
FMI-Based Multi-Domain Simulation for an Aero-Engine Control System


Abstract
:1. Introduction
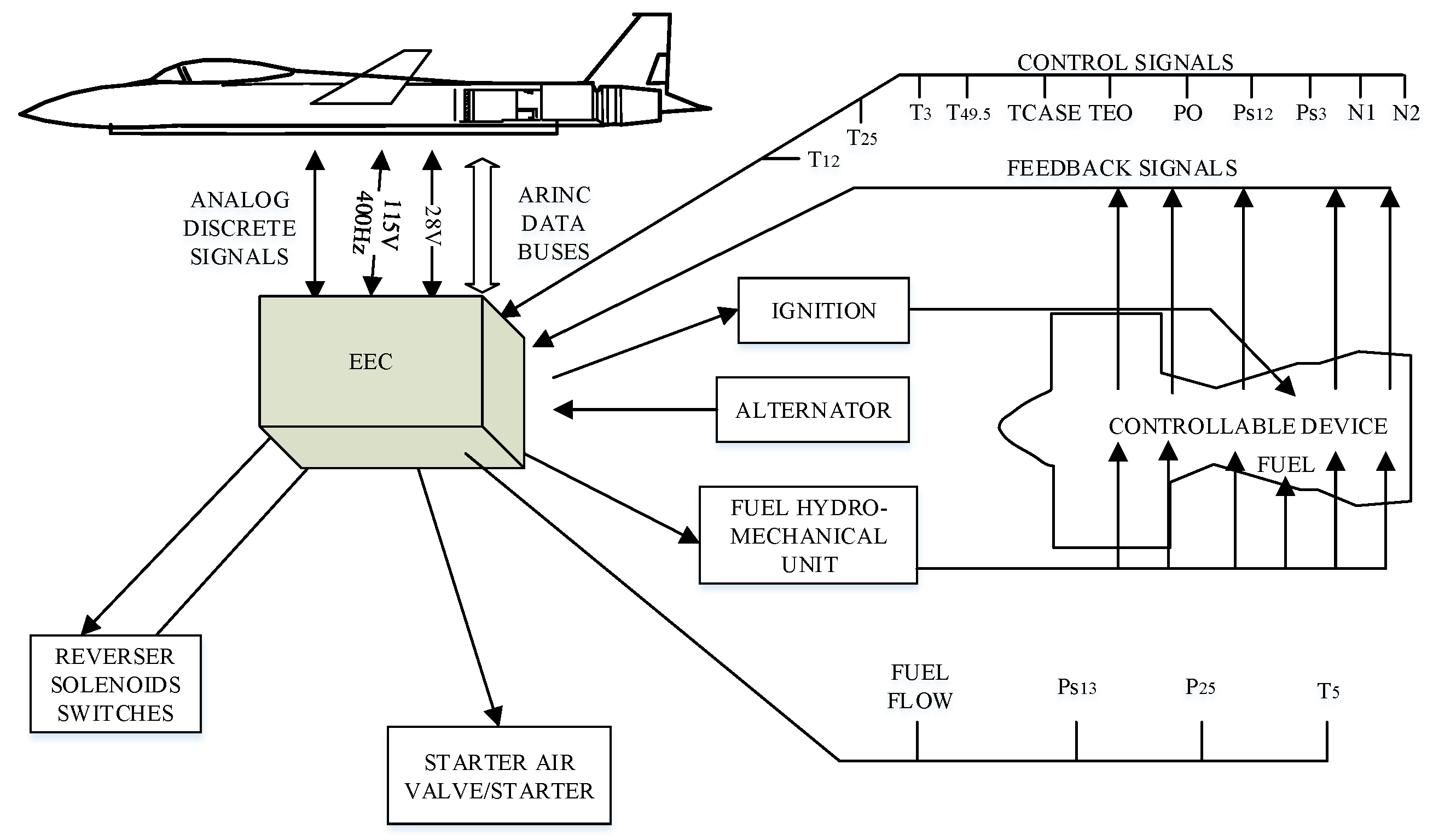
2. Modeling and Simulation of Aeroengine Control System Components
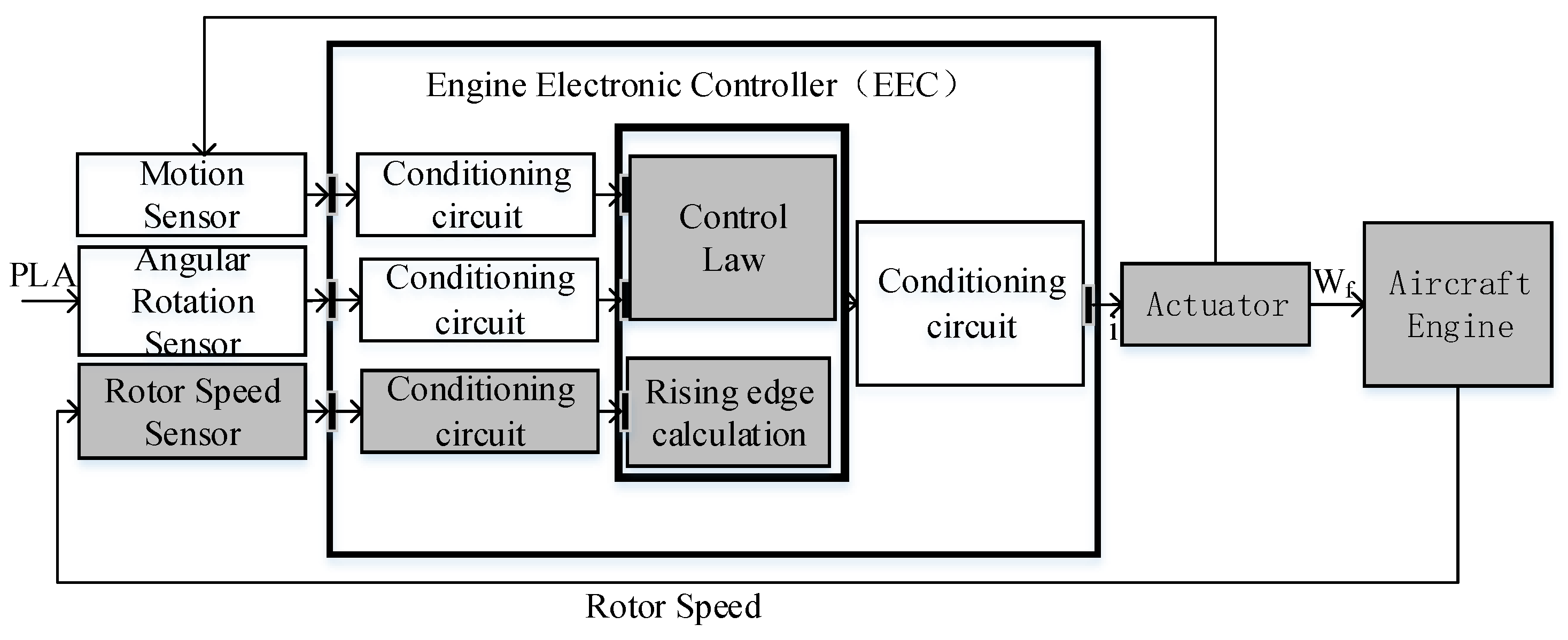
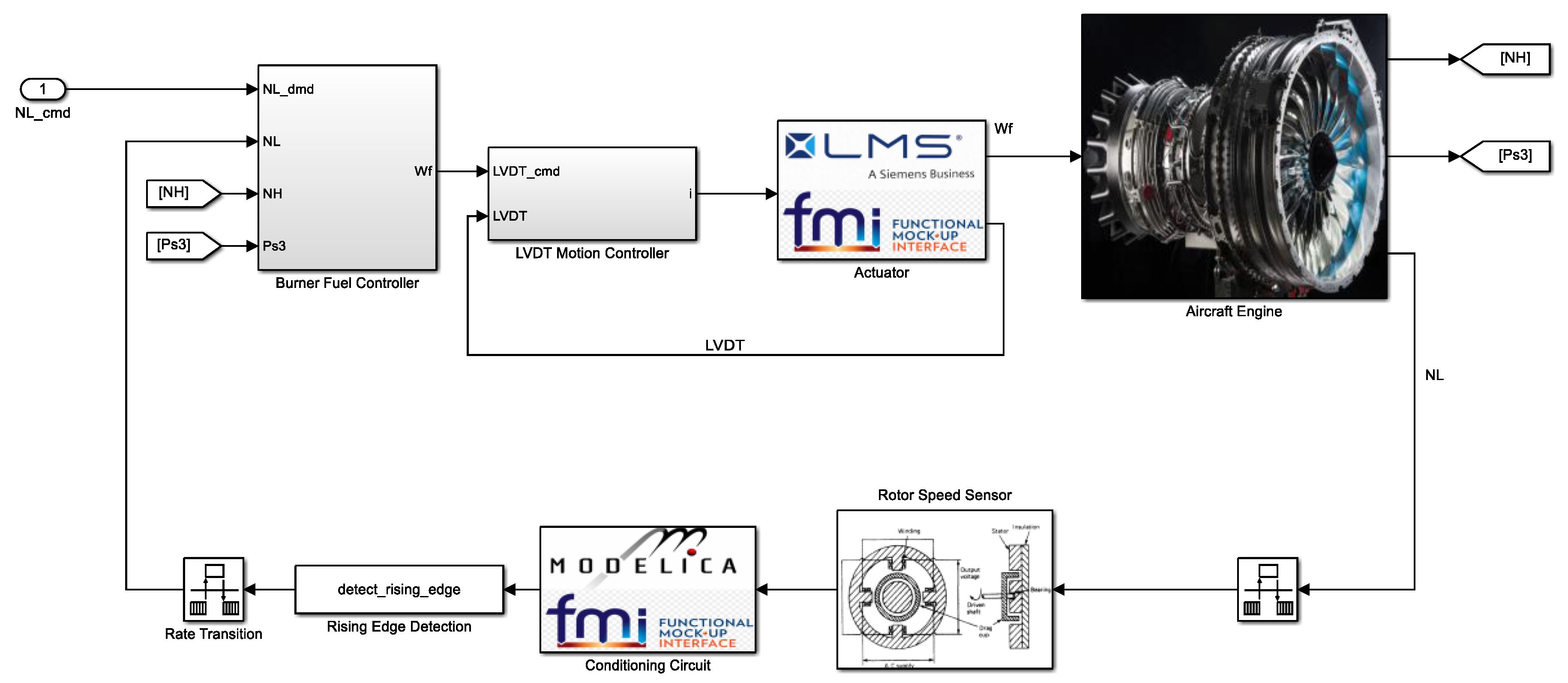
- (1)
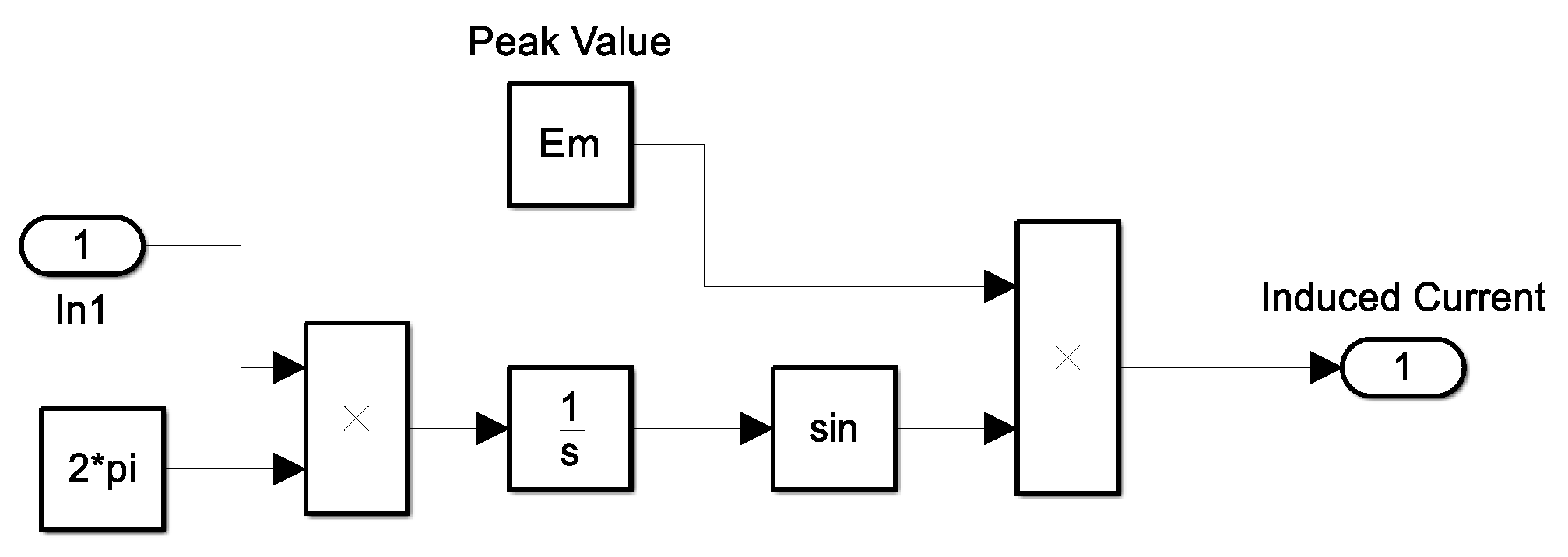
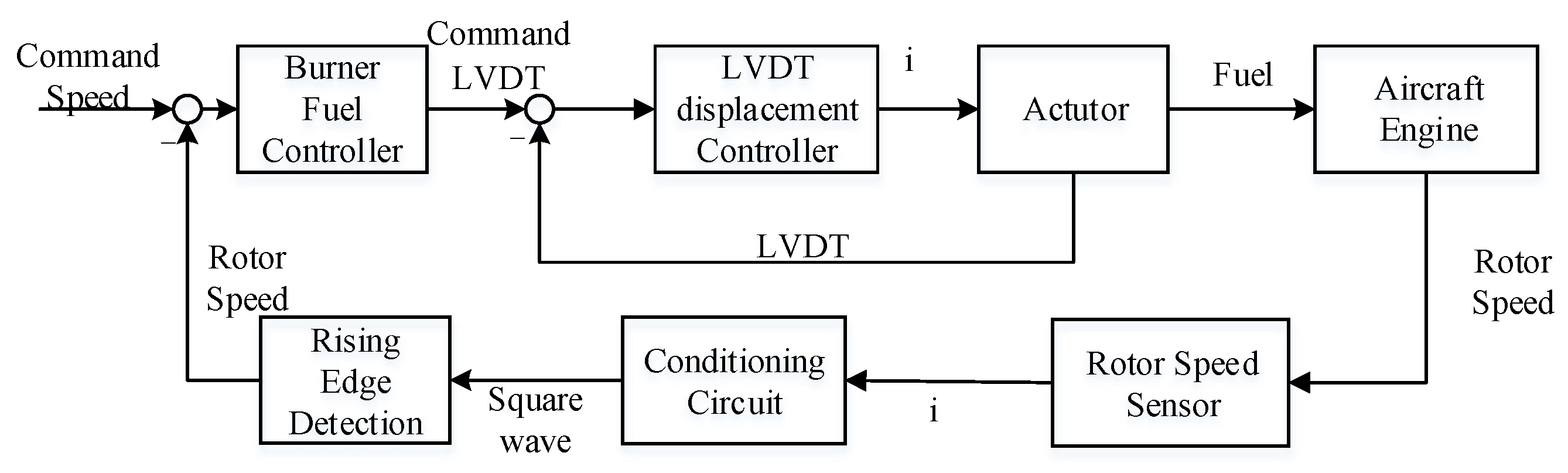
- The rotor speed sensor converts the output speed value of the engine into the induction current of the corresponding frequency;
- (2)
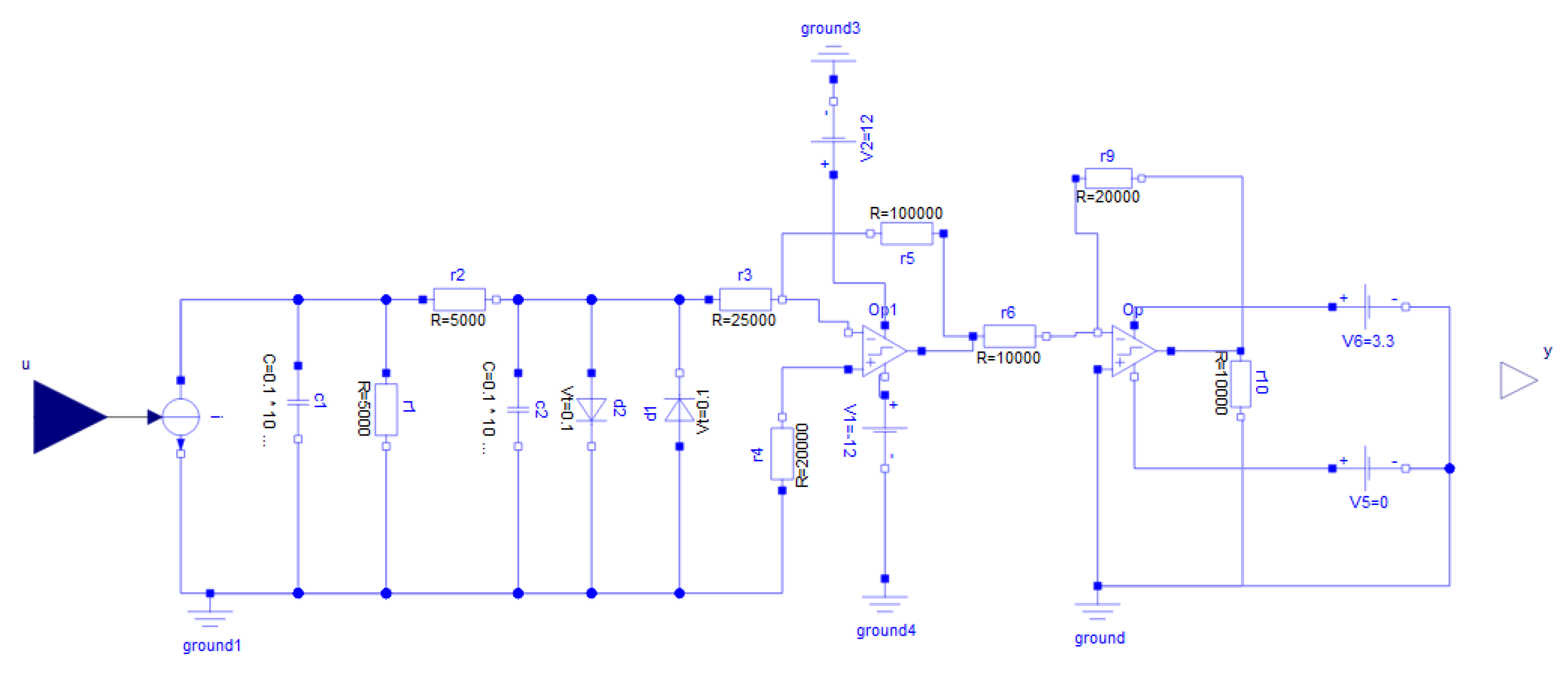
- The conditioning circuit in EEC converts the current signal from the sensor into a square wave signal acceptable to the CPU;
- (3)
- The rising edge calculation module in EEC calculates the period of the square wave signal output from the conditioning circuit by the method of measuring the cycles and obtains the corresponding speed according to the relationship between the period of square wave signal and the speed. The control law in EEC calculates the output driving the current according to the reference speed, current speed, and displacement feedback of fuel actuator. The reference speed is converted from its relationship with the Power Level Angle (PLA);
- (4)
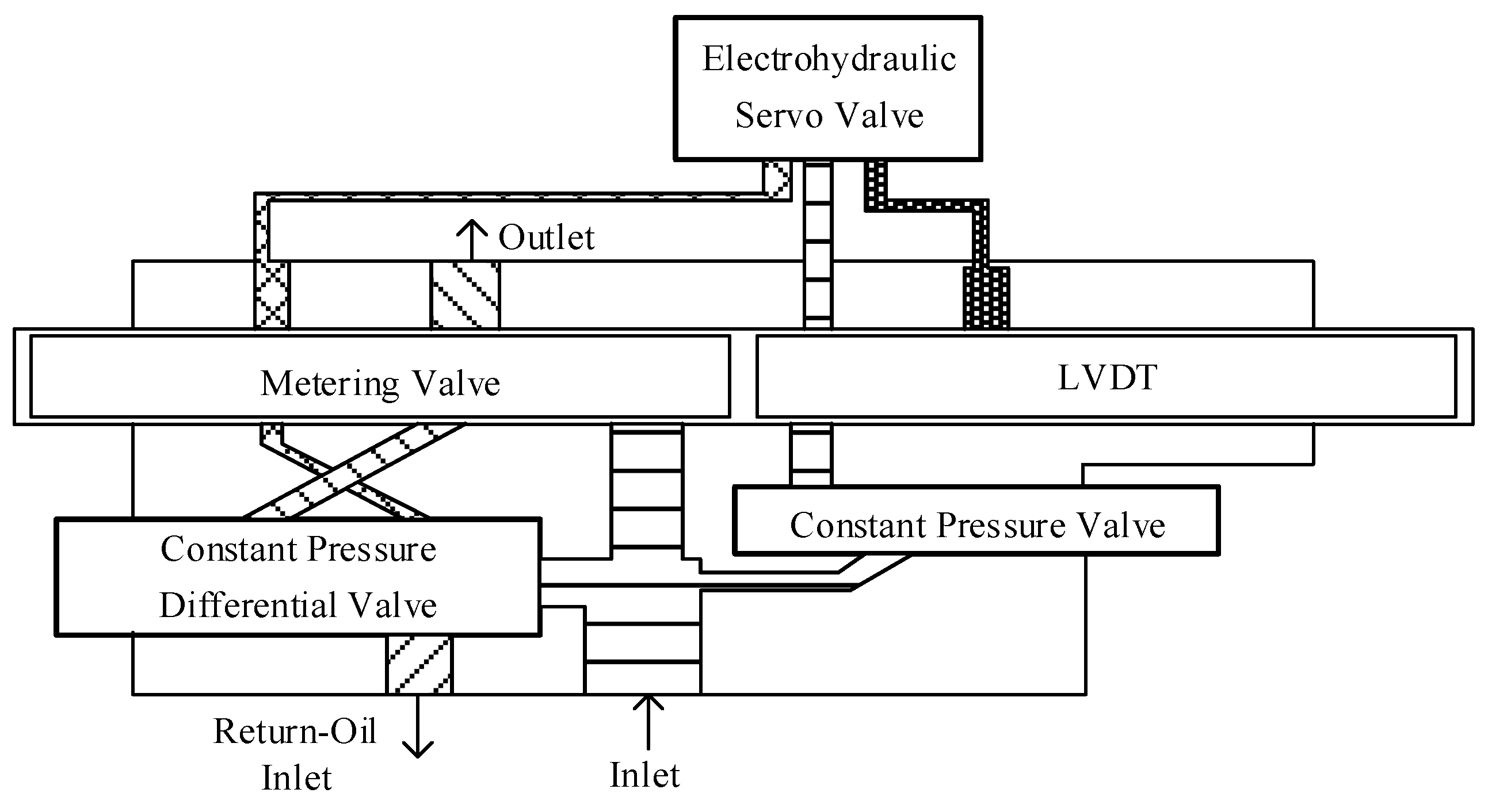
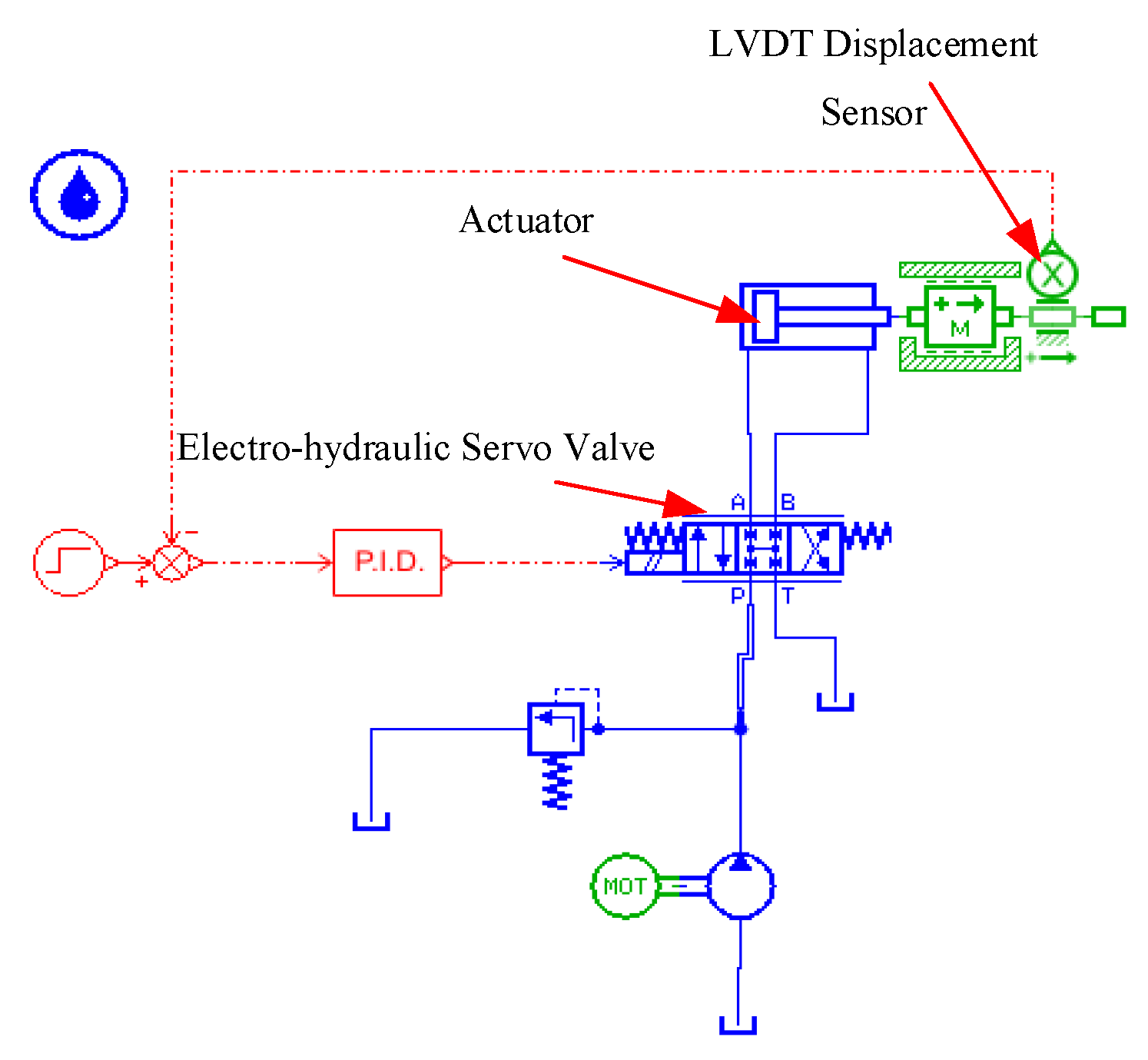
- The electro-hydraulic servo valve in the fuel actuator receives the driving current, drives the actuator barrel to move and the output fuel to drive the engine to run. A Linear Variable Differential Transformer (LVDT) sensor measures the displacement of the actuator barrel and feeds it back to the control law;
- (5)
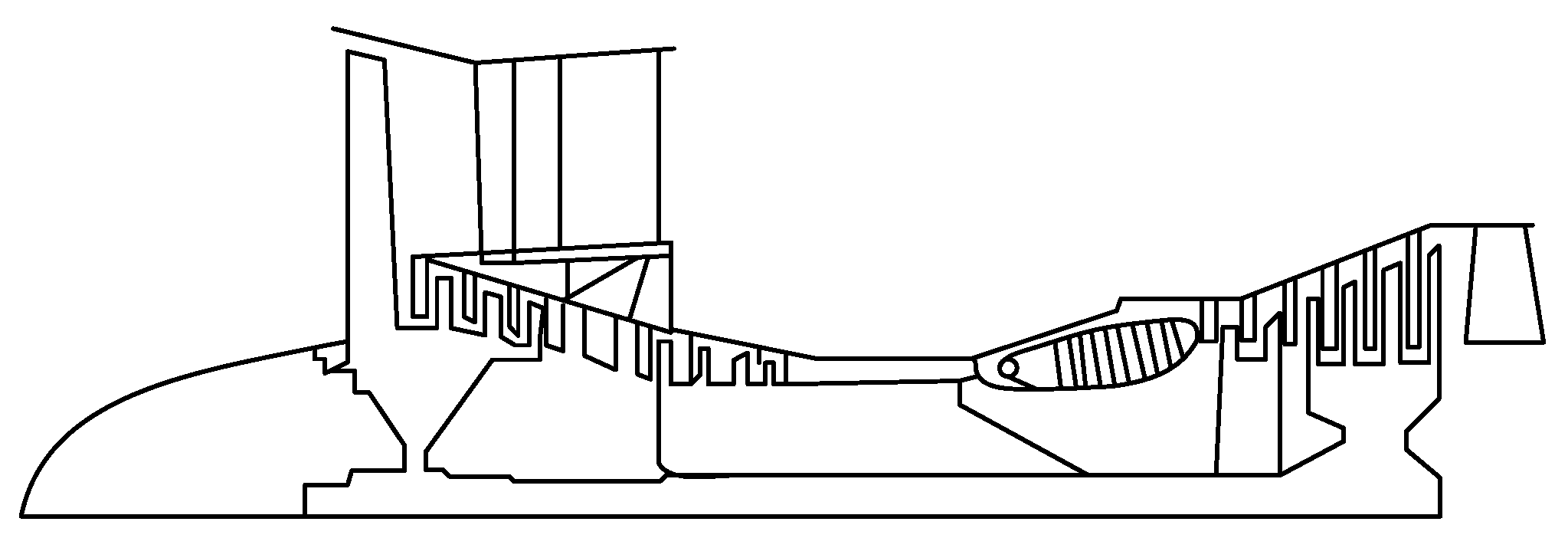
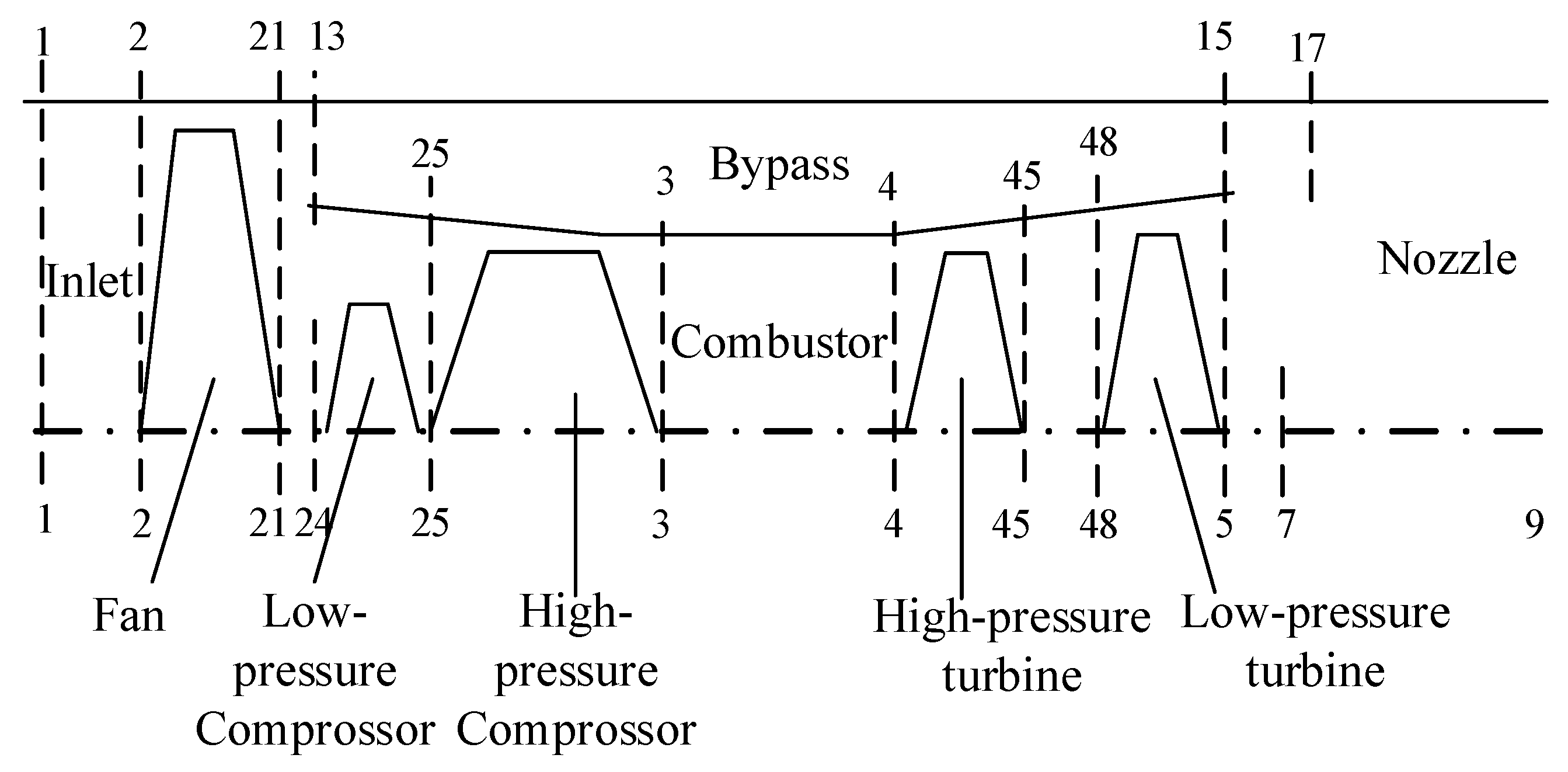
- The engine module is a component-level model of JT9D. It receives the fuel output from the fuel actuator and outputs the rotor speed.
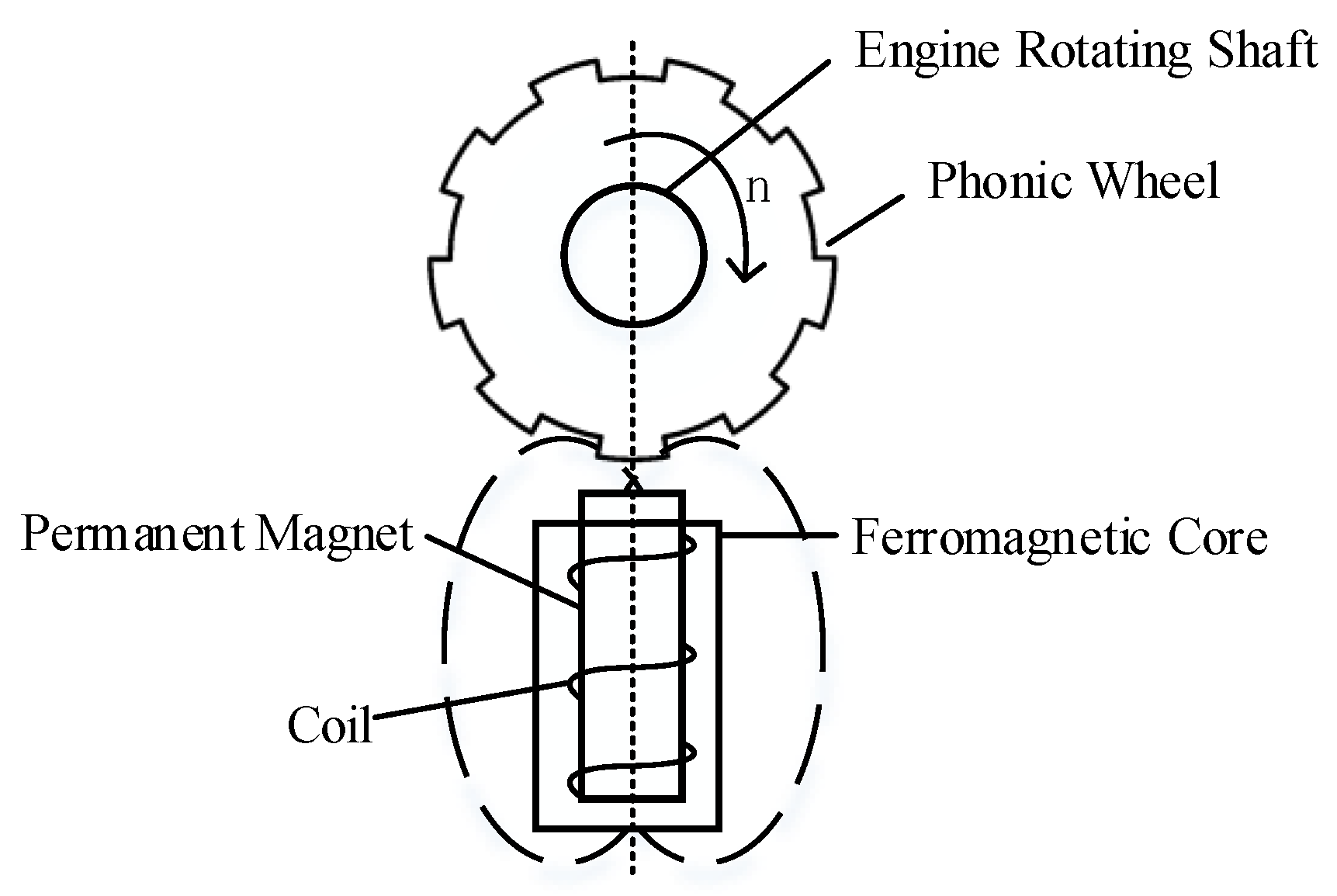
2.1. Establishment of the Rotor Speed Senor Model Using Simulink
2.2. Establishment of a Sensor Conditioning Circuit Model Using Modelica
2.3. Establishment of the Control Law Model Using Simulink
2.4. Establishment of a Fuel Metering Device Model Using Amesim
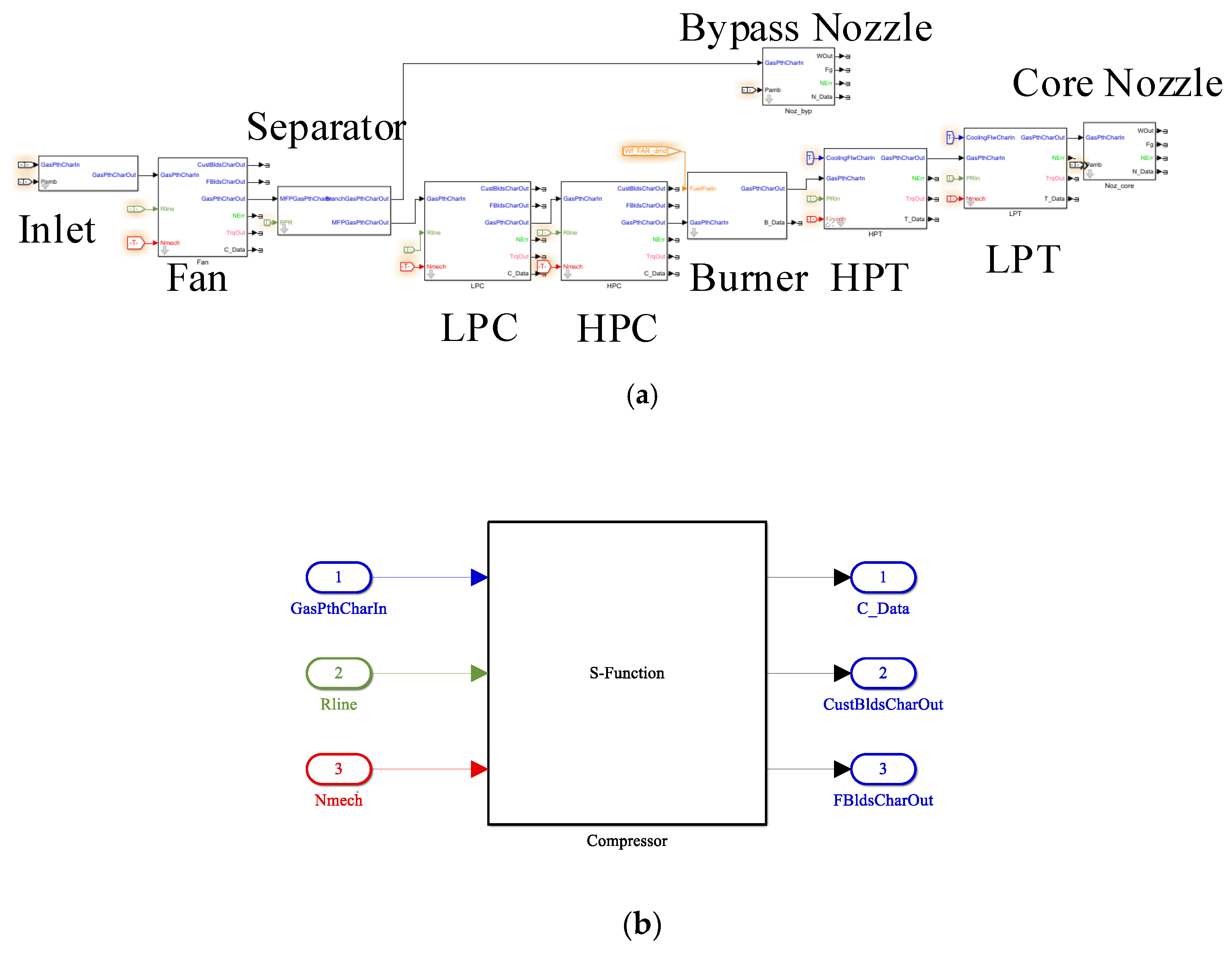
2.5. Establishment of an Engine Model Using Simulink and C Language
3. Full Digital Co-Simulation of the Control System in FMI
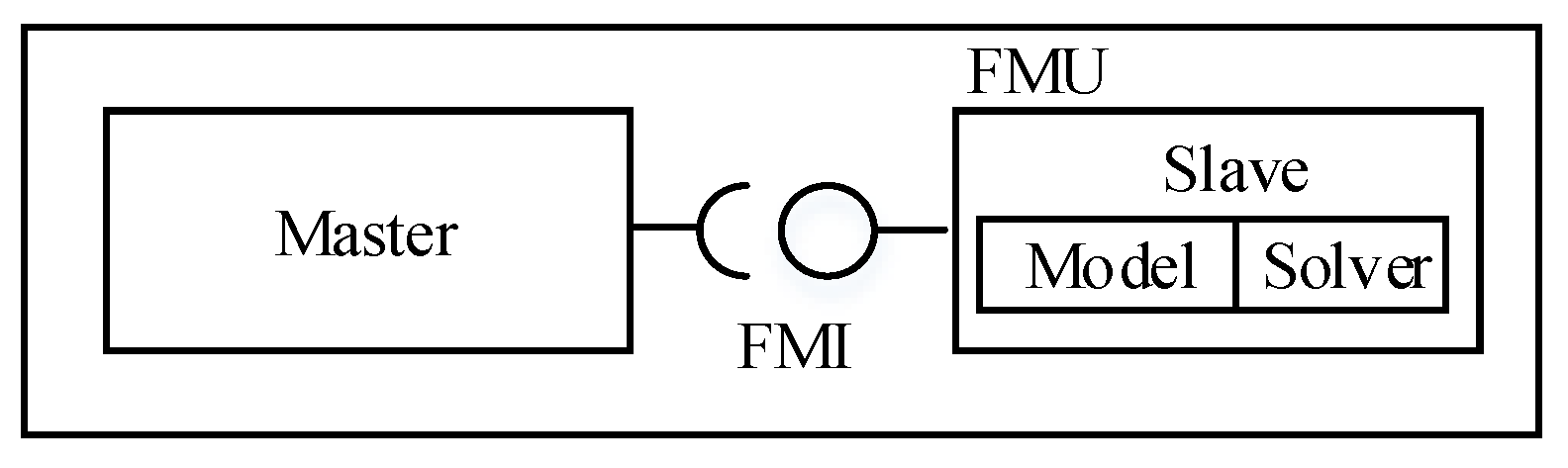
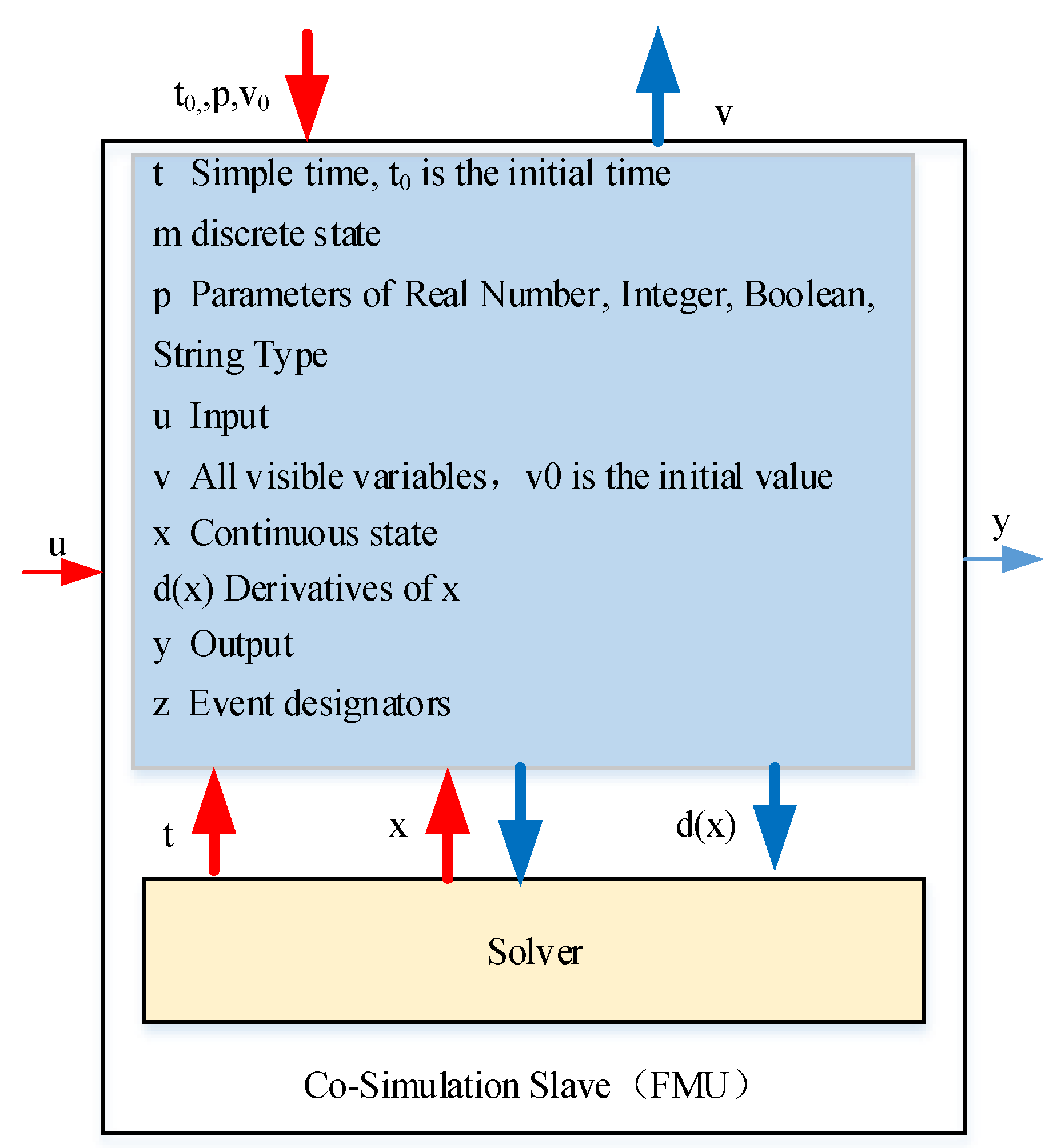
3.1. Introduction of FMI and Its Simulation Mechanism
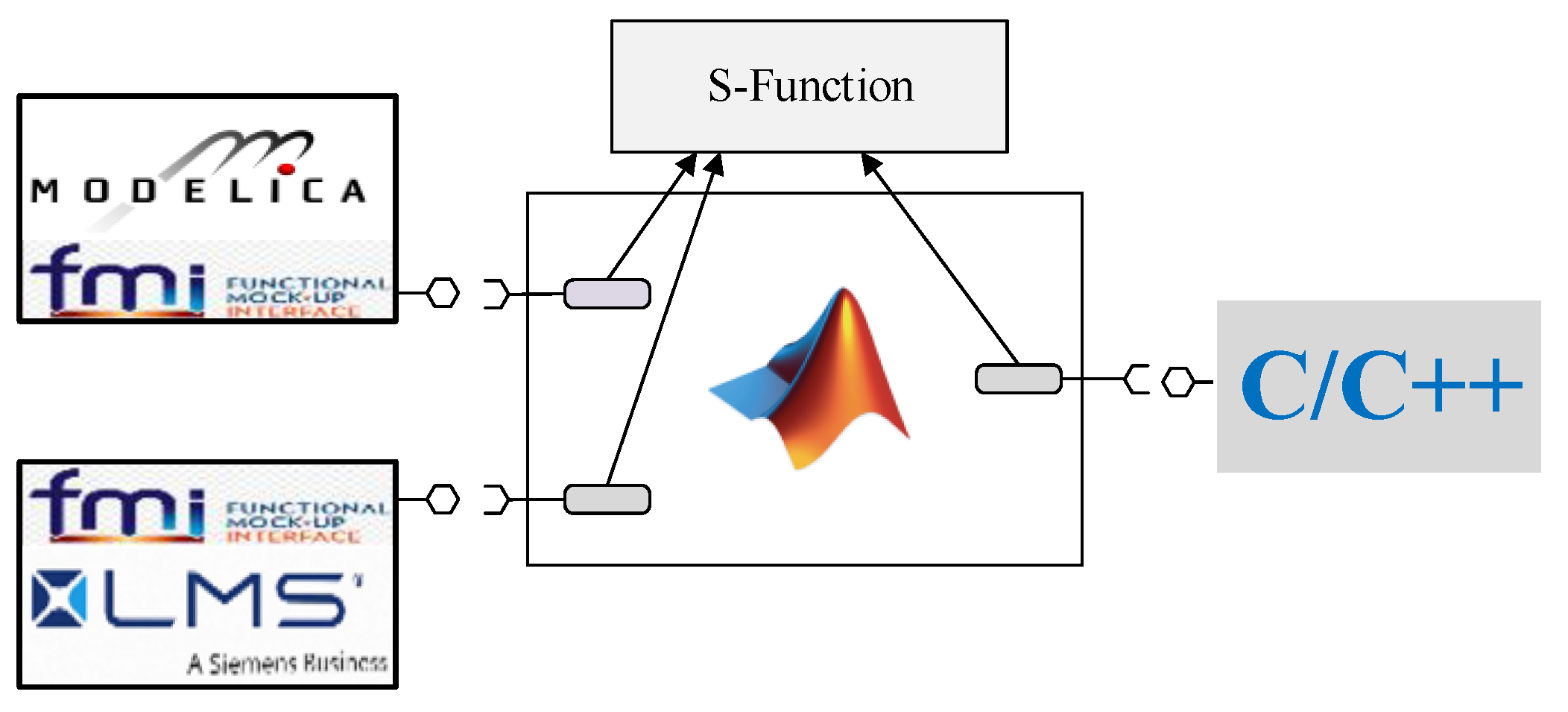
3.2. Full Digital Co-Simulation
4. Integration and Verification on the HIL Simulation Platform
4.1. Introduction of the HIL Real-Time Simulation Test Platform
- (1)
- The first part is the IPC (Industrial Personal Computer), which mainly includes the data acquisition and monitoring system, main control platform, engine model real-time operation platform, and actuator model real-time operation platform. They are mainly used for monitoring data and running real-time models.
- (2)
- The second part is the data acquisition system, which is mainly responsible for collecting data from the IPC and controller.
- (3)
- The third part is the signal conditioning device, which receives data from the data acquisition system and simulates it as a real sensor signal.
- (4)
- The fourth part is the electronic controller, which receives the signals from sensors and calculates the control variables. The data acquisition samples every 5 milliseconds from the controller.
- (5)
- The fifth part is the load simulator, which receives the output of controller, and the data acquisition system collects its output and returns it to the IPC to complete the closed-loop simulation.
- (6)
- The sixth part is the system test adapter, which provides the function of fault injection.
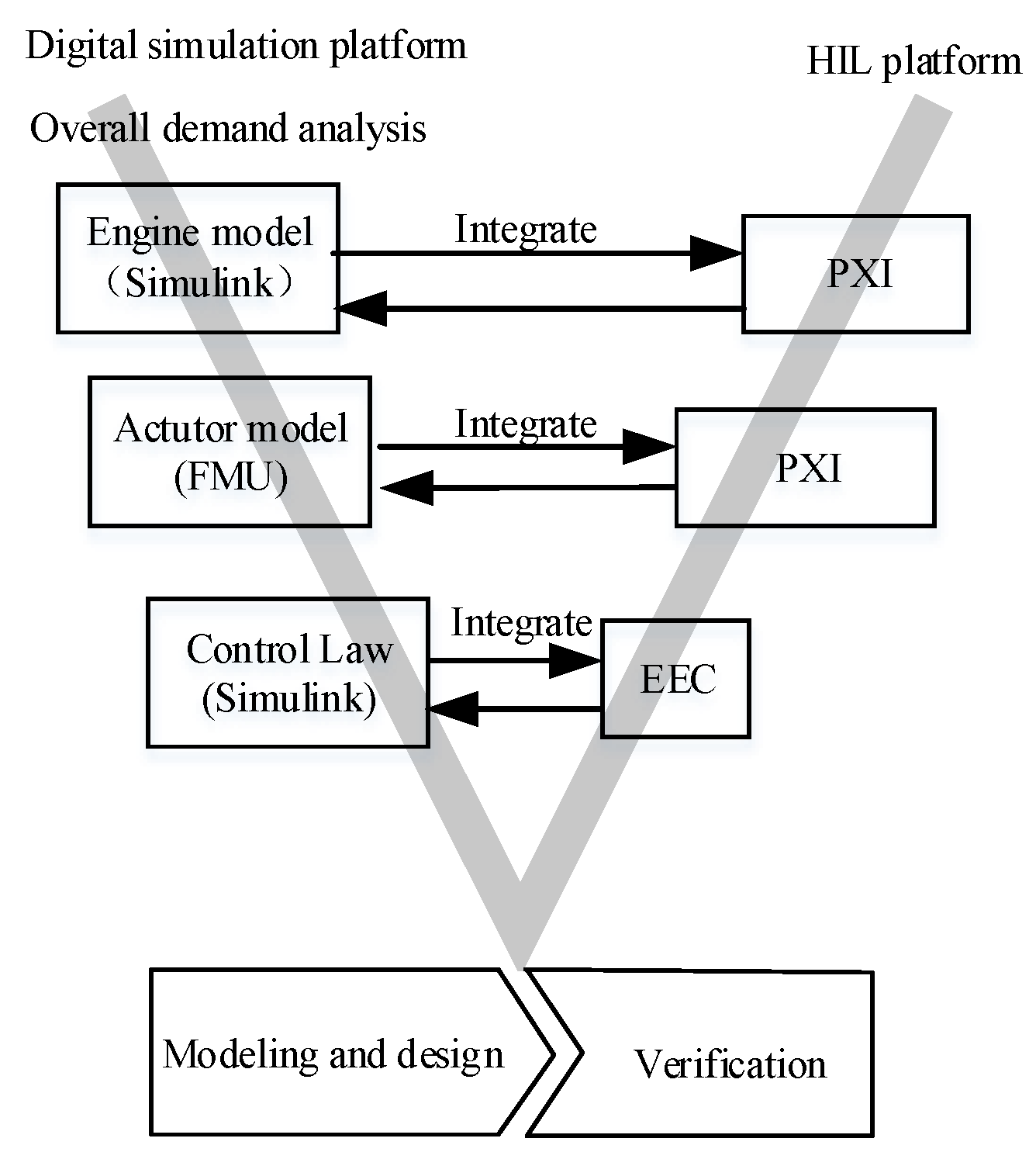
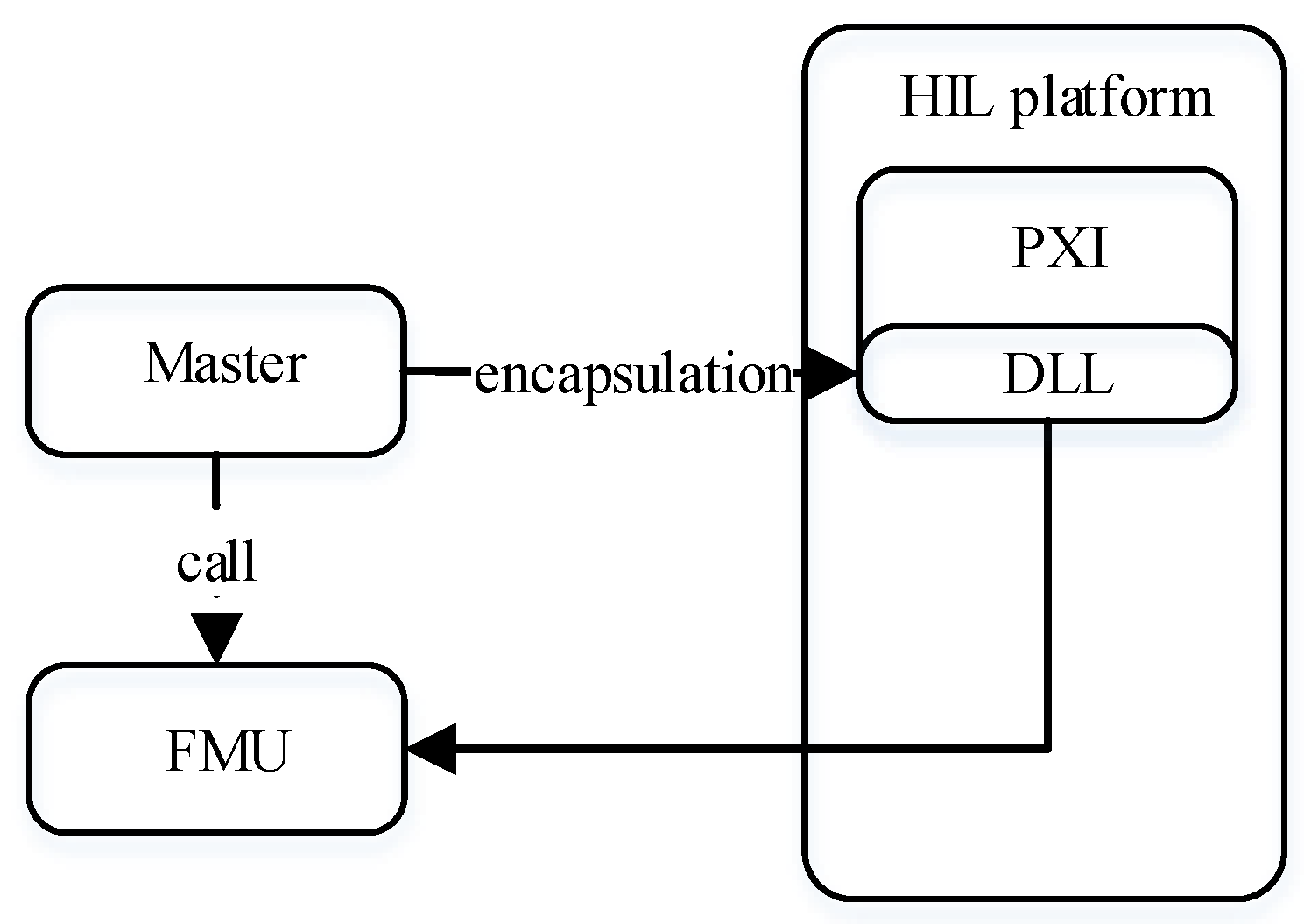
4.2. Overall Scheme of Integration of the Multidisciplinary Model and Control Law on the HIL Platform
4.3. FMU Master Control Program
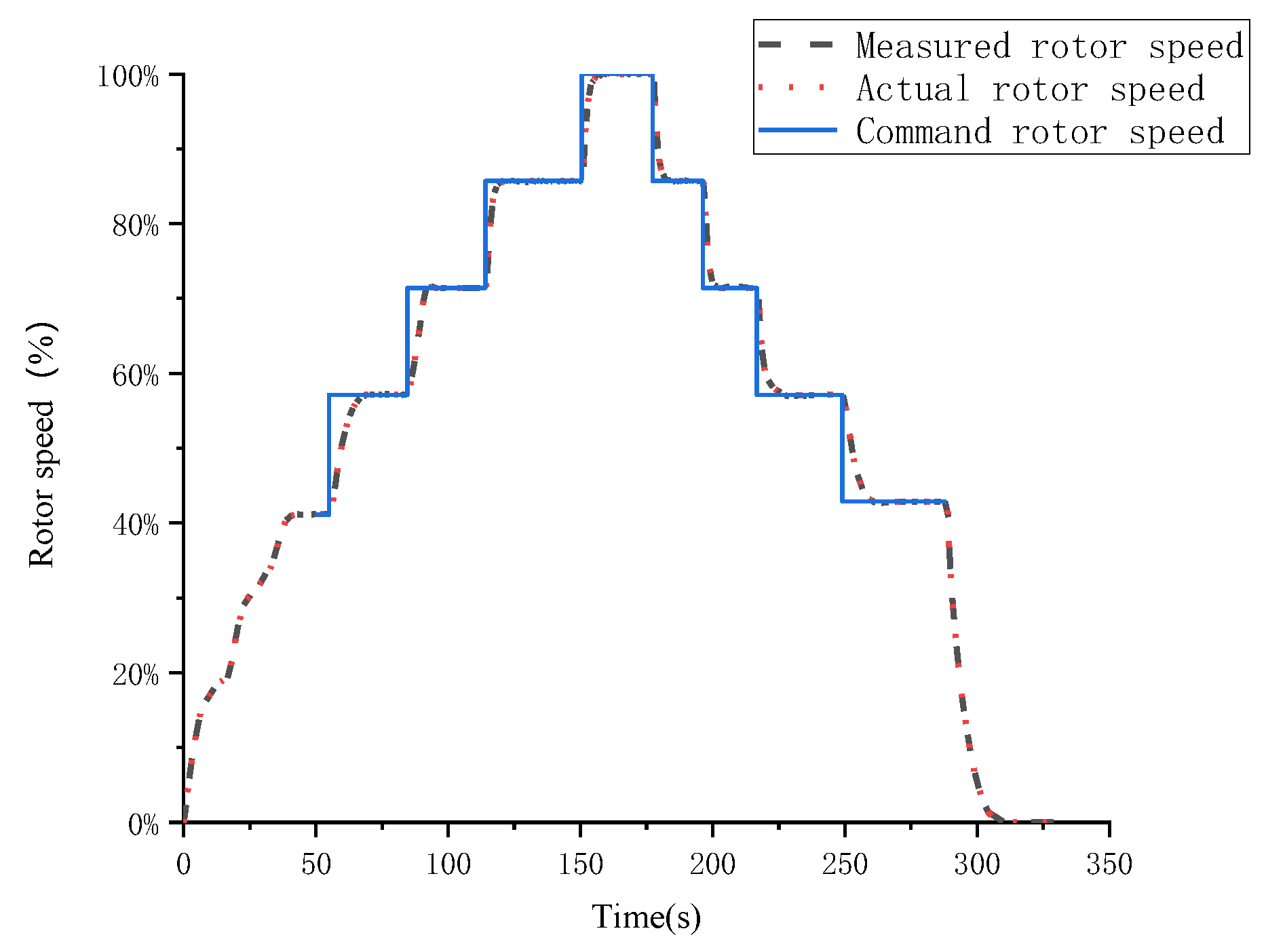
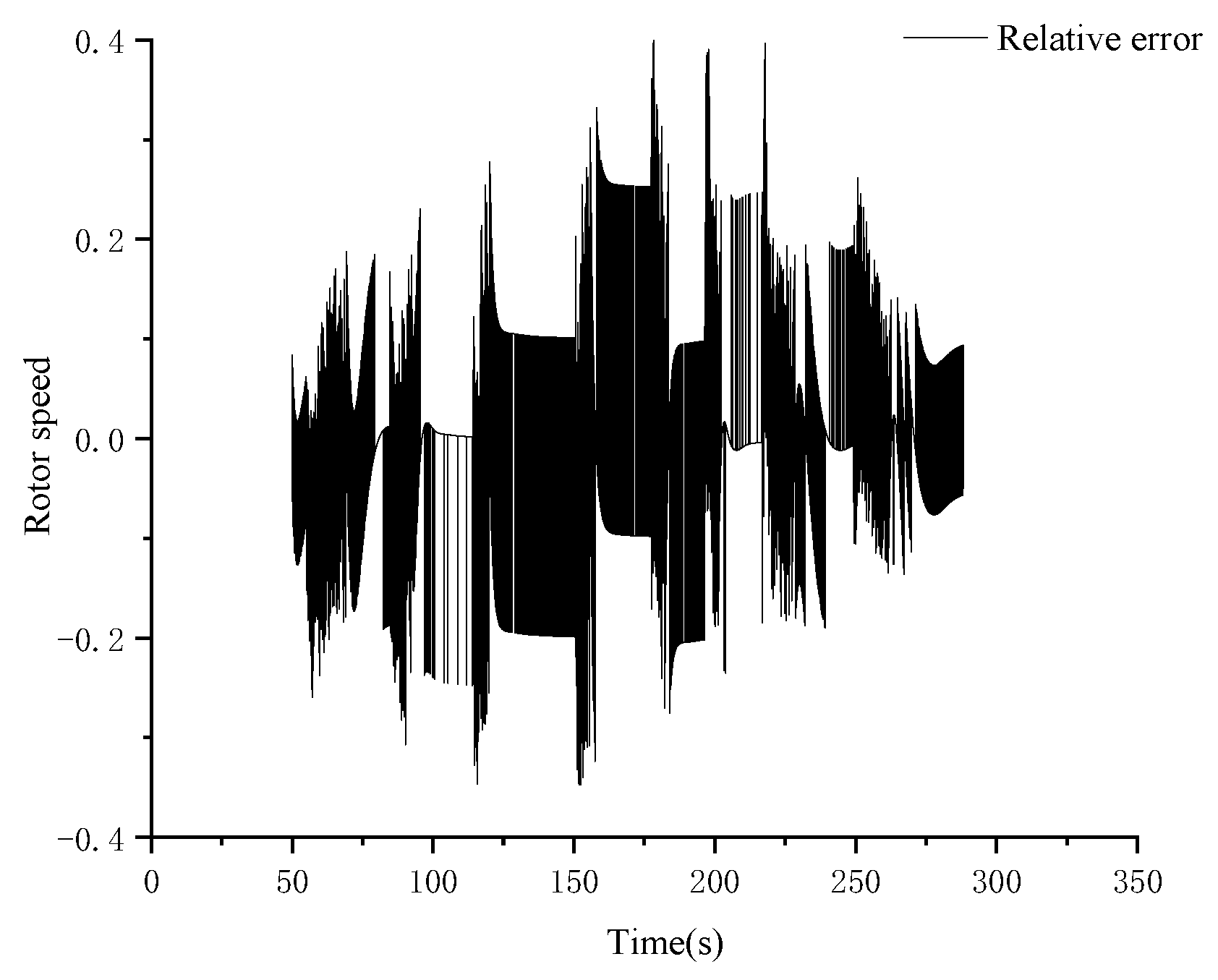
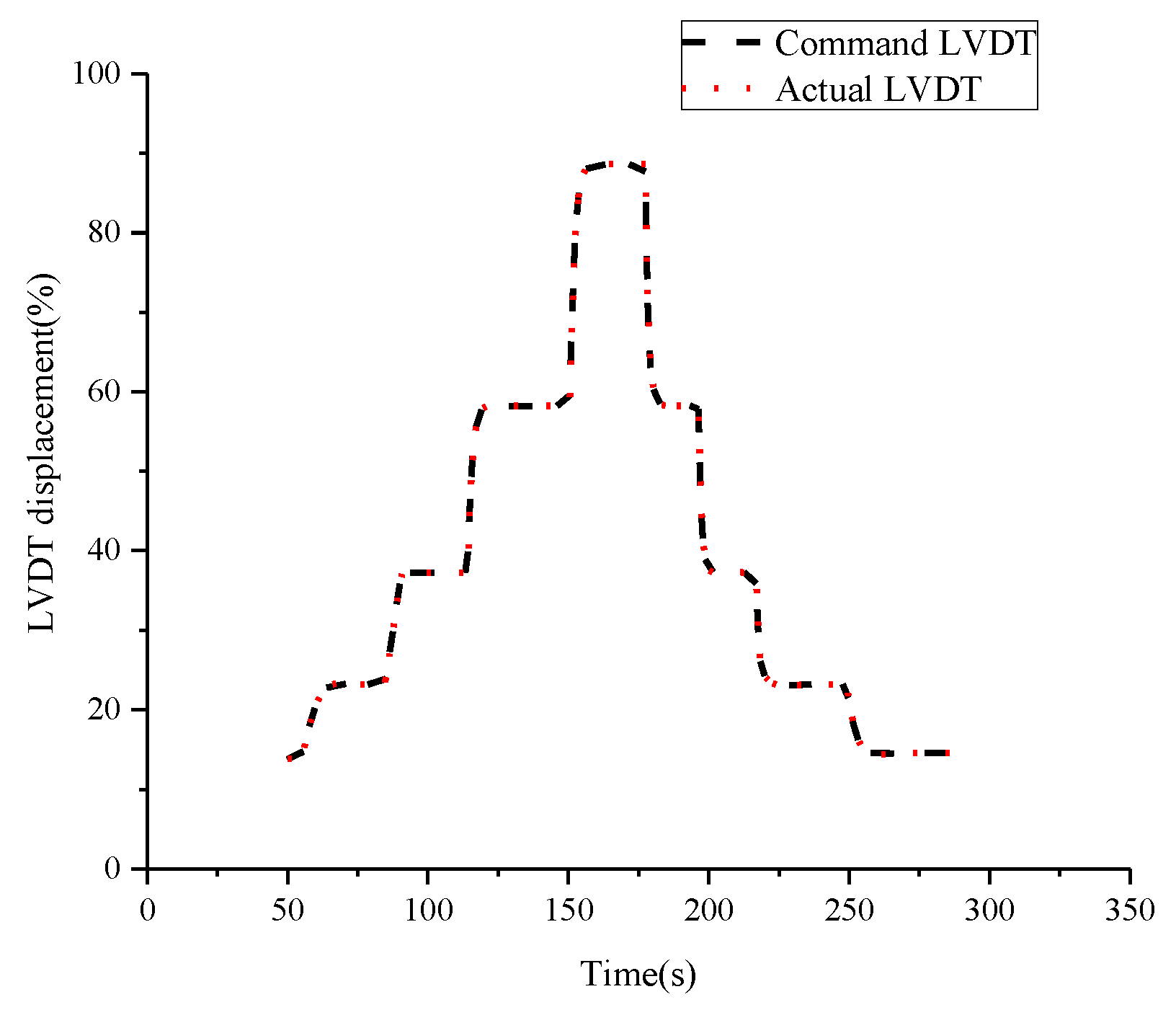
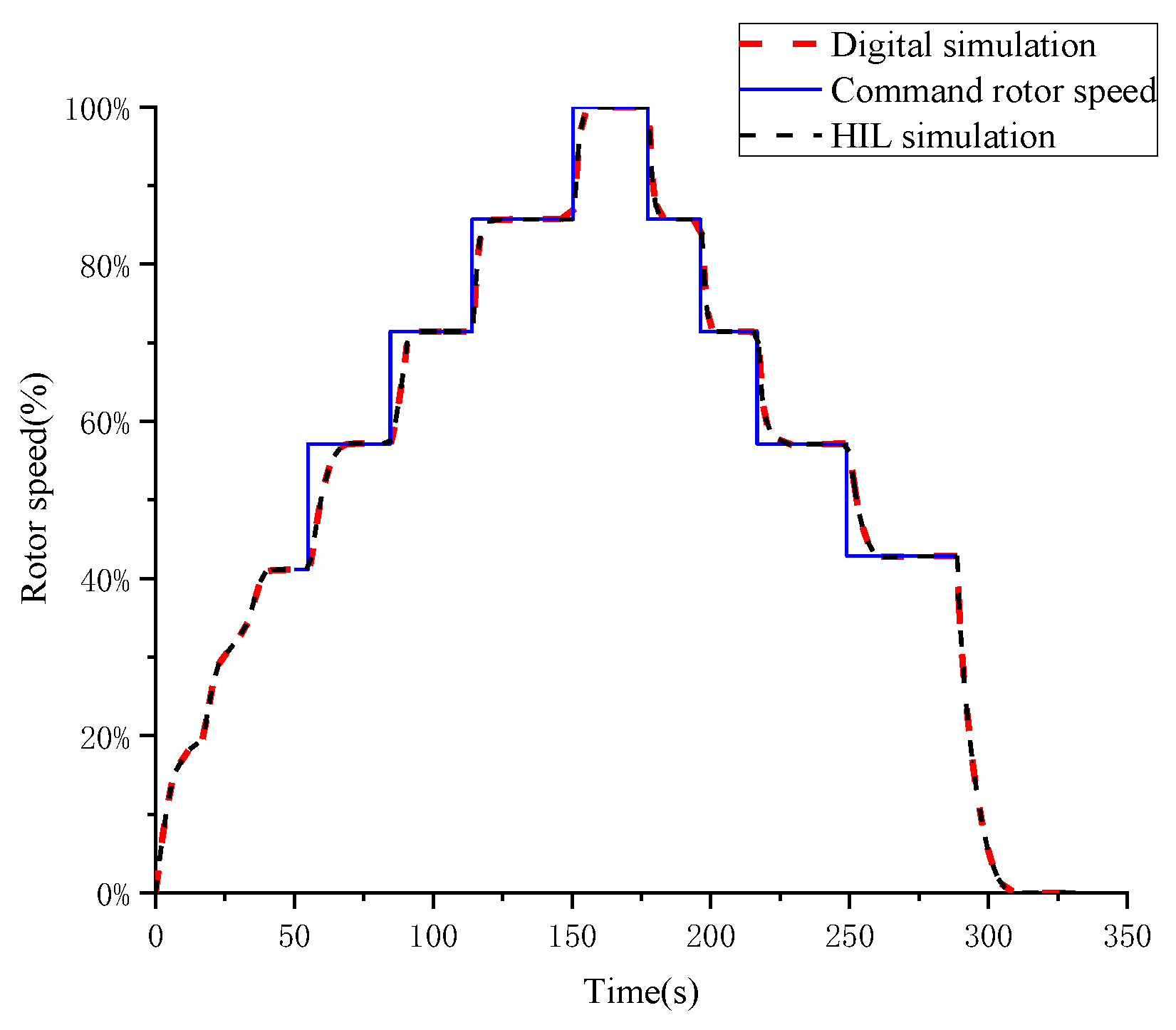
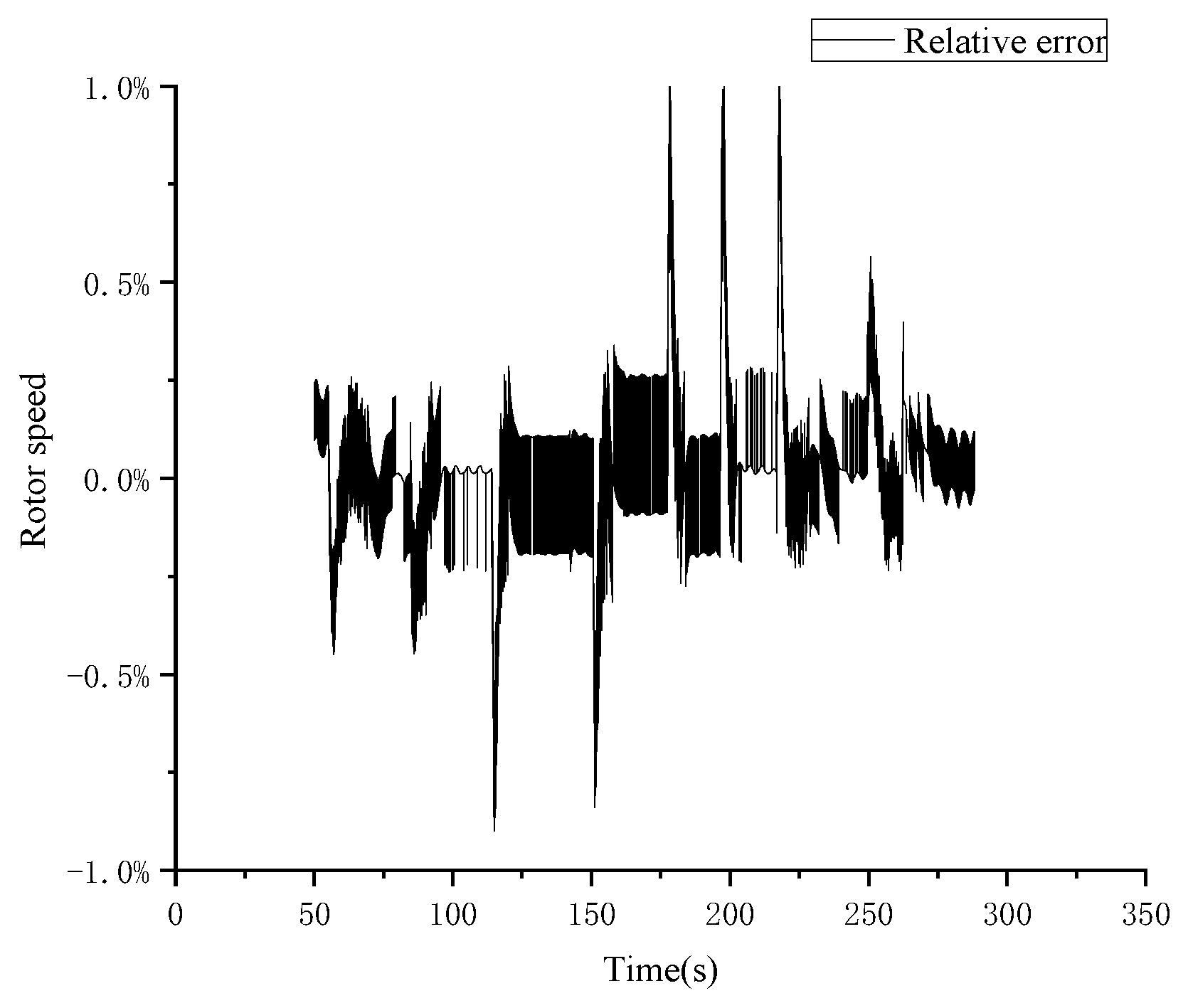
4.4. Simulation Result
5. Conclusions
Author Contributions
Funding
Institution Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, D.; Lu, J.Z.; Wang, L.; Li, J. Research of model-based aeroengine control system design structure and workflow. Procedia Eng. 2015, 99, 788–794. [Google Scholar] [CrossRef] [Green Version]
- Lu, J.Z.; Ding, J.W.; Zhou, F.L.; Xiong, G. Research of tool-coupling based electro-hydraulic system development method. In Proceedings of the 6th International Asia Conference on Industrial Engineering and Management Innovation, Tianjin, China, 25–26 June 2015; Atlantis Press: Paris, France, 2016; pp. 213–224. [Google Scholar]
- Lytle, J.; Follen, G.; Naiman, C.; Evans, A.; Veres, J.; Owen, K.; Lopez, I. Numerical Propulsion System Simulation (NPSS) 1999 Industry Review; NASA: Washington, DC, USA, 2000. [Google Scholar]
- Wang, Y.; Gu, G.Q. Summary of CORBA Technique. Comput. Sci. 1999, 26, 1–6. (In Chinese) [Google Scholar]
- Xu, Z.D.; Wang, J.Y.; Zheng, H. Summary of HLA and the key technologies in simulation applications. Comput. Simul. 2001, 18, 21–23. (In Chinese) [Google Scholar]
- Tian, H.F. Functional mock-up interface (FMI) standard. In Proceedings of the 2011 International Conference on Information, Services and Management Engineering (ISME 2011), Beijing, China, 26–28 December 2011. [Google Scholar]
- Yu, L.; Ye, Z.F. AMESim modeling of aero-engine fuel metering device. Mod. Mach. 2014, 5, 26–29. (In Chinese) [Google Scholar]
- Wu, Z. Design of Parameter of Electric Control Augmented-Fuel System of Aero-Engine; Nanjing University of Aeronautics and Astronautics: Nanjing, China, 2007. [Google Scholar]
- Li, H.; Zhang, H.; Li, Y.; Ma, Y. Research on Real Time Modeling of Aero-Engine Actuators; Control Engineering of China: Beijing, China, 2015; Volume 22, pp. 747–751. (In Chinese) [Google Scholar]
- Li, Y.; Zhu, B.; Zhang, W. Simulink Dynamic System Modeling and Simulation Foundation; Xi’an University of Electronic Science and Technology: Xi’an, China, 2004. [Google Scholar]
- Gu, H.Y.; Bao, Y.J.; Lin, Q.; Zhang, F. Electronic circuit simulation based on modelica. Res. Explor. Lab. 2010, 29, 263–266. (In Chinese) [Google Scholar]
- Wang, X.F.; Guo, Y.Q. Design and simulation of rotate speed sensor modulation circuit for aero-engine. Electron. Meas. Technol. 2007, 30, 150–152. (In Chinese) [Google Scholar]
- Cai, M.; Gras, H.; Mahseredjian, J.; Rutovic, E.; El-Akoum, A. Functional Mock-Up Interface-Based Approach for Parallel and Multistep Simulation of Electromagnetic Transients. IEEE Trans. Power Deliv. 2018, 33, 2978–2988. [Google Scholar] [CrossRef]
- Cech, M.; Konigsmarkova, J.; Reitinger, J.; Balda, P. Novel tools for model-based control system design based on FMI/FMU standard with application in energetics. In Proceedings of the 21st International Conference on Process Control, Strbske Pleso, Slovakia, 6–9 July 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 416–421. [Google Scholar]
- She, Z.L.; Li, C.H.; Fu, J.F. Characteristics simulation of aero-engine fuel piston pump based on AMESim. Microprocessors 2014, 4, 83–90. (In Chinese) [Google Scholar]
- Gu, N.; Ni, J.M. Simulation of Engine cooling system based on AMESim. In Proceedings of the 2nd International Conference on Information and Computing Science, Manchester, UK, 21–22 May 2009; IEEE: Piscataway, NJ, USA, 2009; Volume 4, pp. 117–120. [Google Scholar]
- Ren, Z.B.; Meng, G.; Wang, Y.X.; Jay, F. Modeling and performance simulation for gas generator of aeroengine based on Modelica and Dymola. Gas Turbine Exp. Res. 2005, 32, 36–39. (In Chinese) [Google Scholar]
- Tavernini, D.; Vacca, F.; Metzler, M.; Savitski, D.; Ivanov, V.; Gruber, P.; Sorniotti, A. An explicit nonlinear model predictive ABS controller for electro-hydraulic braking systems. IEEE Trans. Ind. Electron. 2019, 67, 3990–4001. [Google Scholar] [CrossRef]
- Zhang, J.; Lv, X.; Lv, Y. Research on Vehicle Control Strategy and Hardware in Loop for Pure Electric FSAE Vehicle. J. Phys. 2021, 1732, 012172. [Google Scholar]
- Zhao, Y. Integrated Simulation Platform Based on Functional Mockup Interface and Its Application on Aerospace Engineering; Harbin Institute of Technology: Harbin, China, 2013. [Google Scholar]
- Yao, Y.C.; Zhou, W.H. Drivetrain model in loop simulation based on FMI standard. J. Mech. Electr. Eng. 2017, 34, 938–942. (In Chinese) [Google Scholar]
- Zhao, J.J.; Ding, J.W.; Zhou, F.L.; Chen, L. Modelica and its mechanism of multi-domain unified modeling and simulation. J. Syst. Simul. 2006, 18, 570–573. (In Chinese) [Google Scholar]
- Chen, X.; Wei, Z. A new modeling and simulation platform-Mworks for electrical machine based on modelica. In Proceedings of the 2008 International Conference on Electrical Machines and Systems, Wuhan, China, 17–20 October 2008. [Google Scholar]
- Chapman, J.W.; Lavelle, T.; May, R.D.; Litt, J.S.; Guo, T.H. Propulsion system simulation using the toolbox for the modeling and analysis of thermodynamic systems (T-MATS). In Proceedings of the AIAA/ASME/SAE/ASEE Joint Propulsion Conference, Cleveland, OH, USA, 28–30 July 2014. [Google Scholar]
- Hu, X.Y. World Small and Medium Aero Engine Manual; Aviation Industry Press: Beijing, China, 2006; pp. 443–445. [Google Scholar]
- Stakolich, E.G.; Stromberg, W.J. JT9D performance deterioration results from a simulated aerodynamic load test. J. Aircr. 1981, 20, 650–658. [Google Scholar] [CrossRef]
- Gomes, C.; Thule, C.; Broman, D.; Larsen, P.G.; Vangheluwe, H. Co-simulation: A survey. Acm Comput. Surv. 2018, 51, 49. [Google Scholar] [CrossRef]
- Wang, H.; Lian, D.; Xu, J. Research on distributed co-simulation based on FMI. Comput. Simul. 2017, 34, 256–261. (In Chinese) [Google Scholar]





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
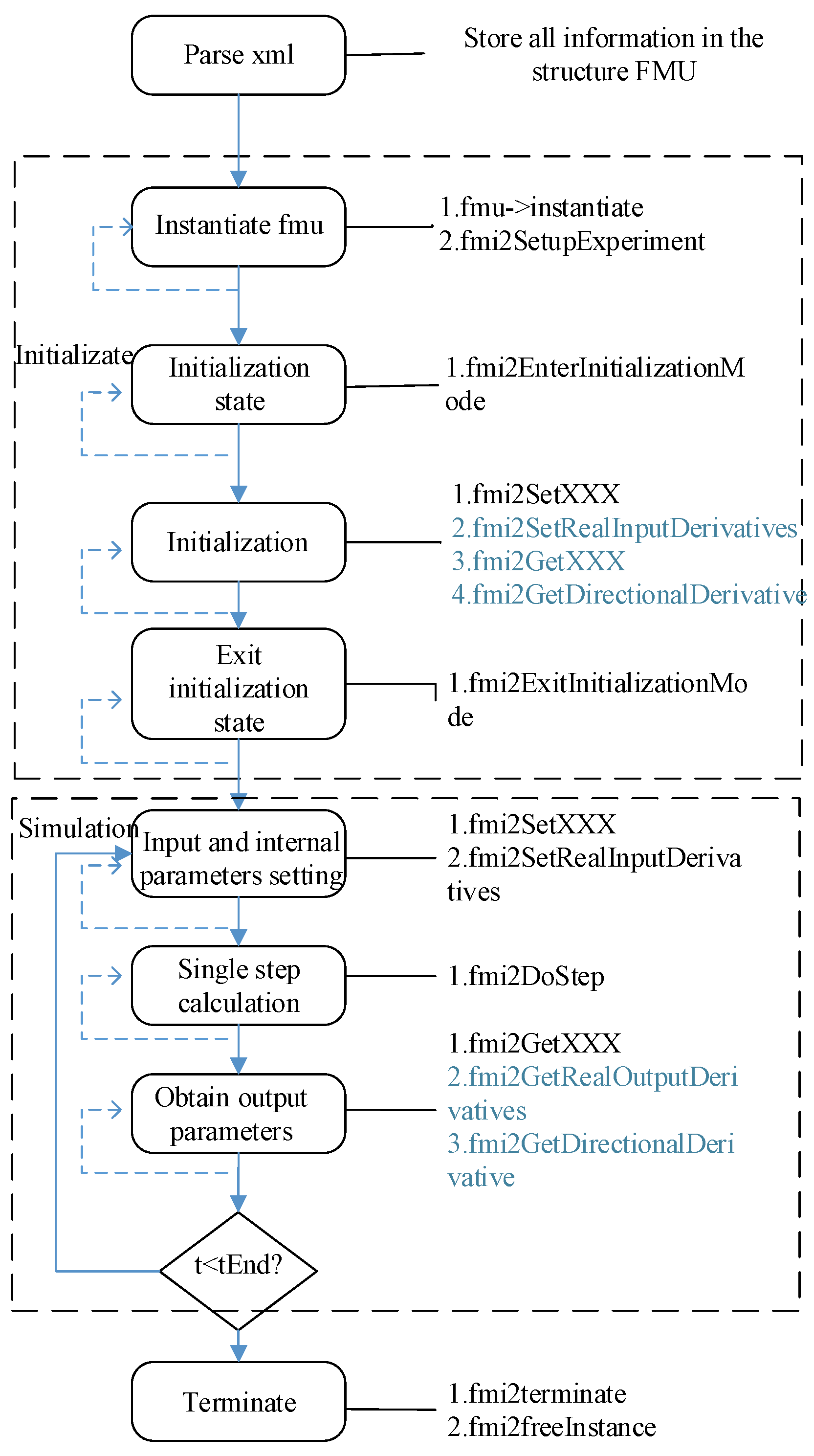
| Process | Name | Function |
|---|---|---|
| Instantiation | fmi2SetupExperiment | Initialize time and parameters |
| Initialization | fmi2EnterInitializationMode | Jump into initialization |
| fmi2ExitInitializationMode | Exit initialization | |
| Single step calculation | fmi2SetXXX | Input parameters |
| fmi2DoStep | One-step simulation | |
| fmi2GetXXX | Output parameters | |
| Termination | fmi2Terminated | Stop simulation |
| fmi2FreeInstance | Release examples |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fang, J.; Luo, M.; Wang, J.; Hu, Z. FMI-Based Multi-Domain Simulation for an Aero-Engine Control System. Aerospace 2021, 8, 180. https://doi.org/10.3390/aerospace8070180
Fang J, Luo M, Wang J, Hu Z. FMI-Based Multi-Domain Simulation for an Aero-Engine Control System. Aerospace. 2021; 8(7):180. https://doi.org/10.3390/aerospace8070180
Chicago/Turabian StyleFang, Juan, Maochun Luo, Jiqiang Wang, and Zhongzhi Hu. 2021. "FMI-Based Multi-Domain Simulation for an Aero-Engine Control System" Aerospace 8, no. 7: 180. https://doi.org/10.3390/aerospace8070180