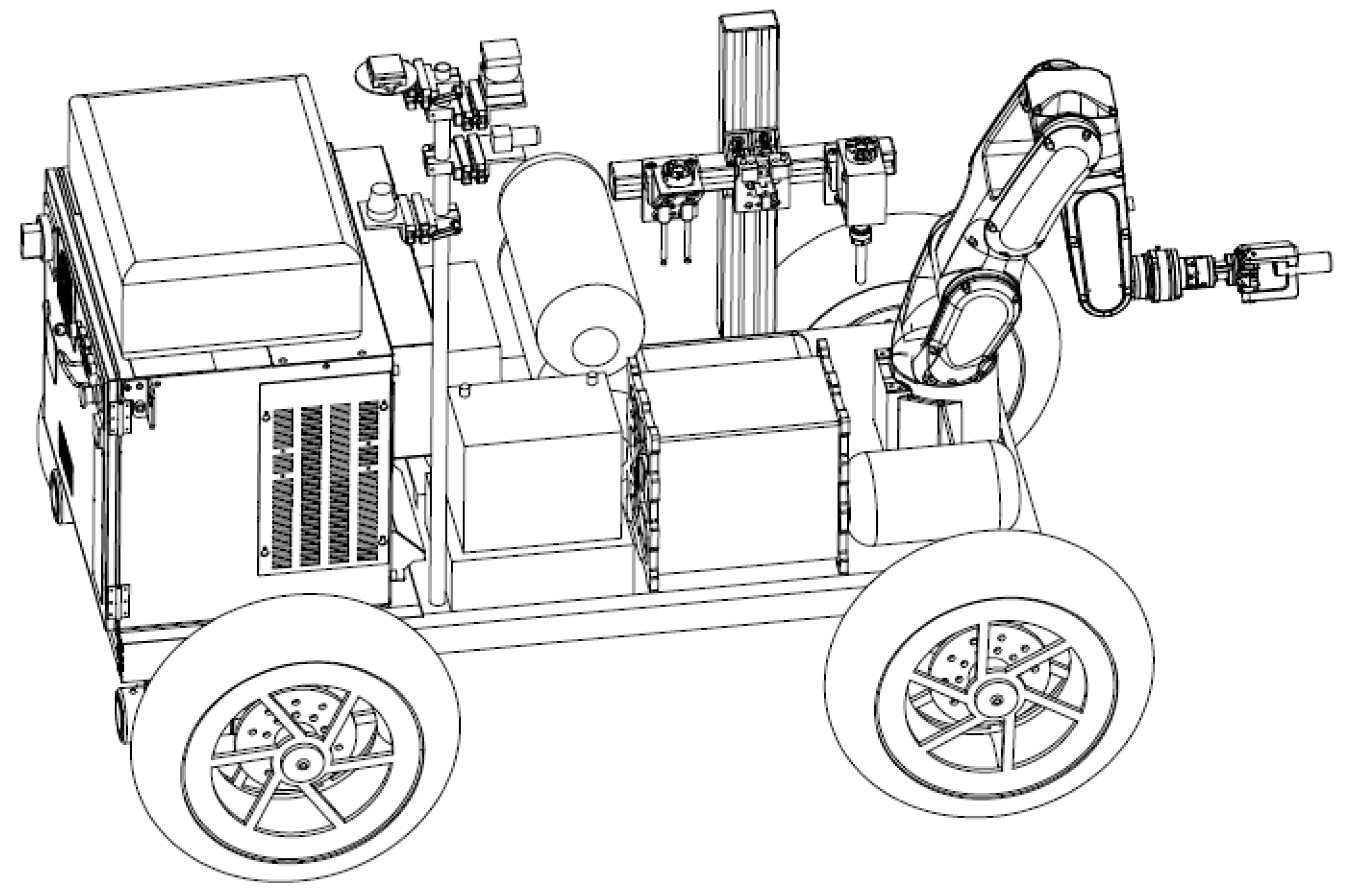
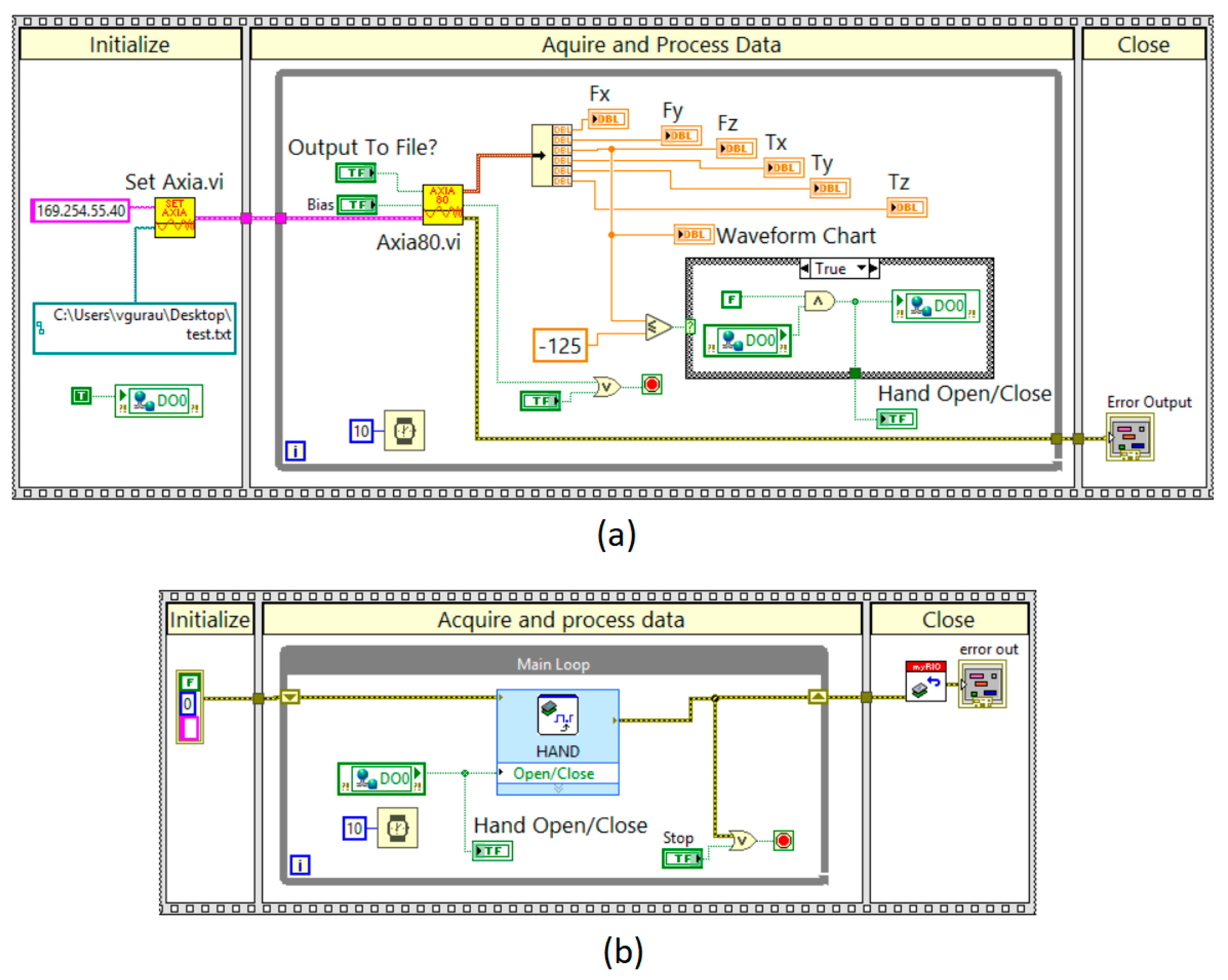
2.1. Experimental System
2.2. Challenges and Strategies to Address Them
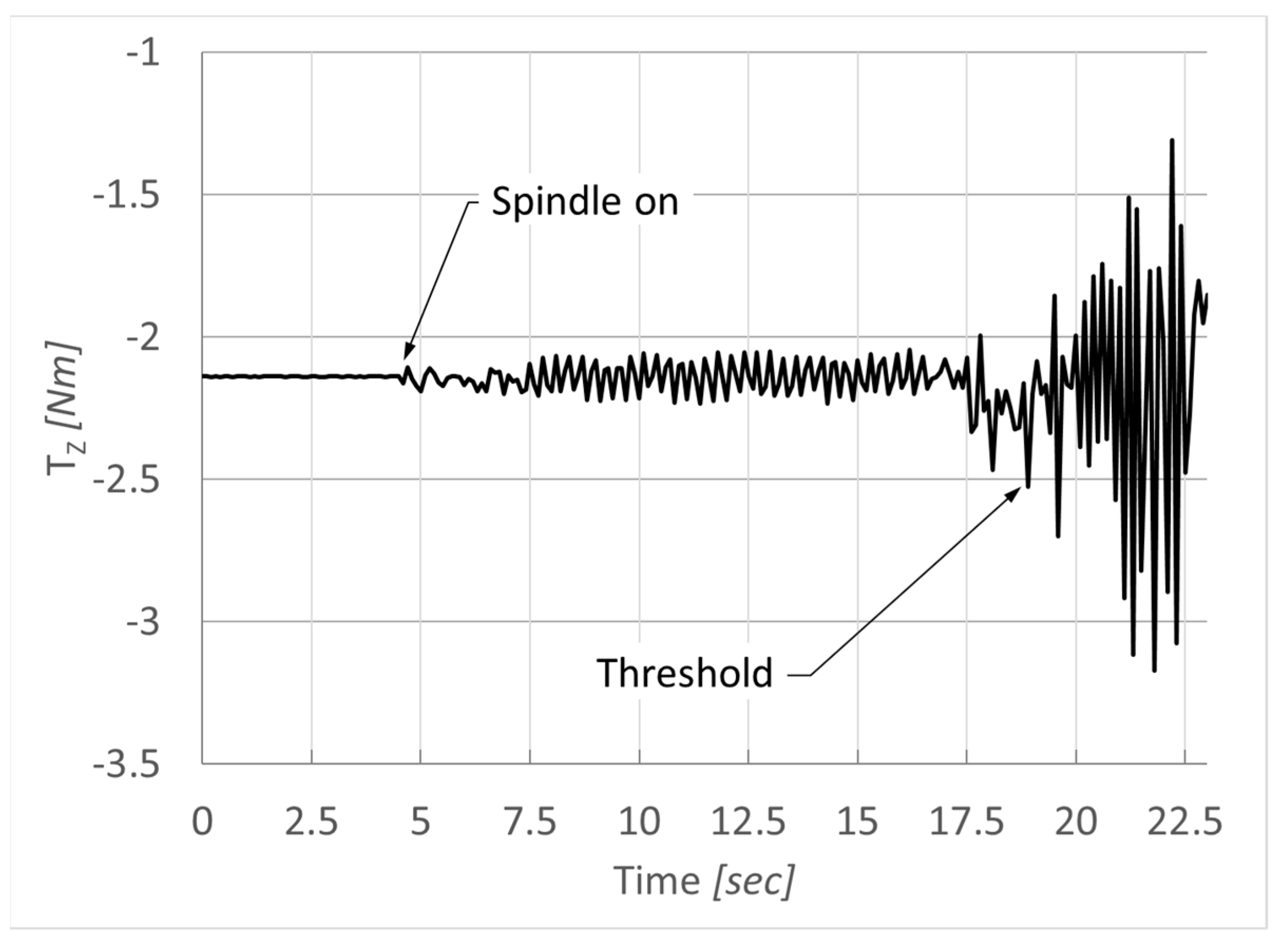
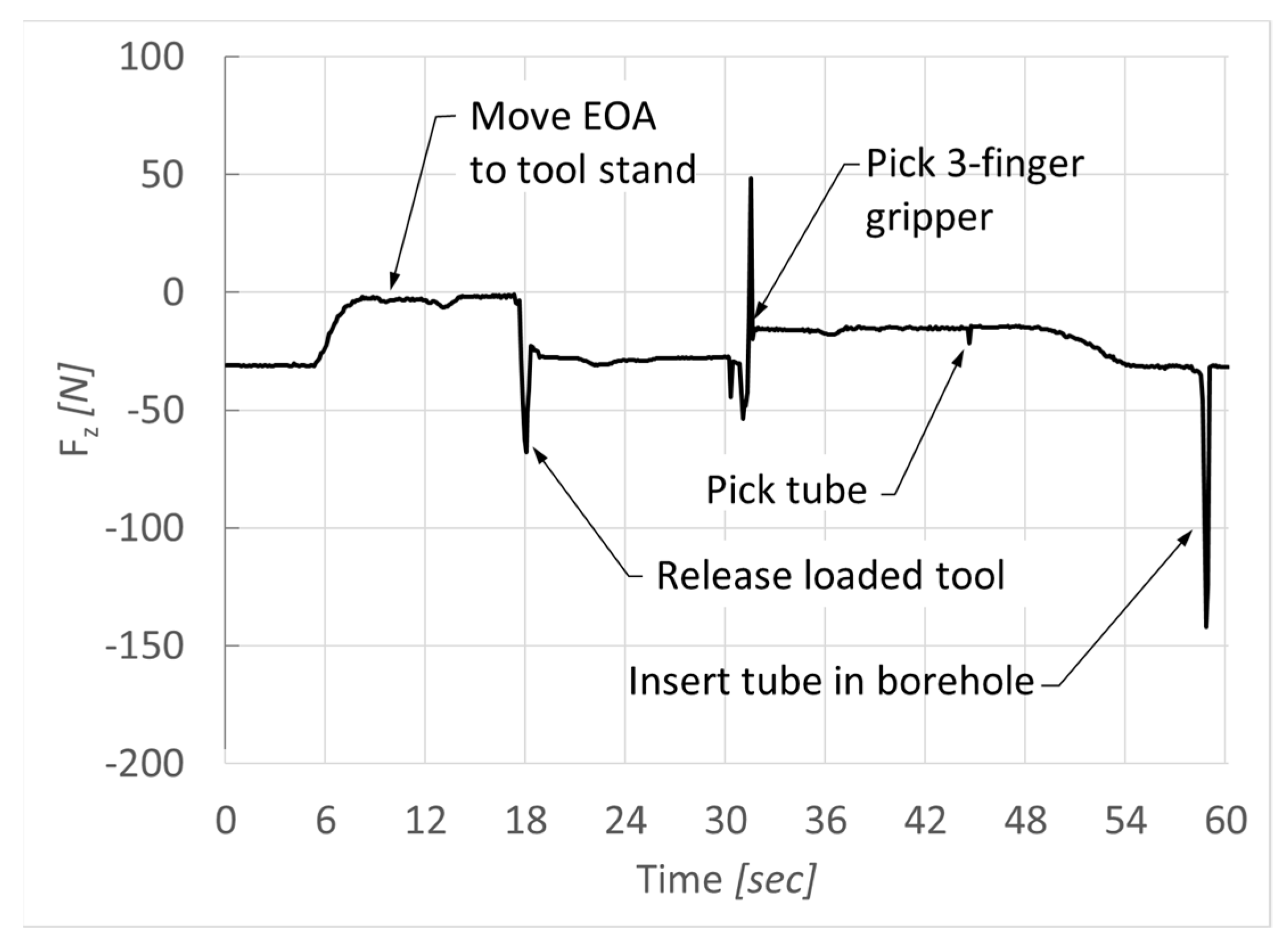
3. Results and Discussion
4. Conclusions
5. Patents
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

Appendix B

References
- Gurau, V.; Busby, L. Autonomous Robotic Forest Rover for Automated Resin Collection. U.S. Patent Application No. 17/331,124, 26 May 2021. [Google Scholar]
- Visser, R.; Obi, O.F. Automation and Robotics in Forest Harvesting Operations: Identifying Near-Term Opportunities. Croat. J. For. Eng. 2021, 42, 12–24. [Google Scholar] [CrossRef]
- Parker, R.; Bayne, K.; Clinton, P.W. Robotics in Forestry. N. Z. J. For. 2016, 60, 8–14. [Google Scholar]
- Fue, K.G.; Porter, W.M.; Barnes, E.M.; Rains, G.C. An Extensive Review of Mobile Agricultural Robotics for Field Operations: Focus on Cotton Harvesting. AgriEnginnering 2020, 2, 150–174. [Google Scholar] [CrossRef] [Green Version]
- Underwood, J.; Wendel, A.; Schofield, B.; McMurray, L.; Kimber, R. Efficient in-field plant phenomics for row-crops with an autonomous ground vehicle. J. Field Robot. 2017, 34, 1061–1083. [Google Scholar] [CrossRef]
- Kurita, H.; Iida, M.; Cho, W.; Suguri, M. Rice Autonomous Harvesting: Operation Framework. J. Field Robot. 2017, 34, 1084–1099. [Google Scholar] [CrossRef]
- Botterill, T.; Paulin, S.; Green, R.; Williams, S.; Lin, J.; Saxton, V.; Mills, S.; Chen, X.; Corbett-Davies, S. A Robot System for Pruning Grape Vines. J. Field Robot. 2017, 34, 1100–1122. [Google Scholar] [CrossRef]
- Bac, C.W.; Hemming, J.; van Tuijl, B.A.J.; Barth, R.; Wais, E.; van Henten, E.J. Performance Evaluation of a Harvesting Robot for Sweet Pepper. J. Field Robot. 2017, 34, 1123–1139. [Google Scholar] [CrossRef]
- Bawden, O.; Kulk, J.; Russell, R.; McCool, C.; English, A.; Dayoub, F.; Lehnert, C.; Perez, T. Robot for weed species plant-specific management. J. Field Robot. 2017, 34, 1179–1199. [Google Scholar] [CrossRef]
- Cunningham, A. Chapter 1: Pine resin tapping techniques used around the world. In Pine Resin: Biology, Chemistry and Applications; Fett-Neto, A.G., Rodrigues-Corrêa, K.C.d.S., Eds.; Research Signpost: Kerala, India, 2012; ISBN 978-81-308-0493-4. [Google Scholar]
- Lauture, M.J. Reinvigorating Oleoresin Collection in the Southeast USA: Evaluation of Chemical Inducers, Stand Management, Tree Characteristics, and Genetics. Doctoral Dissertation, University of Florida, Gainesville, FL, USA, 2017. [Google Scholar]
- Rodrigues-Corrêa, K.C.d.S.; de Lima, J.C.; Fett-Neto, A.G. Oleoresins from pine: Production and industrial uses. In Natural Products; Ramawat, K.G., Merillon, J.M., Eds.; Springer: Berlin, Germany, 2013; ISBN 978-3-642-22145-3. [Google Scholar]
- Hadiyane, A.; Sulistyawati, E.; Asharina, W.P.; Dungani, R. A Study on Production of Resin from Pinus merkusii Jungh. Et De Vriese in the Bosscha Observatory Area, West Java-Indonesia. Asian J. Plant Sci. 2015, 14, 89–93. [Google Scholar] [CrossRef] [Green Version]
- Busby, L.K. A Dissolvable Collection System for Turpentine Production. International Patent Application No. WO 2018/035490 Al, 2 February 2018. [Google Scholar]
- Rubber Tapping Robots Put to Trial Operation. Available online: https://www.youtube.com/watch?v=heSUQXHnIho (accessed on 1 August 2021).
- FANUC America Corporation. Handling Tool Operations & Programming Student Manual; Fanuc Robotics: Rochester, MI, USA, 2016. [Google Scholar]
- Chen, C.P.; Huang, Z. Blasting Hole Recognition and Location Based on Machine Vision. Appl. Mech. Mater. 2015, 733, 718–721. [Google Scholar] [CrossRef]
- Davies, E.R. Chapter 13: Hole detection. In Machine Vision: Theory, Algorithms, Practicalities, 3rd ed.; Elsevier: Boston, MA, USA, 2004; ISBN 9780122060939. [Google Scholar]
- Yachida, M.; Tsuji, S. A Versatile Machine Vision System for Complex Industrial Parts. IEEE Trans. Comput. 1977, C-26, 882–894. [Google Scholar] [CrossRef]
- Davits, E.R.; Barker, S.P. An analysis of hole detection schemes. In Proceedings of the British Machine Conference; Sleigh, A., Ed.; BMVA Press: Surrey, UK, 1990; pp. 51.1–51.6. [Google Scholar] [CrossRef] [Green Version]
- Rice, J.J.; Schimmels, J.M. Passive Compliance Control of Redundant Serial Manipulators. J. Mech. Robot. 2018, 10, 044507. [Google Scholar] [CrossRef] [Green Version]
- Williams, M.; Tignor, K.; Sigler, L.; Rajagopal, C.; Gurau, V. Robotic Arm for Automated Assembly of Proton Exchange Membrane Fuel Cell Stacks. J. Fuel Cell Sci. Technol. 2014, 11, 054501. [Google Scholar] [CrossRef]
- Gurau, V.; Armstrong-Koch, T. Further Improvements of an End-Effector for Robotic Assembly of Polymer Electrolyte Membrane Fuel Cells. Energies 2015, 8, 9452–9463. [Google Scholar] [CrossRef] [Green Version]
- Wang, W.; Loh, R.N.K.; Gu, E.Y. Passive Compliance Versus Active Compliance in Robot-Based Automated Assembly Systems. Ind. Robot. 1998, 25, 48–57. [Google Scholar] [CrossRef]
- Gurau, V.; Fowler, D.; Cox, D. Chapter 3: Robotic technologies for proton exchange membrane fuel cell assembly. In Proton Exchange Membrane Fuel Cell; Taner, T., Ed.; IntechOpen: London, UK, 2018. [Google Scholar] [CrossRef] [Green Version]
- Ang, M.H., Jr.; Wang, W.; Loh, R.N.K.; Low, T.S. Passive Compliance from Robot Limbs and its Usefulness in Robotic Automation. J. Intell. Robot. Syst. 1997, 20, 1–21. [Google Scholar] [CrossRef]
- Fowler, D.; Gurau, V.; Cox, D. Bridging the Gap between Automated Manufacturing of Fuel Cell Components and Robotic Assembly of Fuel Cell Stacks. Energies 2019, 12, 3604. [Google Scholar] [CrossRef] [Green Version]











Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gurau, V.; Ragland, B.; Cox, D.; Michaud, A.; Busby, L. Robot Operations for Pine Tree Resin Collection. Technologies 2021, 9, 79. https://doi.org/10.3390/technologies9040079
Gurau V, Ragland B, Cox D, Michaud A, Busby L. Robot Operations for Pine Tree Resin Collection. Technologies. 2021; 9(4):79. https://doi.org/10.3390/technologies9040079
Chicago/Turabian StyleGurau, Vladimir, Beau Ragland, Daniel Cox, Andrew Michaud, and Lloyd Busby. 2021. "Robot Operations for Pine Tree Resin Collection" Technologies 9, no. 4: 79. https://doi.org/10.3390/technologies9040079