1. Introduction
Cooperative engagement in multimissile formations is an important means of warfare adapted to future combat environments. In a multimissile formation, multiple missiles are integrated into a combat group using information sharing, complementary functions, and tactical coordination through coordination among the missiles. The resulting group advantage can be used to attack defence systems and targets at multiple levels and in all directions, achieving overall improvement in penetration capabilities [
1,
2]. At present, research on the cooperative engagement of missile formations is mainly concerned with issues related to the coordination of control [
3,
4,
5], guidance [
6,
7], mission planning issues [
8,
9], etc. However, few studies concerning effectiveness indicators for cooperative engagement involving missile formations have been published.
The combat effectiveness of a missile refers to a comprehensive evaluation of the effectiveness it can achieve when completing a specified combat mission under specific circumstances and conditions. Currently, the effectiveness of missiles can be assessed through expert evaluations, test statistics, or combat simulation methods. Combat effectiveness can also be evaluated using analytical methods, such as analogue-to-digital converters (ADCs) [
10,
11,
12], neural networks [
13,
14], and fuzzy evaluation methods [
15]. To address the issues of the intense infrared radiation produced during missile launch, the poor continuous combat capability of a missile system, the severe ablation of the launcher, and environmental pollution, refs. [
10,
11] established an improved effectiveness evaluation model based on game theory and ADC methods. To improve the overall effectiveness evaluation of missile weapon systems with phased flight characteristics, ref. [
12] proposed an improved effectiveness evaluation model based on the ADC method. In [
13], a combat effectiveness evaluation model based on a Levenberg–Marquardt backpropagation (LMBP) neural network was proposed based on the operating characteristics of antiaircraft missile warheads. In [
14], a backpropagation (BP) neural network was trained using the Delphi method and a fuzzy analytic hierarchy process, thus establishing an effectiveness indicator system for surface-based air defence missile weapon systems. Ref. [
15] proposed a fuzzy evaluation method based on the weighted relative deviation distance to evaluate the combat capabilities of anti-ship missile weapon systems. However, the methods applied in the abovementioned studies all focus on evaluating the combat capabilities of a single missile, without considering the mutual influence between the members of a missile formation, and thus are incapable of supporting a systematic and comprehensive assessment of the combat capabilities of missile formations. In addition, most of the aforementioned algorithms for performance evaluation require the use of the gradient information of the performance index function to determine the next optimization direction. Moreover, they are sensitive to initial value information and have low calculation accuracy.
Particle swarm optimization (PSO) is a random optimization algorithm based on swarm behaviour and has the advantages of a fast calculation speed and a strong optimization ability; accordingly, it has a wide range of applications for solving optimization problems [
16]. Based on an evaluation index system for the cooperative engagement effectiveness of unmanned surface vehicles, ref. [
17] combined a fuzzy analysis method and a BP neural network to establish an effectiveness evaluation model based on a PSO-BP neural network [
18], which used an agent-based modelling method, researched the structure and functions of a ballistic missile defence system and adopted the PSO algorithm to establish a multiagent decision support system that included a missile agent, radar agent, and command centre agent. Based on the PSO algorithm, ref. [
19] proposed a heuristic optimization model for surface-to-air missile path planning under a three-degree-of-freedom model to achieve the maximum range and optimal height of the missile. Ref. [
20] used the PSO algorithm to design the trajectory, propulsion, and aerodynamic characteristics of long-range ballistic missiles quickly using the minimum take-off quality as an indicator along with the given design variables and constraint functions. Although the methods described above have improved the performance of the PSO algorithm to varying degrees, the relationship between the overall fitness value of the swarm particles and the inertia weight during the evolution process has not been considered. Hence, in the optimization process for complex high-dimensional functions, the solution is still likely to fall into a local optimum.
Missile formation cooperative combat refers to a formation of multiple missiles of the same or different types that are coordinated in time, space, and function in accordance with tactical requirements to complete tactical tasks. Specifically, there are two types of missions, with different requirements, that are generally performed in missile formation combat: 1. Formation penetration. Compared with the penetration effect of a single missile, a missile formation can rely on coordination in time and space to achieve high-density and simultaneous penetration, which increases the difficulty of interception by the enemy’s defence system and maximizes the penetration effect of the formation. 2. Saturation attack. The most typical method of saturation attack is to use missiles with different control parameters and different flight altitudes to carry out multiple coordinated attacks in different directions at once in order to saturate the enemy’s defence system.
Indeed, formation design for multiple missiles is a prerequisite for realizing cooperative engagement in a formation. Due to the diversity of possible mission requirements during cooperative operations, the optimal formation of a missile group may change over time. In traditional cooperative engagement, formation reconfiguration control is often used to achieve formation changes. However, the actual reconfiguration process must consume some energy, and in situations where the mission requirements are constantly changing, the energy consumption is particularly high.
To address the abovementioned issues, this paper addresses the problem of optimal formation design considering the needs of different missions to reduce the energy consumed by a formation’s adjustments in response to continually changing mission requirements during the process of cooperative missile group engagement. The proposed cooperative multimissile formation has the following three advantages: 1. The missile formation can perceive the current battlefield situation using cooperative detection information and combine this information on the combat situation with the group’s attack missions to form corresponding combat instructions, thereby fully exercising the advantages of autonomous combat. 2. The design of the combat guidance commands for the missile formation fully considers the interaction between the motion characteristics of the group members and the target, reflecting the advantages of adversarial interaction. 3. The missile formation can consider the needs of different combat missions simultaneously to reduce the energy consumption during cooperative engagement, giving it the advantage of superior energy efficiency. Therefore, the main contributions of this work are as follows:
1. In view of the diversity of possible mission requirements during cooperative operations, we develop an optimal multimissile formation design method that satisfies the following conditions simultaneously: it can take into account the needs of different mission requirements; fully and accurately perceive the current battlefield situation; endow a missile group with a greatly enhanced ability to damage the target; effectively improve the missile group’s stealth, manoeuvrability and other penetration capabilities; and ensure that the group can adopt good formations with robust performance.
2. This paper establishes an evaluation index system for multimissile cooperative combat effectiveness and uses the analytic hierarchy process (AHP) based on partial triangular fuzzy numbers to evaluate the weight of the index at each level, thereby reducing the potential harm caused by the subjectivity of the expert evaluations on which the index system is based.
3. Considering that one weakness of the PSO algorithm is its tendency to easily fall into local extrema when solving optimization problems, this paper proposes an adaptive simulated annealing–particle swarm optimization (SA-PSO) algorithm that introduces an adaptive capability into the traditional PSO algorithm in combination with simulated annealing. The proposed algorithm does not require performance index gradient information and has fewer parameters than the PSO algorithm while achieving a faster convergence rate, making it easy to implement in engineering practice.
3. Combat Effectiveness Index Weights and Fitness Functions
Based on the combat effectiveness index system established above, a method based on triangular fuzzy numbers will be used to derive the weight of each index in this section. Furthermore, the fitness function corresponding to each index will be given.
3.1. Derivation of Index Weights Based on Triangular Fuzzy Numbers
During the traditional process of using the AHP to design index weights, each evaluation expert is expected to make accurate judgements on the importance of each index level and to determine the weights of the indices using the logarithmic least squares method. However, since the significance of the relationships between different indices may not be obvious, it can be difficult for the evaluation experts to make accurate judgements due to the influence of various kinds of interference, which reduces the credibility of the judgement matrix and ultimately leads to an unreasonable weight distribution.
To reduce the harm caused by the subjectivity of these expert evaluations, this paper introduces the concept of partial fuzzy triangular numbers into the judgement matrix while using the logarithmic least squares method to obtain the weight of each factor [
21]. In this paper, judgements are made based on triangular fuzzy numbers only for indices with uncertain relations, which reduces the number of calculations; at the same time, the authoritative assessments of experts are considered in the calculation process to obtain more reasonable results.
The derivation steps are as follows:
a. A total of k experts are invited to evaluate the indices, where the authority of each expert is and . Suppose that the relative importances and of indices and cannot be clearly judged. Then, the k experts give triangular fuzzy numbers for the relative importance , which they determine as follows: each expert specifies a minimum value and a maximum value of as well as a maximum possible value .
b. Using the weighted coefficient method, the triangular fuzzy numbers
representing the two levels of index
are obtained:
c. Using
as the reference value,
and
are used to represent the possibility
, which is equal to
and
times
and
, respectively. The probabilities
,
, and
for the triangular fuzzy number
are calculated using the equal probability method.
d. is transformed into a non-fuzzy number as follows:
e. Steps a~d are repeated to obtain .
f. Since the logarithmic least squares method is derived based on the assumption of reciprocity of the indices, the reciprocity adjustment of
and
is carried out as follows:
g. For a total of
indicators, the weights are derived using the logarithmic least squares method as follows:
3.2. Fitness Function Calculation
Before optimizing the formation of a missile group, it is necessary to design a fitness function for the formation, which will be used as the objective function of the optimization algorithm. Therefore, to evaluate the overall formation of the group, it is necessary to design a corresponding fitness function based on the cooperative combat effectiveness index system established above. The seven aspects corresponding to each second-level indicator will be discussed in the following paragraphs. For the fitness functions designed in this paper, a smaller function value indicates a better evaluation.
3.2.1. Detection Width
The detection width refers to the horizontal detection range within which the target can be found and tracked stably with the detection probability of the missile formation being no lower than a given value. The larger the detection width is, the stronger the ability to search for the target and the easier it is to find the target. Usually, a cone can be used to represent the detection area of a missile. As shown in
Figure 4, if we denote the generatrix of the cone by
and the apex angle by
, then the detection width of the missile is the corresponding basal diameter of the detection cone. For a missile formation, the detection width of the formation reaches its maximum when the detection areas of all missiles are continuous and do not overlap, in which case its value is the sum of the basal diameters of the detection cones of all missiles. Therefore, let the fitness function value in this case be 0. When the lateral distance between two adjacent missiles is less than the sum of the basal radii of their two detection cones, the detection areas of the two missiles will overlap, and the detection capability of the formation will decrease; thus, the fitness function should correspondingly increase. In contrast, when the distance between the missiles is too large, the detection areas of the missiles may be discontinuous, that is, a blind zone for detection appears. In this case, the detection capability of the missile formation will be greatly reduced. Therefore, the fitness function is set to 1 in this case. For n missiles, let
denote the lateral distance between two adjacent missiles, and let
and
denote half of the detection width for each of the two missiles. The corresponding fitness function
is designed as follows:
where
represents the horizontal distance between the leader and follower missiles and
represents the detection width of the missile formation members.
3.2.2. Detection Depth
The detection depth reflects the detection range of the missile formation at a certain moment. A greater detection depth allows more targets to be found at that moment. Similarly to the detection width, a greater detection depth results in a stronger detection capability of the formation and a smaller value of the corresponding fitness function. The fitness function
is designed as follows:
where
represents the longitudinal distance between the leader and follower missiles and
represents the depth of detection of the missile formation members.
3.2.3. Manoeuvrability without Mutual Interference
Non-interference in manoeuvring means that each missile remains within a proper range so that the missile will not affect neighbouring missiles when manoeuvring. When the minimum manoeuvring radius of a missile is less than the relative distance to its neighbouring missiles, the missile’s manoeuvrability and non-interference ability are considered to be strong. The manoeuvrability of any member of the missile formation can be expressed as
where
, represents the smallest relative distance among the distances to adjacent missiles and
represents the number of missiles adjacent to the
i-th missile.
The fitness function
of the missile formation for manoeuvring without mutual interference is
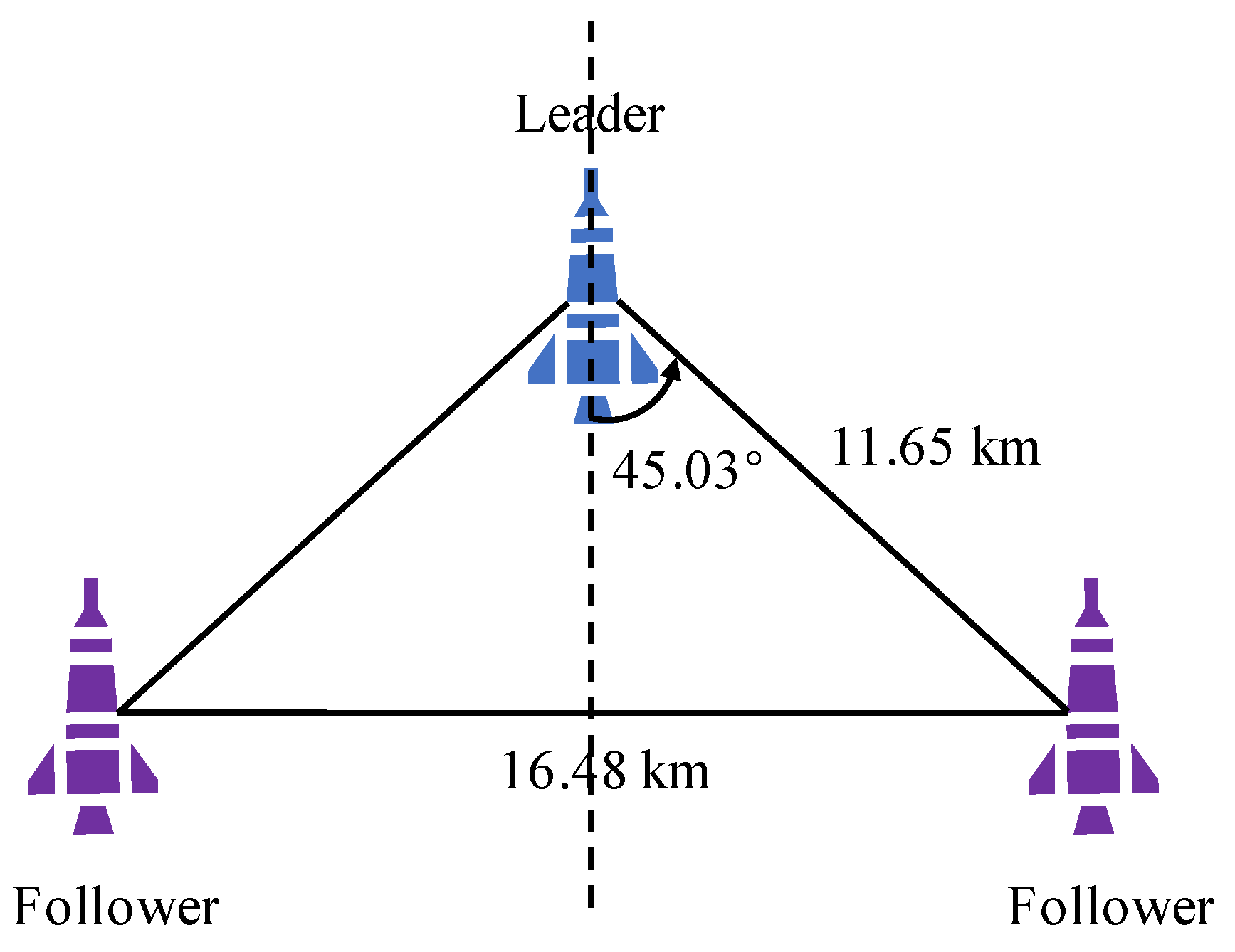
3.2.4. Attack Range
The attack range represents the spatial range within which the missile formation can finally carry out effective strikes. A more scattered missile formation results in a larger attack range and a smaller corresponding fitness function value. The fitness function
is designed as
where
represents the area covered by the missile formation and
represents the maximum area that the missile formation could cover in the same formation.
Using a triangular missile formation as an example,
3.2.5. Attack Density
The attack density reflects how frequently the missile formation can attack a target in a certain area. A greater attack density results in greater damage to a target in that area. This is subject to strict requirements on the time difference between each missile’s attack on the target area. The corresponding fitness function
is designed as follows:
where
represents the maximum distance between missiles and
represents the maximum allowable attack time difference, which is determined by the damage characteristics of the target.
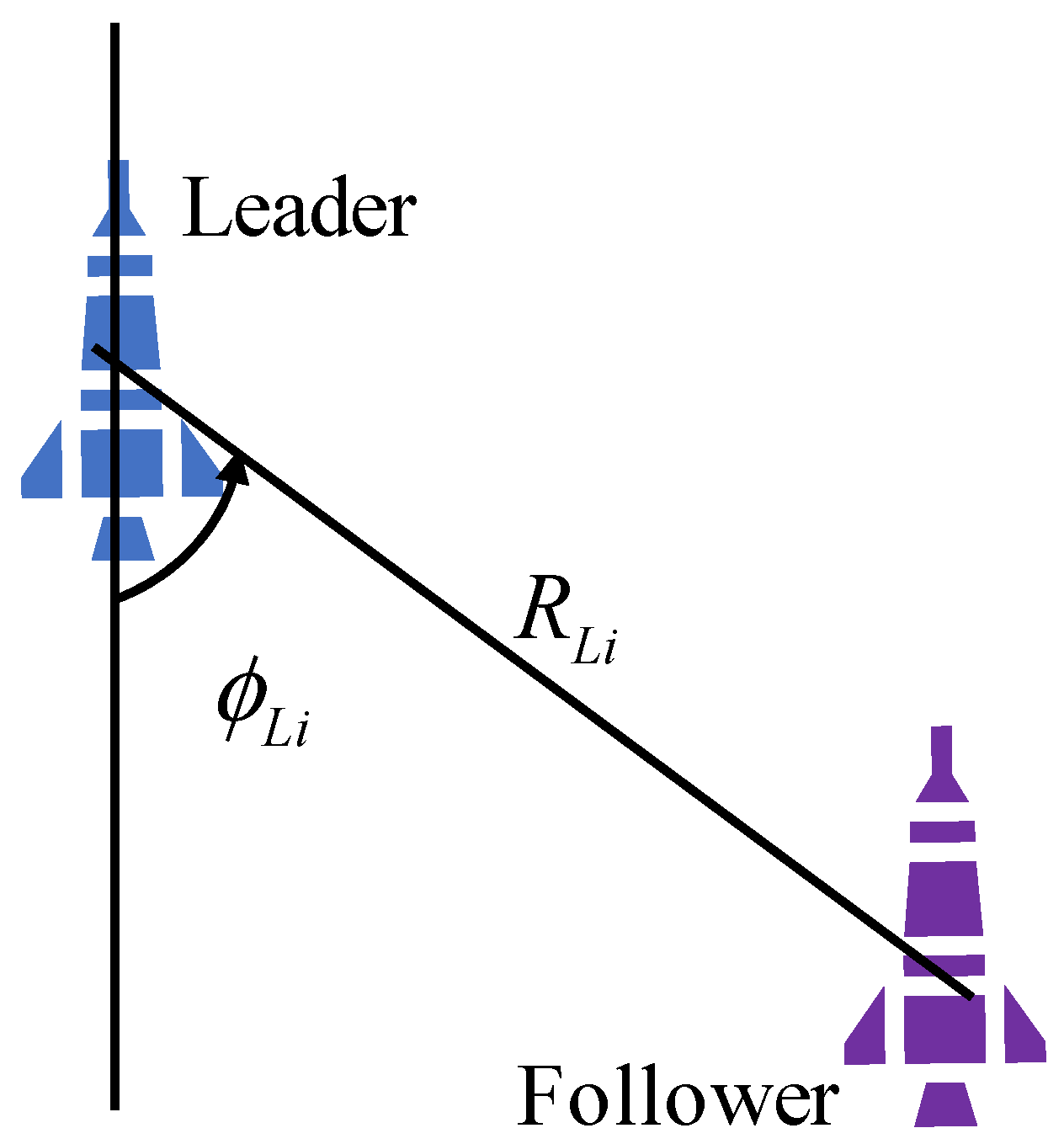
3.2.6. Command Response Time
The command response time represents the time interval between when a command is issued by the leader missile and when all the follower missiles receive the command. The command response time is determined by the information transmission distance between the leader missile and the last follower missile, which reflects the rapidity of command transmission. The corresponding fitness function
is designed as follows:
where
represents the distance between the
i-th follower missile and the leader missile and
represents the maximum communication distance allowed by the data volume to be transmitted within the missile formation.
3.2.7. Range of Flight Altitude
The flight altitude is an important factor affecting the tactical stealth capability of a missile. The maximum flight altitude among the members of a missile formation determines the stealth ability of the formation. The corresponding fitness function
is designed as follows:
where
is the lower limit on the flight altitude of the missile formation and
is the maximum flight altitude of the
i-th missile.
Finally, the second-level index weights calculated based on triangular fuzzy numbers as described in the previous subsection are used to perform a weighted summation of the fitness function for each performance indicator, and the total fitness function is obtained as follows:











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

