
Human–Machine Interface Design for Monitoring Safety Risks Associated with Operating Small Unmanned Aircraft Systems in Urban Areas



Abstract
:1. Introduction
2. Related Work
2.1. Autonomous Flight Operation in Urban Airspace
2.2. Human–System Integration Challenges
2.3. Guidance of Visual Attention
2.4. Ecological Interface Design
2.5. Contribution of This Paper
- Derivation of specific display design principles that aim to adapt EID to reduce display complexity;
- implementation of design properties that support parallel visual search for detecting safety critical system states, while keeping the advantages of EID;
- application of the proposed display design principles to the design of an HMI enabling a UAS operator to deal with the unique safety challenges that arise from operating multiple autonomous sUAS simultaneously in low-altitude urban airspace; and
- mock-up evaluation of the display design concept and the designed HMI.
2.6. Structure of This Paper
3. Proposed Display Design Concept and Principles
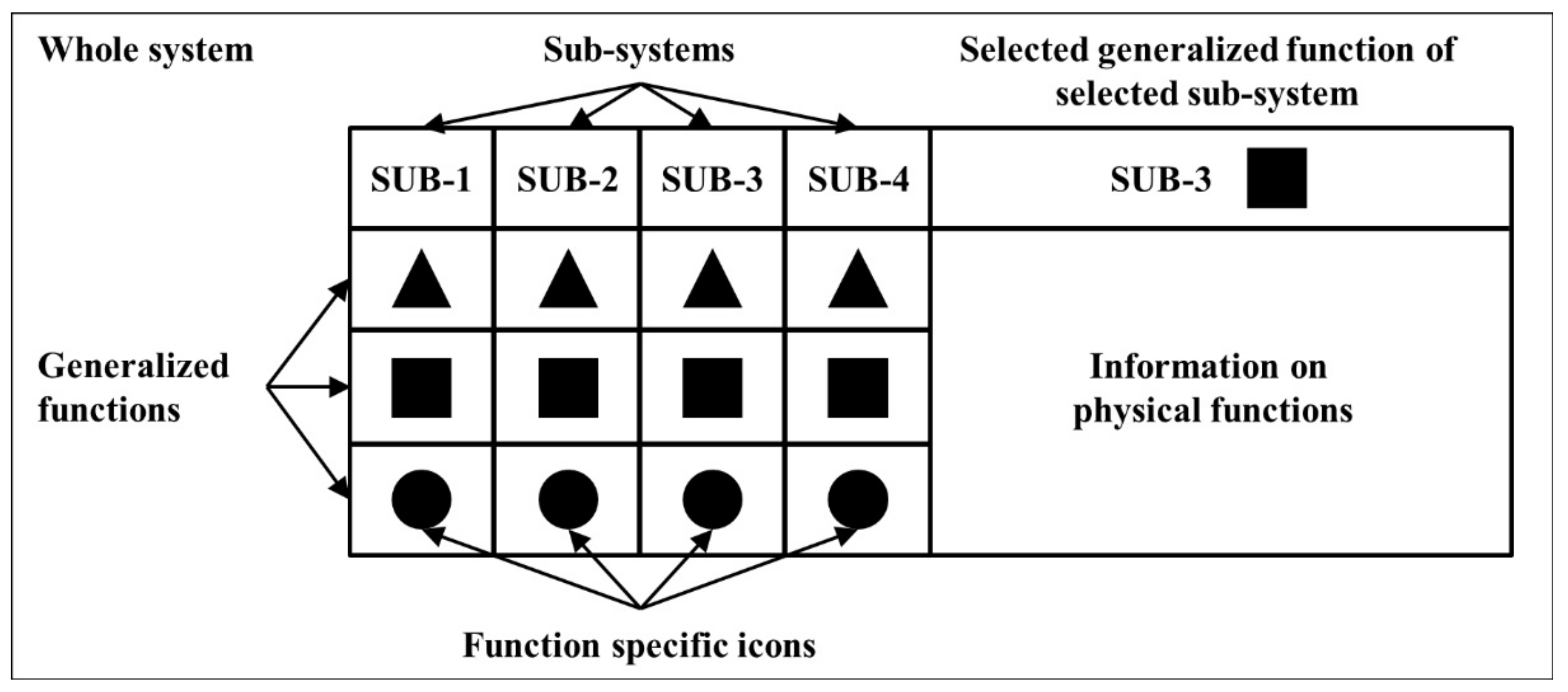
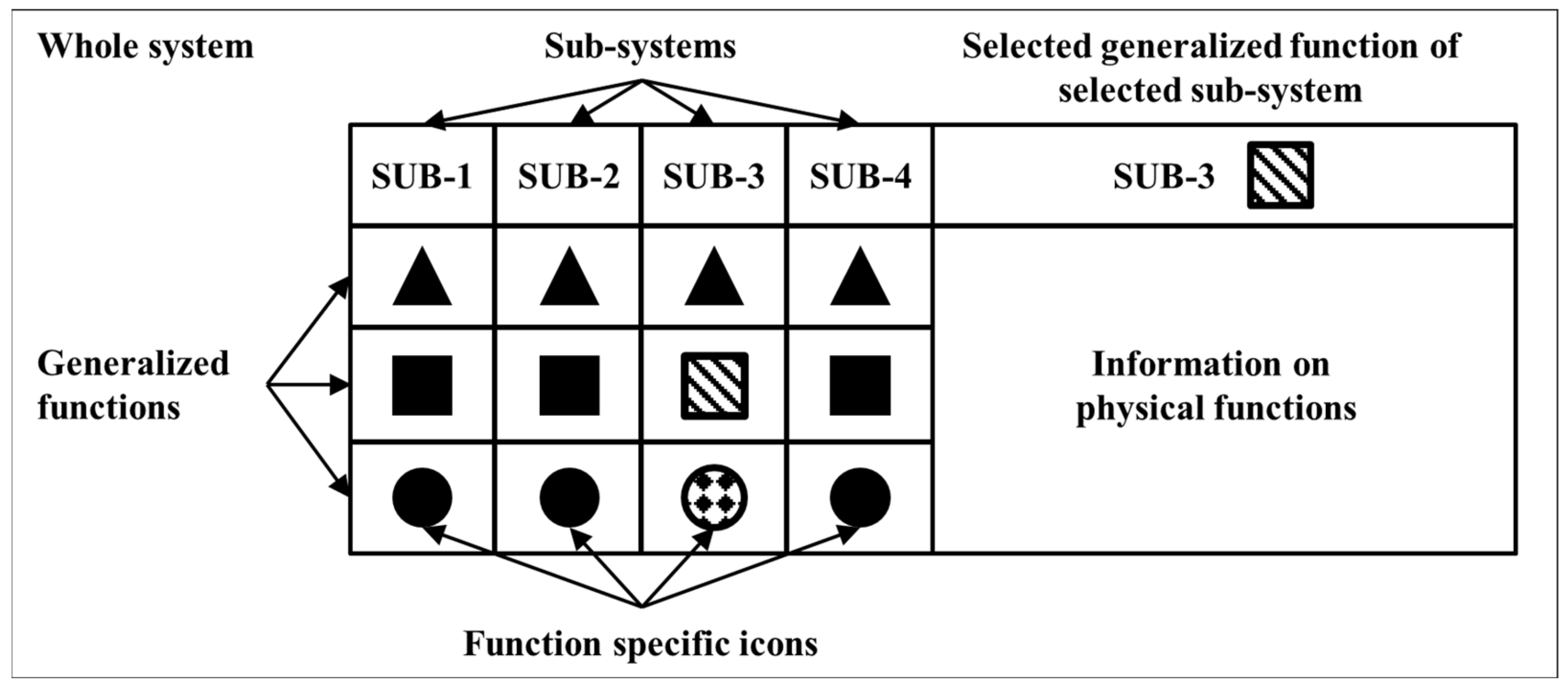
3.1. Design Principle 1: Hiding Information Depending on Levels of System Resolution and Functional Abstraction
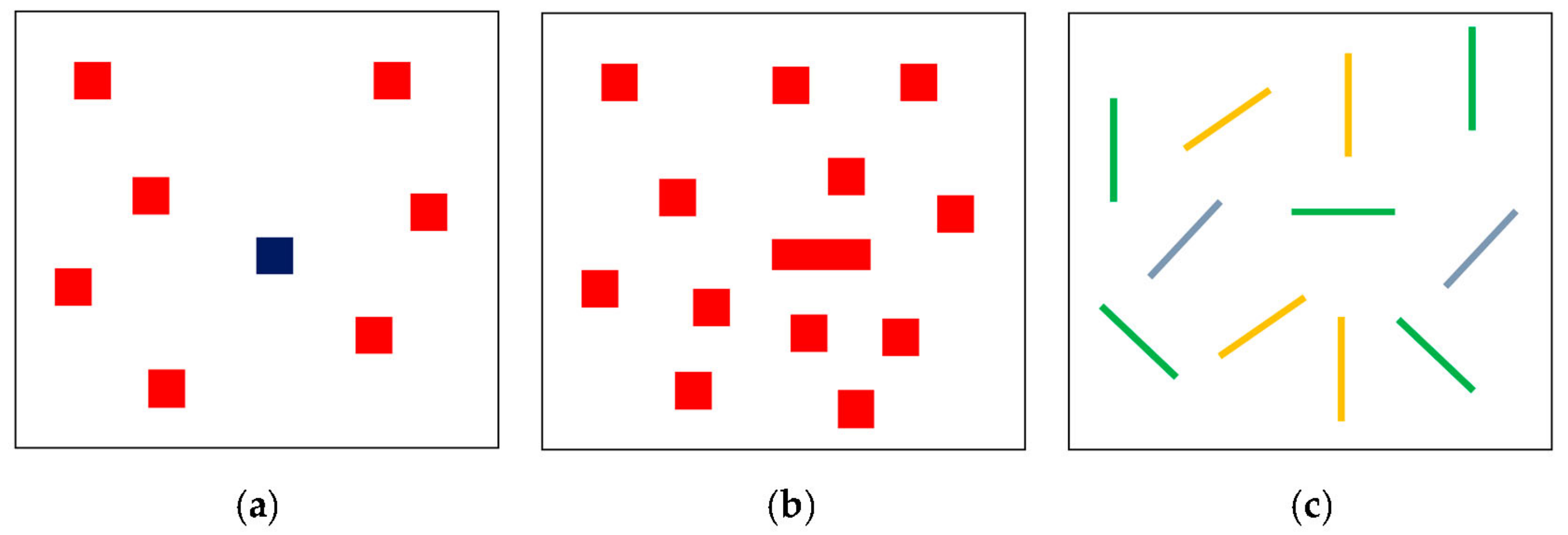
3.2. Design Principle 2: Support Parallel Visual Search Using Simple Icons and Well-Differentiable Hues
3.3. Design Principle 3: Arrange Icons in a Semantically Meaningful Pattern
3.4. Design Principle 4: Use Unambiguous and Meaningful Icons
3.5. Design Principle 5: Define Adequate System States
4. Application of Display Design Principles
4.1. Assumed System Capabilities
4.1.1. Geo-Fencing System
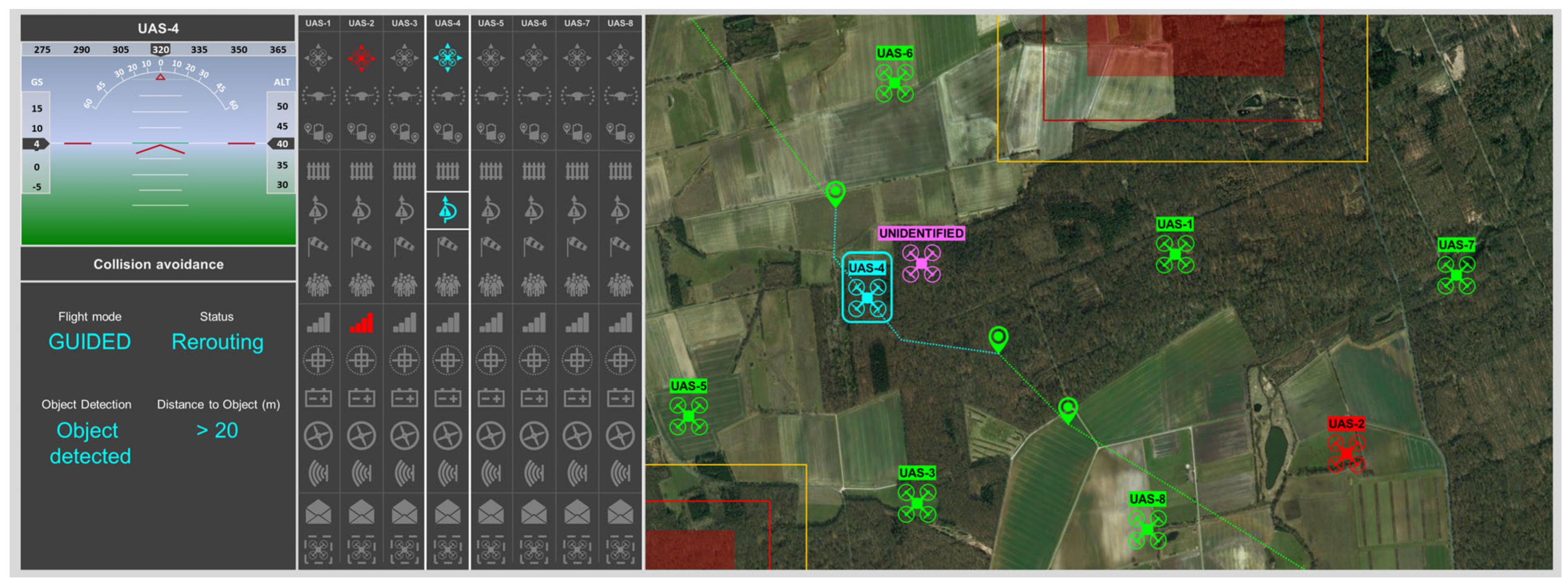
4.1.2. Autonomous Collision Avoidance System
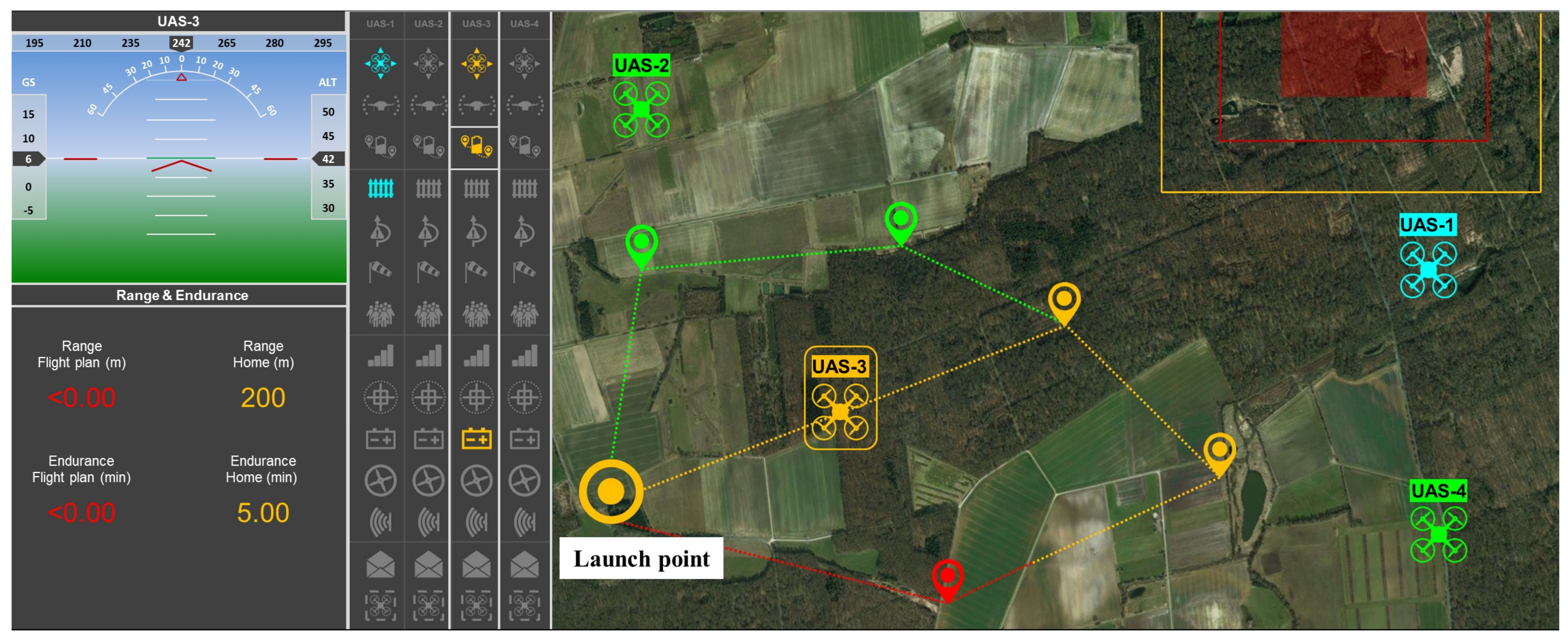
4.1.3. Casualty Risk Assessment System
4.1.4. Flying Time Prediction System
4.1.5. Real Time Sensor and Software Health Management
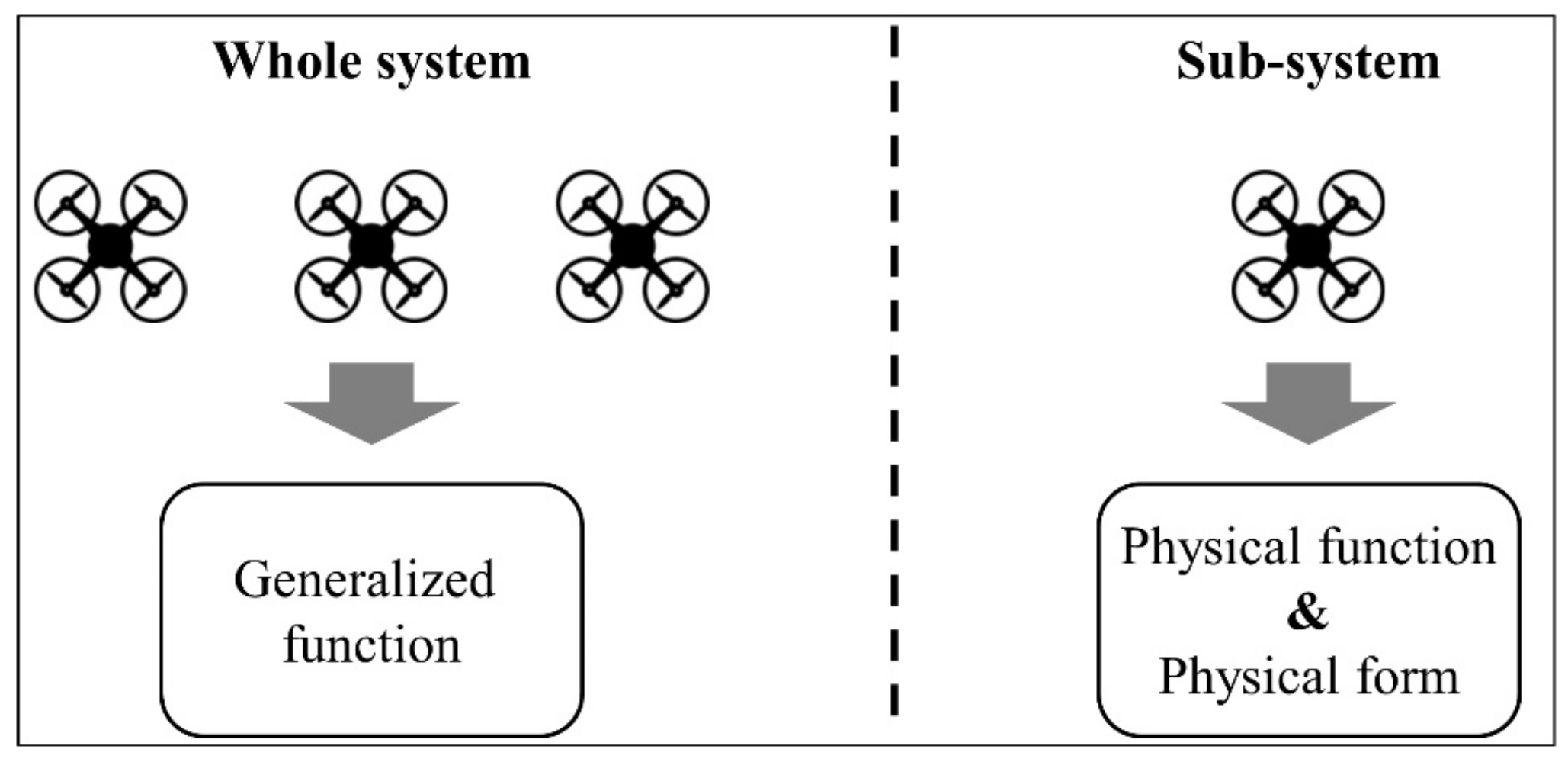
4.2. Definition of System Resolution Levels through System Decomposition (Design Principle 1)
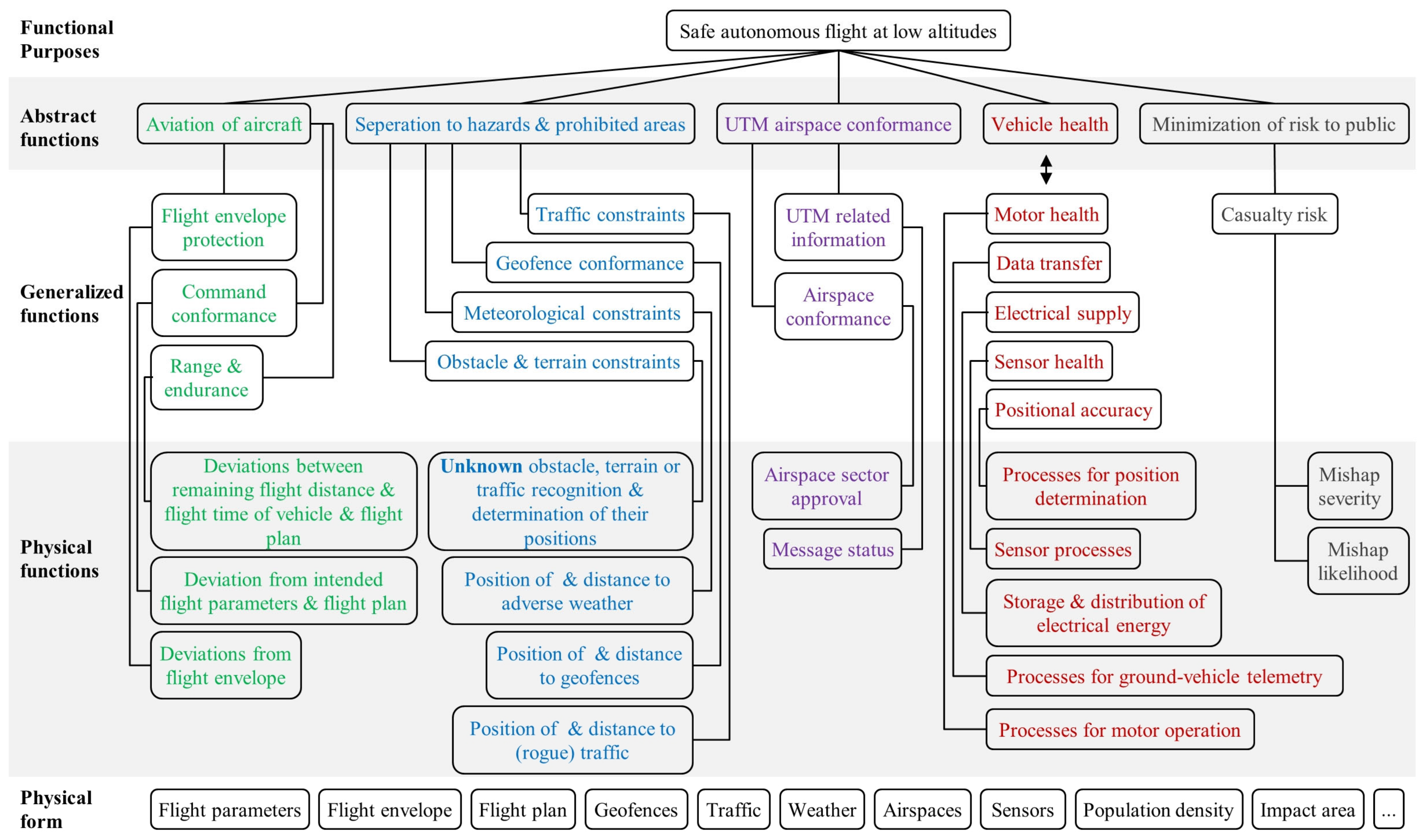
4.3. Functional Abstraction—The Abstraction Hierarchy (Design Principle 1)
4.3.1. Loss of Control—Aviation of Aircraft
4.3.2. Air Traffic-Related Risks—Separation to Hazards and Prohibited Areas
4.3.3. Flight Outside of Approved Airspace-UTM Airspace Conformance
4.3.4. Critical System Failures—Vehicle Health
4.3.5. Unsafe Proximity to People and Property—Minimization of Risk to the Public
4.4. Design of Unambiguous and Meaningful Icons (Design Principles 2, 3 and 4)
4.5. Definition of System States and Hues (Design Principles 2 and 5)
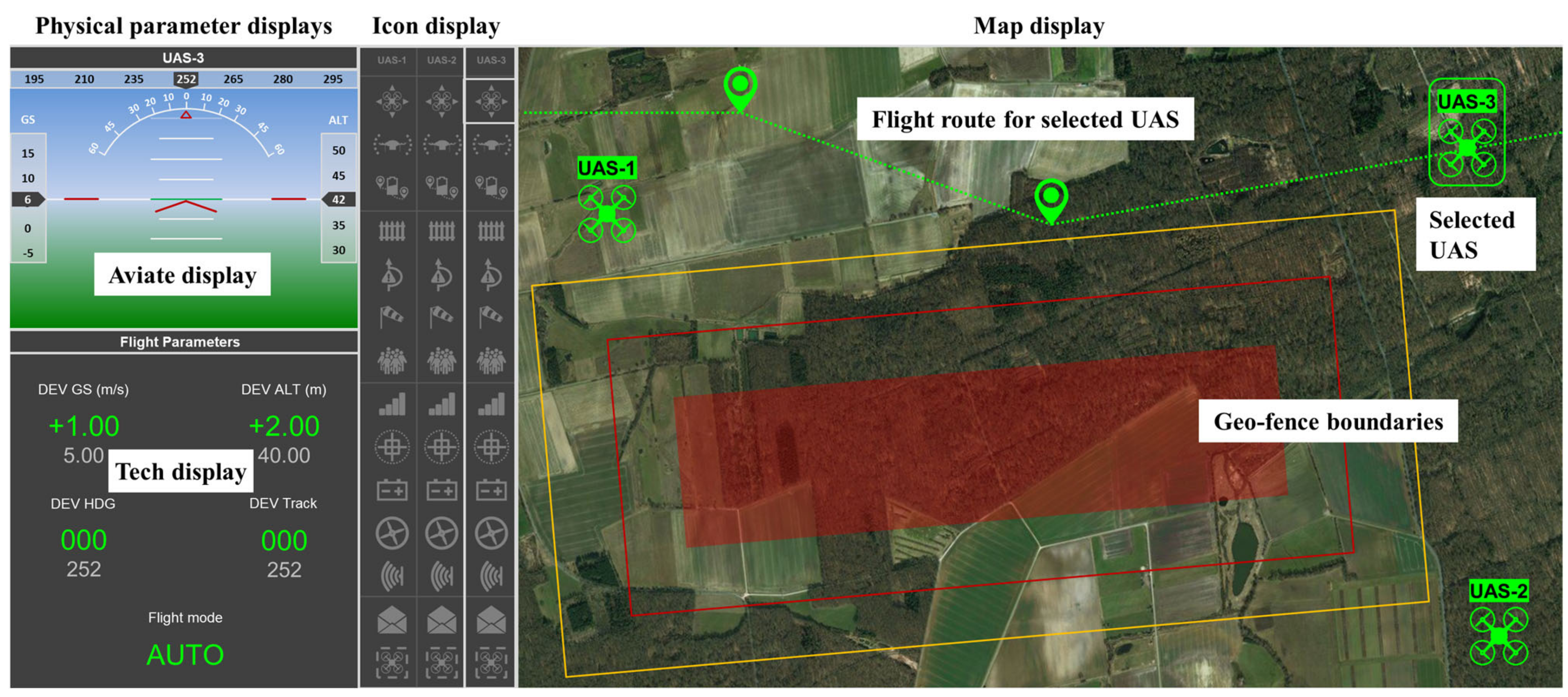
5. Final Display Layout
6. HMI Evaluation
6.1. Scenarios and Tasks
6.2. Dependent Variables
6.2.1. Performance
6.2.2. Display Complexity
6.2.3. Situation Awareness
6.2.4. Perceived Effort
6.3. Procedure
6.4. Participants
6.5. Results
6.5.1. Performance
6.5.2. Display Complexity
6.5.3. Situation Awareness & Perceived Effort
7. Discussion
7.1. Visualization Approach
7.2. Functional Decomposition Approach
7.3. Future Work
7.3.1. Further Evaluation Studies
7.3.2. Embedding the HMI into a Simulation Environment
7.3.3. Application to Other Use Cases
8. Conclusions
Author Contributions
Funding
Informed Consent Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ALT | Altitude |
| EID | Ecological Interface Design |
| DEV | Deviation |
| DGPS | Differential Global Positioning System |
| FAA | Federal Aviation Authority |
| HDG | Heading |
| GPS | Global Positioning System |
| GS | Ground Speed |
| HMI | Human–Machine Interface |
| MALE | Medium Altitude Long Endurance |
| NASA | National Aeronautics and Space Administration |
| RTL | Return to Launch |
| SASHA | Situation Awareness for Solutions for Human Automation Partnerships in European Air Traffic Management |
| SME | Subject Matter Expert |
| UAS | Unmanned Aircraft System |
| sUAS | Small Unmanned Aircraft System |
| UTM | Unmanned Aircraft Systems Traffic Management |
References
- Aweiss, A.S.; Owens, B.D.; Rios, J.L.; Homola, J.R.; Mohlenbrink, C.P. Unmanned Aircraft Systems (UAS) Traffic Management (UTM) National Campaign II. In Proceedings of the 2018 AIAA Information Systems-AIAA Infotech @ Aerospace, Kissimmee, FL, USA, 8–12 January 2018. [Google Scholar] [CrossRef] [Green Version]
- Peinecke, N.; Kuenz, A. Deconflicting the urban drone airspace. In Proceedings of the 2017 AIAA/IEEE 36th Digital Avionics Systems Conference (DASC), St. Petersburg, FL, USA, 16–21 September 2017. [Google Scholar] [CrossRef]
- Borst, C.; Flach, J.M.; Ellerbroek, J. Beyond ecological interface design: Lessons from concerns and misconceptions. IEEE Trans. Hum. Mach. Syst. 2015, 45, 164–175. [Google Scholar] [CrossRef]
- Feigh, K.M.; Pritchett, A.R. Requirements for effective function allocation: A critical review. J. Cogn. Eng. Decis. Mak. 2014, 8, 23–32. [Google Scholar] [CrossRef]
- Pritchett, A.R.; Kim, S.Y.; Feigh, K.M. Measuring human-automation function allocation. J. Cogn. Eng. Decis. Mak. 2014, 8, 52–77. [Google Scholar] [CrossRef] [Green Version]
- Sheridan, T.B.; Verplank, W.L. Human and Computer Control of Undersea Teleoperators. Massachusetts Inst of Tech Cambridge Man-Machine Systems Lab 1978. Available online: https://apps.dtic.mil/sti/pdfs/ADA057655.pdf (accessed on 9 March 2021).
- Parasuraman, R.; Sheridan, T.B.; Wickens, C.D. A model for types and levels of human interaction with automation. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2000, 30, 286–297. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bonner, M.; Taylor, R.; Fletcher, K.; Miller, C.A. Adaptive automation and decision aiding in the military fast jet domain. In Proceedings of the Conference on Human Performance, Situation Awareness and Automation: User-Centered Design for the New Millennium, Savannah, GA, USA, 15–19 October 2000; Available online: http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.123.253&rep=rep1&type=pdf (accessed on 9 March 2021).
- Ferrell, W.R.; Sheridan, T.B. Supervisory control of remote manipulation. IEEE Spectr. 1967, 4, 81–88. [Google Scholar] [CrossRef]
- Jones, D.G.; Endsley, M.R. Sources of situation awareness errors in aviation. Aviat. Space Environ. Med. 1996, 67, 507–512. [Google Scholar]
- Sarter, N.B.; Woods, D.D. How in the World Did We Ever Get into That Mode? Mode Error and Awareness in Supervisory Control. Hum. Factors J. Hum. Factors Ergon. Soc. 1995, 37, 5–19. [Google Scholar] [CrossRef]
- Calhoun, G.L.; Ruff, H.A.; Draper, M.H.; Wright, E.J. Automation-Level Transference Effects in Simulated Multiple Unmanned Aerial Vehicle Control. J. Cogn. Eng. Decis. Mak. 2011, 5, 55–82. [Google Scholar] [CrossRef]
- Ruff, H.A.; Narayanan, S.; Draper, M.H. Human interaction with levels of automation and decision-aid fidelity in the supervisory control of multiple simulated unmanned air vehicles. Presence Teleoperators Virtual Environ. 2002, 11, 335–351. [Google Scholar] [CrossRef]
- Dixon, S.R.; Wickens, C.D.; Chang, D. Mission Control of Multiple Unmanned Aerial Vehicles: A Workload Analysis. Hum. Factors J. Hum. Factors Ergon. Soc. 2005, 47, 479–487. [Google Scholar] [CrossRef] [PubMed]
- Donmez, B.; Cummings, M.L.; Graham, H.D. Auditory Decision Aiding in Supervisory Control of Multiple Unmanned Aerial Vehicles. Hum. Factors J. Hum. Factors Ergon. Soc. 2009, 51, 718–729. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cummings, M.L.; Mitchell, P.J. Automated scheduling decision support for supervisory control of multiple UAVs. J. Aerosp. Comput. Inf. Commun. 2006, 3, 294–308. [Google Scholar] [CrossRef]
- Fortmann, F.; Lüdtke, A. An intelligent SA-adaptive interface to aid supervisory control of a UAV swarm. In Proceedings of the 2013 IEEE International Conference on Industrial Informatics (INDIN), Bochum, Germany, 29–31 July 2013. [Google Scholar] [CrossRef]
- Fern, L.; Rorie, R.C.; Pack, J.; Shively, J.; Draper, M. An Evaluation of Detect and Avoid (DAA) Displays for Unmanned Aircraft Systems: The Effect of Information Level and Display Location on Pilot Performance. In Proceedings of the 15th AIAA Aviation Technology, Integration, and Operations Conference, Dallas, TX, USA, 22–26 June 2015. [Google Scholar] [CrossRef] [Green Version]
- Rorie, R.C.; Fern, L.; Monk, K.; Santiago, C.; Shively, R.J.; Roberts, Z.S. Validation of Minimum Display Requirements for a UAS Detect and Avoid System. In Proceedings of the 17th AIAA Aviation Technology, Integration, and Operations Conference, Denver, CO, USA, 5–9 June 2017. [Google Scholar] [CrossRef]
- Vu, K.-P.L.; Rorie, R.C.; Fern, L.; Shively, R.J. Human Factors Contributions to the Development of Standards for Displays of Unmanned Aircraft Systems in Support of Detect-and-Avoid. Hum. Factors J. Hum. Factors Ergon. Soc. 2020, 62, 505–515. [Google Scholar] [CrossRef] [Green Version]
- Fuchs, C.; Borst, C.; De Croon, G.C.H.E.; Van Paassen, M.M.; Mulder, M. An ecological approach to the supervisory control of UAV swarms. Int. J. Micro Air Veh. 2014, 6, 211–229. [Google Scholar] [CrossRef] [Green Version]
- Perez, D.; Maza, I.; Caballero, F.; Scarlatti, D.; Casado, E.; Ollero, A. A ground control station for a Multi-UAV surveillance system: Design and validation in field experiments. J. Intell. Robot. Syst. Theory Appl. 2013, 69, 119–130. [Google Scholar] [CrossRef]
- Friedrich, M.; Lieb, J. A Novel Human Machine Interface to Support Supervision and Guidance of Multiple Highly Automated Unmanned Aircraft. In Proceedings of the 2019 IEEE/AIAA 38th Digital Avionics Systems Conference (DASC), San Diego, CA, USA, 8–12 September 2019. [Google Scholar] [CrossRef]
- Vicente, K.J.; Rasmussen, J. Ecological Interface Design: Theoretical Foundations. IEEE Trans. Syst. Man Cybern. 1992, 22, 589–606. [Google Scholar] [CrossRef] [Green Version]
- Treisman, A.M.; Gelade, G. A feature-integration theory of attention. Cogn. Psychol. 1980, 12, 97–136. [Google Scholar] [CrossRef]
- Barrado, C.; Boyero, M.; Brucculeri, L.; Ferrara, G.; Hately, A.; Hullah, P.; Martin-Marrero, D.; Pastor, E.; Rushton, A.P.; Volkert, A. U-space concept of operations: A key enabler for opening airspace to emerging low-altitude operations. Aerospace 2020, 7, 24. [Google Scholar] [CrossRef] [Green Version]
- CORUS. SESAR Concept of Operations for U-Space, 2019. Available online: https://www.sesarju.eu/node/3411 (accessed on 9 March 2021).
- Federal Aviation Administration, UTM Concept of Operations Version 2.0 (UTM ConOps v2.0), 2020. Available online: https://www.faa.gov/uas/research_development/traffic_management/media/UTM_ConOps_v2.pdf (accessed on 9 March 2021).
- Young, S.D.; Quach, C.; Goebel, K.; Nowinski, J. In-time safety assurance systems for emerging autonomous flight operations. In Proceedings of the 2018 AIAA/IEEE 37th Digital Avionics Systems Conference (DASC), London, UK, 23–27 September 2018. [Google Scholar] [CrossRef]
- EUROCAE Working Group 105. Focus Area UTM-Report: E-Identification and Geo-Fencing for Open and Specific UAV Categories; Version 1.0; EUROCAE: Saint-Denis, France, 2017. [Google Scholar]
- Geister, D.; Korn, B. Density based management concept for urban air traffic. In Proceedings of the 2018 AIAA/IEEE 37th Digital Avionics Systems Conference (DASC), London, UK, 23–27 September 2018. [Google Scholar] [CrossRef]
- Gilabert, R.V.; Dill, E.T.; Hayhurst, K.J.; Young, S.D. SAFEGUARD: Progress and test results for a reliable independent on-board safety net for UAS. In Proceedings of the 2017 AIAA/IEEE 36th Digital Avionics Systems Conference (DASC), St. Petersburg, FL, USA, 16–21 September 2017. [Google Scholar] [CrossRef] [Green Version]
- Consiglio, M.; Munoz, C.; Hagen, G.; Narkawicz, A.; Balachandran, S. ICAROUS: Integrated configurable algorithms for reliable operations of unmanned systems. In Proceedings of the 2016 IEEE/AIAA 35th Digital Avionics Systems Conference (DASC), Sacramento, CA, USA, 25–30 September 2016. [Google Scholar] [CrossRef] [Green Version]
- Consiglio, M.; Duffy, B.; Balachandran, S.; Glaab, L.; Muñoz, C. Sense and avoid characterization of the independent configurable architecture for reliable operations of unmanned systems. In Proceedings of the 13th USA/Europe Air Traffic Management Research and Development Seminar, Vienna, Austria, 17–21 June 2019; Available online: https://ntrs.nasa.gov/citations/20200002709 (accessed on 9 March 2021).
- Ancel, E.; Capristan, F.M.; Foster, J.V.; Condotta, R.C. Real-time risk assessment framework for unmanned aircraft system (UAS) traffic management (UTM). In Proceedings of the 17th AIAA Aviation Technology, Integration, and Operations Conference, Denver, CO, USA, 5–9 June 2017. [Google Scholar] [CrossRef] [Green Version]
- Ancel, E.; Capristan, F.M.; Foster, J.V.; Condotta, R.C. In-Time Non-Participant Casualty Risk Assessment to Support Onboard Decision Making for Autonomous Unmanned Aircraft. In Proceedings of the AIAA Aviation 2019 Forum, Dallas, TX, USA, 17–21 June 2019. [Google Scholar] [CrossRef]
- Hogge, E.F.; Kulkarni, C.S.; Vazquez, S.L.; Smalling, K.M.; Strom, T.H.; Hill, B.L.; Quach, C.C. Flight tests of a remaining flying time prediction system for small electric aircraft in the presence of faults. In Proceedings of the Annual Conference of the Prognostics and Health Management Society (PHM), St. Petersburg, FL, USA, 2–5 October 2017; Available online: https://www.phmsociety.org/sites/phmsociety.org/files/phm_submission/2017/phmc_17_006.pdf (accessed on 9 March 2021).
- Kulkarni, C.; Hogge, E.; Quach, C.C. Remaining Flying Time Prediction Implementing Battery Prognostics Framework for Electric UAV’s. In Proceedings of the AIAA Propulsion and Energy Forum, Cincinnati, OH, USA, 9–11 July 2018; Available online: https://ntrs.nasa.gov/citations/20180004466 (accessed on 9 March 2021).
- Schumann, J.; Rozier, K.Y.; Reinbacher, T.; Mengshoel, O.J.; Mbaya, T.; Ippolito, C. Towards real-time, on-board, hardware-supported sensor and software health management for unmanned aerial systems. Int. J. Progn. Health Manag. 2015, 6, 1–27. [Google Scholar]
- Scolari, M.; Edward, F.; Serences, J.T. Feature- and Object-Based Attentional Modulation in the Human Visual System. In Oxford Handbook of Attention; Nobre, A.C., Kastner, S., Eds.; Oxford University Press: Oxford, UK, 2014; pp. 573–600. [Google Scholar] [CrossRef]
- Theeuwes, J.; Van der Burg, E. The Role of Spatial and Nonspatial Information in Visual Selection. J. Exp. Psychol. Hum. Percept. Perform. 2007, 33, 1335–1351. [Google Scholar] [CrossRef] [PubMed]
- Wolfe, J.M.; Horowitz, T.S. What attributes guide the deployment of visual attention and how do they do it? Nat. Rev. Neurosci. 2004, 5, 495–501. [Google Scholar] [CrossRef]
- Carter, E.C.; Carter, R.C. Color and conspicuousness. J. Opt. Soc. Am. 1981, 71, 723–729. [Google Scholar] [CrossRef] [PubMed]
- Christ, R.E. Review and Analysis of Color Coding Research for Visual Displays. Hum. Factors J. Hum. Factors Ergon. Soc. 1975, 17, 542–570. [Google Scholar] [CrossRef]
- Wolfe, J.M.; Utochkin, I.S. What is a preattentive feature? Curr. Opin. Psychol. 2019, 29, 19–26. [Google Scholar] [CrossRef] [PubMed]
- Wickens, C.D.; Lee, J.D.; Liu, Y.; Gordon-Becker, S.E. An introduction to Human Factors Engineering; Pearson-Longman Publishing: Harlow, UK, 2004. [Google Scholar]
- Vicente, K.J. Cognitive Work Analysis: Toward Safe, Productive, and Healthy Computer-Based Work; CRC Press: Boca Raton, FL, USA, 1999. [Google Scholar]
- Vicente, K.J. Ecological interface design: Progress and challenges. Hum. Factors J. Hum. Factors Ergon. Soc. 2002, 44, 62–78. [Google Scholar] [CrossRef]
- Howitt, S.L.; Richards, D. The Human Machine Interface for Airborne Control of UAVs. In Proceedings of the 2nd AIAA “Unmanned Unlimited” Conference and Workshop and Exhibit, San Diego, CA, USA, 15–18 September 2003. [Google Scholar] [CrossRef]
- Wogalter, M.S.; Begley, P.B.; Scancorelli, L.F.; Brelsford, J.W. Effectiveness of elevator service signs: Measurement of perceived understandability, willingness to comply and behaviour. Appl. Ergon. 1997, 28, 181–187. [Google Scholar] [CrossRef]
- Hobbs, A.; Lyall, B. Human Factors Guidelines for Unmanned Aircraft Systems. Ergon. Des. 2016, 24, 23–28. [Google Scholar] [CrossRef] [Green Version]
- Tvaryanas, A.P.; Thompson, W.T. Recurrent error pathways in HFACS data: Analysis of 95 mishaps with remotely piloted aircraft. Aviat. Space Environ. Med. 2008, 79, 525–532. [Google Scholar] [CrossRef]
- Martein, R. Norms for name and concept agreement, familiarity, visual complexity and image agreement on a set of 216 pictures. Psychol. Belg. 1995, 35, 205–225. [Google Scholar] [CrossRef]
- McDougall, S.J.P.; Curry, M.B.; De Bruijn, O. Measuring symbol and icon characteristics: Norms for concreteness, complexity, meaningfulness, familiarity, and semantic distance for 239 symbols. Behav. Res. Methods Instrum. Comput. 1999, 31, 487–519. [Google Scholar] [CrossRef] [Green Version]
- Silvennoinen, J.M.; Kujala, T.; Jokinen, J.P.P. Semantic distance as a critical factor in icon design for in-car infotainment systems. Appl. Ergon. 2017, 65, 369–381. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Snodgrass, J.G.; Vanderwart, M. A standardized set of 260 pictures: Norms for name agreement, image agreement, familiarity, and visual complexity. J. Exp. Psychol. Hum. Learn. Mem. 1980, 6, 174–215. [Google Scholar] [CrossRef]
- Tsaparina, D.; Bonin, P.; Méot, A. Russian norms for name agreement, image agreement for the colorized version of the Snodgrass and Vanderwart pictures and age of acquisition, conceptual familiarity, and imageability scores for modal object names. Behav. Res. Methods 2011, 43, 1085–1099. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- McDougall, S.J.P.; De Bruijn, O.; Curry, M.B. Exploring the effects of icon characteristics on user performance: The role of icon concreteness, complexity, and distinctiveness. J. Exp. Psychol. Appl. 2000, 6, 291–306. [Google Scholar] [CrossRef] [PubMed]
- McDougall, S.J.P.; Curry, M.B.; de Bruijn, O. The Effects of Visual Information on Users’ Mental Models: An Evaluation of Pathfinder Analysis as a Measure of Icon Usability. Int. J. Cogn. Ergon. 2001, 5, 59–84. [Google Scholar] [CrossRef] [Green Version]
- Smythwood, M.; Hadzikadic, M. The Effects of Icon Characteristics on Search Time. In Proceedings of the 9th International Conference on Applied Human Factors and Ergonomics, Orlando, FL, USA, 21–25 July 2018. [Google Scholar] [CrossRef]
- European Aviation Safety Agency. Certification Specification and Acceptable Means of Compliance for Large Aeroplanes (CS-25), 2020. Available online: https://www.easa.europa.eu/sites/default/files/dfu/cs-25_amendment_25.pdf (accessed on 9 March 2021).
- Moore, A.J.; Schuber, M.; Rymer, N. Autonomous inspection of electrical transmission structures with airborne UV sensors and automated air traffic management. In Proceedings of the 2018 AIAA Information Systems-AIAA Infotech @ Aerospace, Kissimmee, FL, USA, 8–12 January 2018. [Google Scholar] [CrossRef] [Green Version]
- Ng, A.W.Y.; Chan, A.H.S. Color associations among designers and non-designers for common warning and operation concepts. Appl. Ergon. 2018, 70, 18–25. [Google Scholar] [CrossRef]
- Durham, J.; Kenyon, A. Mock-Ups: Using Experiential Simulation Models in the Healthcare Design Process. HERD Health Environ. Res. Des. J. 2019, 12, 11–20. [Google Scholar] [CrossRef]
- Ricca, F.; Scanniello, G.; Torchiano, M.; Reggio, G.; Astesiano, E. Assessing the Effect of Screen Mockups on the Comprehension of Functional Requirements. ACM Trans. Softw. Eng. Methodol. 2014, 24, 1–38. [Google Scholar] [CrossRef]
- Peavey, E.K.; Zoss, J.; Watkins, N. Simulation and Mock-Up Research Methods to Enhance Design Decision Making. HERD Health Environ. Res. Des. J. 2012, 5, 133–144. [Google Scholar] [CrossRef]
- Rivero, J.M.; Rossi, G.; Grigera, J.; Burella, J.; Luna, E.R.; Gordillo, S. From Mockups to User Interface Models: An Extensible Model Driven Approach. In Proceedings of the 10th International Conference on Web Engineering, Vienna, Austria, 5–9 July 2010. [Google Scholar] [CrossRef]
- Xing, J. Designing Questionnaires for Controlling and Managing Information Complexity in Visual Displays (Tech. Rep. to Federal Aviation Administration No. DOT/FAA/AM-08/18). Civil Aerospace Medical Institute, Office of Aerospace Medicine: Oklahoma City, OK, USA, 2008. Available online: https://apps.dtic.mil/sti/pdfs/ADA488605.pdf (accessed on 9 March 2021).
- SESAR Joint Undertaking. Situation Awareness for SHAPE (SASHA), 2012. Available online: https://ext.eurocontrol.int/ehp/?q=node/1609 (accessed on 9 March 2021).
- Davis, F.D. Perceived Usefulness, Perceived Ease of Use, and User Acceptance of Information Technology. MIS Q. 1989, 13, 319–340. [Google Scholar] [CrossRef] [Green Version]
- Abbott, T.S. A Simulation Evaluation of the Engine Monitoring and Control System Display (Technical Report No. 2960), 1990. Available online: https://ntrs.nasa.gov/citations/19900009077 (accessed on 9 March 2021).
- Novacek, P. Design Displays for Better Pilot Reaction. Avion. News. October 2003, pp. 44–47. Available online: http://aea.net/AvionicsNews/ANArchives/DesignDisplayOct03.pdf (accessed on 9 March 2021).
- Fabra, F.; Calafate, C.T.; Cano, J.C.; Manzoni, P. ArduSim: Accurate and real-time multicopter simulation. Simul. Model. Pract. Theory 2018, 87, 170–190. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System Decomposition Level | Functional Abstraction Level |
|---|---|
| Whole system | Generalized functions |
| Subsystem and components | Physical functions |
| Physical forms |
| Derived Design Principle | Metric |
|---|---|
| Icons shall resemble the real-world object they are intended to represent. | Concreteness |
| Icons shall entail as much detail as necessary, but as little as possible. | Complexity |
| Icons shall include features that are familiar to the operator. | Familiarity |
| Abstract Function | Generalized Function | Icon | Description |
|---|---|---|---|
| Aviation of aircraft | Command conformance |  | sUAS + arrows representing direction of movement. |
| Flight envelope protection |  | sUAS + scales representing the bank angle. | |
| Range & endurance |  | Battery capacity + route from origin to destination. | |
| Separation to hazards & prohibited areas | Geo-fence conformance |  | Fence representing a geo-fence. |
| Obstacles, terrain & traffic |  | Arrow around a triangle + exclamation mark, representing rerouting around a potentially hazardous object. | |
| Meteorological constraints |  | Wind sock representative for weather. | |
| Minimization of risk to the public | Casualty risk |  | Group of people representing the general public that needs to be protected. |
| Vehicle health | Data transfer |  | Icon for signal reception quality, known from mobile phones, representing data link reception. |
| Positional accuracy |  | Cross + square + dotted circle, intended to resemble a target for representing accuracy. | |
| Electrical supply |  | Battery icon, familiar from the automotive domain. | |
| Motor health |  | Rotors + circle, representing a motor of a multi-copter. | |
| Sensor health |  | Sensor + radio waves, representing a sensor. | |
| UTM airspace conformance | UTM information |  | Open envelope, visualizing incoming mail. |
| Airspace conformance |  | Air vehicle + box with a dotted line, representing approved airspace boundaries. |
| State | Specification | Color | Example | |
|---|---|---|---|---|
| Nominal | All parameters are within nominal limits. | Gray |  | Range is sufficient. |
| Expected change | One or more parameters are changing in an expected manner. | Cyan |  | Guided mode engaged due to encounter of rogue traffic. |
| Caution | One or more parameters are approaching critical limits. | Yellow |  | Battery voltage below threshold value. |
| Warning | One or more parameters are within critical limits. | Red (flash) |  | Loss of data link. |
| Questionnaire | M | SD | MD |
| Display complexity | 4.69 | 0.62 | 5.00 |
| Situation awareness | 4.97 | 0.62 | 5.00 |
| Ease of use | 5.12 | 0.60 | 5.17 |
| Questions assessing visual search | M | SD | MD |
| I know where to look for the information I need. | 5.29 | 0.76 | 5.00 |
| I can see the information I need without searching. | 4.57 | 0.98 | 5.00 |
| I have to search through the display to find the information I need. (inverted) | 3.43 | 1.72 | 4.00 |
| I can find the information I need with one or a few glances. | 5.14 | 0.90 | 5.00 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Friedrich, M.; Vollrath, M. Human–Machine Interface Design for Monitoring Safety Risks Associated with Operating Small Unmanned Aircraft Systems in Urban Areas. Aerospace 2021, 8, 71. https://doi.org/10.3390/aerospace8030071
Friedrich M, Vollrath M. Human–Machine Interface Design for Monitoring Safety Risks Associated with Operating Small Unmanned Aircraft Systems in Urban Areas. Aerospace. 2021; 8(3):71. https://doi.org/10.3390/aerospace8030071
Chicago/Turabian StyleFriedrich, Max, and Mark Vollrath. 2021. "Human–Machine Interface Design for Monitoring Safety Risks Associated with Operating Small Unmanned Aircraft Systems in Urban Areas" Aerospace 8, no. 3: 71. https://doi.org/10.3390/aerospace8030071