4.1. Optimal Design of Satellite Body
Figure 2 shows the specific ideas and methods used to optimize the stealth satellite. Firstly, the four-sided cone configuration with symmetric structure is obtained by referring to the stealth configuration of TX-1, and then the number of edges of the symmetric cone is increased to eight and ten edges, as shown in
Figure 2. Finally, using the idea of limit, the number of edges is taken to be large enough to obtain the final optimized configuration (olive).
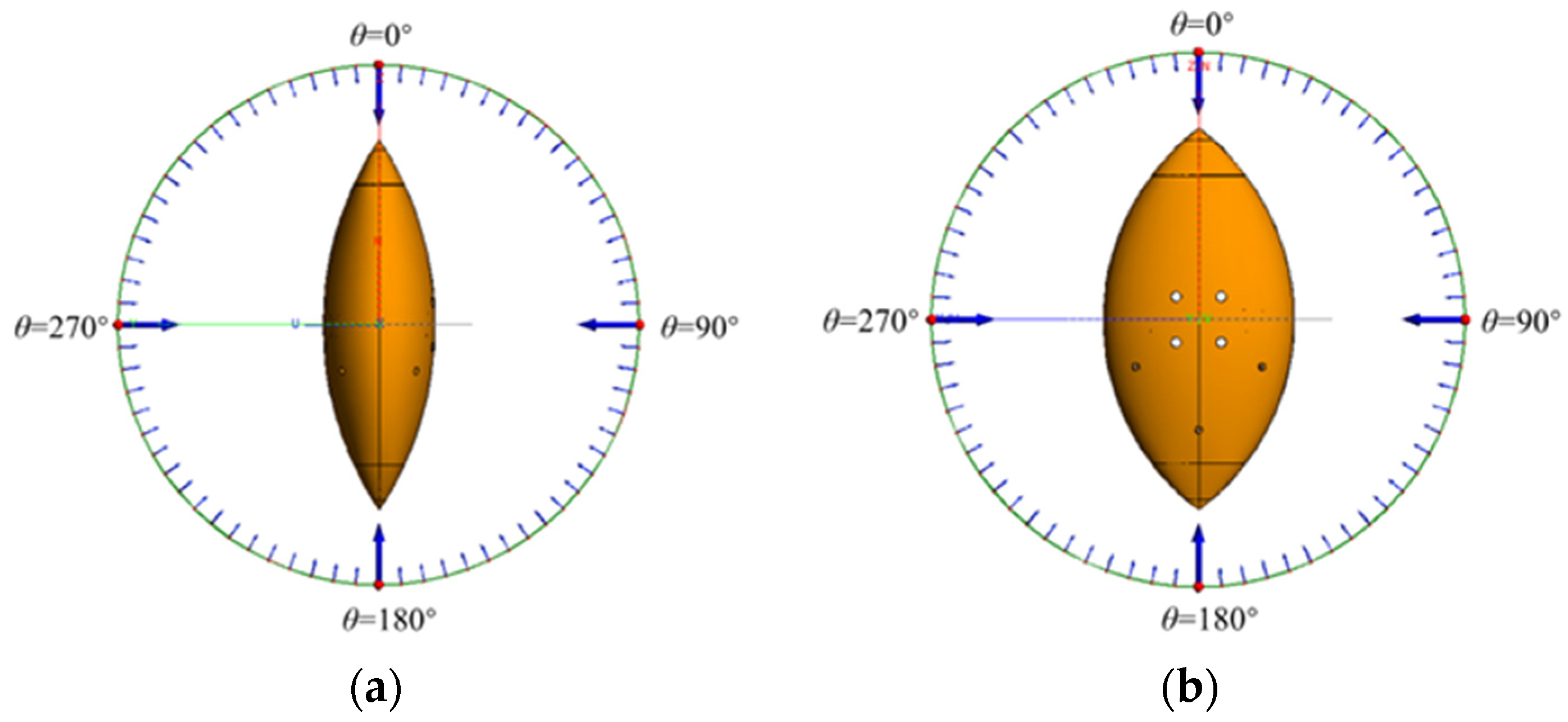
Olive-A can be divided into stealthy and non-stealthy attitudes, as shown in
Figure 3. The Olive-B is a highly symmetric rotating body with the same RCS distribution curve in all directions, so it can achieve omnidirectional stealth and there is no difference between stealth and non-stealth attitudes.
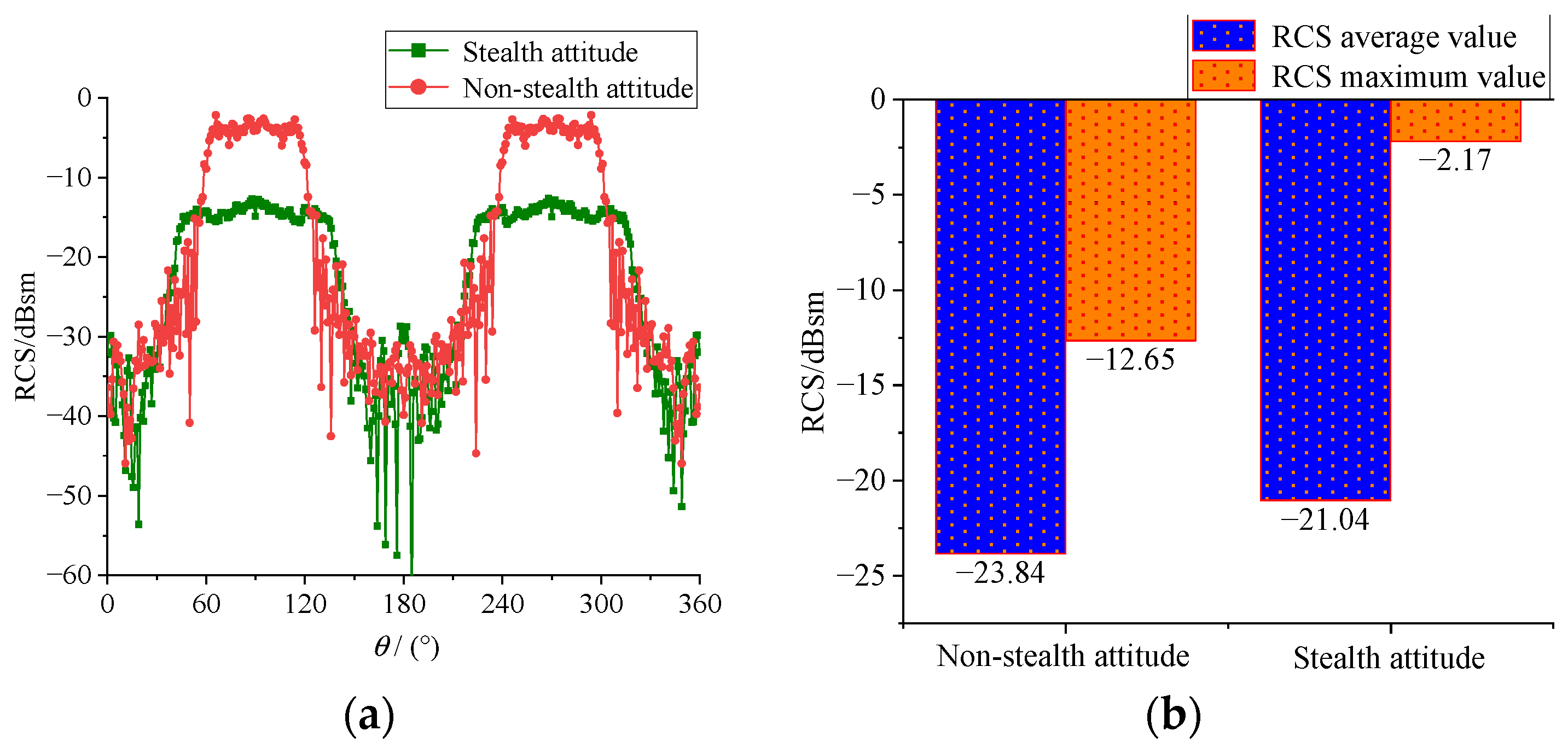
From the simulation results in
Figure 4, it is easy to see that the RCS in the non-stealth attitude of the Olive configuration A is about 10 dBsm higher than that of the stealth attitude in the angular domains of 60–120° and 240–300°, while the difference in the RCS in the other angular domains is very small. In fact, the stealth performance of the satellite decreases when the incident radar wave gradually deviates from the stealth attitude and reaches the worst performance when it reaches the non-stealth attitude.
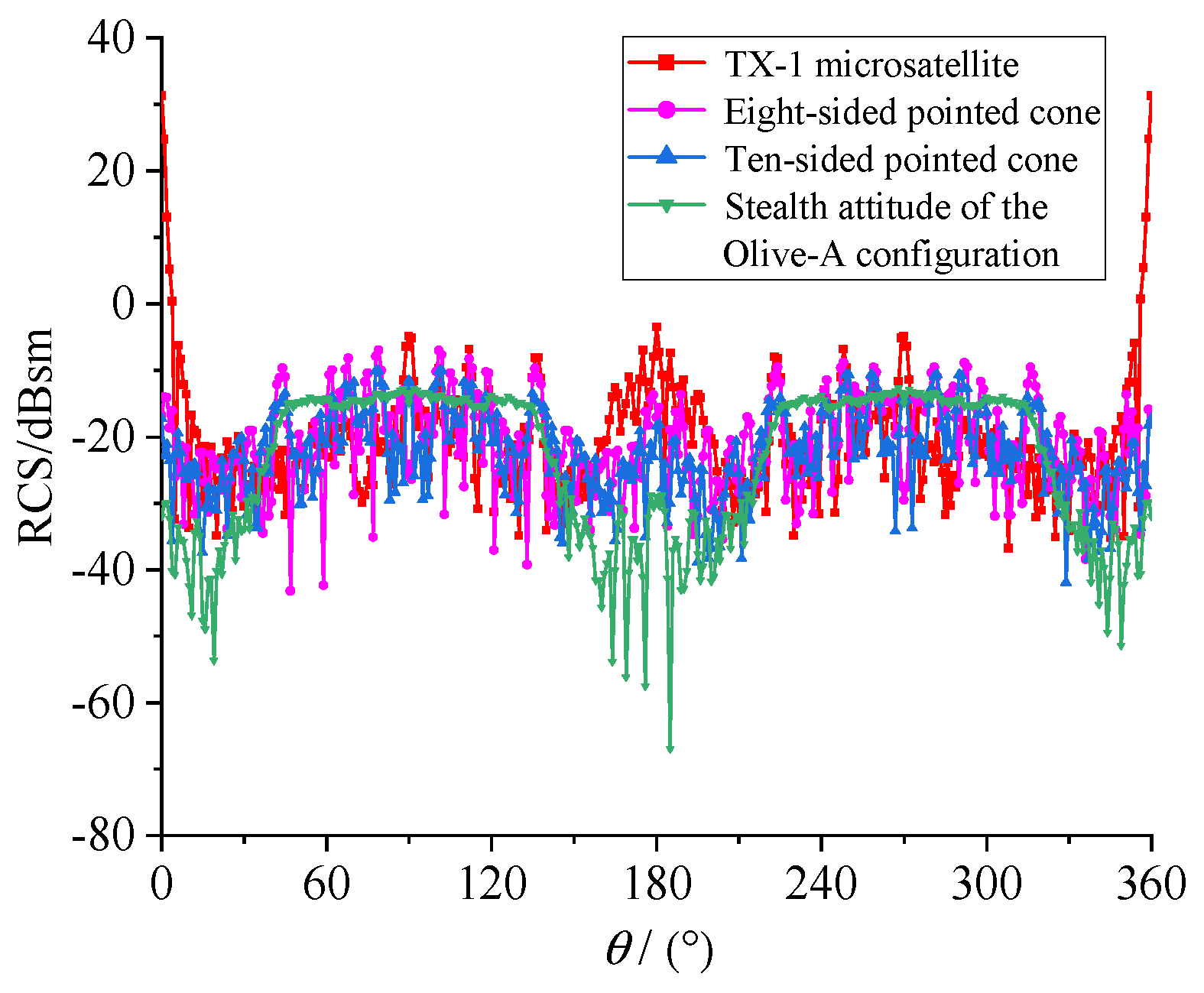
To verify the feasibility of the optimization method in
Figure 2, the central frequency point of the X-band is selected to analyze TX-1, the eight-sided pointed cone, the ten-sided pointed cone, and the stealth attitude of Olive-A configuration. The comparison of the RCS numerical calculation results of the four stealth configurations at the X-band (10 GHz) is given below.
From
Figure 5 and
Table 2, it is easy to find that the pattern is very obvious in the X-band; the stealth performance of the four configurations is Olive > ten-sided cone > eight-sided cone > TX-1, both in terms of RCS mean and RCS maximum. The arithmetic mean and maximum values of RCS of the Olive configuration are lower than those of the TX-1 by 3.65 dB and 43.97 dB, respectively, while the RCS reduction in the ten-sided cone is better than that of the eight-sided cone. This again confirms the correctness and feasibility of the optimized design method in
Figure 2. In addition, the RCS distribution of the Olive configuration is very gentle in the symmetric angular domain centered at 90° and 270°, while the RCS curves of the other three configurations oscillate strongly and have more scattering peaks, which is extremely unfavorable for the stealthy configuration design.
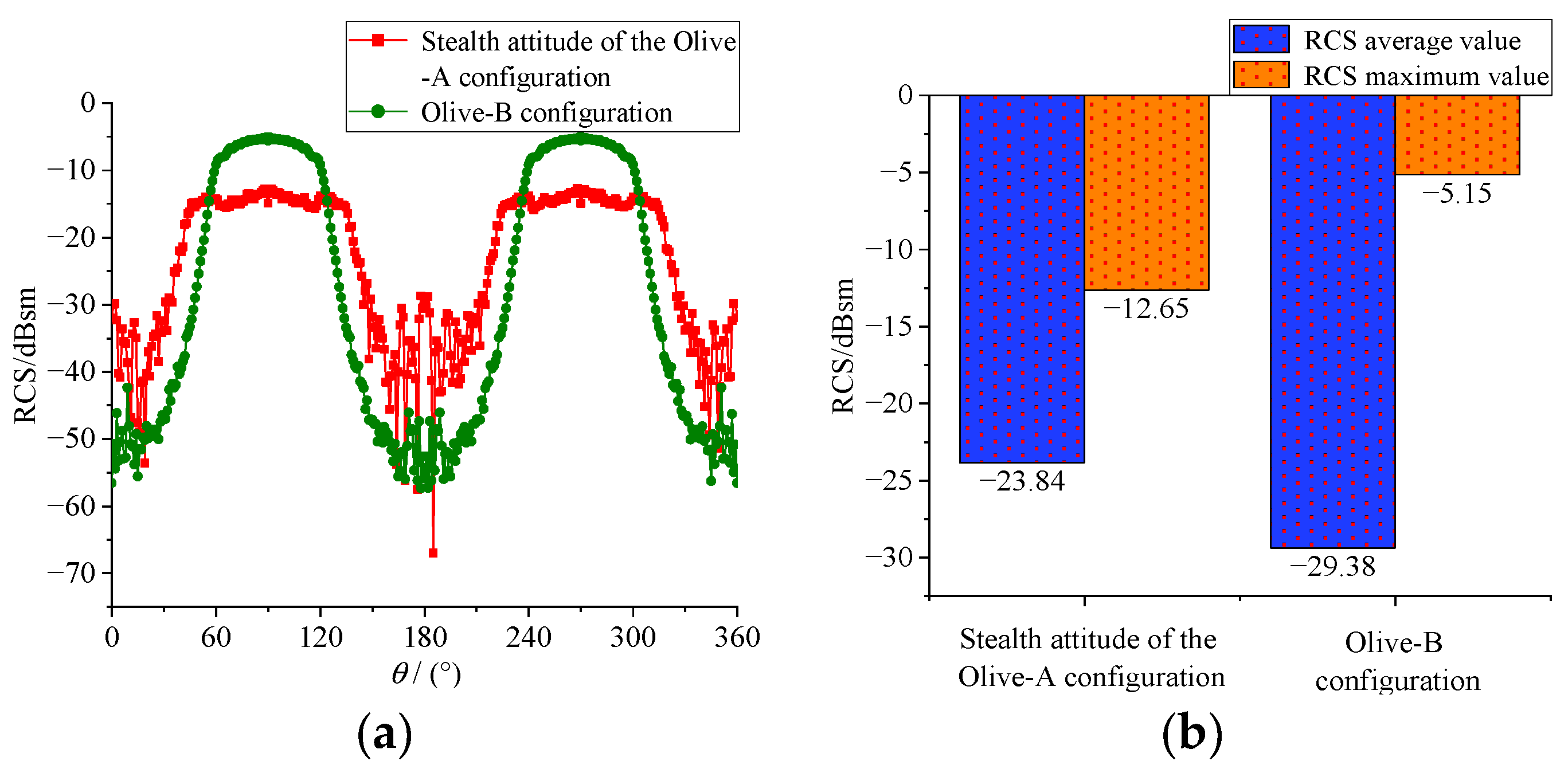
In order to be able to deal with threats from both space-based and ground-based radar detection systems when the satellite is in orbit, it is necessary to make the satellite configuration as omnidirectional as possible to achieve stealth. Although the difference between the mean RCS values in the non-stealthy and stealthy attitudes of Olive-A is small, the configuration can be further optimized to improve the omnidirectional stealth performance. The RCS comparison between the stealth attitude of Olive-A and the optimized Olive-B at 10 GHz is given in
Figure 6.
From
Figure 6, it can be seen that although the scattering characteristics of the two stealth configurations are relatively similar, there are some significant differences. The RCS of the Olive-B configuration is lower than the stealth attitude of the Olive-A configuration in all angular domains beyond 56 to 123° and 236 to 304°. Specifically, the RCS amplitude of the Olive-B configuration is higher than that of the stealth attitude of the Olive-A configuration, but its RCS mean value is lower than that of the stealth attitude of the Olive-A configuration by 5.54 dBsm, and the RCS mean value reduction effect is significant.
From the above analysis, it is easy to find that the RCS mean value of the stealth attitude with the best stealth effect of the Olive-A configuration is still inferior to that of the Olive-B configuration. When the incident wave gradually deviates from the stealth attitude, the RCS mean value of the Olive-A configuration will continue to increase, and the stealth performance gap between it and the Olive-B configuration will be even larger. In summary, since the omnidirectional stealth performance of the Olive-B configuration is significantly better than that of the Olive-A configuration, the Olive-A configuration is eliminated and the Olive-B configuration is determined as the final stealth configuration of the satellite.
4.2. Olive-B Configuration Satellite Anechoic Chamber Test Verification
As shown in
Figure 7, this RCS test system consists of an anechoic chamber, transmitting and receiving antennas, a turntable, a vector network analyzer, a low-noise amplifier, and a target to be tested.
It should be noted that the length, width, and height in
Table 3 refer to the dimensions of the Olive-B; the antenna gain and flap width vary with frequency, and the values given in
Table 3 are at 10 GHz.
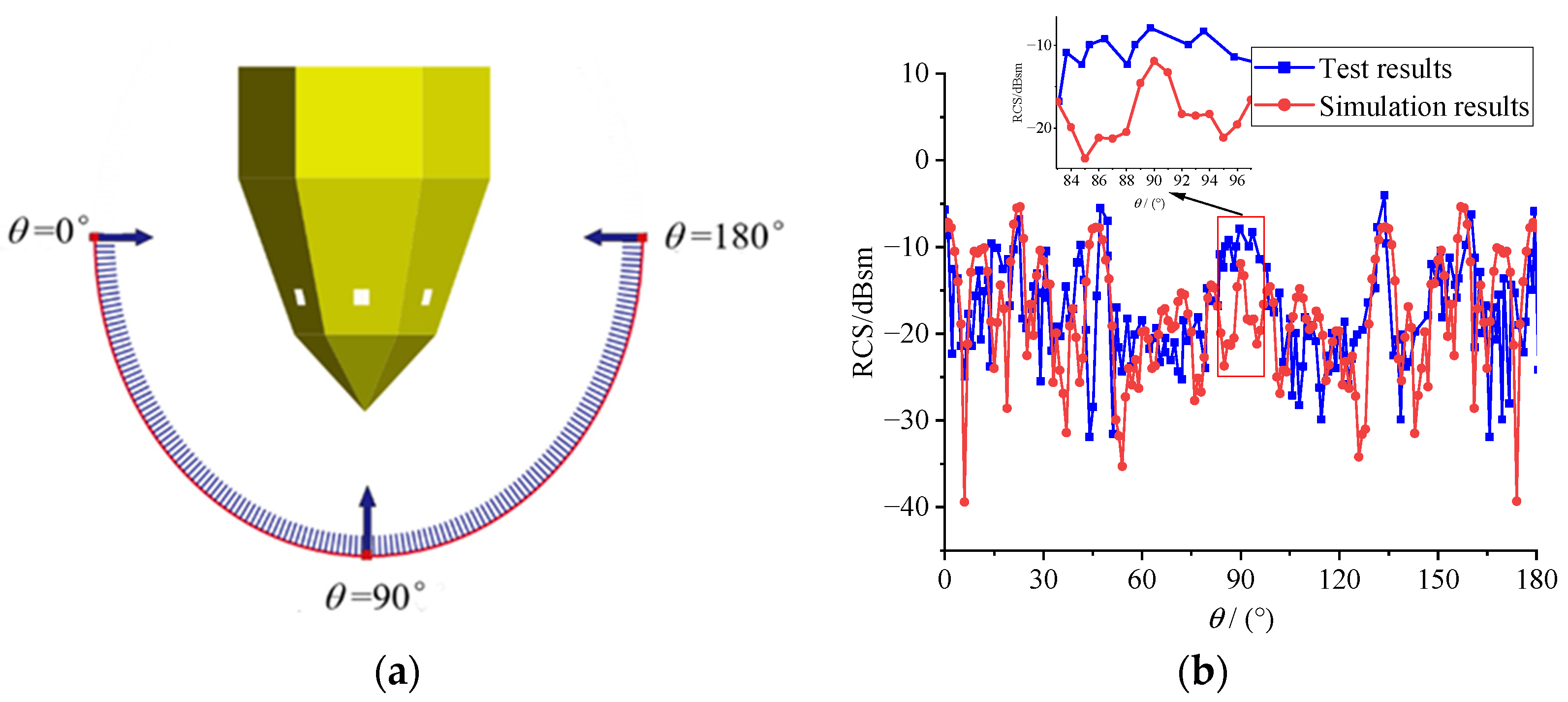
The radar band for the electromagnetic test and simulation is set to the X-band and the polarization form is VV polarization. The comparison of the test and simulation results of the anechoic chamber of the Olive satellite is given in
Figure 8. It is easy to see from the figure that the simulation results are lower than the test results in the angular domain near the tips of both sides of the satellite because the spire diffraction is the main contribution to the RCS of the Olive satellite; however, the physical optics method cannot calculate the contribution of the diffraction wave to the scattering well. The mean RCS values obtained from the simulation and test of the Olive satellite in the angular domain of 60–120° (another symmetric angular domain is 240–300°) are −6.34 dBsm and −12.97 dBsm, respectively, with a difference of 6.63 dBsm.
As for the RCS error of 60–120°, the main reason is still caused by placement error and is “quasi-monostatic”. It is almost impossible to keep the central axis of the Olive-B and the horn at the same level. As long as there is a slight error in the height of the horn and the olive, the result of the test will be small because the RCS is only the largest if the incident is along the central axis of the olive.
Another important reason is the “quasi-monostatic”. The simulation is that the receive and transmit antennas are the same antenna, which is ideal. Additionally, the test is to put two antennas close together to approximate a monostatic mode. However, there is a difference between this and ideal simulation. Of course, this is also the main reason why RCS deviates within 60–120°. In fact, within 60–120°, the RCS error is only a few dBsm, which is completely acceptable for olive with RCS fluctuation ranges of more than five orders of magnitude (−55–5 dBsm).
Although the agreement between the RCS anechoic chamber test and simulation results of the Olive-B satellite is not as good as that of TX-1, the trends of the two are still highly consistent.
4.3. Stealth Design of Satellite Solar Array
For the Olive-B satellite, a fan-shaped solar array is designed, as shown in
Figure 9; the solar array can be optionally deployed from the satellite or retracted into the satellite according to the satellite mission needs. When the fan-shaped solar array is deployed above the satellite, it is difficult for the ground-based radar to transmit radar waves directly to the solar array surface because the satellite is blocking the solar array. In addition, the fan-shaped solar array can be rotated around the yellow axis, and the size and deployment height of the solar array can be flexibly adjusted according to the requirements.
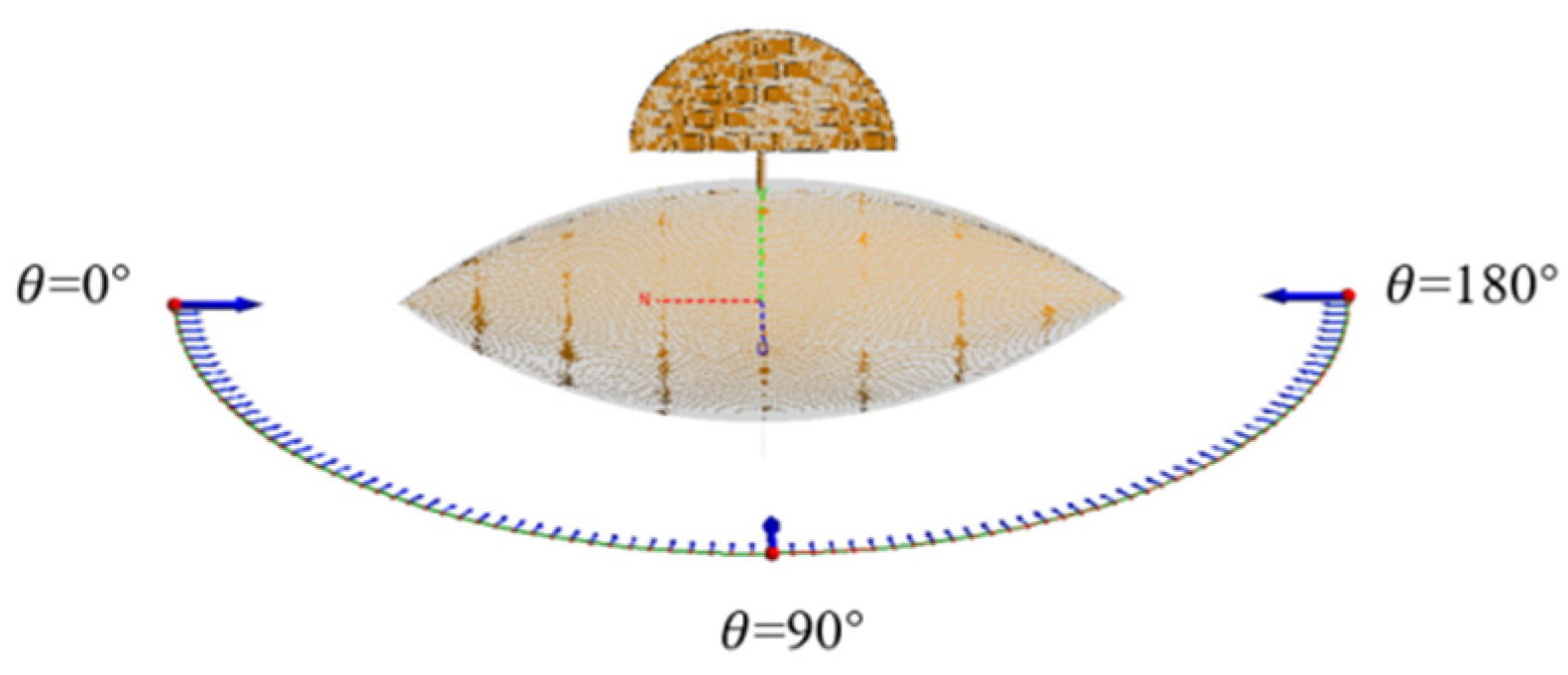
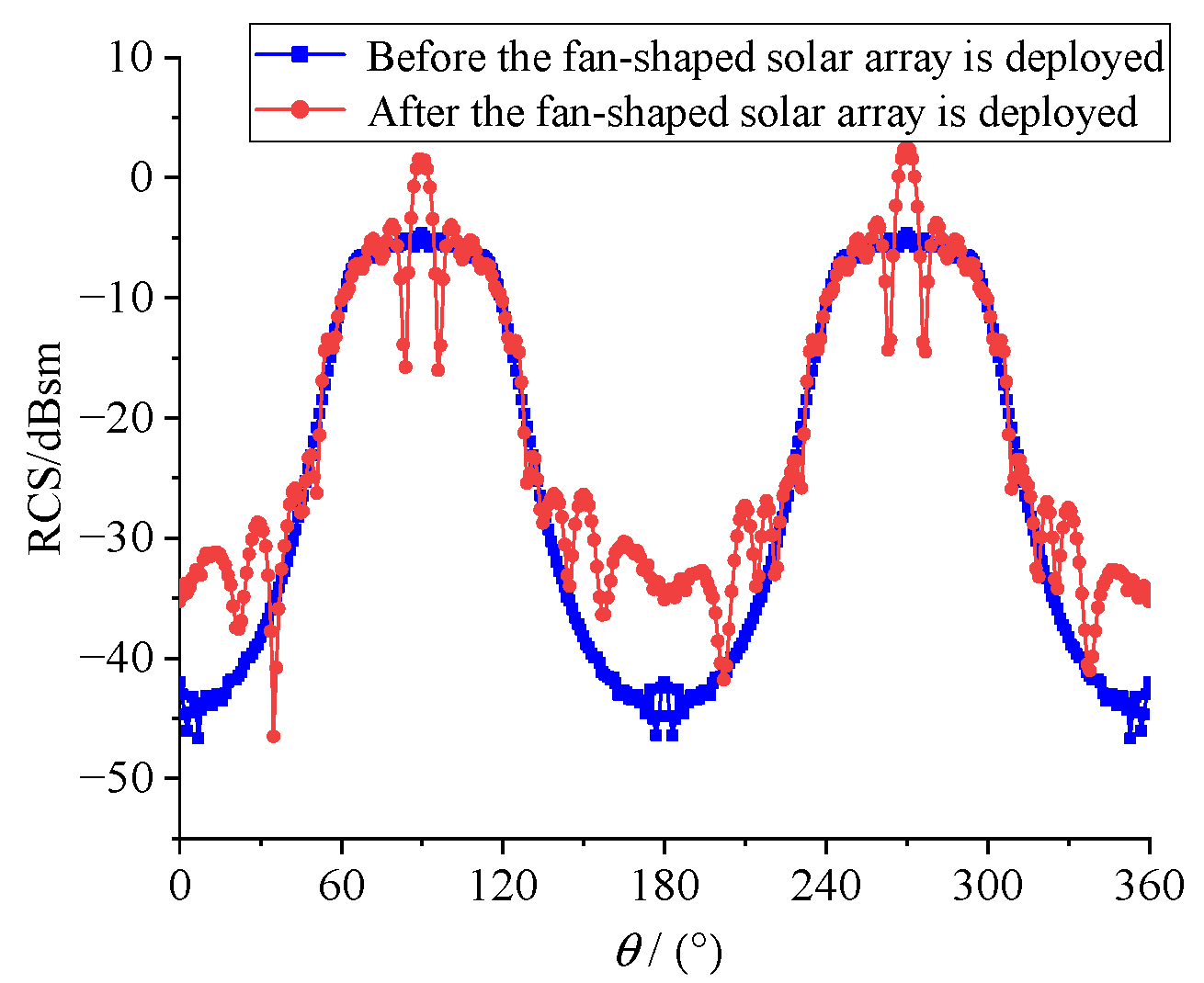
In order to study the RCS variation in the satellite before and after the sector solar array deployment, the schematic of the incident wave after the solar array deployment and the RCS comparison before and after the satellite solar array deployment are given in
Figure 10 and
Figure 11, respectively, with an incidence frequency of 4 GHz, VV polarization, and circumferential incidence.
After the deployment of the fan-shaped solar array, the backscattering becomes significantly stronger when the radar wave is vertically incident the combination of the solar array and the satellite, resulting in an increase in RCS from −4.63 dBm to 2.57 dBsm, an increase of 7.2 dBsm. In addition, RCS in the angular domain around 180° also rises to a certain extent, which is the contribution of specular reflection and edge diffraction of the solar array, and the RCS in the remaining angular domain basically overlaps. It can be seen that although the fan-shaped solar array increases the RCS in the small angle domain, the damage to the overall stealth performance of the satellite is small, and due to the covering of the solar array by the satellite, the ground-based radar wave within a certain angle range cannot be directly incident into the fan-shaped solar array, which has certain advantages over the traditional solar array in terms of configuration stealth.
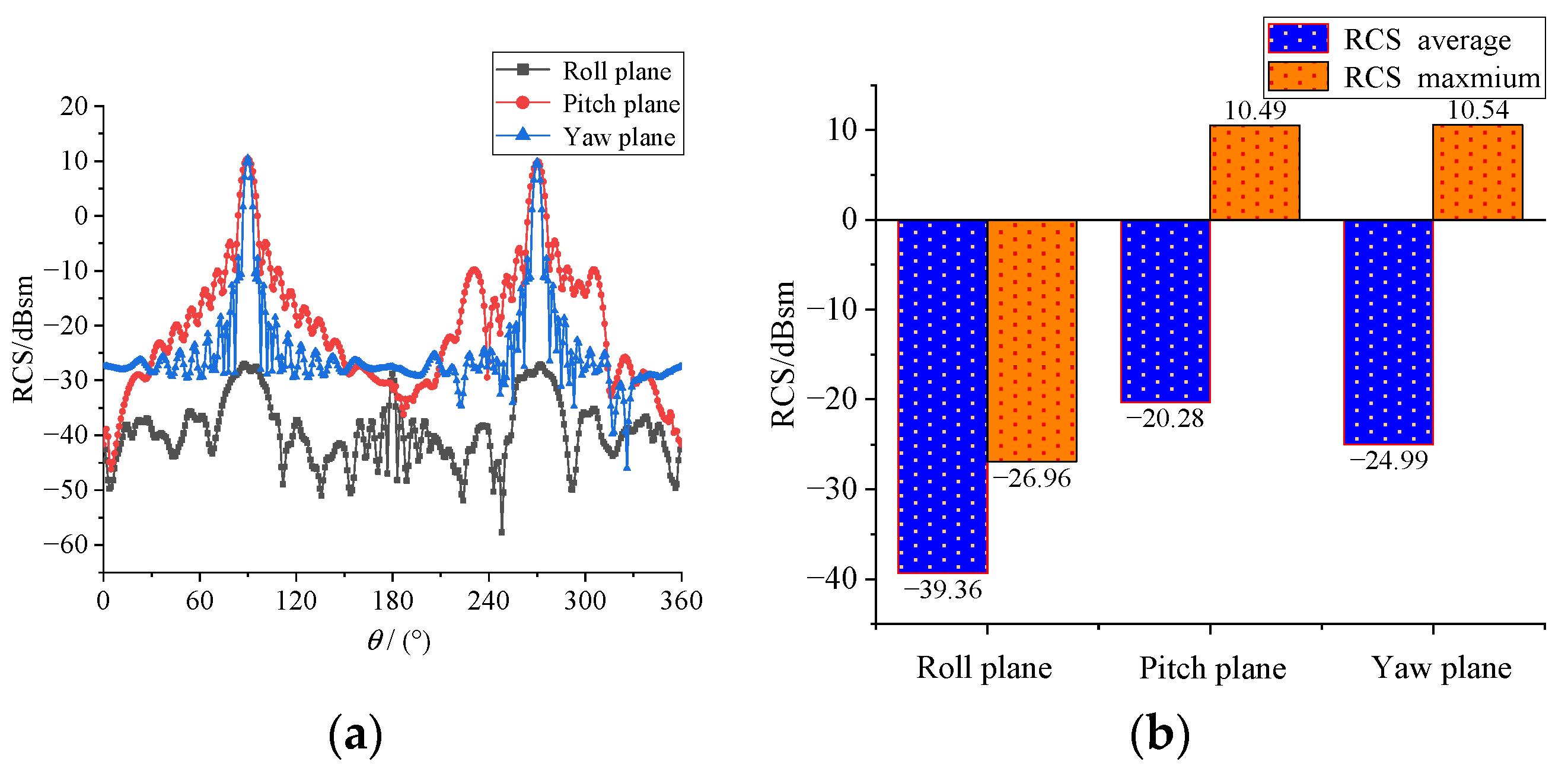
Figure 12 is a schematic diagram of the radar wave incident on the isolated solar array model from three typical azimuths. The three incident azimuths are the roll plane, the pitch plane, and the yaw plane.
Figure 13 shows the RCS distribution characteristics of the fan-shaped solar array on the roll plane, the pitch plane, and the yaw plane.
The RCS characteristics of the pitch and yaw planes are similar, the RCS of the two scattering main flaps (90 and 270°) are both 10.5 dBsm, and their RCS is mainly contributed to by the specular reflection from the solar array surface. The RCS of the roll plane is contributed to by the very weak specular reflection at the edge of the solar array and the creeping wave diffraction of the rotating axis; its overall RCS is below −30 dBsm and the average RCS value is only −39.36 dBsm, which is lower than that of the pitch and yaw planes by 19.08 dBsm and 14.37 dBsm, respectively. The RCS of the three typical detection azimuths is quite different, the stealth performance of the roll plane is the best, the yaw plane is the second, and the pitch plane is the worst.
The fan-shaped solar array can be rotated at any angle through the rotating shaft.
Figure 14 shows the three-dimensional model of the satellite when the solar array rotates to three typical positions. In order to explore the influence of the solar array rotation angle on the satellite RCS characteristics,
Figure 15 shows the comparison of satellite RCS characteristics under three different rotation angles.
The analysis of
Figure 15a shows that the position of the main scattering flap of the RCS characteristic curve changes due to the change of the direction of the solar array specular reflection caused by the solar array rotation. In other words, when the solar array rotates by a certain angle, the RCS distribution curve of the satellite is shifted to the right by a certain angle, but this overall shift is not exactly “copied”, and there are still a few angular areas where the RCS is different. It can be seen from
Figure 15b that the stealth performance of the satellite gradually decreases as the rotation angle increases. From the position of the solar array rotating 0° to the position of rotation 90°, the mean value of satellite RCS increases from −21.41 dBsm to −16.35 dBsm; the increase is 5.06 dBsm. Therefore, the stealth performance of the satellite configuration in
Figure 14a is better than that in
Figure 14b,c, and thus the satellite should keep the solar array in the attitude of
Figure 14a as much as possible when it is in orbit.
4.4. Radar Maximum Detection Distance Analysis
The maximum detection distance of the radar is proportional to the fourth root of the target RCS, so reducing the target RCS can reduce the detection distance of the radar and reduce the probability of the target being detected by the radar. The probability of target detection by radar is closely related to the size of the target’s own RCS, the distance from the radar, and other factors. The calculation formula for the probability of target detection by Doppler radar search is:
where
is the probability of the radar finding the target,
is the antenna scanning angular velocity,
is the individual pulse signal-to-noise ratio,
is the radar horizontal flap width,
is the radar pulse repetition frequency,
is the radar transmit power,
is the antenna gain,
is the arithmetic mean of the RCS,
is the compression ratio of the pulse,
is the Boltzmann constant with the value of 1.38 × 10
−23 W × s/K,
is the standard room temperature 290 K,
is the receiver noise bandwidth,
is the receiver noise factor,
is the total system loss, and
is the maximum distance at which a pulse Doppler radar can detect a target.
The relevant data of a pulse Doppler radar selected for the calculation in this section are shown in
Table 4 [
19,
20].
During the orbital flight of the stealth satellite, its position and attitude change relative to the direction of the ground-based and space-based detection radar; the RCS will rise or decrease, and the maximum dangerous distance detected by the radar will also change accordingly. In this section, four different observation directions of stealth satellites are selected for the study.
Figure 16 gives the probability distribution of three stealth satellites being detected by a certain pulsed Doppler radar under the X-band (10 GHz) in the −30° ≤
≤ 30°, 150° ≤
≤ 210°, 60° ≤
≤ 120°, and 0° ≤
≤ 360°. The horizontal coordinates indicate the maximum distance that the radar can detect from our satellite, and the vertical coordinates indicate the probability of the satellite being detected by the radar.
As the radar detection distance decreases, the probability of a satellite being detected by radar increases, which means that the closer the radar is to the detected target within the maximum detection distance, the greater the probability of the target being detected. The maximum radar detection distance of Olive-B is the lowest, compared with the other two stealth satellites in the spaceward, groundward, and omnidirectional angular domains. All three stealth configurations (including Olive-A stealth and non-stealth attitudes) have a low probability of being detected by enemy radars; the maximum radar detection distance is below 20 km and the difference between the maximum radar detection distances of the three satellites is small. Unlike the other three detection directions, the maximum radar detection distance of TX-1 is the smallest in the lateral angle domain, and the radar detection distance of different stealth configurations of satellites varies greatly, especially given the maximum detection distance of non-stealth attitude of Olive-A configuration is significantly higher than the other three stealth satellites.
Figure 17 gives a comparison of the maximum radar detection distances of the three stealth satellites at a detection probability of 10% under the X-band radar (10 GHz), where the Olive-A configuration is only taken in its stealthy attitude. The maximum distances detected by radar in the spaceward, groundward, lateral, and omnidirectional directions for the Olive-B configuration are 58.68%, 46.59%, 98.17%, and 67.03% of those for the Olive-A configuration and 24.40%, 15.73%, 200.37%, and 58.35% of those for the TX-1, respectively. This indicates that the application of radar stealth technology can effectively reduce the maximum radar detection distance of the satellite and improve the satellite’s in-orbit survivability and operational effectiveness.
The maximum radar detection distance of the satellite is also closely related to the frequency size of the radar wave. In this section, six different frequencies of radar waves from L-band to Ku-band are selected to study the effect of frequency size on the maximum radar detection distance.
Figure 18 shows the probability distribution of three kinds of stealth satellites detected by the enemy radar detection system under the incidence of radar waves of different frequencies.
Table 5 shows the comparison of the maximum detection distances of the three kinds of stealth satellites when the pulse Doppler radar finds the target with a probability of 10%. It can be seen that:
- (1)
The probabilities of the three stealth satellites being detected by enemy radars at different frequencies are also quite different. Among them, the L-band has the highest probability of being detected by the radar, and the C, X, and Ku-bands have a higher probability of being detected by the radar.
- (2)
The probability of different satellite stealth configurations being detected by radar is affected differently by the frequency. The probability of the multi-faceted stealth configuration (TX-1) being detected by radar will change significantly with the increase in frequency, while the two Olive configurations are less affected by frequency, especially the Olive-B configuration.
- (3)
Under the irradiation of a certain pulse Doppler radar of six frequencies with a probability of finding a target of 10%, the radar maximum detection distance of TX-1 reaches a maximum of 61.91 km at 1 GHz (L-band), and at 10 GHz (X-band) the minimum value is 13.52 km. The radar maximum detection distance of the Olive-A configuration non-stealth attitude reaches a maximum value of 48.10 km at 1 GHz (L-band) and a minimum value of 9.28 km at 16 GHz (Ku-band). The radar maximum detection distance in the stealth attitude of Olive-A configuration reaches a maximum value of 40.95 km at 1 GHz (L-band) and a minimum value of 8.14 km at 13 GHz (Ku-band). The radar maximum detection range of the Olive-B configuration reaches a maximum of 24.80 km at 1 GHz (L-band) and a minimum of 6.27 km at 16 GHz (Ku-band). The radar maximum detection distance of the Olive-B obtained by configuration optimization is smaller than that of the other two stealth configurations in each frequency band, and it generally shows a downward trend with the increase in the incident wave frequency. To sum up, the stealth performance of satellites at high frequencies is better than that at low frequencies, which also shows that how to deal with threats from low-frequency and long-range early warning radars is the key to improving the in-orbit survivability of olive stealth satellites.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}