
Traffic Flow Prediction for Smart Traffic Lights Using Machine Learning Algorithms

 , , ,
, , ,  , ,
, ,  and
and 
Abstract
:1. Introduction
2. Materials and Methods
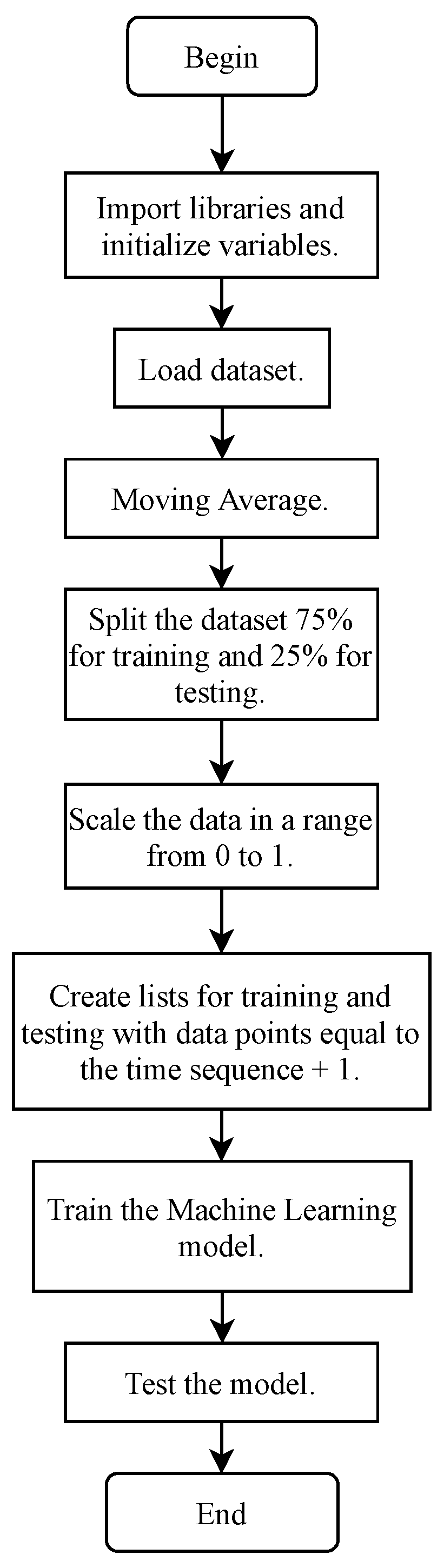
2.1. Data Preprocessing
2.2. Recurrent Neural Networks
2.2.1. RNNs Design
2.2.2. RNNs Training
2.3. Machine Learning Methods
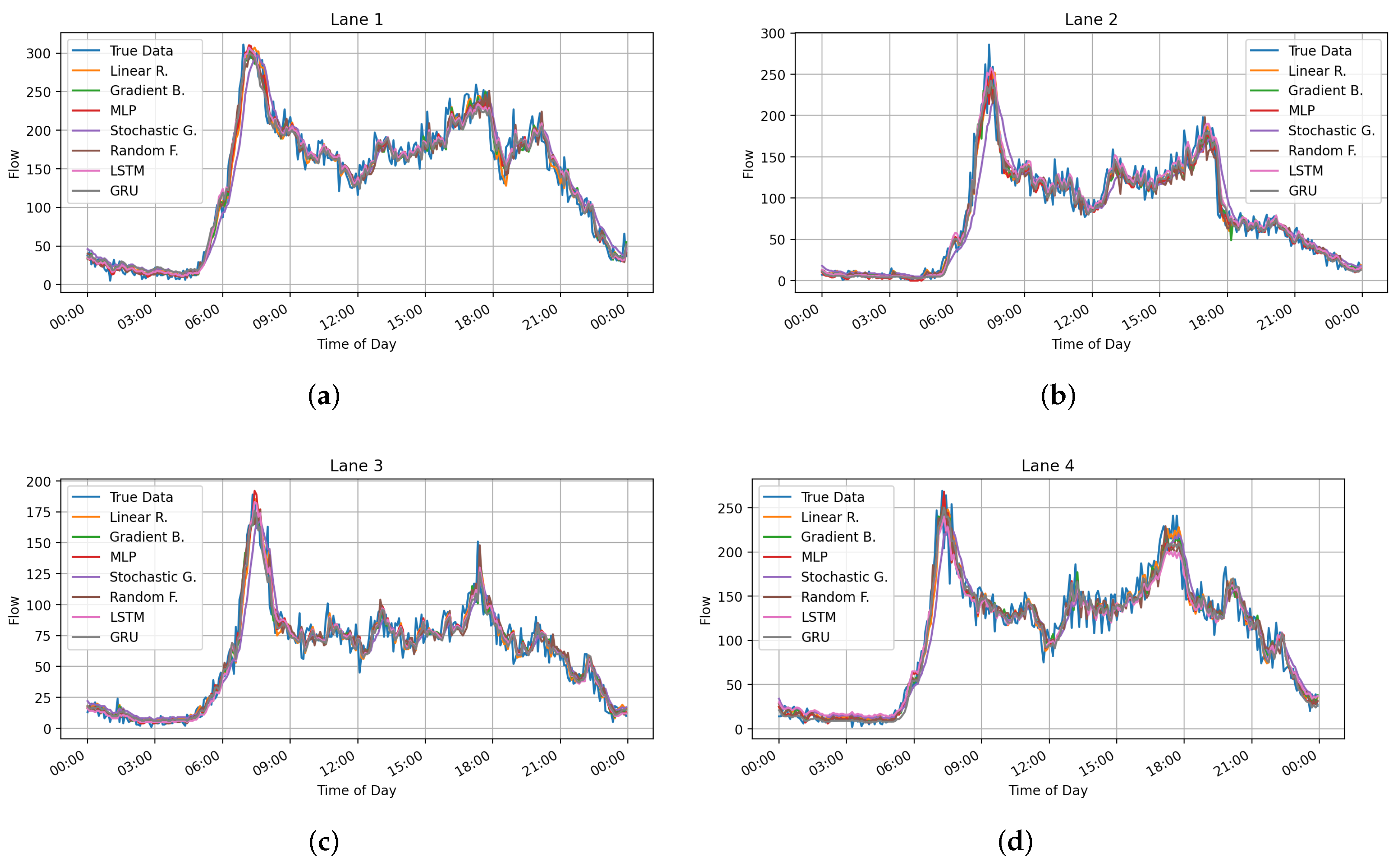
3. Results
4. Proposed Usage Scenario
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chen, C.; Liu, B.; Wan, S.; Qiao, P.; Pei, Q. An Edge Traffic Flow Detection Scheme Based on Deep Learning in an Intelligent Transportation System. IEEE Trans. Intell. Transp. Syst. 2021, 22, 1840–1852. [Google Scholar] [CrossRef]
- Ahmed, M.; Masood, S.; Ahmad, M.; El-Latif, A.A.A. Intelligent Driver Drowsiness Detection for Traffic Safety Based on Multi CNN Deep Model and Facial Subsampling. IEEE Trans. Intell. Transp. Syst. 2021, 1–10. [Google Scholar] [CrossRef]
- Boukerche, A.; Wang, J. A performance modeling and analysis of a novel vehicular traffic flow prediction system using a hybrid machine learning-based model. Ad. Hoc. Netw. 2020, 106, 102224. [Google Scholar] [CrossRef]
- Meena, G.; Sharma, D.; Mahrishi, M. Traffic Prediction for Intelligent Transportation System using Machine Learning. In Proceedings of the 2020 3rd International Conference on Emerging Technologies in Computer Engineering: Machine Learning and Internet of Things (ICETCE), Jaipur, India, 7–8 February 2020; pp. 145–148. [Google Scholar] [CrossRef]
- Yuan, H.; Li, G. A Survey of Traffic Prediction: From Spatio-Temporal Data to Intelligent Transportation. Data Sci. Eng. 2021, 6, 63–85. [Google Scholar] [CrossRef]
- Jingyao, W.; Manas, R.P.; Nallappan, G. Machine learning-based human-robot interaction in ITS. Inf. Process. Manag. 2022, 59, 102750. [Google Scholar] [CrossRef]
- Li, Y.; Shahabi, C. A brief overview of machine learning methods for short-term traffic forecasting and future directions. Sigspatial Spec. 2018, 10, 3–9. [Google Scholar] [CrossRef]
- Boukerche, A.; Wang, J. Machine Learning-based traffic prediction models for Intelligent Transportation Systems. Comput. Netw. 2020, 181, 107530. [Google Scholar] [CrossRef]
- Boukerche, A.; Tao, Y.; Sun, P. Artificial intelligence-based vehicular traffic flow prediction methods for supporting intelligent transportation systems. Comput. Netw. 2020, 182, 107484. [Google Scholar] [CrossRef]
- Ahsan, M.M.; Mahmud, M.A.P.; Saha, P.K.; Gupta, K.D.; Siddique, Z. Effect of Data Scaling Methods on Machine Learning Algorithms and Model Performance. Technologies 2021, 9, 52. [Google Scholar] [CrossRef]
- George, S.; Santra, A.K. Traffic Prediction Using Multifaceted Techniques: A Survey. Wirel. Pers. Commun. 2020, 115, 1047–1106. [Google Scholar] [CrossRef]
- Alam, I.; Farid, D.M.; Rossetti, R.J.F. The Prediction of Traffic Flow with Regression Analysis. In Emerging Technologies in Data Mining and Information Security; Abraham, A., Dutta, P., Mandal, J.K., Bhattacharya, A., Dutta, S., Eds.; Springer: Singapore, 2019; pp. 661–671. [Google Scholar]
- Li, J.; Boonaert, J.; Doniec, A.; Lozenguez, G. Multi-models machine learning methods for traffic flow estimation from Floating Car Data. Transp. Res. Part C: Emerg. Technol. 2021, 132, 103389. [Google Scholar] [CrossRef]
- Haghighat, A.K.; Ravichandra-Mouli, V.; Chakraborty, P.; Esfandiari, Y.; Arabi, S.; Sharma, A. Applications of Deep Learning in Intelligent Transportation Systems. J. Big Data Anal. Transp. 2020, 2, 115–145. [Google Scholar] [CrossRef]
- Ferreira, Y.; Frank, L.; Julio, E.; Henrique, F.; Dembogurski, B.; Silva, E. Applying a Multilayer Perceptron for Traffic Flow Prediction to Empower a Smart Ecosystem. In Computational Science and Its Applications; Springer: Cham, Switzerland, 2019; pp. 633–648. [Google Scholar] [CrossRef]
- Hosseini, S.H.; Moshiri, B.; Rahimi-Kian, A.; Araabi, B.N. Traffic flow prediction using mi algorithm and considering noisy and data loss conditions: An application to minnesota traffic flow prediction. Promet Traffic Traffico 2014, 26, 393–403. [Google Scholar] [CrossRef]
- Jiang, C.Y.; Hu, X.M.; Chen, W.N. An Urban Traffic Signal Control System Based on Traffic Flow Prediction. In Proceedings of the 2021 13th International Conference on Advanced Computational Intelligence (ICACI), Wanzhou, China, 14–16 May 2021; pp. 259–265. [Google Scholar] [CrossRef]
- Chen, Y.R.; Chen, K.P.; Hsiung, P.A. Dynamic traffic light optimization and control system using model-predictive control method. In Proceedings of the IEEE Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1–4 November 2016; pp. 2366–2371. [Google Scholar] [CrossRef]
- Wang, R. Optimal method of intelligent traffic signal light timing based on genetic neural network. Adv. Transp. Stud. 2021, 1, 3–12. [Google Scholar] [CrossRef]
- Lawe, S.; Wang, R. Optimization of Traffic Signals Using Deep Learning Neural Networks BT—AI 2016: Advances in Artificial Intelligence. In AI 2016: Advances in Artificial Intelligence; Kang, B.H., Bai, Q., Eds.; Springer: Cham, Switzerland, 2016; pp. 403–415. [Google Scholar] [CrossRef]
- Chen, Q.; Song, Y.; Zhao, J. Short-term traffic flow prediction based on improved wavelet neural network. Neural Comput. Appl. 2021, 33, 8181–8190. [Google Scholar] [CrossRef]
- Gadze, J.D.; Bamfo-Asante, A.A.; Agyemang, J.O.; Nunoo-Mensah, H.; Opare, K.A.B. An Investigation into the Application of Deep Learning in the Detection and Mitigation of DDOS Attack on SDN Controllers. Technologies 2021, 9, 14. [Google Scholar] [CrossRef]
- Zhang, Y.; Xin, D.R. Short-term traffic flow prediction model based on deep learning regression algorithm. Int. J. Comput. Sci. Math. 2021, 14, 155–166. [Google Scholar] [CrossRef]
- Lei, H.; Yi-Shao, H. Short-term traffic flow prediction of road network based on deep learning. IET Intell. Transp. Syst. 2020, 14, 495–503. [Google Scholar] [CrossRef]
- Fu, R.; Zhang, Z.; Li, L. Using LSTM and GRU neural network methods for traffic flow prediction. In Proceedings of the 2016 31st Youth Academic Annual Conference of Chinese Association of Automation, YAC 2016, Wuhan, China, 11–13 November 2016; pp. 324–328. [Google Scholar] [CrossRef]
- Hussain, B.; Afzal, M.K.; Ahmad, S.; Mostafa, A.M. Intelligent Traffic Flow Prediction Using Optimized GRU Model. IEEE Access 2021, 9, 100736–100746. [Google Scholar] [CrossRef]
- Lv, Y.; Duan, Y.; Kang, W.; Li, Z.; Wang, F.Y. Traffic Flow Prediction with Big Data: A Deep Learning Approach. IEEE Trans. Intell. Transp. Syst. 2015, 16, 865–873. [Google Scholar] [CrossRef]
- Cui, Z.; Huang, B.; Dou, H.; Tan, G.; Zheng, S.; Zhou, T. GSA-ELM: A hybrid learning model for short-term traffic flow forecasting. IET Intell. Trans. Syst. 2021, 16, 1–12. [Google Scholar] [CrossRef]
- Luo, C.; Huang, C.; Cao, J.; Lu, J.; Huang, W.; Guo, J.; Wei, Y. Short-Term Traffic Flow Prediction Based on Least Square Support Vector Machine with Hybrid Optimization Algorithm. Neural Process. Lett. 2019, 50, 2305–2322. [Google Scholar] [CrossRef]
- Axenie, C.; Bortoli, S. Road Traffic Prediction Dataset. 2020. Available online: https://zenodo.org/record/3653880#.YdupBWhBxPY (accessed on 20 December 2021).
- Hou, Y.; Chen, J.; Wen, S. The effect of the dataset on evaluating urban traffic prediction. Alex. Eng. J. 2021, 60, 597–613. [Google Scholar] [CrossRef]
- Chen, C.; Wang, Y.; Li, L.; Hu, J.; Zhang, Z. The retrieval of intra-day trend and its influence on traffic prediction. Transp. Res. Part C Emerg. Technol. 2012, 22, 103–118. [Google Scholar] [CrossRef]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-Learn: Machine Learning in Python. 2011. Available online: scikit-learn.org (accessed on 20 December 2021).
- Chollet, F. Keras. 2015. Available online: keras.io (accessed on 20 December 2021).
- Bisong, E. Google Colaboratory BT—Building Machine Learning and Deep Learning Models on Google Cloud Platform: A Comprehensive Guide for Beginners. 2019. Available online: https://link.springer.com/chapter/10.1007/978-1-4842-4470-8_7 (accessed on 20 December 2021).
- Biewald, L. Experiment Tracking with Weights and Biases. 2020. Available online: wandb.com (accessed on 20 December 2021).
- Cai, L.; Janowicz, K.; Mai, G.; Yan, B.; Zhu, R. Traffic transformer: Capturing the continuity and periodicity of time series for traffic forecasting. Trans. GIS 2020, 24, 736–755. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ML/DL Model | MAE | MAPE | RMSE | EV Score | |
|---|---|---|---|---|---|
| MLP-NN | 10.8281 | 21.1593% | 15.4202 | 0.9304 | 0.9307 |
| Gradient Boosting | 10.8508 | 21.9493% | 15.4121 | 0.9305 | 0.9306 |
| Random Forest | 10.8827 | 21.8392% | 15.5481 | 0.9296 | 0.9297 |
| GRU | 10.8843 | 22.8492% | 15.6191 | 0.9278 | 0.9295 |
| LSTM | 10.8806 | 22.3244% | 15.6771 | 0.9267 | 0.9287 |
| Linear Regression | 11.2010 | 24.3238% | 15.8545 | 0.9263 | 0.9264 |
| Stochastic Gradient | 12.8230 | 29.0075% | 18.3727 | 0.9003 | 0.9004 |
| ML/DL Model | MAE | MAPE | RMSE | EV Score | |
|---|---|---|---|---|---|
| MLP-NN | 7.2427 | 18.2176 | 9.8096 | 0.9393 | 0.9395 |
| Gradient Boosting | 7.12151 | 17.6224 | 9.6648 | 0.941 | 0.941 |
| Random Forest | 7.05046 | 17.3788 | 9.5799 | 0.9421 | 0.9421 |
| GRU | 7.64266 | 18.5307 | 10.2406 | 0.9338 | 0.9381 |
| LSTM | 7.32852 | 19.0923 | 9.8816 | 0.9384 | 0.9388 |
| Linear Regression | 7.51693 | 20.3822 | 10.1914 | 0.9344 | 0.9344 |
| Stochastic Gradient | 8.39243 | 23.7443 | 11.3199 | 0.9191 | 0.9194 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Navarro-Espinoza, A.; López-Bonilla, O.R.; García-Guerrero, E.E.; Tlelo-Cuautle, E.; López-Mancilla, D.; Hernández-Mejía, C.; Inzunza-González, E. Traffic Flow Prediction for Smart Traffic Lights Using Machine Learning Algorithms. Technologies 2022, 10, 5. https://doi.org/10.3390/technologies10010005
Navarro-Espinoza A, López-Bonilla OR, García-Guerrero EE, Tlelo-Cuautle E, López-Mancilla D, Hernández-Mejía C, Inzunza-González E. Traffic Flow Prediction for Smart Traffic Lights Using Machine Learning Algorithms. Technologies. 2022; 10(1):5. https://doi.org/10.3390/technologies10010005
Chicago/Turabian StyleNavarro-Espinoza, Alfonso, Oscar Roberto López-Bonilla, Enrique Efrén García-Guerrero, Esteban Tlelo-Cuautle, Didier López-Mancilla, Carlos Hernández-Mejía, and Everardo Inzunza-González. 2022. "Traffic Flow Prediction for Smart Traffic Lights Using Machine Learning Algorithms" Technologies 10, no. 1: 5. https://doi.org/10.3390/technologies10010005