
Optimization of the Conceptual Design of a Multistage Rocket Launcher

 , , ,
, , ,
Abstract
:1. Introduction and State of the Art
- The use of a multistage rocket, as proposed by, among others, Tsiolkovsky. A SSTO (Single Stage to Orbit) would consume more fuel, but if complete reusability could be achieved, as in the case of an airplane, the cost savings would be significant. Unfortunately, the efficiency of the engines prevents their use in these scenarios. Multistage rockets increase performance, eliminating part of the mass that is no longer necessary during the ascent to orbit: By dividing the rocket into multiple zones or stages, we can reduce the size of these losses. Each stage will, thus, have a fraction of the total propellant, which can be optimized to maximize performance. Another advantage comes from the type of propellant: the first stages, being subjected to higher atmospheric pressures, have to withstand a greater aerodynamic drag, together with a substantial modification in the propulsive performance of the nozzle. High pressures present in the early stages require a shorter nozzle geometry, while in vacuum or at high altitudes, a more elongated shape is preferable for optimal performance. Therefore, this is one of the most remarkable advantages of the use of several stages since it allows to use different engines, depending on the external conditions, thus improving the overall efficiency of the rocket. Finally, a multistage rocket allows for the use of different propellants, depending on the stage. The first stages tend to use solid or liquid fuel based on hydrocarbons, which can achieve the great thrusts necessary to overcome the gravitational attraction, while being relatively low cost. For the following stages, the required thrust is substantially lower, as sub-orbital speeds are reached. In this way, fuels are chosen that admit a large specific impulse with a low volume. Therefore, in these stages, high efficiencies can be achieved without an excessive increase in cost [3]. On the contrary, for multistage rockets, one or more engines will be required at each stage, thus increasing the cost and structural fraction of the whole. The complexity of design and manufacturing also increases, leading to additional reliability issues.
- Optimization of launch parameters, among others: the mass distribution between the stages, the most suitable engine for each of them, the size and mass of the resulting rocket, the amount of propellant required, and the ascent path. All these factors interact with each other, so the optimal solution will be given by an adequate balance between all the elements.
2. Materials and Methods
2.1. System Modeling
2.1.1. Cost Model
2.1.2. Propulsive Model
2.1.3. Atmospheric and Gravitational Model
2.1.4. Mass Model
2.1.5. Aerodynamical Model
- The angle of attack is small, typically less than 10° in atmospheric flight.
- The flow is uniform around the rocket.
- The rocket is axisymmetric, which is the case in serial staged vehicles without fins. Thus, only serial rockets are considered on the trajectory analysis. However, if the vehicle has fins, an additional term can be added on (15) to take into account the additional drag, as described in the study of Caporaso [27].
- The lift is negligible.
- Induced drag is considered negligible.
- The variation in drag with the angle of attack is also negligible.
2.2. Algorithm Design
2.2.1. Optimization Algorithm
2.2.2. Optimal Stage Distribution
2.2.3. Design Optimization
2.2.4. Trajectory Optimization
- 6 state variables: r, , θ, V, γ, χ
- 2 control variables: α, β
- 1 independent monotonically increasing variable: t
3. Results and Discussion
3.1. Mass Optimization Validation
3.2. Design Algorithm Application
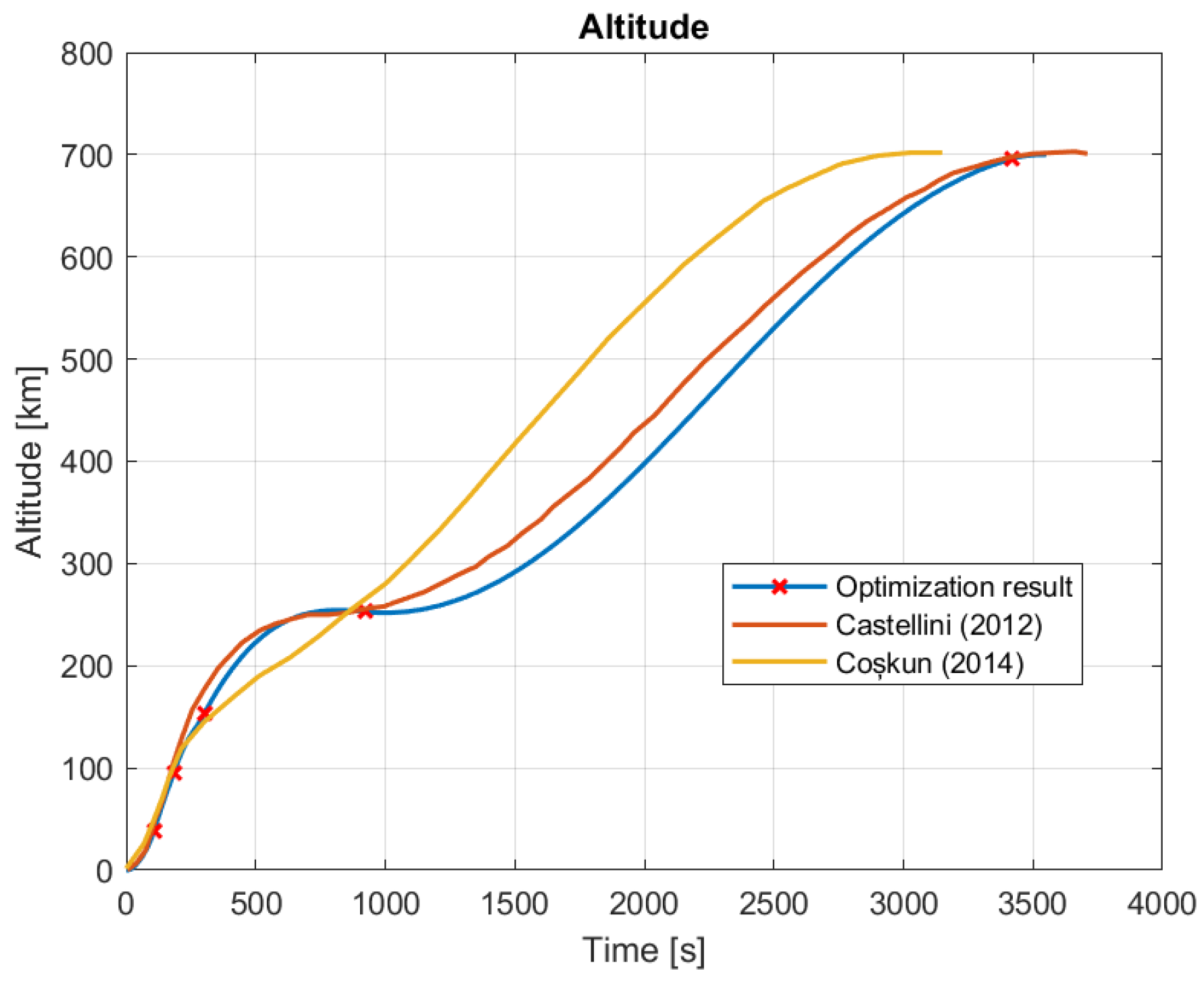
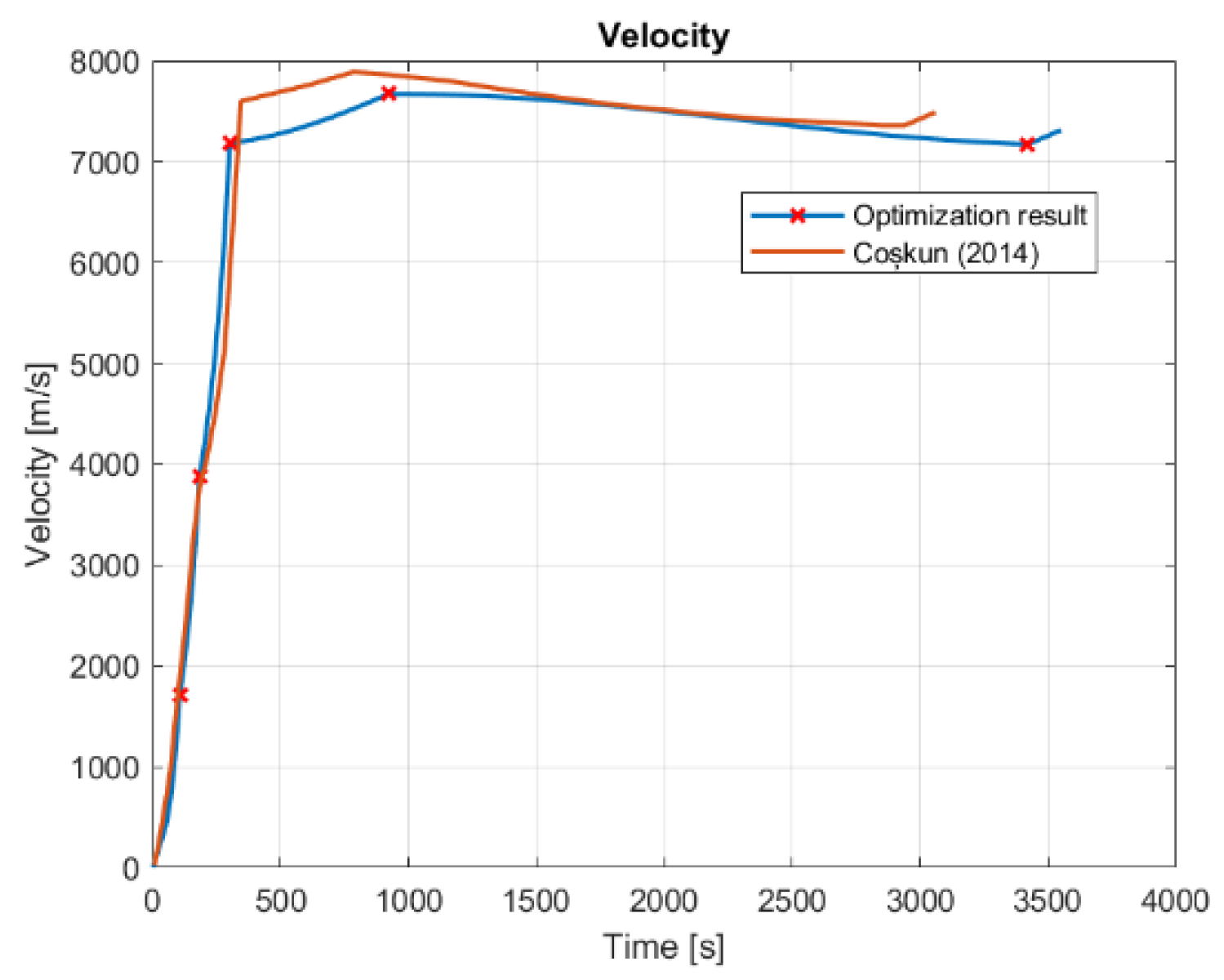
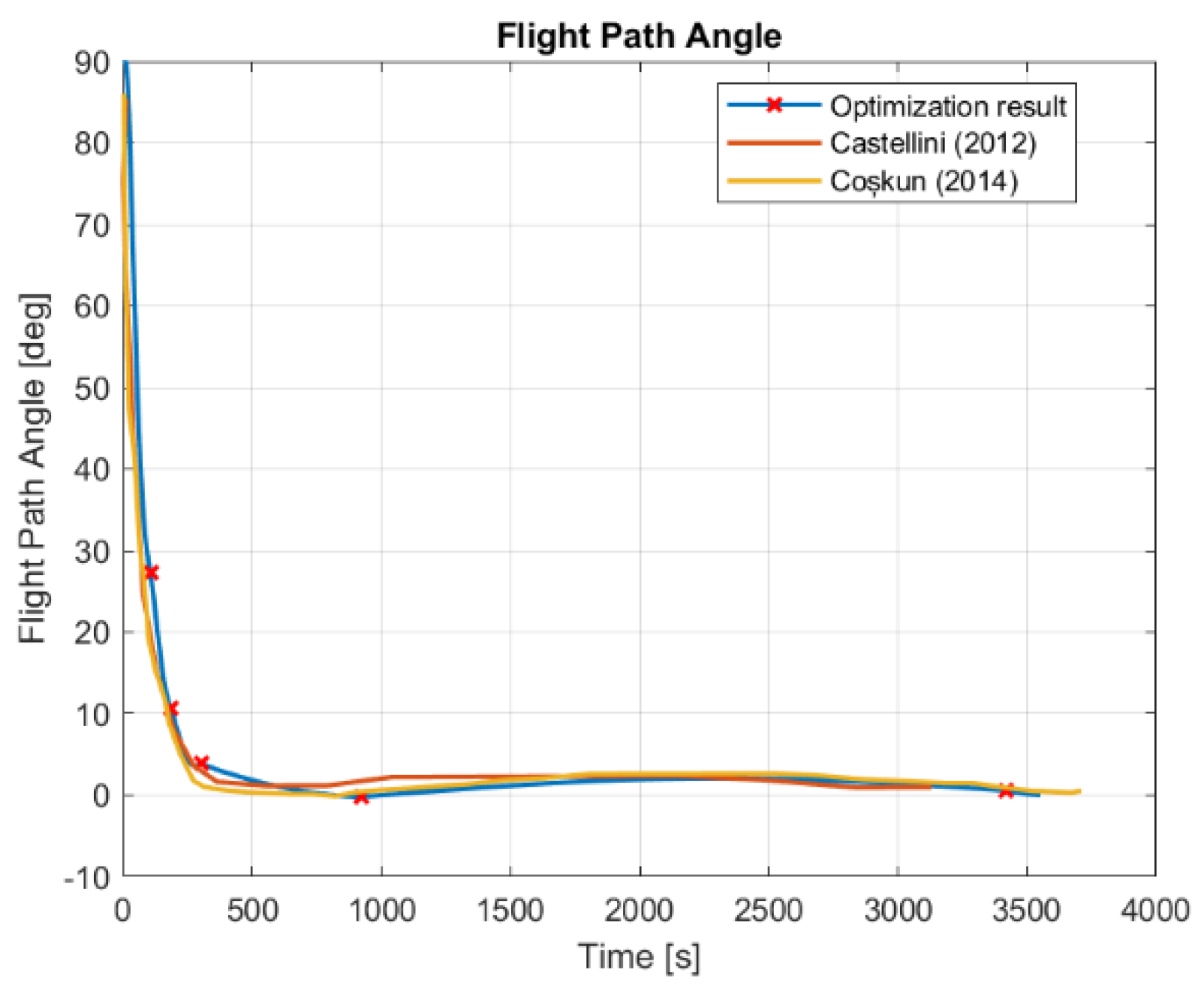
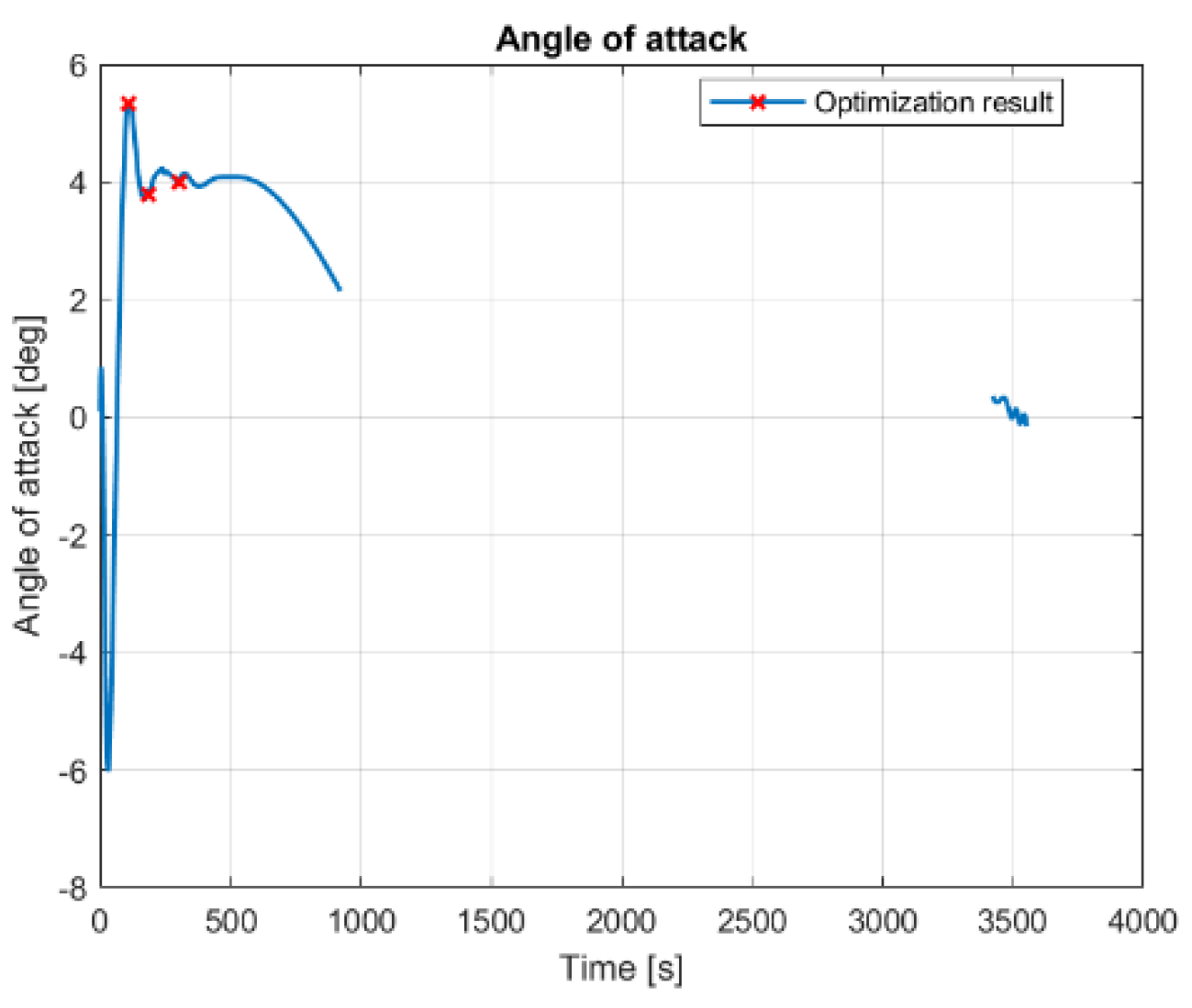
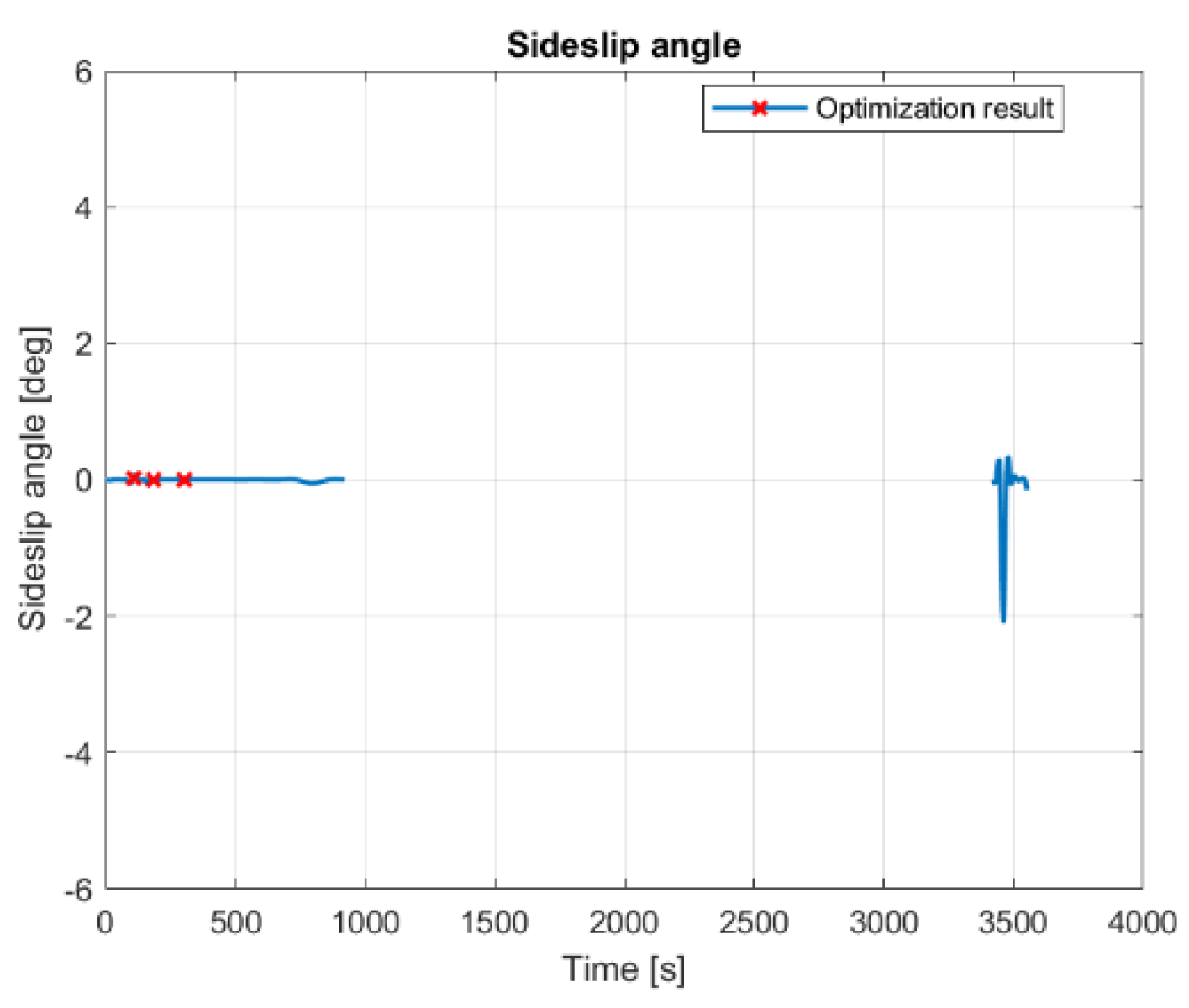
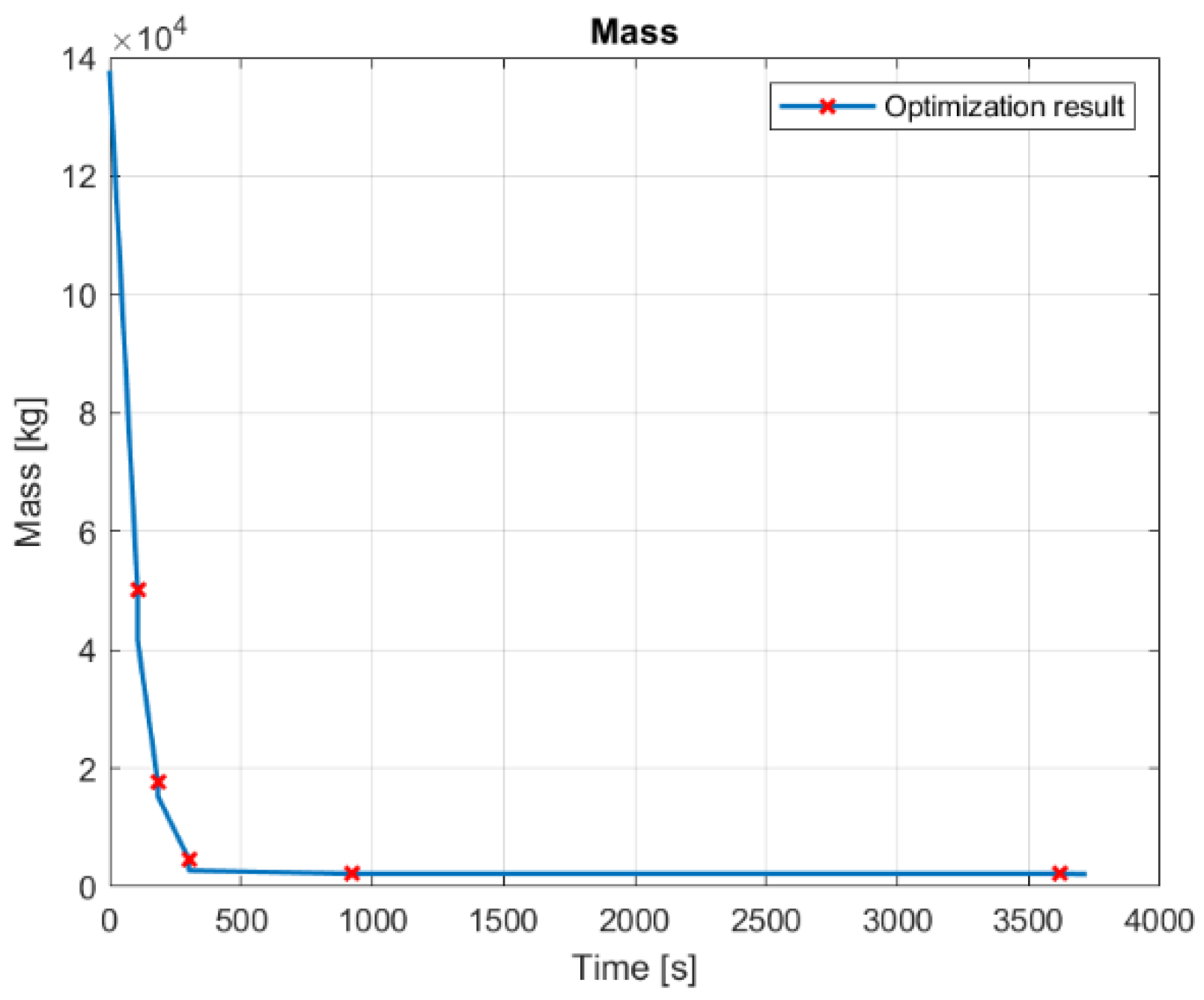
3.3. Trajectory Optimization Application
- The angle of attack and slip angle is limited, for structural reasons, to 6 degrees at altitudes below 100 km and 15 degrees for higher altitudes [36].
- The aerodynamic load is the product of the dynamic pressure and the angle of attack, and it affects the integrity of the rocket. The considered limit is 230,000 Pa degrees [36].
4. Conclusions and Future Works
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Satellite Database|Union of Concerned Scientists. Available online: https://www.ucsusa.org/resources/satellite-database (accessed on 1 February 2022).
- McConnaughey, P.K.; Femminineo, M.G.; Koelfgen, S.J.; Lepsch, R.A.; Ryan, R.M.; Taylor, S.A. Launch Propulsion Systems Roadmap. Technol. Area 2012, 1, 78−92. [Google Scholar]
- Tewari, A. Atmospheric and Space Flight Dynamics: Modeling and Simulation with MATLAB® and Simulink®; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Tewari, A. Advanced Control of Aircraft, Spacecraft, and Rockets, Aerospace Series; Wiley: Chichester, UK, 2011. [Google Scholar]
- Coşkun, E.C. Multistage Launch Vehicle Design with Thrust Profile and Trajectory Optimization. Ph.D. Dissertation, Middle East Technical University, Ankara, Turkey, 2014. [Google Scholar] [CrossRef]
- Conway, B.A. (Ed.) Spacecraft Trajectory Optimization; Cambridge University Press: Cambridge, UK, 2010; Volume 29. [Google Scholar]
- Rao, A. A Survey of Numerical Methods for Optimal Control. Adv. Astronaut. Sci. 2010, 135, 1. [Google Scholar]
- Betts, J.T. Survey of Numerical Methods for Trajectory Optimization. J. Guid. Control. Dyn. 1998, 21, 193–207. [Google Scholar] [CrossRef]
- Gath, P.F.; Well, K.H.; Mehlem, K. Initial Guess Generation for Rocket Ascent Trajectory Optimization Using Indirect Methods. J. Spacecr. Rocket. 2002, 39, 515–521. [Google Scholar] [CrossRef]
- Pontani, M. Particle swarm optimization of ascent trajectories of multistage launch vehicles. Acta Astronaut. 2014, 94, 852–864. [Google Scholar] [CrossRef]
- Filatyev, A.S.; Yanova, O.V. Through optimization of branching injection trajectories by the Pontryagin maximum principle using stochasticmodels. Acta Astronaut. 2011, 68, 1042–1050. [Google Scholar] [CrossRef]
- Brusch, R.G. A nonlinear programming approach to space shuttle trajectory optimization. J. Optim. Theory Appl. 1974, 13, 94–118. [Google Scholar] [CrossRef]
- Jänsch, C.; Schnepper, K.; Well, K.H. Multi-phase trajectory optimization methods with applications to hypersonic vehicles. In Applied Mathematics in Aerospace Science and Engineering. Mathematical Concepts and Methods in Science and Engineering; Miele, A., Salvetti, A., Eds.; Springer: Boston, MA, USA, 1994; Volume 44. [Google Scholar] [CrossRef]
- Bollino, K.P.; Bollino, K.P. High-Fidelity Real-Time Trajectory Optimization for Reusable Launch Vehicles; Naval Postgraduate School Monterey: Monterey, CA, USA, 2006. [Google Scholar]
- Zotes, F.A.; Penas, M.S. Multi-criteria genetic optimisation of the manoeuvres of a two-stage launcher. Inf. Sci. 2010, 180, 896–910. [Google Scholar] [CrossRef]
- Nguyen, H. Optimal Ascent Trajectories of the Horizontal Takeoff Single-Stage and Two-Stage-to-Orbit Launchers. In Proceedings of the Navigation and Control Conference; American Institute of Aeronautics and Astronautics: New Orleans, LA, USA, 1991. [Google Scholar]
- Yanova, O.; Filatyev, A. ASTER program package for the thorough trajectory optimization. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, American Institute of Aeronautics and Astronautics, Montreal, QC, Canada, 6–9 August 2001. [Google Scholar] [CrossRef]
- Handbook of Space Technology; Ley, W.; Wittmann, K.; Hallmann, W. (Eds.) Wiley: Chichester, UK, 2009; ISBN 978-1-60086-701-9. [Google Scholar]
- Sarigul-Klijn, M.; Sarigul-Klijn, N. Flight mechanics of manned sub-orbital reusable launch vehicles with recommendations for launch and recovery. In Proceedings of the 41st Aerospace Sciences Meeting and Exhibit, Aerospace Sciences Meetings, American Institute of Aeronautics and Astronautics, Reno, NV, USA, 6–9 January 2003. [Google Scholar] [CrossRef] [Green Version]
- Wertz, J.R.; Larson, W.J. (Eds.) Space Mission Analysis and Design, 3rd ed.; Space Technology Library, Microcosm; Kluwer: El Segundo, CA, USA; Dordrecht, The Netherlands; Boston, UK, 1999. [Google Scholar]
- Haidn, O.J. Advanced Rocket Engines. In Advances on Propulsion Technology for High-Speed Aircraft; Educational Notes RTO-EN-AVT-150, Paper 6; RTO: Neuilly-sur-Seine, France, 2008; pp. 6-1–6-40. [Google Scholar]
- Braeunig, R.A. Basics of Space Flight: Rocket Propellants. Available online: http://www.braeunig.us/space/propel.htm (accessed on 8 December 2021).
- Sutton, G.P.; Biblarz, O. Rocket Propulsion Elements, 8th ed.; Wiley: Hoboken, NJ, USA, 2010. [Google Scholar]
- Wade, M. Encyclopedia Astronautica. 2019. Available online: http://www.astronautix.com/ (accessed on 8 December 2021).
- Meng, Z.; Li, G.; Wang, X.; Sait, S.M.; Yıldız, A.R. A comparative study of metaheuristic algorithms for reliability-based design optimization problems. Arch. Comput. Methods Eng. 2021, 28, 1853–1869. [Google Scholar] [CrossRef]
- Akin, D.A. Mass Estimating Relations; University of Maryland: College Park, MD, USA, 2016. [Google Scholar]
- Mandell, G.K.; Caporaso, G.J.; Bengen, W.P. Topics in Advanced Model Rocketry; MIT Press: Cambridge, MA, USA, 1990. [Google Scholar]
- Hoerner, S.F. Fluid-Dynamic Drag: Practical Information on Aerodynamic Drag and Hydrodynamic Resistance; Hoerner Fluid Dynamics: Bakersfield, CA, USA, 1992. [Google Scholar]
- Fleeman, E.L. Tactical Missile Design, AIAA Education Series; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2001. [Google Scholar]
- Torczon, V. On the Convergence of Pattern Search Algorithms. SIAM J. Optim. 1997, 7, 1–25. [Google Scholar] [CrossRef]
- Civek-Coskun, E.; Ozgoren, K. A Generalized Staging Optimization Program for Space Launch Vehicles. In Proceedings of the 2013 6th International Conference on Recent Advances in Space Technologies (RAST); IEEE: Istanbul, Turkey, 2013; pp. 857–862. [Google Scholar]
- Koelle, D.E. Handbook of Cost Engineering for Space Transportation Systems with TRANSCOST 8.2: Statistical-Analytical Model for Cost Estimation and Economical Optimization of Launch Vehicles; TransCostSystems: Amiens, France, 2013. [Google Scholar]
- Isakowitz, S.J.; Hopkins, J.P.; Hopkins, J.B. International Reference Guide to Space Launch Systems, 4th ed.; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2004. [Google Scholar]
- Rockets—Spaceflight101. Rockets. 2022. Available online: https://spaceflight101.com/spacerockets/ (accessed on 1 February 2022).
- Castellini, F. Multidisciplinary Design Optimization for Expendable Launch Vehicles; Politecnico di Milano: Milan, Italy, 2012. [Google Scholar]
- Ritter, P.; Lyne, J.E. Design and selection process for optimized heavy lift launch vehicles. In Proceedings of the 48th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, American Institute of Aeronautics and Astronautics, Atlanta, Georgia, 30 July–1 August 2012. [Google Scholar] [CrossRef]
- Cremaschi, F. Trajectory optimization for launchers and re-entry vehicles. In Modeling and Optimization in Space Engineering, 127th ed.; Fasano, G., Pintér, J.D., Eds.; Springer (Springer Optimization and Its Applications): Berlin/Heidelberg, Germany, 2012; pp. 159–185. [Google Scholar]
- Federici, L.; Zavoli, A.; Colasurdo, G.; Mancini, L.; Neri, A. Integrated Optimization of Ascent Trajectory and SRM Design of Multistage Launch Vehicles; Cornell University: Ithaca, NY, USA, 2019. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Mass (t) |
|---|---|
| Small | 0–2 |
| Midsize | 2–20 |
| Heavy | 20–50 |
| Super heavy | >50 |
| Engines | Propellant | Thrust [kN] | Specific Impulse (vac) [s] | Mixture Ratio | Expansion Ratio | Height [m] | Diameter [m] | Mass [kg] |
|---|---|---|---|---|---|---|---|---|
| 11D58M | LO2/Kerosene | 79.5 | 353 | 2.48 | 189 | 2.27 | 1.17 | 230 |
| RD-0210 | N2O4/UDMH | 582 | 327 | 1.95 | 81.3 | 2.33 | 1.47 | 566 |
| AESTUS | N2O4/MMH | 30 | 325 | 2.05 | 84 | 2.2 | 1.32 | 111 |
| J-2 | LO2/LH2 | 890 | 426 | 5.5 | 28 | 3.38 | 2.01 | 1438 |
| YF-75 | LO2/LH2 | 79 | 440 | 5 | 80 | 2.8 | 1.5 | 550 |
| LE-5B | LO2/LH2 | 137 | 447 | 5 | 110 | 2.78 | 2.15 | 269 |
| HM7-B | LO2/LH2 | 70 | 447 | 5.14 | 83.1 | 1.8 | 1 | 155 |
| VINCI | LO2/LH2 | 180 | 465 | 4.83 | 240 | 4.2 | 2.15 | 550 |
| RL-10B | LO2/LH2 | 110 | 462 | 4.83 | 250 | 4.15 | 2.13 | 301 |
| Engine | Propellant | Thrust [MN] | Specific Impulse (sl.) [s] | Mixture Ratio | Expansion Ratio | Height [m] | Diameter [m] | Mass [kg] |
|---|---|---|---|---|---|---|---|---|
| RD-170 | LO2/Kerosene | 7.65 | 310 | 2.6 | 36.87 | 3.78 | 4.02 | 9750 |
| RD-180 | LO2/Kerosene | 3.82 | 311 | 2.72 | 36.4 | 3.56 | 3.15 | 5480 |
| RD-107 | LO2/Kerosene | 0.81 | 257 | 2.06 * | 18.86 | 2.578 | 1.85 | 1250 |
| F-1 | LO2/RP1 | 6.91 | 264 | 2.27 | 16 | 5.64 | 3.72 | 8391 |
| MA-5A | LO2/RP1 | 1.84 | 263 | 2.25 | 8 | 3.43 | 1.19 | 1610 |
| RS-27 | LO2/RP1 | 0.91 | 263 | 2.245 | 8 | 3.63 | 1.07 | 1027 |
| RD-253 | N2O4/UDMH | 1.47 | 285 | 2.67 | 26.4 | 3 | 1.5 | 1300 |
| YF-20 | N2O4/UDMH | 0.76 | 259 | 1.95 * | 10 | 2 * | 0.84 | 712.5 * |
| Viking 6 | N2O4/UH25 | 0.68 | 249 | 1.71 | 10.5 | 2.87 | 0.99 | 826 |
| RS-68 | LO2/LH2 | 2.89 | 360 | 4.83 * | 21.5 | 5.2 | 2.43 | 6600 |
| RD-108 | LO2/Kerosene | 0.78 | 252 | 2.77 * | 18.9 | 2.86 | 0.67 | 1250 |
| Viking 5C | N2O4/UH25 | 0.68 | 249 | 1.7 | 11 | 2.87 | 2.22 | 826 |
| YF-20B | N2O4/UDMH | 0.73 | 259 | 1.95 * | 10 | 2 * | 0.84 | 712.5 |
| RS-68 | LO2/LH2 | 2.89 | 360 | 4.83 * | 21.5 | 5.2 | 2.43 | 6597 |
| SSME | LO2/LH2 | 1.82 | 364 | 6 | 77.5 | 4.24 | 1.63 | 3177 |
| RD-0120 | LO2/LH2 | 1.51 | 359 | 6 | 85.7 | 4.55 | 2.42 | 3450 |
| LE-7A | LO2/LH2 | 0.84 | 338 | 5.9 | 51.9 | 3.67 | 2 * | 1800 |
| Vulcain 2 | LO2/LH2 | 0.94 | 320 | 6.7 | 61.5 | 3.6 | 2.1 | 811 |
| [m/s] | 7788.5 |
| [m/s] | −441.3 |
| [m/s] | 1200 |
| [m/s] | 100 |
| [m/s] | 35 |
| Hohmann transfer [m/s] | 3934.5 |
| [m/s] | 12,616.7 |
| Simulation | Real Data | Error [%] | |
|---|---|---|---|
| 401.640 | 402.800 | 0.288 | |
| 3.885 | 3.844 | 1.076 | |
| 1.083 | 1 | 8.298 | |
| n2 | 3.024 | 2.773 | 9.051 |
| 3.497 | 3.841 | 8.978 |
| Falcon 9 Full Thrust Reviewed | Atlas V 501 Reviewed | |
|---|---|---|
| Engine 1st stage | RD-180 (2 units) | RD-180 |
| Engine 2nd stage | VINCI (4 units) | 11D58M (5 units) |
| 1.112 | 1.25 | |
| 0.512 | 0.538 | |
| 2.901 | 2.708 | |
| 3.353 | 5.241 |
| Falcon 9 v1.2 | Atlas V 501 | |||
|---|---|---|---|---|
| Simulation | Real | Simulation | Real | |
| 465.070 | 572.000 | 228.680 | 337.887 | |
| Radius [m] | 3.78 | 1.83 | 1.896 | 1.905 |
| Length [m] | 68.858 | 71 | 41.591 | 32.46 |
| 0.0736 | 0.0579 | 0.0674 | 0.068 | |
| 0.157 | 0.0854 | 0.06 | 0.0842 | |
| [kg] | 465.070 | 549.000 | 228.680 | 337.887 |
| [kg] | 136.100 | 134.300 | 74.023 | 33.044 |
| 1.675 | 1.363 | 1.704 | 1.155 | |
| 0.540 | 0.709 | 0.548 | 0.306 | |
| 182.258 | Unknown | 45.870 | Unknown | |
| Stage 1 | Stage 2 | Stage 3 | Stage 4 | |
|---|---|---|---|---|
| Engine | P80 | Zefiro 23 | Zefiro 9 | AVUM |
| [s] | 280 | 287.5 | 295.5 | 314.6 |
| [kN] | 2261 | 871 | 260 | 245 |
| [kg] | 87,710 | 23,814 | 10,567 | 577 |
| [kg] | 137,798 | 41,535 | 15,235 | 2695 |
| Constraint | Limits |
|---|---|
for h ≥ 100 km | |
for h ≥ 100 km | |
| 1135 W/m2 (fairing) 40 MW/m2 (structure) |
| Orbital Element | Simulated Value | Goal Value | Absolute Error | Percentage Error |
|---|---|---|---|---|
| Altitude (instead of a) [km] | 699.99 | 700 | 0.01 | % |
| Eccentricity | 0.053 | 0 | 0.053 | - |
| Inclination [°] | 90.01 | 90 | 0.01 | 0.005% |
| Longitude of ascending node [°] | 6.20 | - | - | - |
| Perigee argument [°] | 35.57 | - | - | - |
| True anomaly [°] | 180.20 | - | - | - |
| Constraint | Trajectory Value | Constraint LIMIT |
|---|---|---|
| [°] | 6 | 15 (>100 km) |
| [°] | 0.34 | 15 (>100 km) |
| [Pa] | 43,651 | 55,000 |
| [Pa deg] | 88,450 | 230,000 |
| [W/m2] | 28,910,000 | 40,000,000 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Orgeira-Crespo, P.; Rey, G.; Ulloa, C.; Garcia-Luis, U.; Rouco, P.; Aguado-Agelet, F. Optimization of the Conceptual Design of a Multistage Rocket Launcher. Aerospace 2022, 9, 286. https://doi.org/10.3390/aerospace9060286
Orgeira-Crespo P, Rey G, Ulloa C, Garcia-Luis U, Rouco P, Aguado-Agelet F. Optimization of the Conceptual Design of a Multistage Rocket Launcher. Aerospace. 2022; 9(6):286. https://doi.org/10.3390/aerospace9060286
Chicago/Turabian StyleOrgeira-Crespo, Pedro, Guillermo Rey, Carlos Ulloa, Uxia Garcia-Luis, Pablo Rouco, and Fernando Aguado-Agelet. 2022. "Optimization of the Conceptual Design of a Multistage Rocket Launcher" Aerospace 9, no. 6: 286. https://doi.org/10.3390/aerospace9060286