
Geostationary Station-Keeping of Electric-Propulsion Satellite Equipped with Robotic Arms


Abstract
:1. Introduction
2. Thruster Configuration and Dynamics
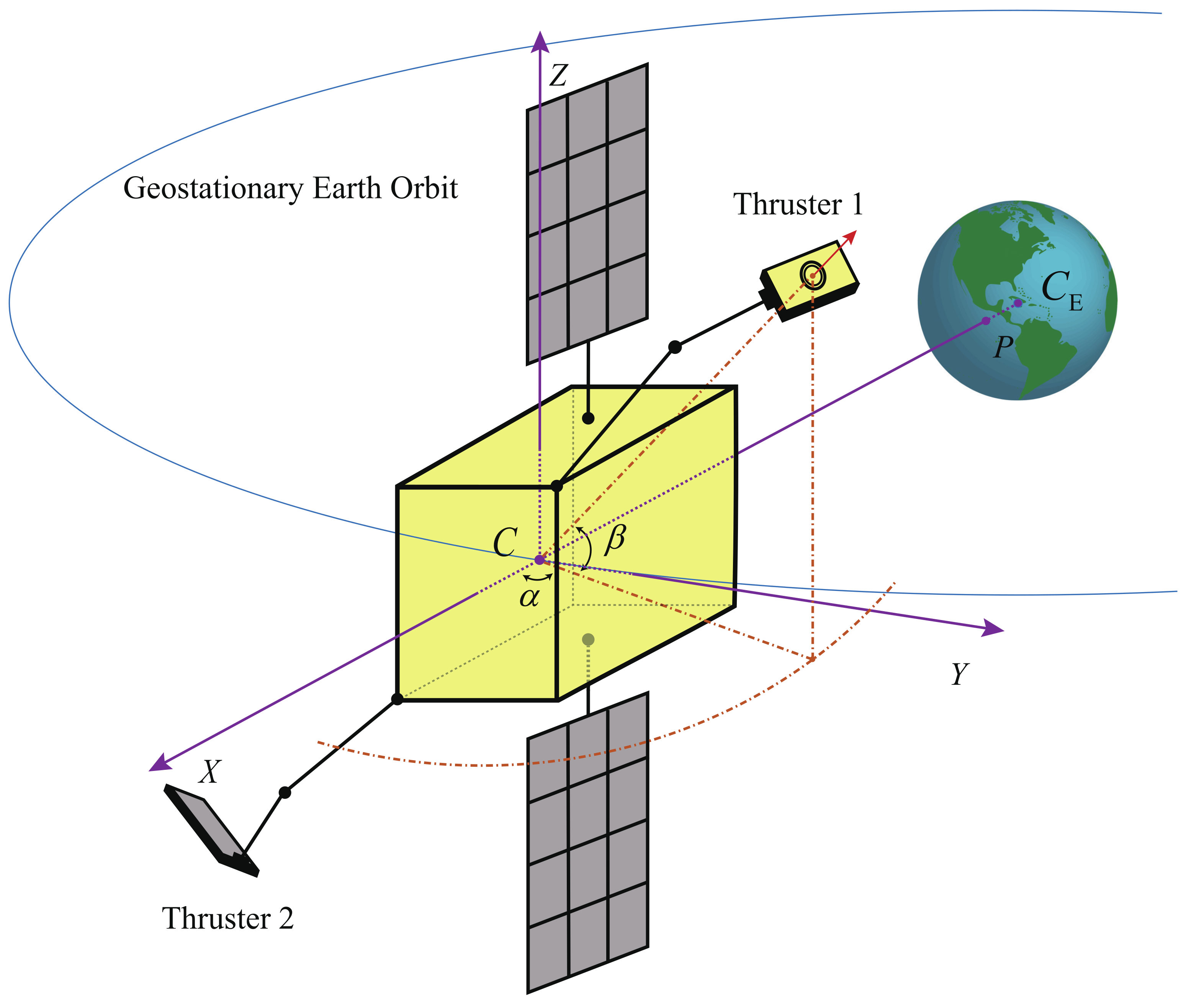
2.1. Thruster Configuration
2.2. Dynamics
3. Geostationary Station-Keeping Problem
3.1. Control Objectives
3.2. Constraints
- The thrust direction is limited by the robotic arms, as stated in Section 2.1.
- Although the thrust direction could be adjusted with the robotic arm, the adjustment is supposed to be completed before the maneuver. The robotic arms are locked during the working of thrusters.
- Because station-keeping is carried out at a fixed cycle, the length of each control cycle determines how far the satellite will drift during this time, making it essential to improve the control accuracy. Meanwhile, the control cycle should be the integer multiples of the orbital cycle to simplify the control problem. Therefore, the control cycle is assumed to be one orbital cycle in our work.
- Only one thruster can work at the same time due to the on-board power limitation.
- The reliable ignition times of the thruster are limited. In order to reduce the ignition times, each thruster only ignites once in one control cycle, and each ignition corresponds to one maneuver. For one control cycle, maneuver 1 is performed by thruster 1, and maneuver 2 is performed by thruster 2.
- The only exception to constraint 5 is that the satellite happens to enter the Earth’s shadow while the thruster is still working. Due to the lack of energy, the working of the thruster will be suspended until the satellite leaves the shadow region. In this case, one thruster actually carries out two maneuvers before and after entering the shadow region, but they will be regarded as one maneuver in the optimization.
- To reduce the ignition times, the minimum working time for each maneuver is 30 s.
3.3. Control Solution
4. Station-Keeping Controller Design
4.1. State Predictor
4.2. Quick Feedforward Controller
4.3. Fuel-Optimal Model Predictive Controller
5. Numerical Simulations
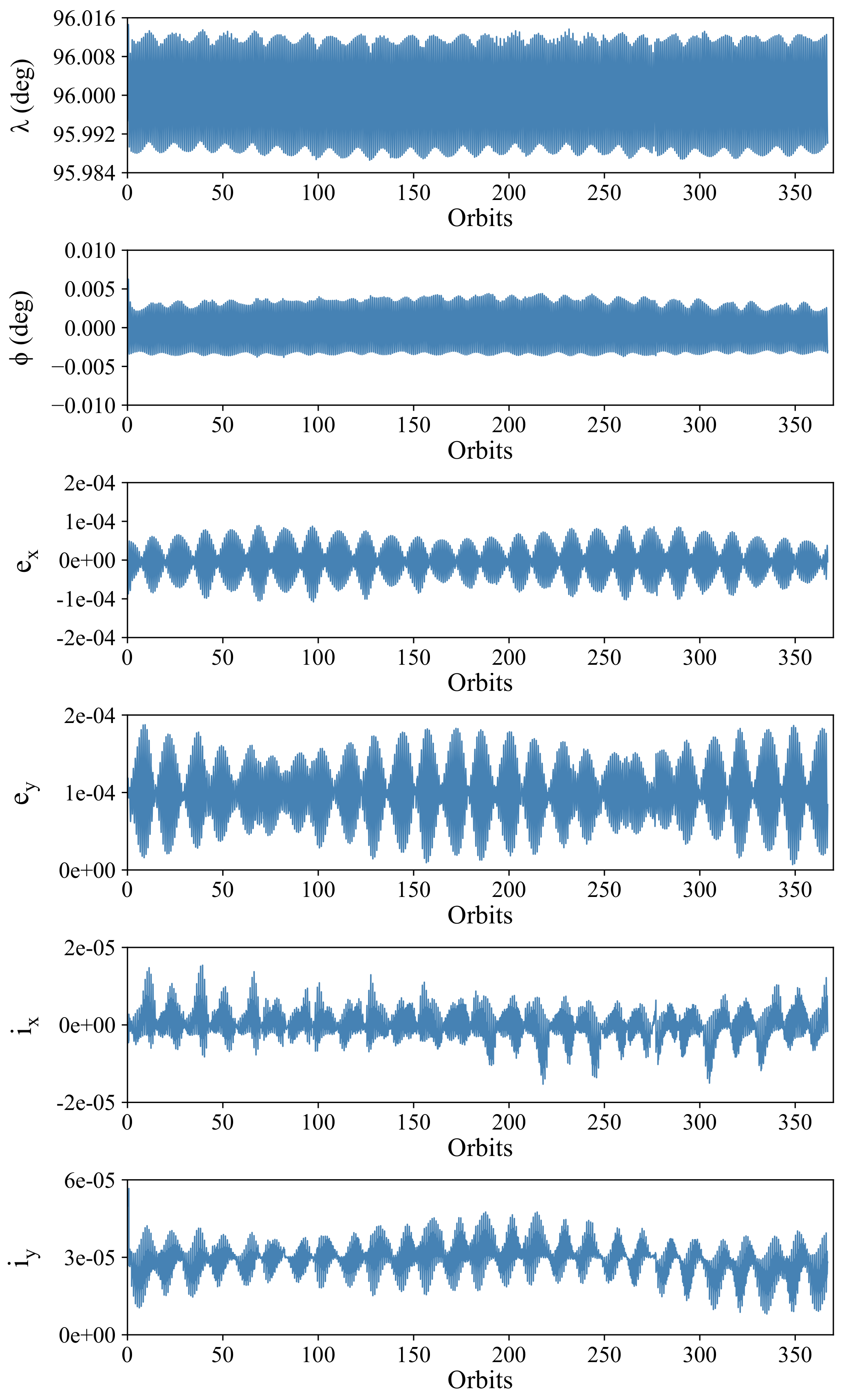
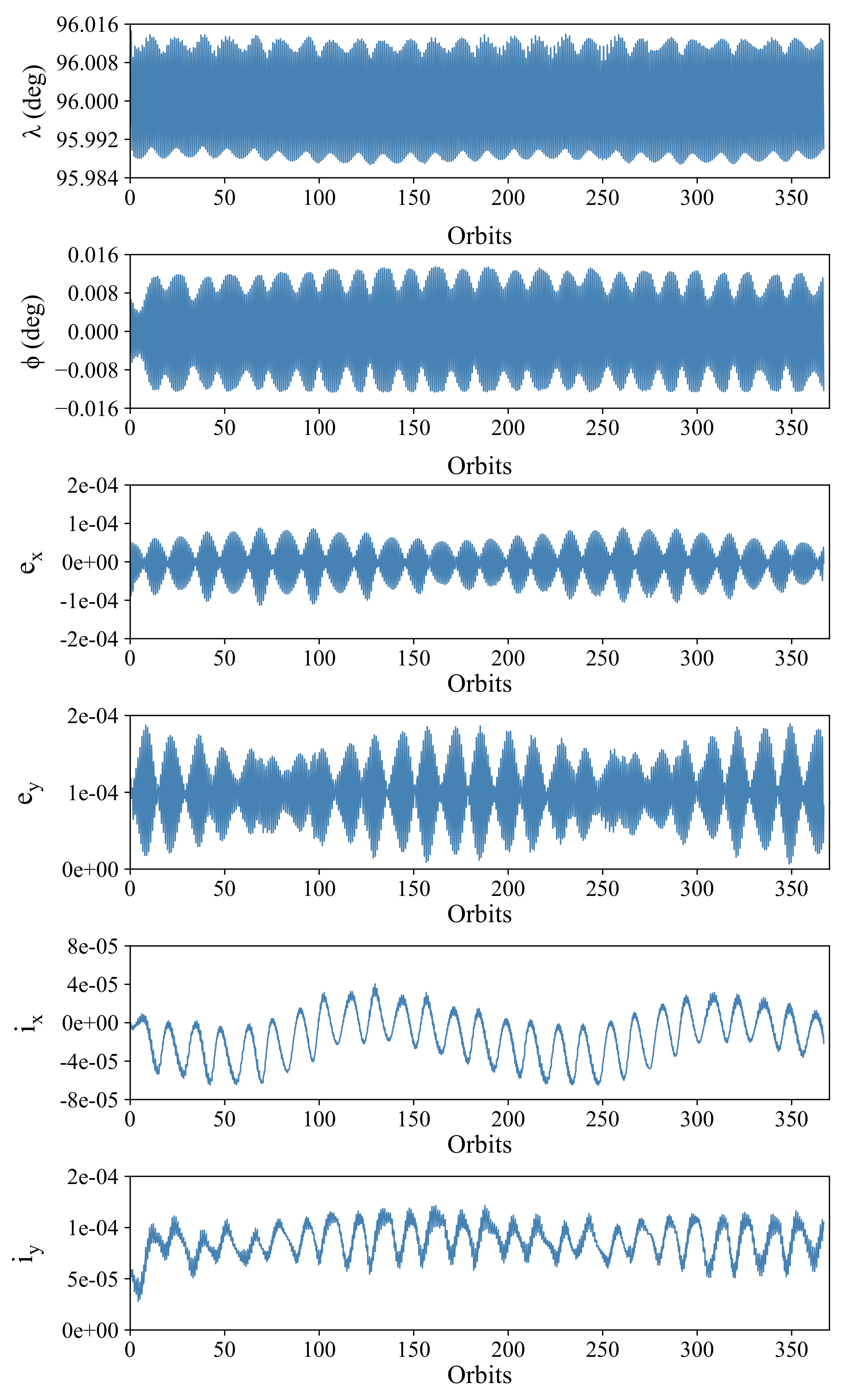
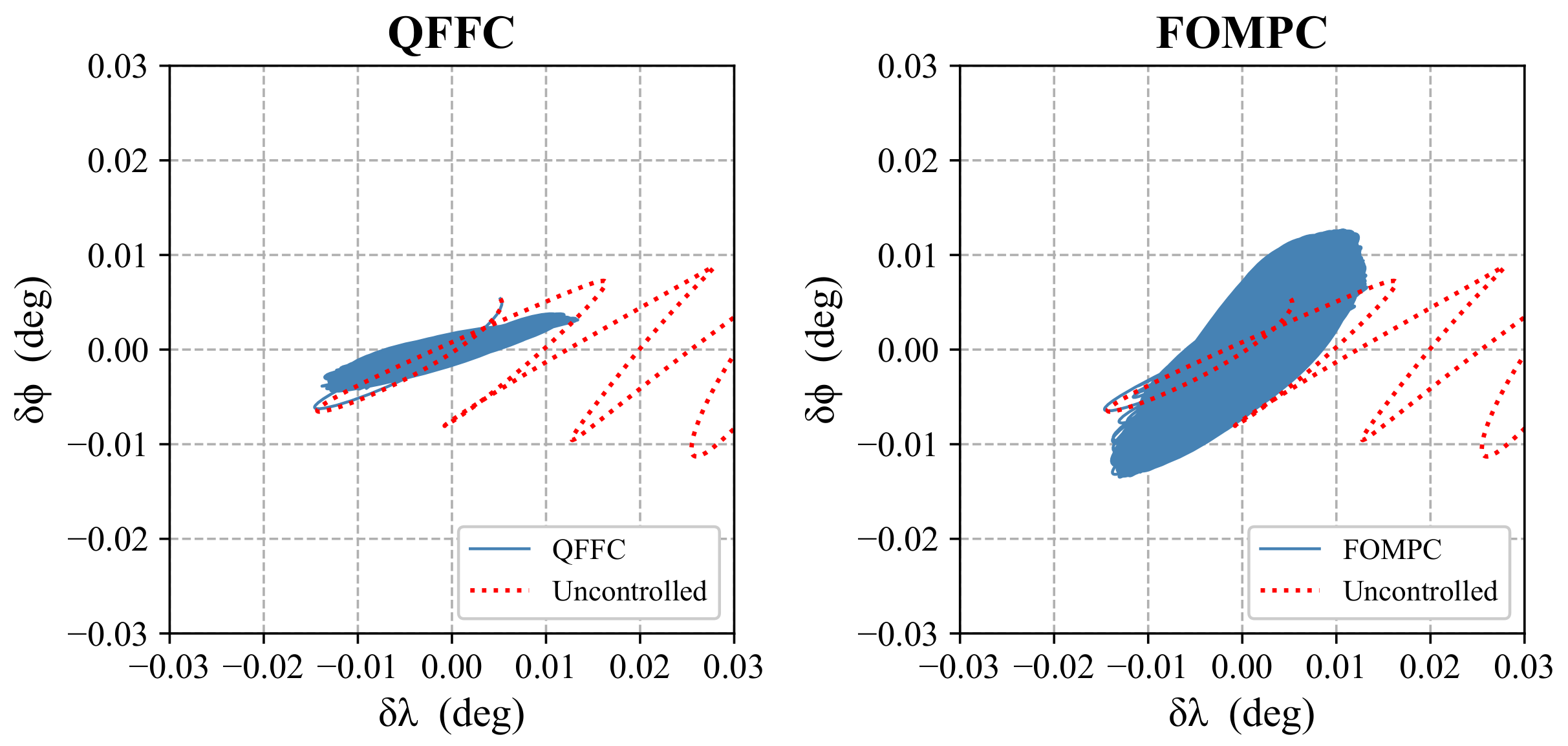
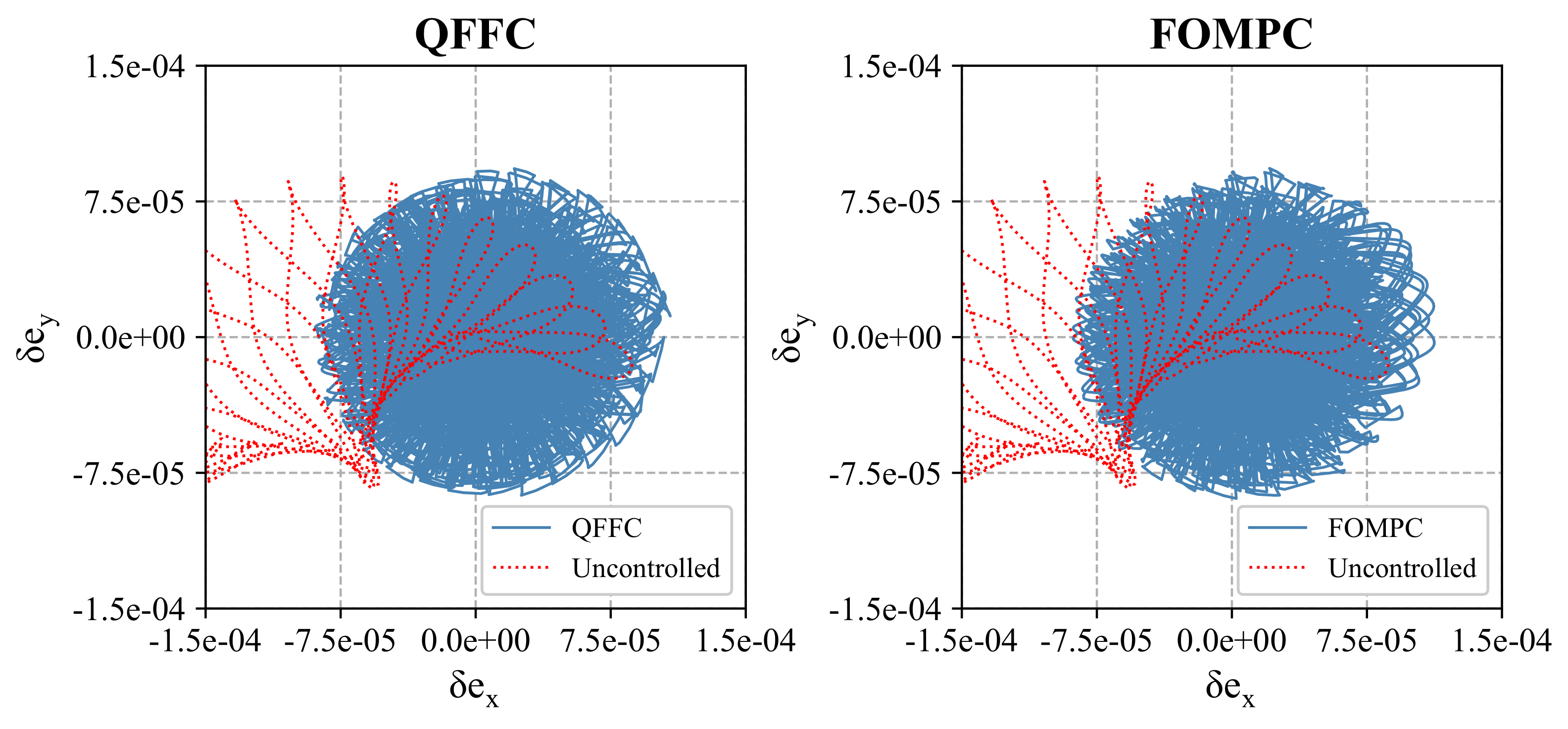
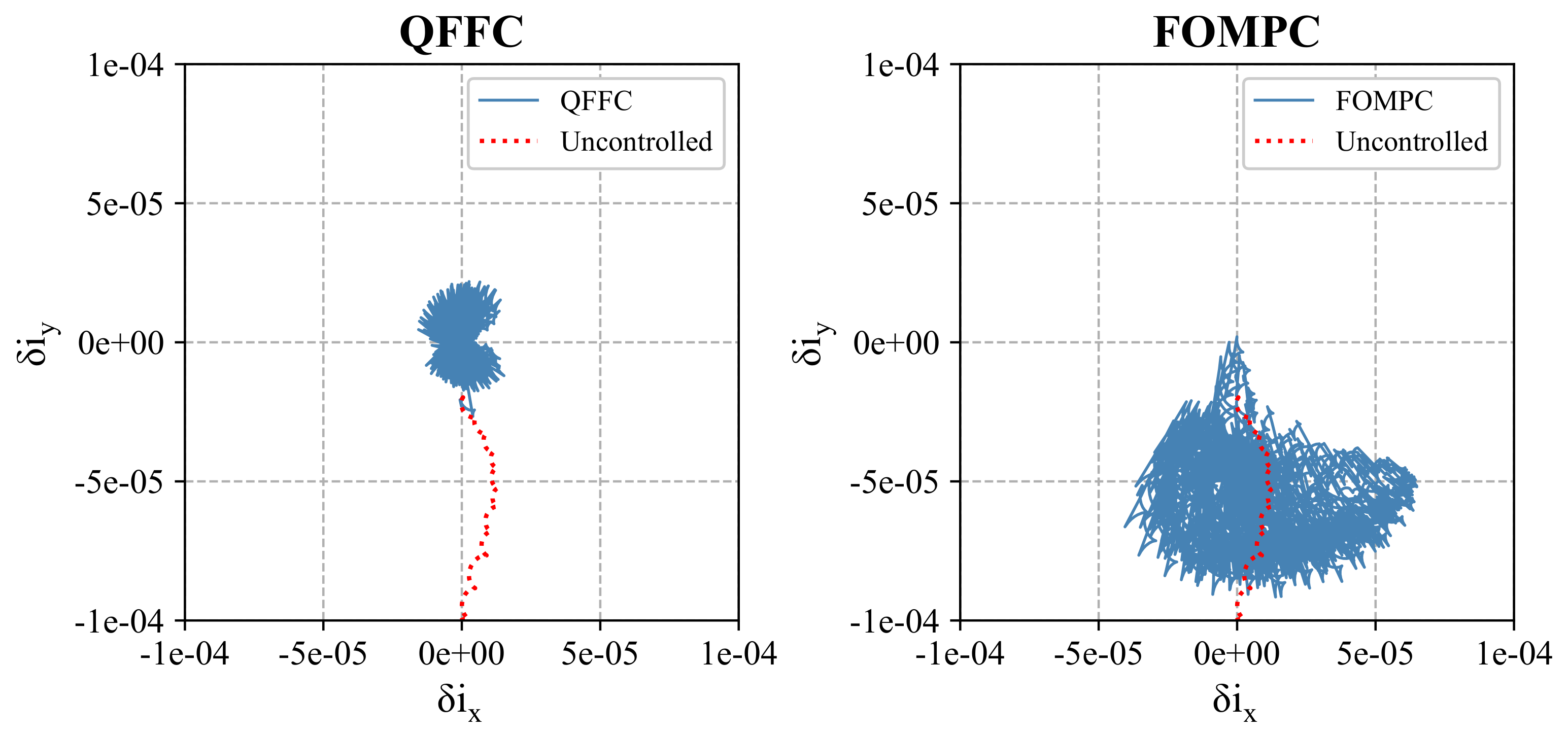
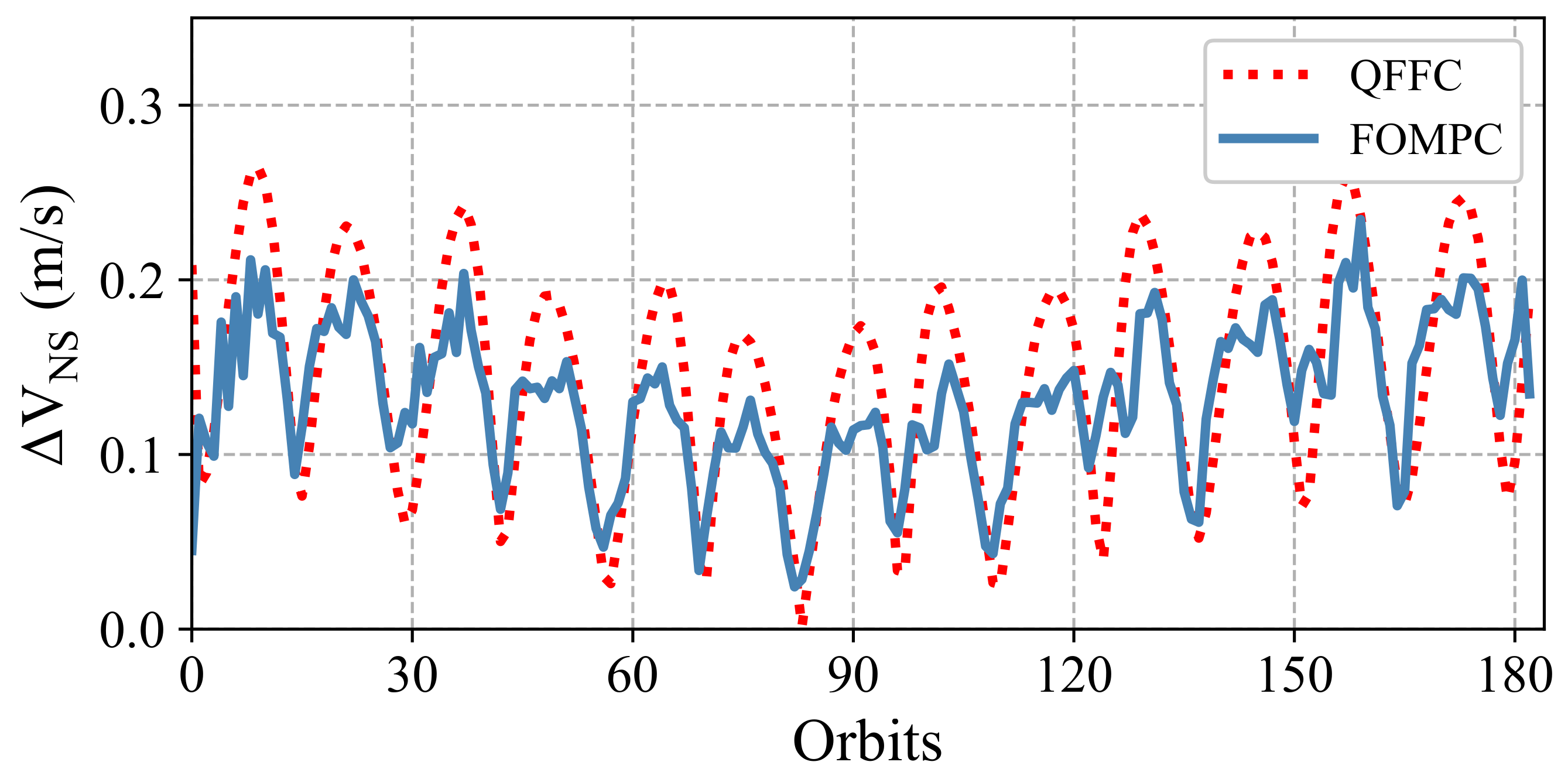
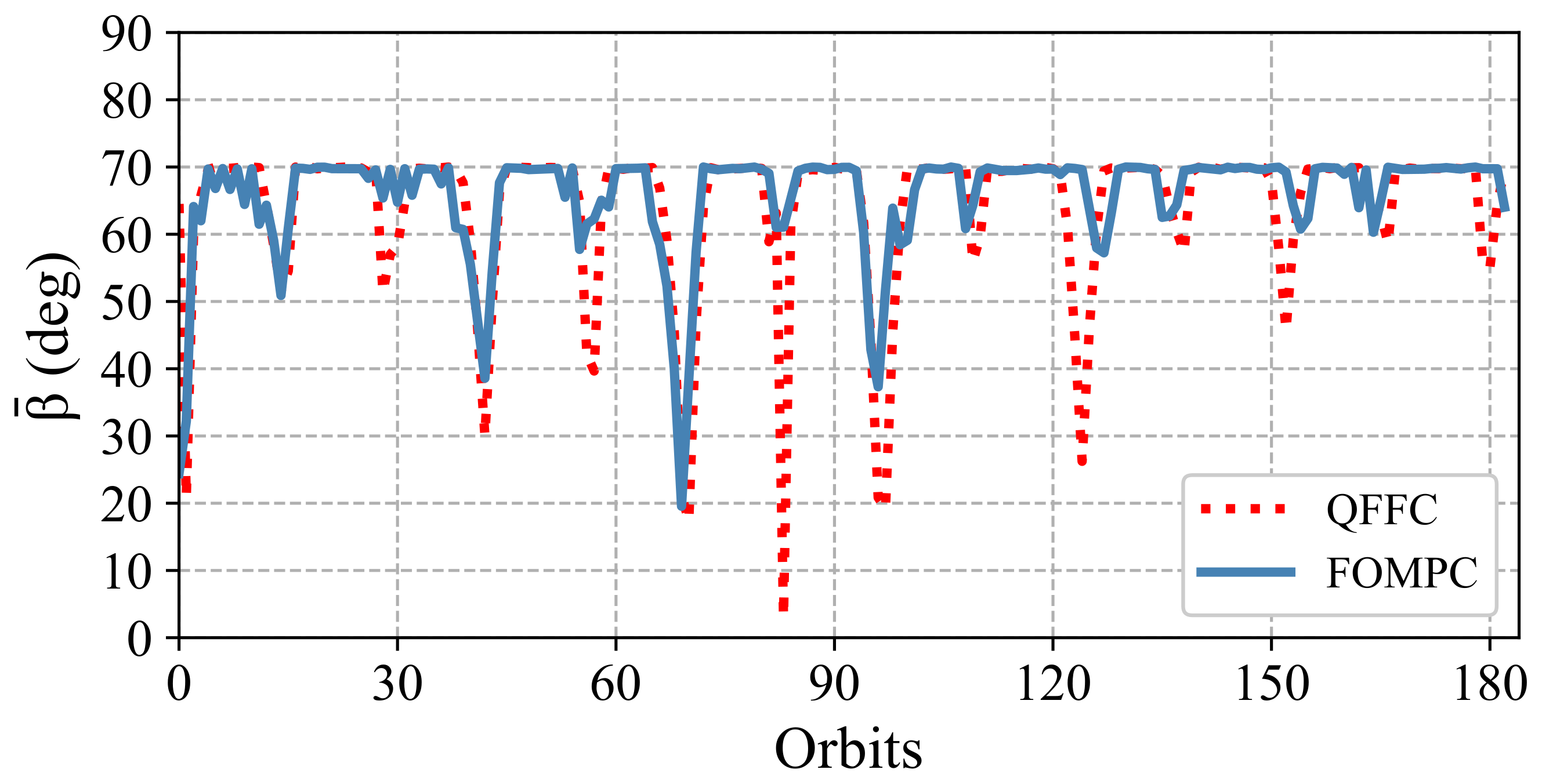
5.1. Results
5.2. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lemmens, M. Geo-Information: Technologies, Applications and the Environment; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011; Volume 5. [Google Scholar]
- Finch, M.J. Limited space: Allocating the geostationary orbit. Nw. J. Int’l L. Bus. 1985, 7, 788. [Google Scholar]
- Lee, B.S.; Lee, J.S.; Choi, K.H. Analysis of a station-keeping maneuver strategy for collocation of three geostationary satellites. Control Eng. Pract. 1999, 7, 1153–1161. [Google Scholar] [CrossRef]
- Shrivastava, S.K. Orbital perturbations and stationkeeping of communication satellites. J. Spacecr. Rocket. 1978, 15, 67–78. [Google Scholar] [CrossRef]
- Slavinskas, D.; Dabbaghi, H.; Benden, W.; Johnson, G. Efficient inclination control for geostationary satellites. J. Guid. Control Dyn. 1988, 11, 584–589. [Google Scholar] [CrossRef]
- Jahn, R.G. Electric propulsion. Am. Sci. 1964, 52, 207–217. [Google Scholar]
- Yang, G. Earth-moon trajectory optimization using solar electric propulsion. Chin. J. Aeronaut. 2007, 20, 452–463. [Google Scholar] [CrossRef] [Green Version]
- Yang, D.; Xu, B.; Zhang, L. Optimal low-thrust spiral trajectories using Lyapunov-based guidance. Acta Astronaut. 2016, 126, 275–285. [Google Scholar] [CrossRef]
- Takei, Y.; Saiki, T.; Yamamoto, Y.; Mimasu, Y.; Takeuchi, H.; Ikeda, H.; Ogawa, N.; Terui, F.; Ono, G.; Yoshikawa, K.; et al. Hayabusa2’s station-keeping operation in the proximity of the asteroid Ryugu. Astrodynamics 2020, 4, 349–375. [Google Scholar] [CrossRef]
- Feuerborn, S.A.; Perkins, J.; Neary, D.A. Finding a way: Boeing’s all electric propulsion satellite. In Proceedings of the 49th AIAA/ASME/SAE/ASEE Joint Propulsion Conference, San Jose, CA, USA, 14–17 July 2013; p. 4126. [Google Scholar]
- Jahn, R.G. Physics of Electric Propulsion; Courier Corporation: Honolulu, HI, USA, 2006. [Google Scholar]
- Hofer, R. High-specific impulse operation of the BPT-4000 Hall thruster for NASA science missions. In Proceedings of the 46th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Nashville, TN, USA, 25–28 July 2010; p. 6623. [Google Scholar]
- Sankovic, J.M.; Hamley, J.A.; Haag, T.W. Performance evaluation of the Russian SPT-100 thruster at NASA LeRC. In Proceedings of the IEPC Conference, Seattle, WA, USA, 13–14 September 1993. [Google Scholar]
- Valentian, D.; Maslennikov, N. The PPS 1350 program. CP IEPC 1997, 97, 855–861. [Google Scholar]
- Oleson, S.R.; Myers, R.M.; Kluever, C.A.; Riehl, J.P.; Curran, F.M. Advanced propulsion for geostationary orbit insertion and north-south station keeping. J. Spacecr. Rocket. 1997, 34, 22–28. [Google Scholar] [CrossRef] [Green Version]
- Gomes, V.M.; Prado, A.F. Low-thrust out-of-plane orbital station-keeping maneuvers for satellites. Math. Probl. Eng. 2012, 2012, 532708. [Google Scholar] [CrossRef] [Green Version]
- Gazzino, C.; Arzelier, D.; Losa, D.; Louembet, C.; Pittet, C.; Cerri, L. Optimal control for minimum-fuel geostationary station keeping of satellites equipped with electric propulsion. IFAC-PapersOnLine 2016, 49, 379–384. [Google Scholar] [CrossRef]
- Gazzino, C.; Arzelier, D.; Cerri, L.; Losa, D.; Louembet, C.; Pittet, C. A three-step decomposition method for solving the minimum-fuel geostationary station keeping of satellites equipped with electric propulsion. Acta Astronaut. 2019, 158, 12–22. [Google Scholar] [CrossRef] [Green Version]
- Gazzino, C.; Louembet, C.; Arzelier, D.; Jozefowiez, N.; Losa, D.; Pittet, C.; Cerri, L. Integer programming for optimal control of geostationary station keeping of low-thrust satellites. IFAC-PapersOnLine 2017, 50, 8169–8174. [Google Scholar] [CrossRef]
- Gazzino, C.; Arzelier, D.; Louembet, C.; Cerri, L.; Pittet, C.; Losa, D. Long-term electric-propulsion geostationary station-keeping via integer programming. J. Guid. Control Dyn. 2019, 42, 976–991. [Google Scholar] [CrossRef]
- De Bruijn, F.J.; Theil, S.; Choukroun, D.; Gill, E. Geostationary satellite station-keeping using convex optimization. J. Guid. Control Dyn. 2016, 39, 605–616. [Google Scholar] [CrossRef] [Green Version]
- Min, W.; Qiang, L.; Xingang, L.; Ran, A. Electric Thrusters Configuration Strategy Study on Station-Keeping and Momentum Dumping of GEO Satellite. In Proceedings of the 2019 5th International Conference on Control Science and Systems Engineering (ICCSSE), Shanghai, China, 14–16 August 2019; pp. 115–121. [Google Scholar]
- Guelman, M.M. Geostationary satellites autonomous closed loop station keeping. Acta Astronaut. 2014, 97, 9–15. [Google Scholar] [CrossRef]
- Ruiz, J.L.; Frey, C.H. Geosynchronous satellite use of GPS. In Proceedings of the 18th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2005), Long Beach, CA, USA, 13–16 September 2005; pp. 1227–1232. [Google Scholar]
- Yang, W.; Li, S. A station-keeping control method for GEO spacecraft based on autonomous control architecture. Aerosp. Sci. Technol. 2015, 45, 462–475. [Google Scholar] [CrossRef]
- Park, B.K.; Tahk, M.J.; Bang, H.C.; Park, C.S.; Jin, J.H. A new approach to on-board stationkeeping of geo-satellites. Aerosp. Sci. Technol. 2005, 9, 722–731. [Google Scholar] [CrossRef]
- Garcia, C.E.; Prett, D.M.; Morari, M. Model predictive control: Theory and practice-A survey. Automatica 1989, 25, 335–348. [Google Scholar] [CrossRef]
- Weiss, A.; Di Cairano, S. Opportunities and potential of model predictive control for low-thrust spacecraft station-keeping and momentum-management. In Proceedings of the 2015 European Control Conference (ECC), Linz, Austria, 15–17 July 2015; pp. 1370–1375. [Google Scholar]
- Weiss, A.; Kalabić, U.; Di Cairano, S. Model predictive control for simultaneous station keeping and momentum management of low-thrust satellites. In Proceedings of the 2015 American Control Conference (ACC), Chicago, IL, USA, 1–3 July 2015; pp. 2305–2310. [Google Scholar]
- Walsh, A.; Di Cairano, S.; Weiss, A. MPC for coupled station keeping, attitude control, and momentum management of low-thrust geostationary satellites. In Proceedings of the 2016 American Control Conference (ACC), Boston, MA, USA, 6–8 July 2016; pp. 7408–7413. [Google Scholar]
- Weiss, A.; Kalabić, U.V.; Di Cairano, S. Station keeping and momentum management of low-thrust satellites using MPC. Aerosp. Sci. Technol. 2018, 76, 229–241. [Google Scholar] [CrossRef]
- Caverly, R.J.; Di Cairano, S.; Weiss, A. Electric Satellite Station Keeping, Attitude Control, and Momentum Management by MPC. IEEE Trans. Control Syst. Technol. 2020, 29, 1475–1489. [Google Scholar] [CrossRef]
- Zou, H.; Song, J.; Wang, J.; Zhang, L.; Huang, Y. Geostationary Station Keeping Using Relative Orbital Elements with Model Predictive Control. In Proceedings of the 2020 Chinese Control And Decision Conference (CCDC), Hefei, China, 22–24 August 2020; pp. 4437–4442. [Google Scholar]
- Boniface, C.; Charbonnier, J.M.; Lefebvre, L.; Leroi, V.; Lienart, T. An overview of electric propulsion activities at CNES. In Proceedings of the 35th International Electric Propulsion Conference, Atlanta, GA, USA, 8–12 October 2017. [Google Scholar]
- Sembély, X.; Wartelski, M.; Doubrère, P.; Deltour, B.; Cau, P.; Rochard, F. Design and Development of an Electric Propulsion Deployable Arm for Airbus Eurostar E3000 ComSat Platform. In Proceedings of the 35th International Electric Propulsion Conference, Atlanta, GA, USA, 8–12 October 2017. [Google Scholar]
- Curtis, H. Orbital Mechanics for Engineering Students; Butterworth-Heinemann: Oxford, UK, 2013. [Google Scholar]
- De Ruiter, A.H.; Damaren, C.; Forbes, J.R. Spacecraft Dynamics and Control: An Introduction; John Wiley & Sons: Hoboken, NJ, USA, 2012. [Google Scholar]
- Walker, M.; Ireland, B.; Owens, J. A set modified equinoctial orbit elements. Celest. Mech. 1985, 36, 409–419. [Google Scholar] [CrossRef]
- Li, L.; Zhang, J.; Zhao, S.; Qi, R.; Li, Y. Autonomous onboard estimation of mean orbital elements for geostationary electric-propulsion satellites. Aerosp. Sci. Technol. 2019, 94, 105369. [Google Scholar] [CrossRef]
- Boyd, I.D. Numerical modeling of spacecraft electric propulsion thrusters. Prog. Aerosp. Sci. 2005, 41, 669–687. [Google Scholar] [CrossRef]
- Bazaraa, M.S.; Sherali, H.D.; Shetty, C.M. Nonlinear Programming: Theory and Algorithms; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]
- Sahin, K.H.; Ciric, A.R. A dual temperature simulated annealing approach for solving bilevel programming problems. Comput. Chem. Eng. 1998, 23, 11–25. [Google Scholar] [CrossRef]
- Mooney, C.Z. Monte Carlo Simulation; Sage: New York, NY, USA, 1997; Number 116. [Google Scholar]
- Xiong, Z.; Qiao, L.; Liu, J.; Jiang, B. GEO satellite autonomous navigation using X-ray pulsar navigation and GNSS measurements. Int. J. Innov. Comp. Inform. Control 2012, 8, 2965–2977. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Level | ||||
|---|---|---|---|---|
| Weak | ||||
| Normal | ||||
| Strong |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, C.; Xu, B.; Zhou, W.; Peng, Q. Geostationary Station-Keeping of Electric-Propulsion Satellite Equipped with Robotic Arms. Aerospace 2022, 9, 182. https://doi.org/10.3390/aerospace9040182
Li C, Xu B, Zhou W, Peng Q. Geostationary Station-Keeping of Electric-Propulsion Satellite Equipped with Robotic Arms. Aerospace. 2022; 9(4):182. https://doi.org/10.3390/aerospace9040182
Chicago/Turabian StyleLi, Chengzhang, Bo Xu, Wanmeng Zhou, and Qibo Peng. 2022. "Geostationary Station-Keeping of Electric-Propulsion Satellite Equipped with Robotic Arms" Aerospace 9, no. 4: 182. https://doi.org/10.3390/aerospace9040182