
10-Year Anniversary of the European Proximity Operations Simulator 2.0—Looking Back at Test Campaigns, Rendezvous Research and Facility Improvements †


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction: A Look Back
2. Heritage: EPOS 1.0
3. New Challenges: EPOS 2.0
4. Early Rendezvous Research with EPOS 2.0
4.1. Spacecraft Rendezvous
4.2. First Scanning LiDAR Experiments
4.3. Contact Dynamics
4.4. Connection of External Dynamics Simulators
4.5. Multiobjective Optimization
5. Sunlight, Lasers and the VIBANASS Tests
5.1. A Sunlight Simulator
5.2. Preparing for Lasers
5.3. VIBANASS Test Campaigns
6. Teaching a Robot to Tumble: The DEOS Tests
- The numerous trajectories for the open-loop tests were mainly derived from actual dynamics simulations and provided by EADS Astrium. In many test cases, the target mock up was tumbling, in strong contrast to the attitude stabilized GEO scenarios up to this point. Mapping these trajectories to EPOS 2.0 was found to be difficult. Robot joint limits and particularly the so-called singularity—joint configurations that the robot could not reach due to mathematical reasons—required the development of an optimization algorithm that allowed mapping the trajectories in a semi-automated way on a trial and error basis. This was not a perfect solution but was the foundation for considerable improvements at a later time.
- The fact that robot 2 could rotate the mock up through only two revolutions about its symmetry axis at this time limited the duration of the tumbling trajectories considerably.
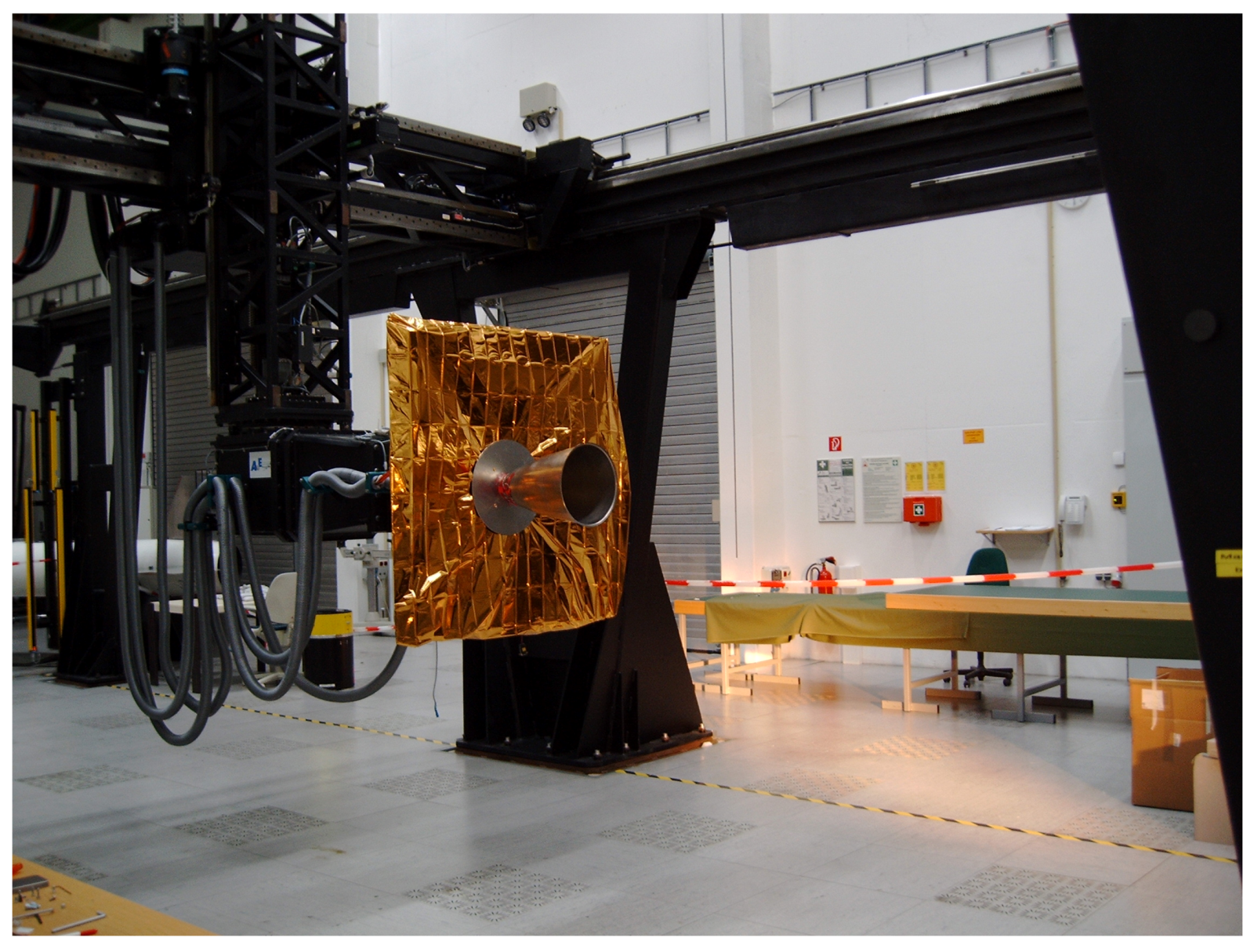
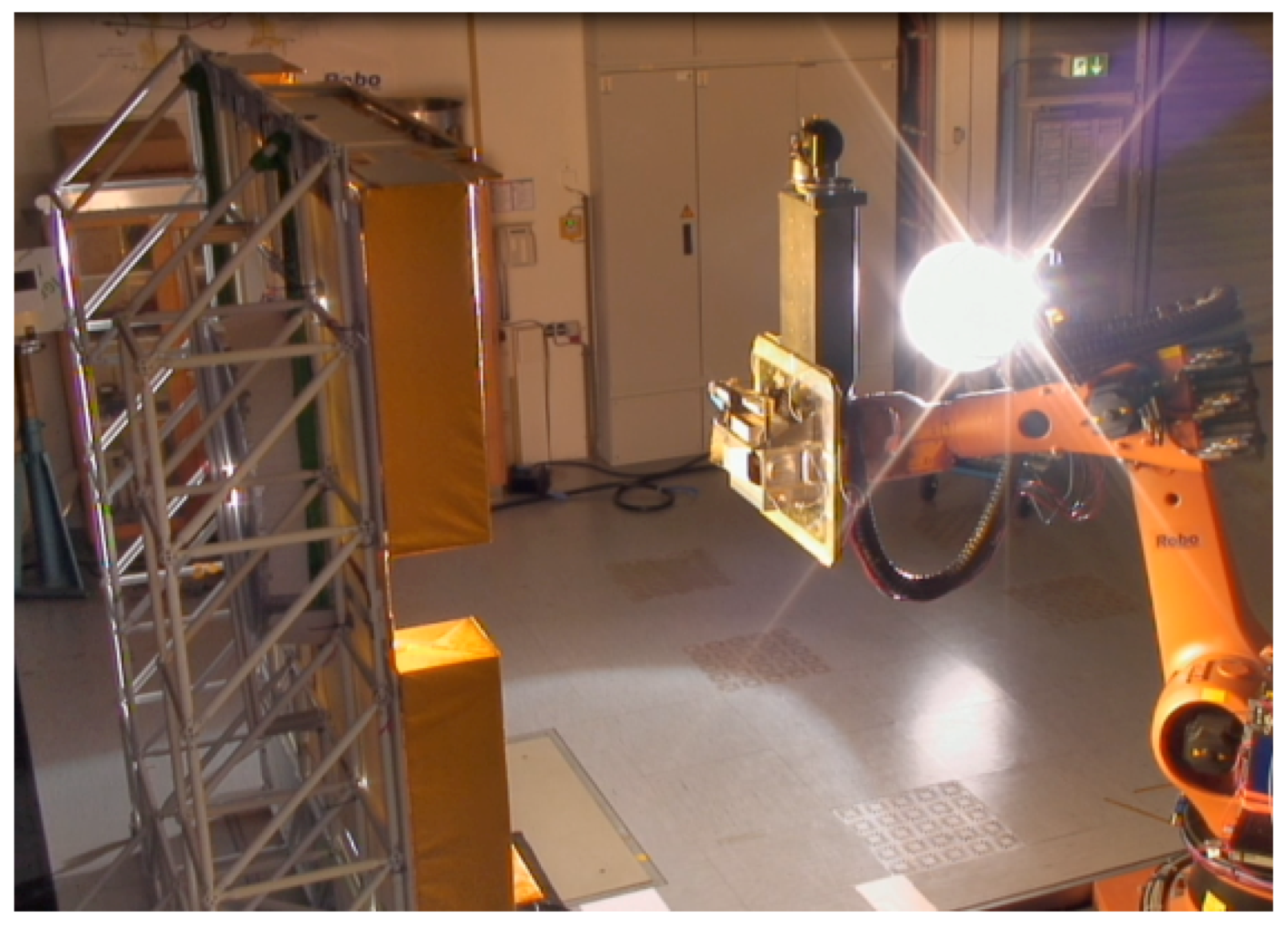
- As already mentioned, many trajectories included a tumbling target and active laser-based sensors. The shutters of all windows granting a glance into the laboratory had to be closed. It proved difficult for the EPOS operator to properly monitor the robots, especially at close range, with the two available surveillance cameras alone.
- In some cases, the laser curtain and the robot cell fence in the background of the target were too bright in the navigation camera images. Again, pieces of black cloth solved the problem.
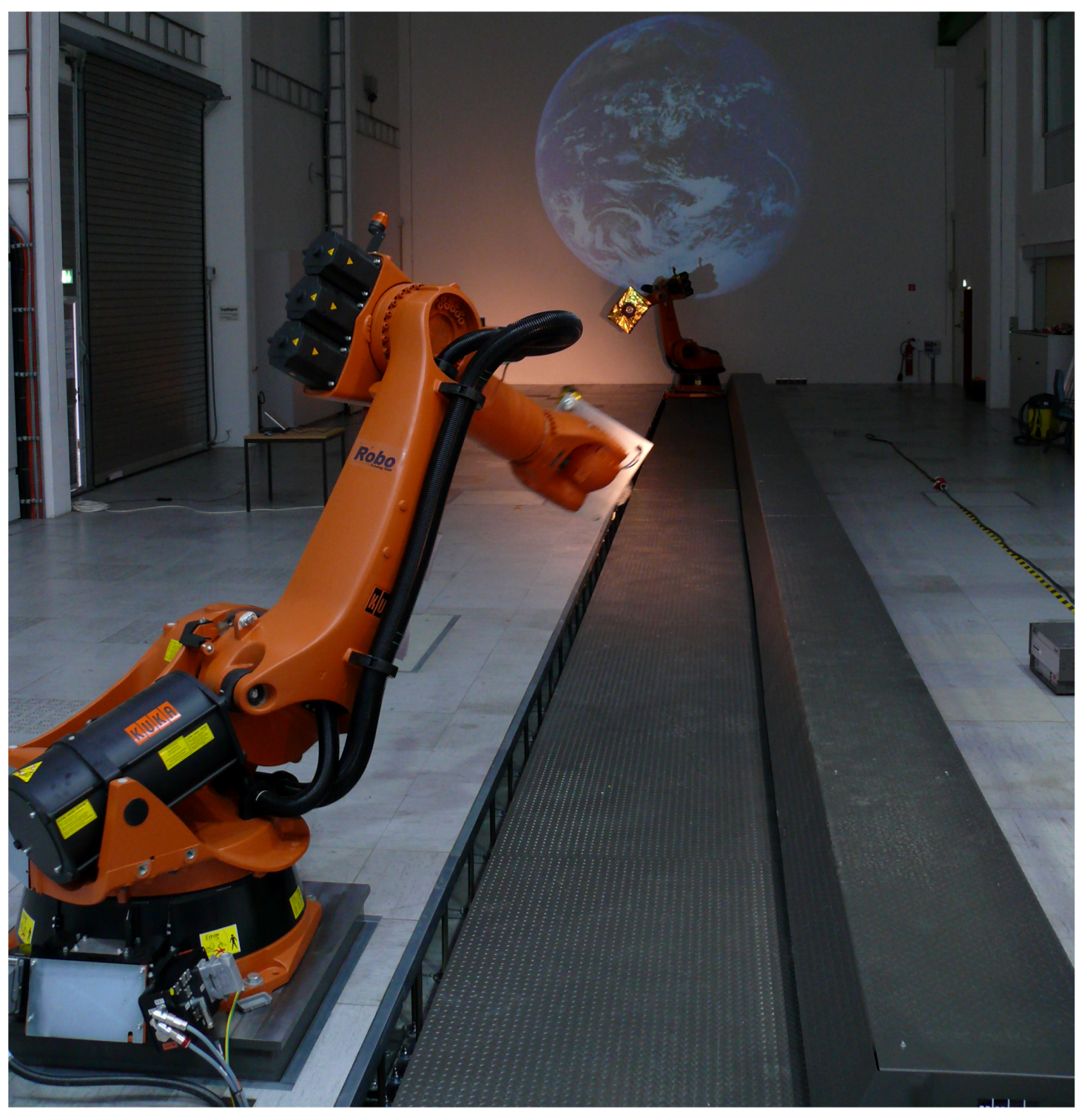
7. The Moon in the EPOS Lab: The Fosternav Tests
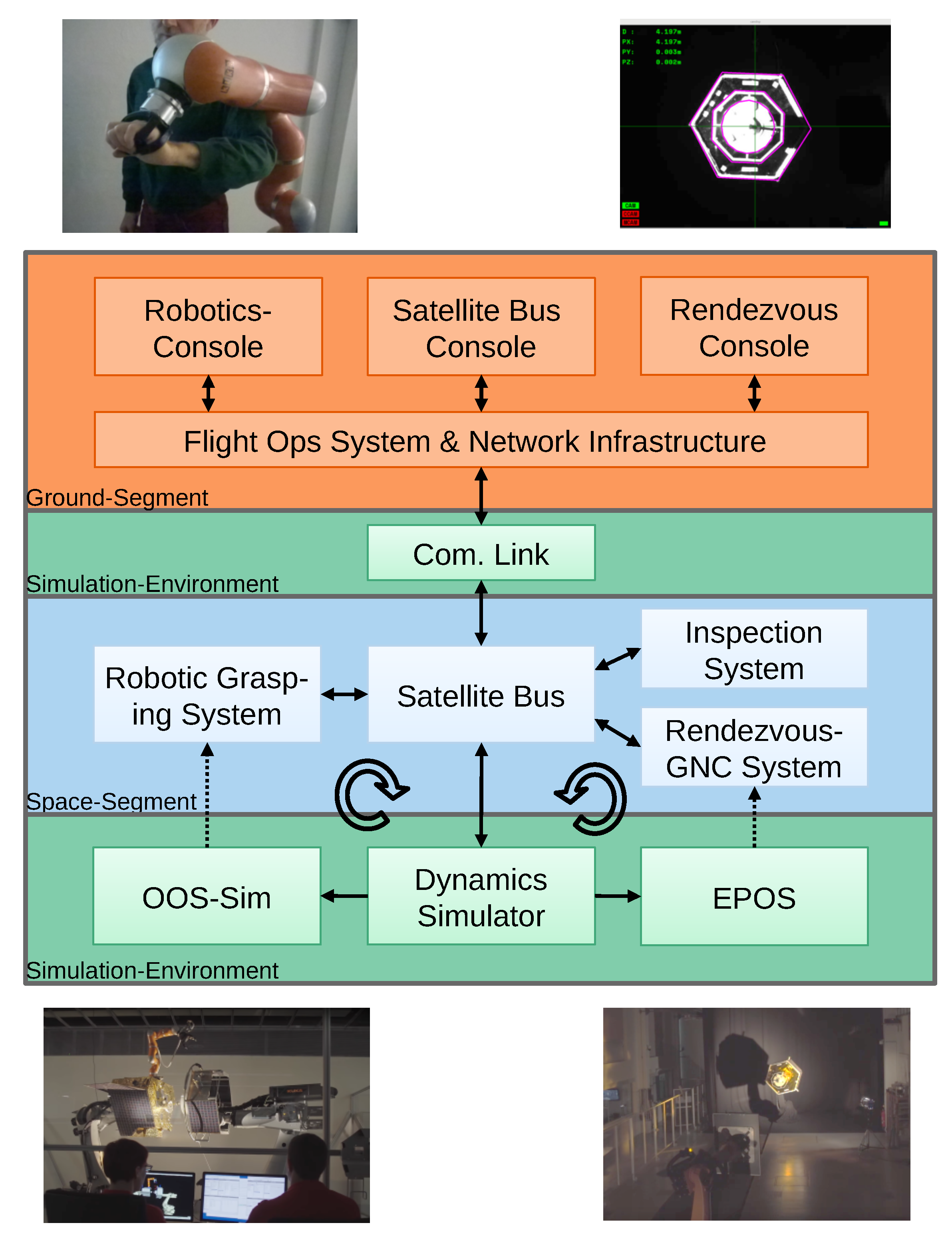
8. Advanced Rendezvous Research in DLR’s OOS-E2E Project
8.1. OOS-E2E and EPOS 2.0
8.2. RICADOS
8.3. Making EPOS fit for E2E
- The dynamics simulation worked in Earth Center Inertial (ECI) coordinates, while, in the laboratory, only the relative pose can be realized reasonably.
- Robot joint singularities and work space limits set boundaries to the possible set of fixed transformations from ECI to laboratory coordinates. A trial-and-error approach for each trajectory, as used up to this point, was not practical nor feasible for a complex closed-loop simulation.
- The realization of the starting conditions in a distributed simulation was a real challenge. It was not possible to synchronize the whole setup, including another HIL simulator and the whole GSOC satellite operations infrastructure to EPOS 2.0 and then start everything exactly at the same time. The robots can not realize a specific state with non-zero velocity at once. Finally, in development work, a solution that required all subsystems to coordinate in such a way was not practical and would have been very fragile.
- Simply connecting the robots to an external simulator leaves the facility vulnerable to any software bugs or human error. In closed-loop simulations anything can happen. An unstable control loop may accelerate the robots smoothly and cause a collision.
8.4. On-Board Computer in the Loop
9. GEO Again: SpaceTug
10. Welcome Back Serial Number One: Testing RVS3000
11. Going Beyond Earth Orbit: Mars Sample Return
12. Conclusion: A Look Ahead
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Zunker, H.; Backhaus, H. Laser Based Rendezvous Sensors in Test on the European Proximity Operations Simulator. In Proceedings of the AIAA Guidance, Navigation and Control Conference, Hilton Head Island, SC, USA, 10–12 August 1992. [Google Scholar]
- Boge, T.; Schreutelkamp. A New Commanding and Control Environment for Rendezvous and Docking Simulations at the EPOS-Facility. In Proceedings of the International Workshop on Simulation for European Space Programmes, Noordwijk, The Netherlands, 12–14 November 2002. [Google Scholar]
- Boge, T.; Rupp, T.; Landzettel, K.; Wimmer, T.; Mietner, C.; Bosse, J.; Thaler, B. Hardware in the Loop Simulator für Rendezvous und Docking Manöver. In Proceedings of the German Aerospace Congress, Aachen, Germany, 8–10 September 2009. [Google Scholar]
- Rupp, T.; Boge, T.; Kiehling, R.; Sellmaier, F. Flight Dynamics Challenges of the German On-Orbit Servicing Mission DEOS. In Proceedings of the International Symposium on Space Flight Dynamics, Toulouse, France, 28 September–2 October 2009. [Google Scholar]
- Personne, G.; Lopez-Y-Diaz, A.; Delpy, P. ATV GNC Synthesis: Overal Design, Operations and Main Performances. In Proceedings of the International ESA Conference on Guidance, Navigation and Control Systems, Loutraki, Greece, 17–20 October 2005. [Google Scholar]
- Goodman, J.L. History of Space Shuttle Rendezvous and Proximity Operations. J. Spacecr. Rocket. 2006, 43, 944–959. [Google Scholar] [CrossRef]
- Kelso, T. Analysis of the Iridium 33-Cosmos 2251 Collision. Adv. Astronaut. Sci. 2010, 135, 1099–1112. [Google Scholar]
- Pardini, C.; Anselmo, L. Physical Properties and Long-term Evolution of the Debris Clouds Produced by Two Catastrophic Collision in Earth Orbit. Adv. Space Res. 2011, 48, 557–569. [Google Scholar] [CrossRef]
- Nishida, S.I.; Kawamoto, S.; Okawa, Y.; Terui, F.; Kitamura, S. Space Debris Removal System using a Small Satellite. Acta Astronaut. 2009, 65, 95–102. [Google Scholar] [CrossRef]
- Bonnal, C.; Ruault, J.M.; Desjean, M.C. Active Debri Removal: Recent Progress and Current Trends. Acta Astronaut. 2013, 85, 51–60. [Google Scholar] [CrossRef]
- MacEwen, H.A.; Lillie, C.F. Infrastructure for Large Space Telescopes. JATIS 2016, 2, 1–8. [Google Scholar] [CrossRef]
- Lillie, C.F. On-Orbit Assembly and Servicing of Future Space Observatories. In Proceedings of the Space Telescopes and Instrumentation I: Optical, Infrared, and Millimeter, International Society for Optics and Photonics, SPIE, Orlando, FL, USA, 14 June 2006; Volume 6265, pp. 767–778. [Google Scholar]
- Gralla, E.; Weck, O.D. Strategies for On-Orbit Assembly of Modular Spacecraft. J. Br. Interplanet. Soc. 2007, 60, 219–227. [Google Scholar]
- Ellery, A.; Kreisel, J.; Sommer, B. The Case for Robotic On-Orbit Servicing of Spacecraft: Spacecraft Reliability is a Myth. Acta Astronaut. 2008, 63, 632–648. [Google Scholar] [CrossRef]
- Stoll, E.; Letschnik, J.; Walter, U.; Artigas, J.; Kremer, P.; Preusche, C.; Hirzinger, G. On-Orbit Servicing. IEEE Robot. Autom. Mag. 2009, 16, 29–33. [Google Scholar] [CrossRef]
- Graham, A.; Kingston, J. Assessment of the Commercial Viability of Selected Options for On-Orbit Servicing (OOS). Acta Astronaut. 2015, 117, 38–48. [Google Scholar] [CrossRef]
- Kaiser, C.; Rank, P.; Landzettel, K.; Boge, T.; Turk, M. Vision Based Navigation for Future On-Orbit Servicing Missions. In Proceedings of the International Astronautical Congress, Cape Town, South Africa, 3–7 October 2011. [Google Scholar]
- Reintsema, D.; Thaeter, J.; Rathke, A.; Naumann, W.; Rank, P.; Sommer, J. DEOS—The German Robotics Approach to Secure and De-Orbit Malfunctioned Satellites from Low Earth Orbits. In Proceedings of the International Symposium on Artificial Intelligence, Robotics and Automation in Space, Sapporo, Japan, 29 August–1 September 2010. [Google Scholar]
- Benninghoff, H.; Boge, T.; Rems, F. Autonomous Navigation for On-Orbit Servicing. KI—KÜnstliche Intell. 2014, 28, 77–83. [Google Scholar] [CrossRef]
- Sellmaier, F.; Boge, T.; Spurmann, J.; Gully, S.; Rupp, T.; Huber, F. On-Orbit Servicing Missions: Challenges and Solutions for Spacecraft Operations. In Proceedings of the International Conference on Space Operations, Huntsville, AL, USA, 25–30 April 2010. [Google Scholar]
- Sellmaier, F.; Boge, T.; Spurmann, J. On-Orbit Servicing Missions at DLR/GSOC. In Proceedings of the International Astronautical Congress, Prague, Czech Republic, 27 September–1 October 2010. [Google Scholar]
- Boge, T.; Wimmer, T.; Ma, O.; Zebenay, M. EPOS–A Robotics-Based Hardware-in-the-Loop Simulator for Simulating Satellite RvD Operations. In Proceedings of the International Symposium on Artificial Intelligence, Robotics and Automation in Space, Sapporo, Japan, 29 August–1 September 2010. [Google Scholar]
- Benninghoff, H.; Rems, F.; Risse, E.A.; Mietner, C. European Proximity Operations Simulator 2.0 (EPOS)—A Robotic-Based Rendezvous and Docking Simulator. JLSRF 2017, 3. [Google Scholar] [CrossRef]
- Boge, T.; Benninghoff, H.; Zebenay, M.; Rems, F. Using Robots for Advanced Rendezvous and Docking Simulation. In Proceedings of the Simulation and EGSE Facilities for Space Programmes Conference, Noordwijk, The Netherlands, 25–27 September 2012. [Google Scholar]
- Boge, T.; Wimmer, T.; Ma, O.; Tzschichholz, T. EPOS—Using Robotics for RvD Simulation of On-Orbit Servicing Missions. In Proceedings of the AIAA Modeling and Simulation Technologies Conference, Toronto, Canada, 2–5 August 2010. [Google Scholar]
- Tzschichholz, T.; Boge, T. GNC Systems Development in Conjunction with a RvD Hardware-in-the-Loop Simulator. In Proceedings of the International Conference on Astrodynamics Tools and Techniques, Madrid, Spain, 3–6 May 2010. [Google Scholar]
- Tzschichholz, T.; Boge, T.; Benninghoff, H. A Flexible Image Processing Framework for Vision-based Navigation using Monocular Image Sensors. In Proceedings of the International ESA Conference on Guidance, Navigation & Control Systems, Carlsbad, Czech Republic, 5–10 June 2011. [Google Scholar]
- Fehse, W. Automated Rendezvous and Docking of Spacecraft; Cambridge Aerospace Series; Cambridge University Press: Washington, DC, USA, 2003. [Google Scholar]
- Kalman, R.E. A New Approach to Linear Filtering and Prediction Problems. Trans. ASME—J. Basic Eng. 1960, 83, 33–45. [Google Scholar] [CrossRef] [Green Version]
- Wertz, J.R. (Ed.) Spacecraft Attitude Determination and Control; Springer: Dordrecht, The Netherlands, 1978. [Google Scholar]
- Benninghoff, H.; Tschichholz, T.; Boge, T.; Rupp, T. Hardware-in-the-Loop Simulation of Rendezvous and Docking Maneuvers in On-Orbit Servicing Missions. In Proceedings of the International Symposium on Space Technology and Science, Okinawa, Japan, 5–12 June 2011. [Google Scholar]
- Boge, T.; Benninghoff, H.; Tzschichholz, T. Hardware-in-the-Loop Rendezvous Simulation using a Vision Based Sensor. In Proceedings of the International ESA Conference on Guidance, Navigation & Control Systems, Carlsbad, Czechia, 5–10 June 2011. [Google Scholar]
- Benninghoff, H.; Boge, T.; Tzschichholz, T. Hardware-in-the-Loop Rendezvous Simulation Involving an Autonomous Guidance, Navigation and Control System. In Proceedings of the IAA Conference on Dynamics and Control of Space Systems, Porto, Portugal, 19–21 March 2012. [Google Scholar]
- Boge, T.; Benninghoff, H.; Tzschichholz, T. Visual Navigation for On-Orbit Servicing Missions. In Proceedings of the International Conference on Spacecraft Formation Flying Missions and Technologies, Munich, Germany, 29–31 May 2013. [Google Scholar]
- Fischler, R.B.M. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Tzschichholz, T.; Boge, T.; Schilling, K. Relative Pose Estimation of Satellites using PMD-/CCD-sensor Data Fusion. Acta Astronaut. 2015, 109, 25–33. [Google Scholar] [CrossRef]
- Rems, F.; Fritz, S.; Boge, T. Breadboard Model of a 3D LiDAR Sensor for Real-time Pose Estimation of Spacecraft. In Proceedings of the International ESA Conference on Guidance, Navigation & Control Systems, Porto, Portugal, 2–6 June 2014. [Google Scholar]
- Rems, F.; González, J.A.M.; Boge, T.; Tuttas, S.; Stilla, U. Fast Initial Pose Estimation of Spacecraft from LiDAR Point Cloud Data. In Proceedings of the Symposium on Advanced Space Technologies in Robotics and Automation, Noordwijk, The Netherlands, 11–13 May 2015. [Google Scholar]
- Zebenay, M.; Lampariello, R.; Boge, T.; Krenn, R. Control Strategy of Hardware-in-the-Loop Simulator EPOS 2.0 for Autonomous Docking Verification. In Proceedings of the Annual Meeting of the International Association of Applied Mathematics and Mechanics, Graz, Austria, 18–21 April 2011. [Google Scholar]
- Zebenay, M.; Lampariello, R.; Boge, T.; Choukroun, D. A New Contact Dynamics Model Tool for Hardware-in-the-Loop Docking Simulation. In Proceedings of the International Symposium on Artificial Intelligence, Robotics and Automation in Space, Torino, Italy, 4–7 September 2012. [Google Scholar]
- Zebenay, M.; Boge, T.; Krenn, R.; Choukroun, D. Analytical and Experimental Stability Investigation of a Hardware-in-the-Loop Satellite Docking Simulator. J. Aerosp. Eng. 2015, 229, 666–681. [Google Scholar] [CrossRef] [Green Version]
- Zebenay, M.; Boge, T.; Choukroun, D. Modelling, Stability Analysis, and Testing of a Hybrid Docking Simulator. In Proceedings of the AIAA Guidance Navigation and Control Conference, Boston, MA, USA, 19–22 August 2013. [Google Scholar]
- Zebenay, M.; Boge, T.; Lampariello, R.; Choukroun, D. Satellite Docking Simulation Based on HIL Hybrid Contact Model. In Proceedings of the Symposium on Advanced Space Technologies in Robotics and Automation, Noordwijk, The Netherlands, 15–17 May 2013. [Google Scholar]
- Rems, F. Integrating the European Proximity Operations Simulator with the Formation Flying Testbed. In Proceedings of the German Aerospace Congress, Berlin, Germany, 10–12 September 2012. [Google Scholar]
- dos Santos, W.G.; Rocco, E.M.; Boge, T. Design of a Linear Time-invariant Control System Based on a Multiobjective Optimization Approach. Comput. Appl. Math. 2015, 35, 789–801. [Google Scholar]
- dos Santos, W.G.; Rocco, E.M.; Boge, T.; Benninghoff, H.; Rems, F. Multi-objective Optimization Applied to Real-time Command Problem of Spacecraft Thrusters. J. Spacecr. Rockets 2015, 52, 1407–1416. [Google Scholar] [CrossRef]
- dos Santos, W.G.; Rocco, E.M.; Boge, T.; Benninghoff, H.; Rems, F. A Novel Solution for the Spacecraft Mixed Actuators Problem Based on a Multiobjective Optimization Method. In Proceedings of the International Symposium on Space Flight Dynamics, Munich, Germany, 19–23 October 2015. [Google Scholar]
- dos Santos, W.G.; Rocco, E.M.; Boge, T.; Rems, F.; Benninghoff, H. Discrete Multiobjective Optimization Methodology Applied to the Mixed Actuators Problem and Tested in a Hardware-in-the-Loop Rendevzous Simulator. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Kissimmee, FL, USA, 5–9 January 2015. [Google Scholar]
- dos Santos, W.G.; Rocco, E.M.; Boge, T.; Benninghoff, H.; Rems, F. Hardware-in-the-Loop Rendezvous Tests of a Novel Actuators Command Concept. J. Astronaut. Sci. 2016, 63, 287–307. [Google Scholar] [CrossRef]
- Mühlbauer, Q.; Richter, L.; Kaiser, C.; Hofmann, P. Robotics Space Systems and Subsystems for Advanced Future Programms. In Proceedings of the International Symposium on Artificial Intelligence, Robotics and Automation in Space, Turin, Italy, 4–7 September 2012. [Google Scholar]
- Mühlbauer, Q.; Rank, P.; Kaiser, C. On-ground Verification of VIBANASS (Vision Based Navigation Sensor System): Capabilities and Results. In Proceedings of the Symposium on Advanced Space Technologies in Robotics and Automation, Noordwijk, The Netherlands, 15–17 May 2013. [Google Scholar]
- Benninghoff, H.; Rems, F.; Boge, T. Development and Hardware-in-the-Loop Test of a Guidance, Navigation and Control System for On-Orbit Servicing. Acta Astronaut. 2014, 102, 67–80. [Google Scholar] [CrossRef]
- Boge, T.; Benninghoff, H. Rendezvous Simulation for On-Orbit Servicing Missions using Advanced Robotic Technology. In Proceedings of the International Symposium on Automatic Control in Space, Würzburg, Germany, 2–6 September 2013. [Google Scholar]
- Krüger, H.; Theil, S.; Sagliano, M.; Hartkopf, S. On-ground Testing of Optical Navigation Systems for Exploration Missions. In Proceedings of the International ESA Conference on Guidance, Navigation & Control Systems, Porto, Portugal, 2–6 June 2014. [Google Scholar]
- Weber, D.; Gnat, M.; Hauke, A.; Huber, F.; Acero, C.G. End-to-End Simulation of On-Orbit-Servicing: Technical Implementation of Communications. In Proceedings of the International Conference on Space Operations, Marseille, France, 28 May–1 June 2018. [Google Scholar]
- Artigas, J.; Stefano, M.D.; Rackl, W.; Lampariello, R.; Brunner, B.; Bertleff, W.; Burger, R.; Porges, O.; Giordano, A.; Borst, C.; et al. The OOS-SIM: An On-ground Simulation Facility for On-Orbit Servicing Robotic Operations. In Proceedings of the IEEE International Conference on Robotics and Automation, Seattle, WA, USA, 25–30 May 2015. [Google Scholar]
- Benninghoff, H.; Rems, F.; Risse, E.; Brunner, B.; Stelzer, M.; Krenn, R.; Reiner, M.; Stangl, C.; Gnat, M. End-to-End Simulation and Verification of GNC and Robotic Systems Considering Both Space Segment and Ground Segment. CEAS Space J. 2018, 10, 535–553. [Google Scholar] [CrossRef]
- Rems, F.; Risse, E.A.; Benninghoff, H. Rendezvous GNC-system for Autonomous Orbital Servicing of Uncooperative Targets. In Proceedings of the International ESA Conference on Guidance, Navigation & Control Systems, Salzburg, Austria, 29 May–2 June 2017. [Google Scholar]
- Klionovska, K.; Benninghoff, H. Visual Navigation for Rendezvous and Docking using PMD Camera. In Proceedings of the International Conference on Geographical Information Systems Theory, Applications and Management, Rome, Italy, 26–27 April 2016. [Google Scholar]
- Klionovska, K.; Benninghoff, H. Initial Pose Estimation using PMD Sensor during the Rendezvous Phase in On-Orbit Servicing Missions. In Proceedings of the AAAS/AIAAA Space Flight Mechanics Meeting, San Antonio, TX, USA, 5–9 February 2017. [Google Scholar]
- Klionovska, K.; Benninghoff, H.; Strobl, K.H. PMD Camera- and Hand-eye-calibration for On-Orbit Servicing Test Scenarios on the Ground. In Proceedings of the Symposium on Advanced Space Technologies in Robotics and Automation, Scheltema, Leiden, The Netherlands, 20–22 June 2017. [Google Scholar]
- Klionovska, K.; Ventura, J.; Benninghoff, H.; Huber, F. Close Range Tracking of an Uncooperative Space Target in a Sequence of PMD Images. In Proceedings of the IAA Conference on Space Situational Awareness, Orlando, FL, USA, 13–15 November 2017. [Google Scholar]
- Klionovska, K.; Ventura, J.; Benninghoff, H.; Huber, F. Close Range Tracking of an Uncooperative Target in a Sequence of Photonic Mixer Device (PMD) Images. Robotics 2018, 7, 5. [Google Scholar] [CrossRef] [Green Version]
- Klionovska, K.; Benninghoff, H.; Huber, F. More Accurate Pose Initialization with Redundant Measurements. In Proceedings of the International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications, Prague, Czechia, 25–27 February 2019. [Google Scholar]
- Benninghoff, H.; Rems, F.; Risse, E.A.; Irmisch, P.; Ernst, I.; Brunner, B.; Stelzer, M.; Lampariello, R.; Krenn, R.; Reiner, M.; et al. RICADOS—Rendezvous, Inspection, Capturing and Detumbling by Orbital Servicing. In Proceedings of the International Conference on Astrodynamics Tools and Techniques, Weßling, Germany, 6–9 November 2018. [Google Scholar]
- Klionovska, K.; Benninghoff, H.; Risse, E.A.; Huber, F. Experimental Analysis of Measurements Fusion for Pose Estimation using PMD Sensor. In Proceedings of the Iberoamerican Congress on Pattern Recognition, Madrid, Spain, 19–22 November 2018. [Google Scholar]
- Rubin, K.S. Essential Scrum: A Practical Guide to the Most Popular Agile Process; Addison-Wesley: Ann Arbor, MI, USA, 2012. [Google Scholar]
- Rems, F. Robotic Verification of Spacecraft Rendezvous In-loop with Real-time Satellite Dynamics Simulation. In Proceedings of the German Aerospace Conference, Munich, Germany, 5–7 September 2017. [Google Scholar]
- Treudler, C.J.; Benninghoff, H.; Borchers, K.; Brunner, B.; Cremer, J.; Dumke, M.; Gärtner, T.; Höflinger, K.J.; Lüdtke, D.; Peng, T.; et al. ScOSA—Scalable On-Board Computing for Space Avionics. In Proceedings of the International Astronautical Congress, Bremen, Germany, 1–5 October 2018. [Google Scholar]
- Schwenk, K.; Ulmer, M.; Peng, T. ScOSA: Application Development for a High-performance Space Qualified Onboard Computing Platform. In High-Performance Computing in Geoscience and Remote Sensing, Proceedings of SPIE 10792, High-Performance Computing in Geoscience and Remote Sensing VIII, Berlin, Germany, 10–13 September 2018; SPIE: Berlin, Germany, 2018; Volume VIII. [Google Scholar]
- Burri, M.; Frei, H.; Rems, F.; Klionovska, K.; Risse, E.A.; Kanani, K.; Masson, A.; Falcoz, A. Mars Sample Return—Test Campaign for near Range Image Processing on European Proximity Operations Simulator. In Proceedings of the International ESA Conference on Guidance, Navigation & Control, Virtual, 22–25 June 2021. [Google Scholar]
- Joint Statement of Intent between the National Aeronautics and Space Administration and the European Space Agency on Mars Sample Return. 26 April 2018. Available online: https://mepag.jpl.nasa.gov/announcements/2018-04-26%NASA-ESA%SOI%(Signed).pdf (accessed on 23 August 2021).





















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rems, F.; Frei, H.; Risse, E.-A.; Burri, M. 10-Year Anniversary of the European Proximity Operations Simulator 2.0—Looking Back at Test Campaigns, Rendezvous Research and Facility Improvements. Aerospace 2021, 8, 235. https://doi.org/10.3390/aerospace8090235
Rems F, Frei H, Risse E-A, Burri M. 10-Year Anniversary of the European Proximity Operations Simulator 2.0—Looking Back at Test Campaigns, Rendezvous Research and Facility Improvements. Aerospace. 2021; 8(9):235. https://doi.org/10.3390/aerospace8090235
Chicago/Turabian StyleRems, Florian, Heike Frei, Eicke-Alexander Risse, and Matthias Burri. 2021. "10-Year Anniversary of the European Proximity Operations Simulator 2.0—Looking Back at Test Campaigns, Rendezvous Research and Facility Improvements" Aerospace 8, no. 9: 235. https://doi.org/10.3390/aerospace8090235