
Prediction and Validation of Landing Stability of a Lunar Lander by a Classification Map Based on Touchdown Landing Dynamics’ Simulation Considering Soft Ground


Abstract
:1. Introduction
2. Touchdown Landing Dynamics’ Simulation
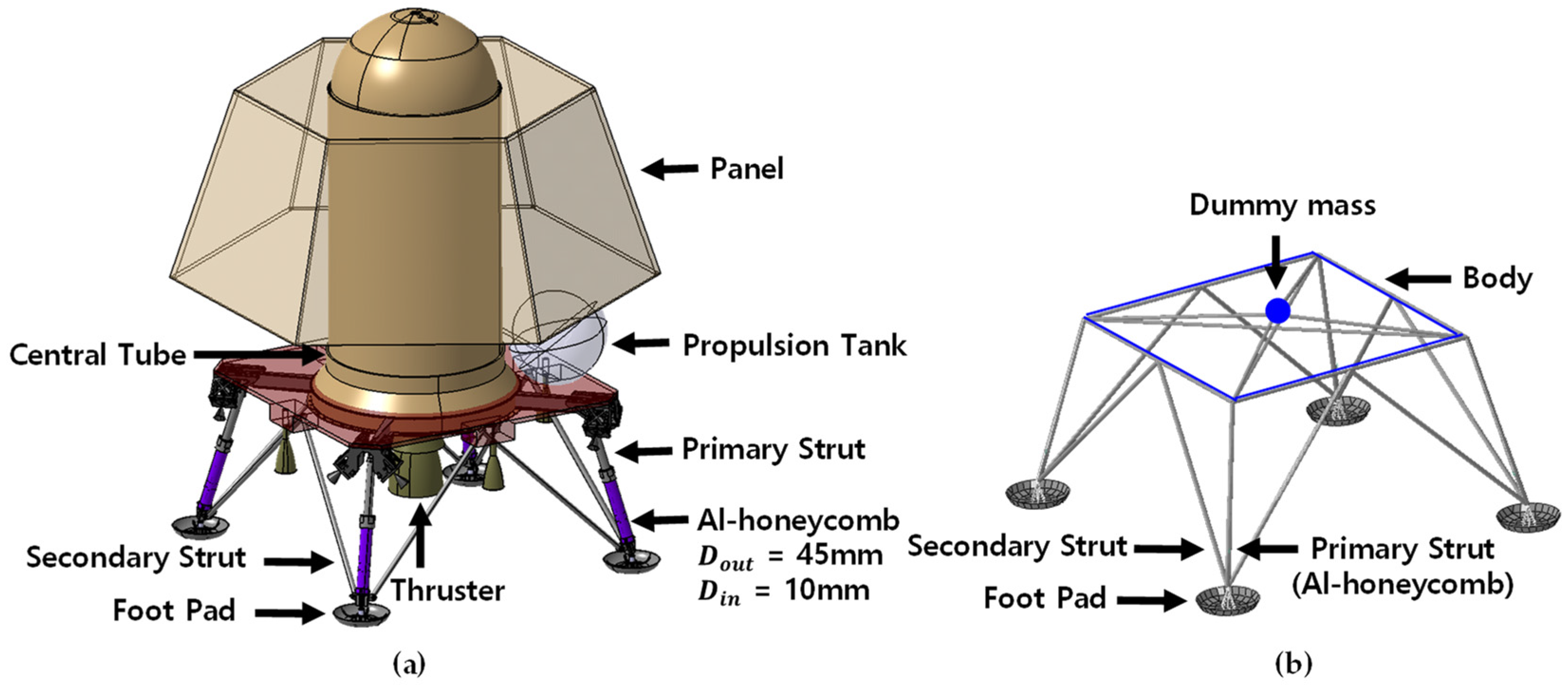
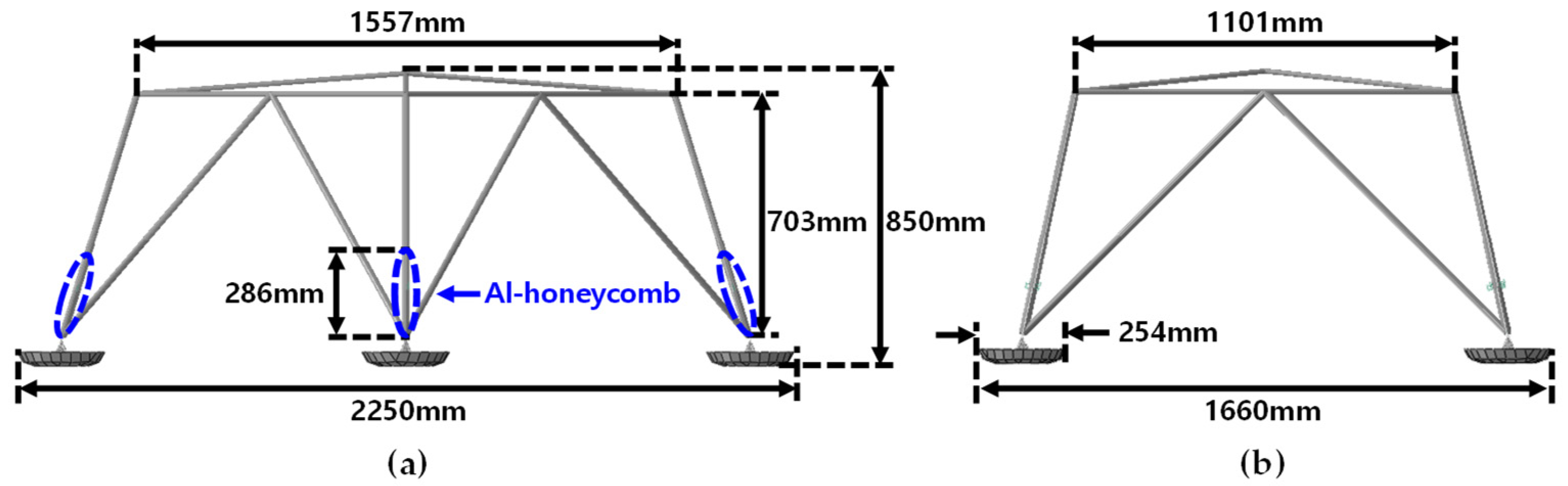
2.1. Finite-Element Model of the Lunar Lander
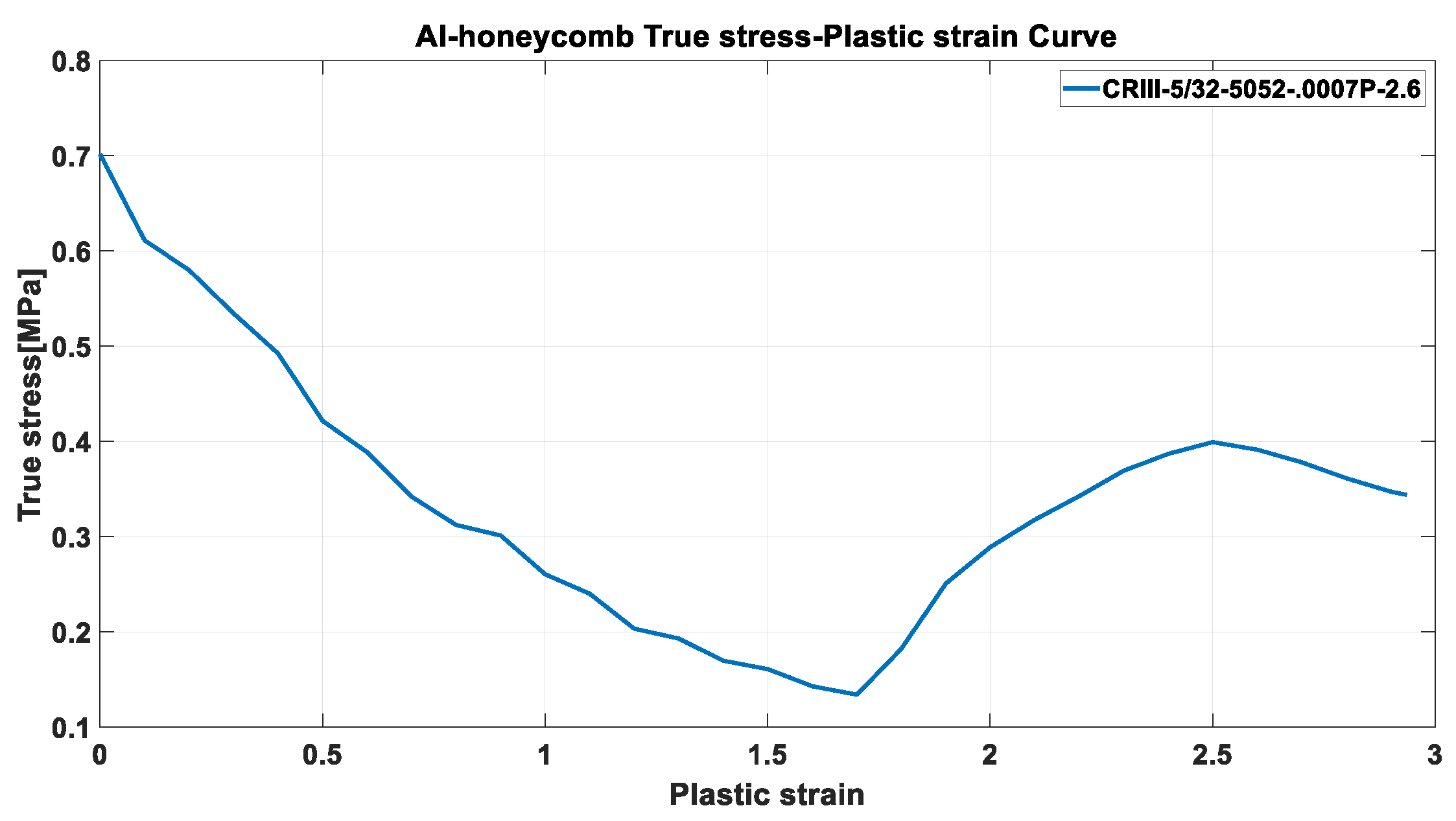
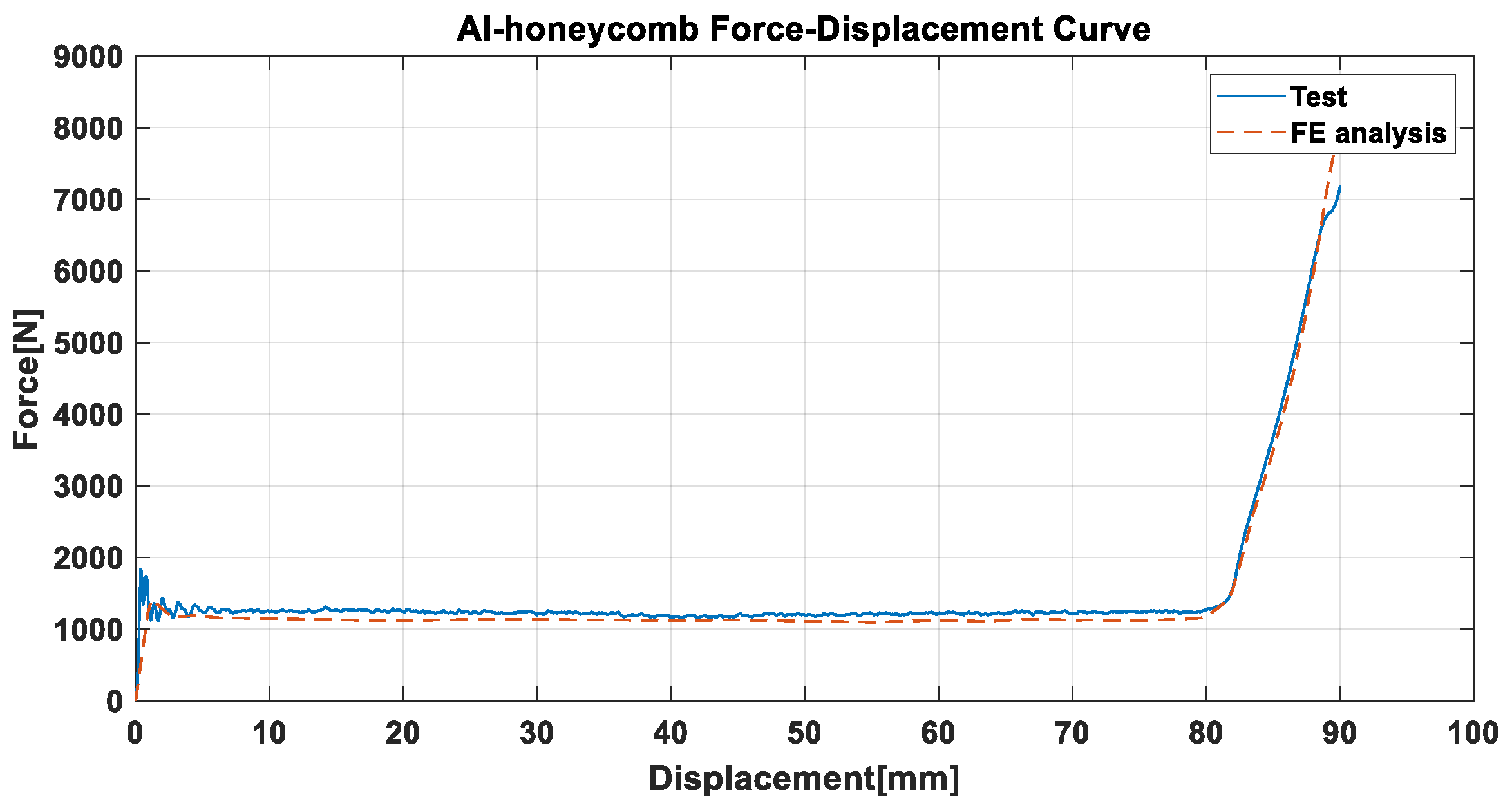
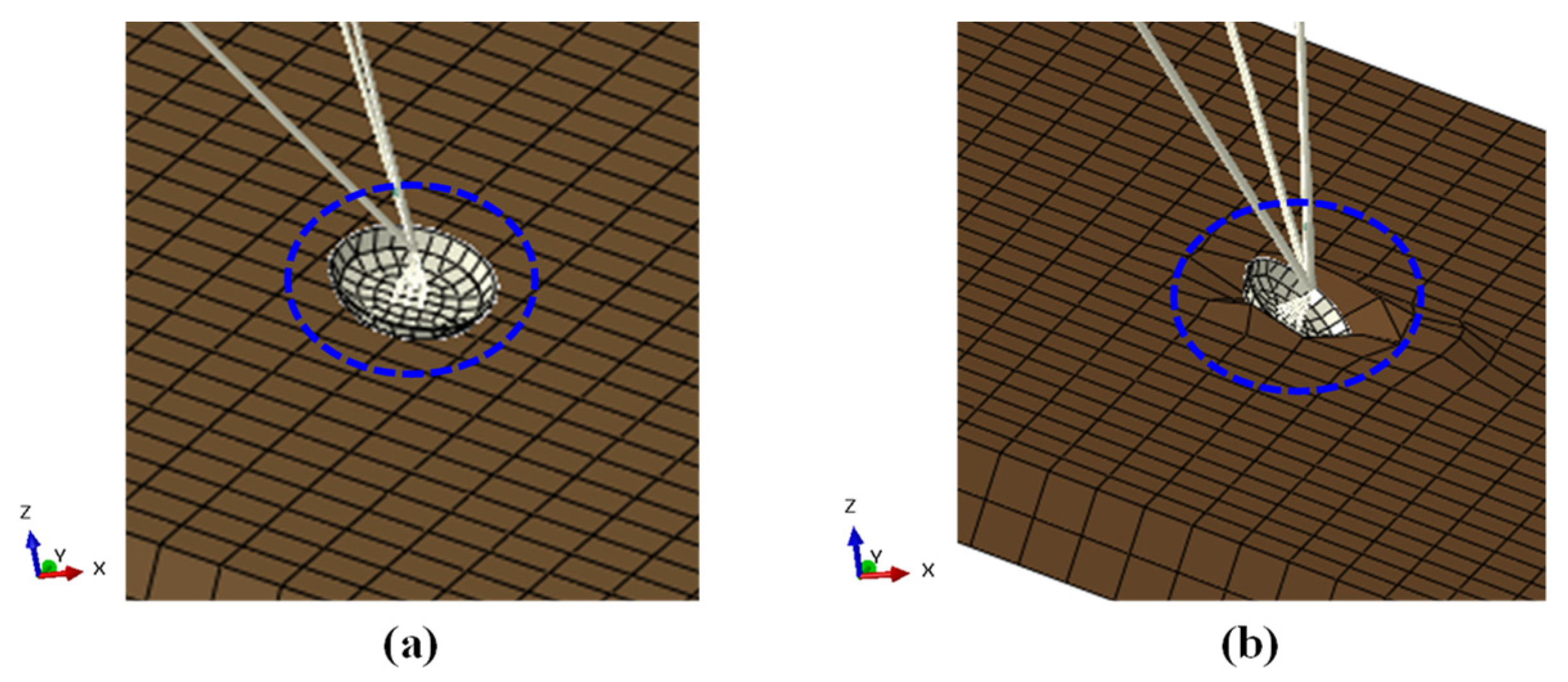
2.2. FE Model of the Soil Models
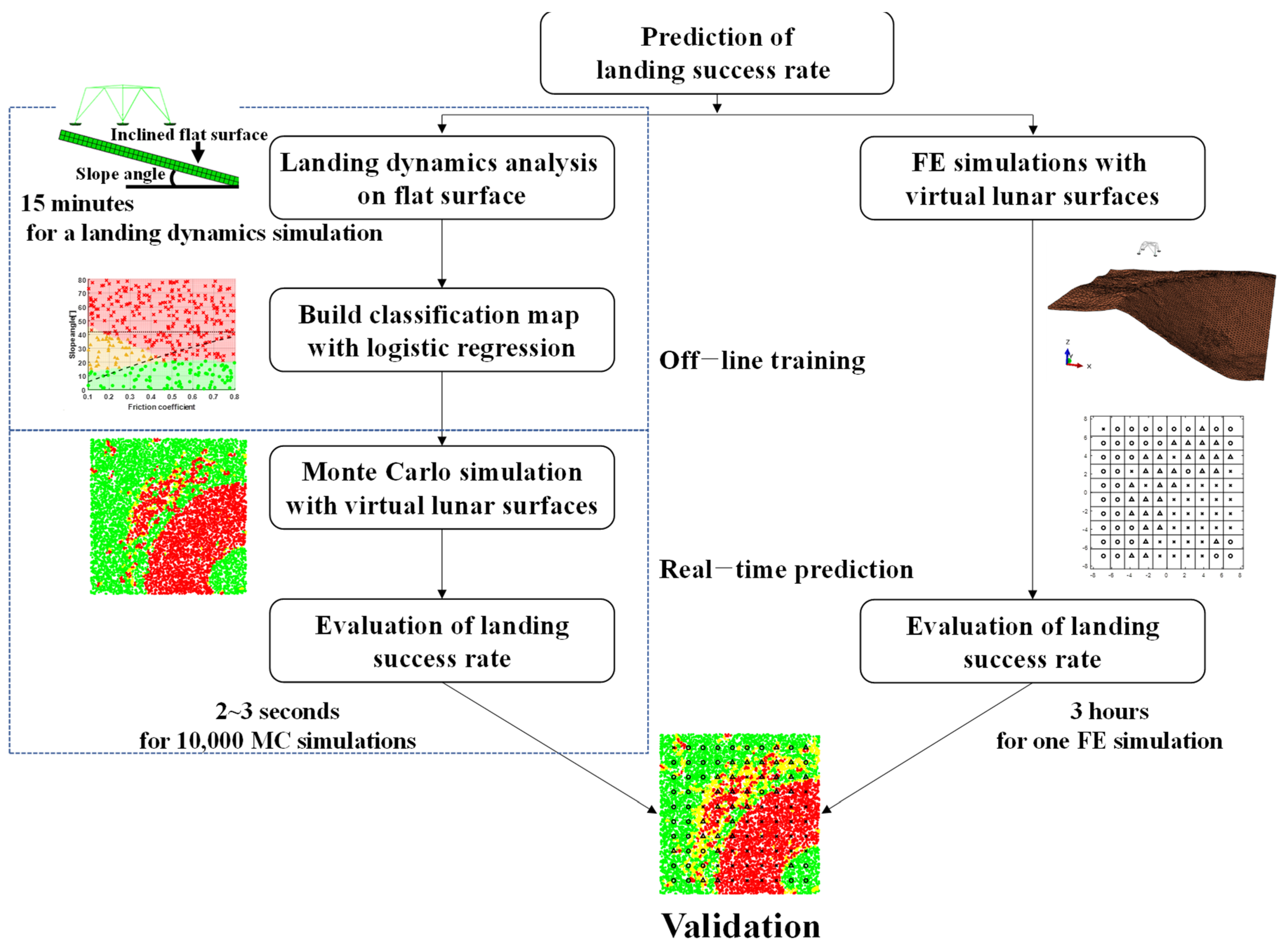
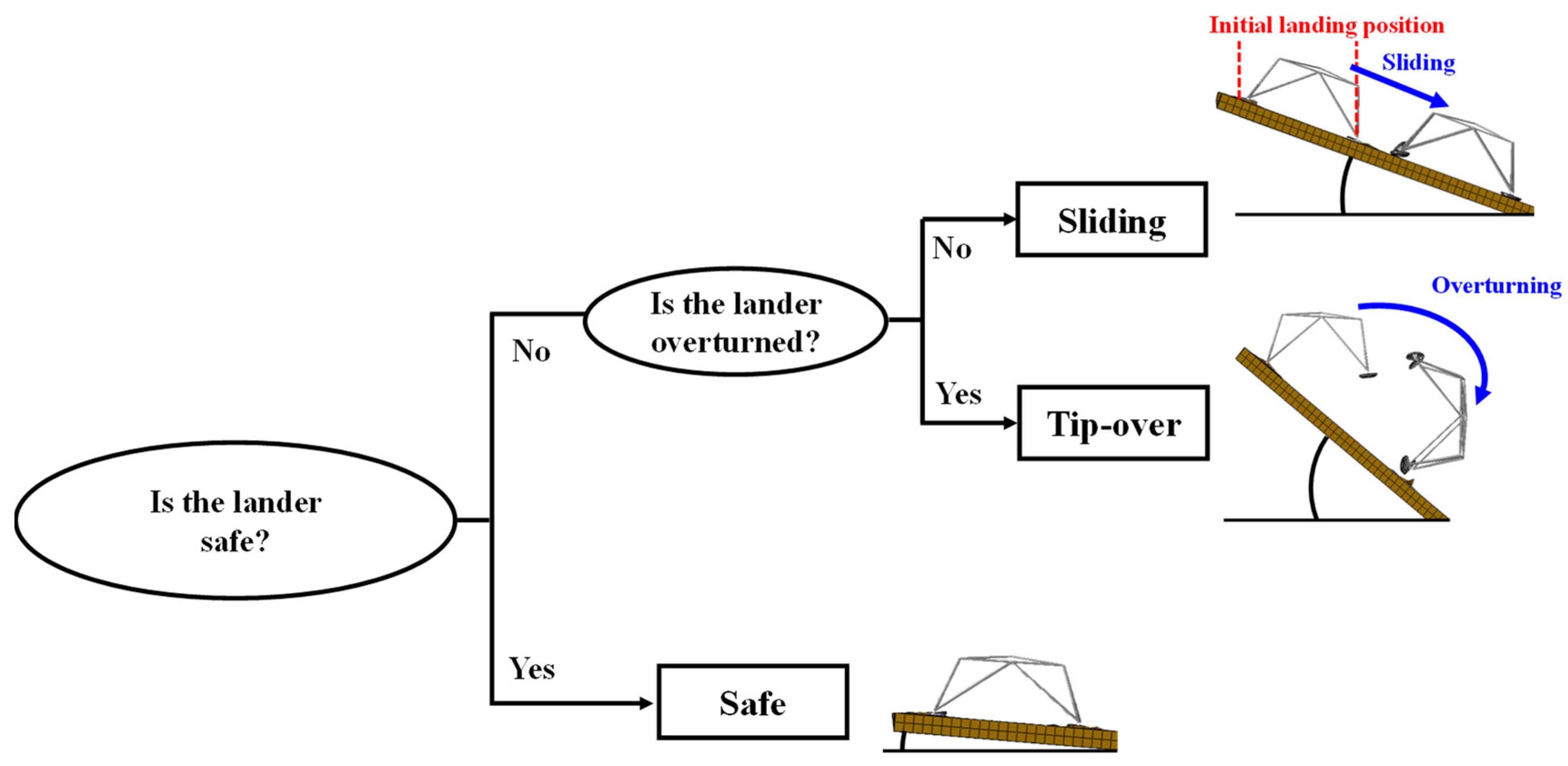
3. Prediction of Landing Stability
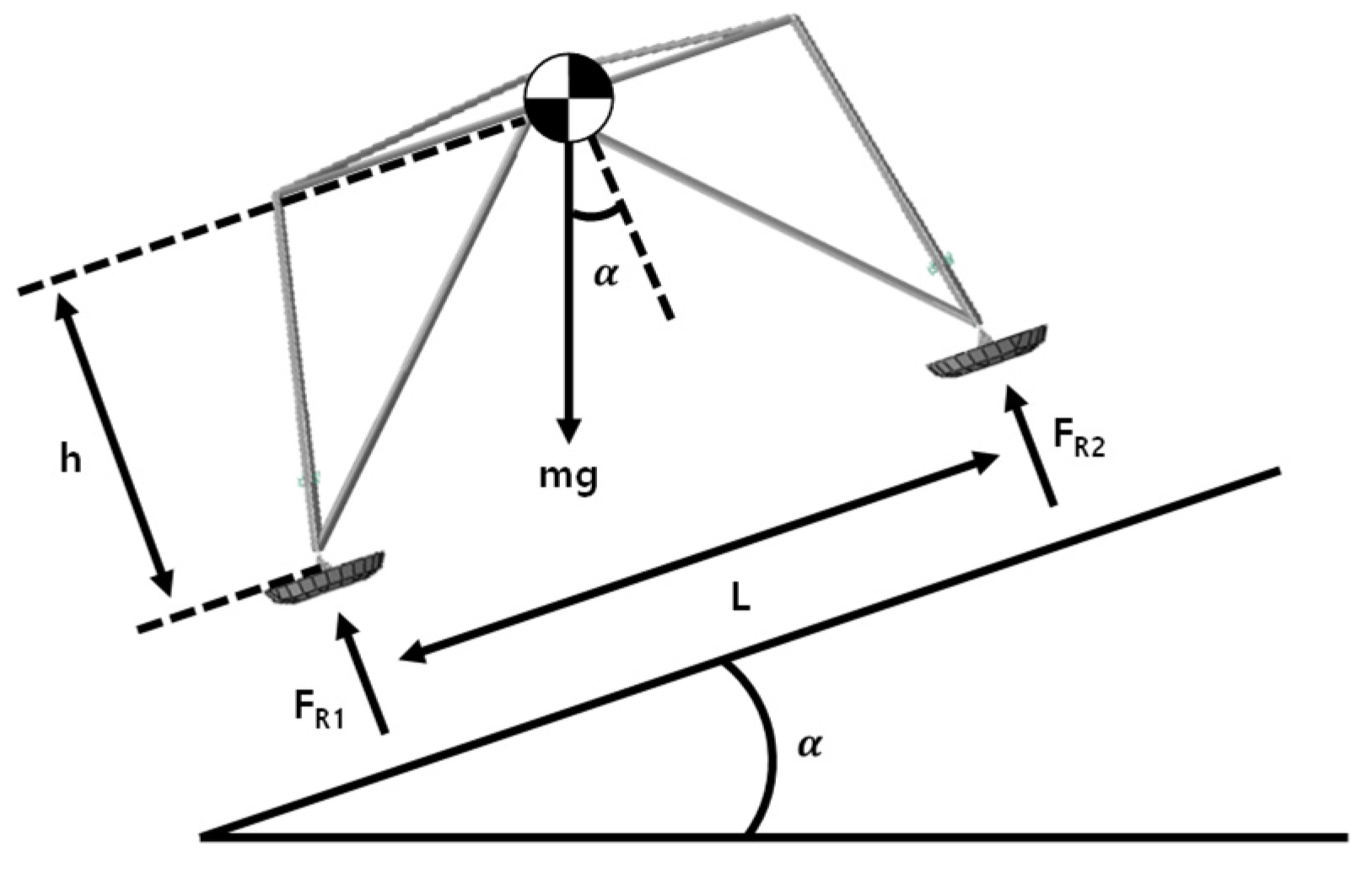
3.1. Static Stability Condition
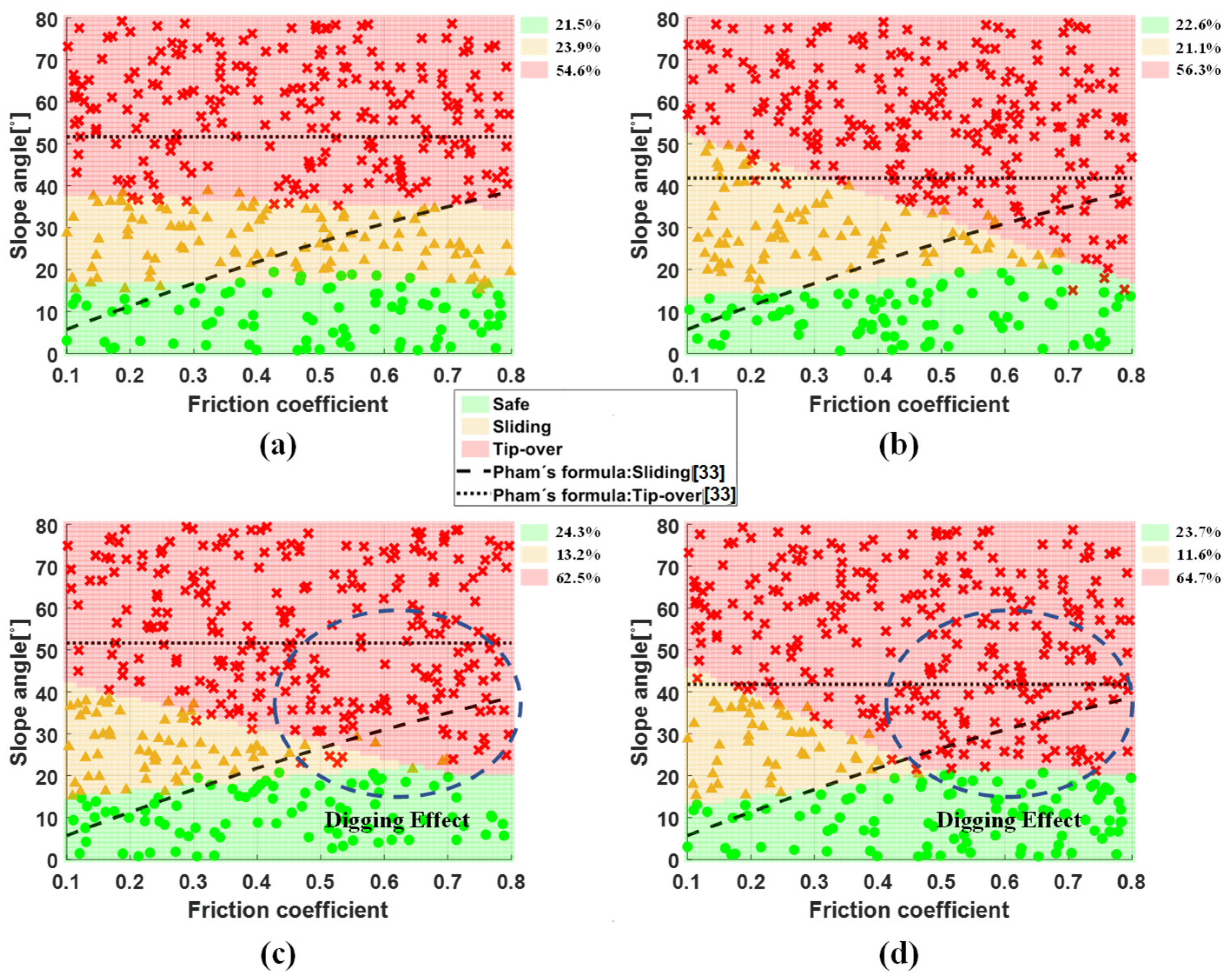
3.2. Building a Landing Stability Classification Map by Logistic Regression
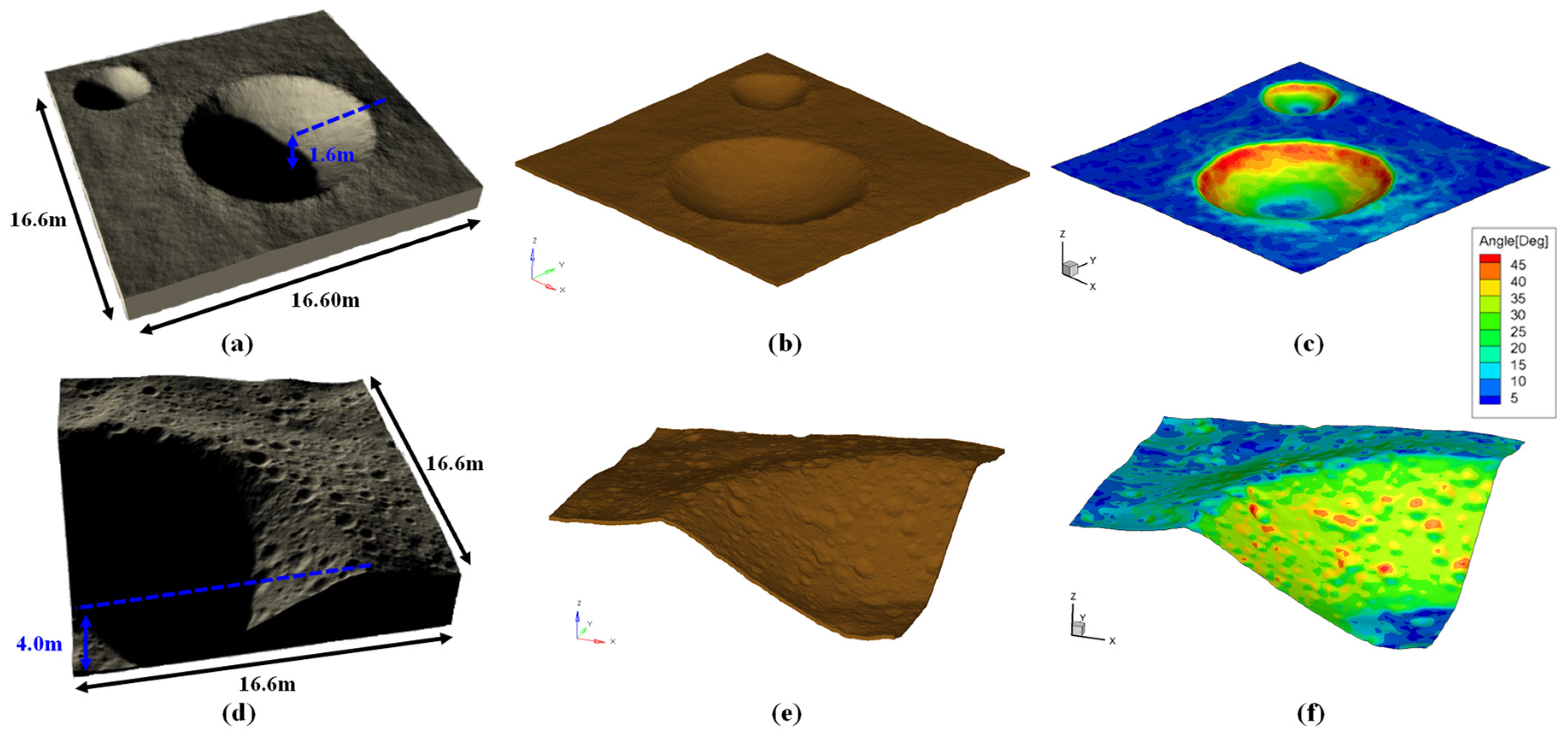
3.3. Preparation of Synthetic Lunar Surface Models
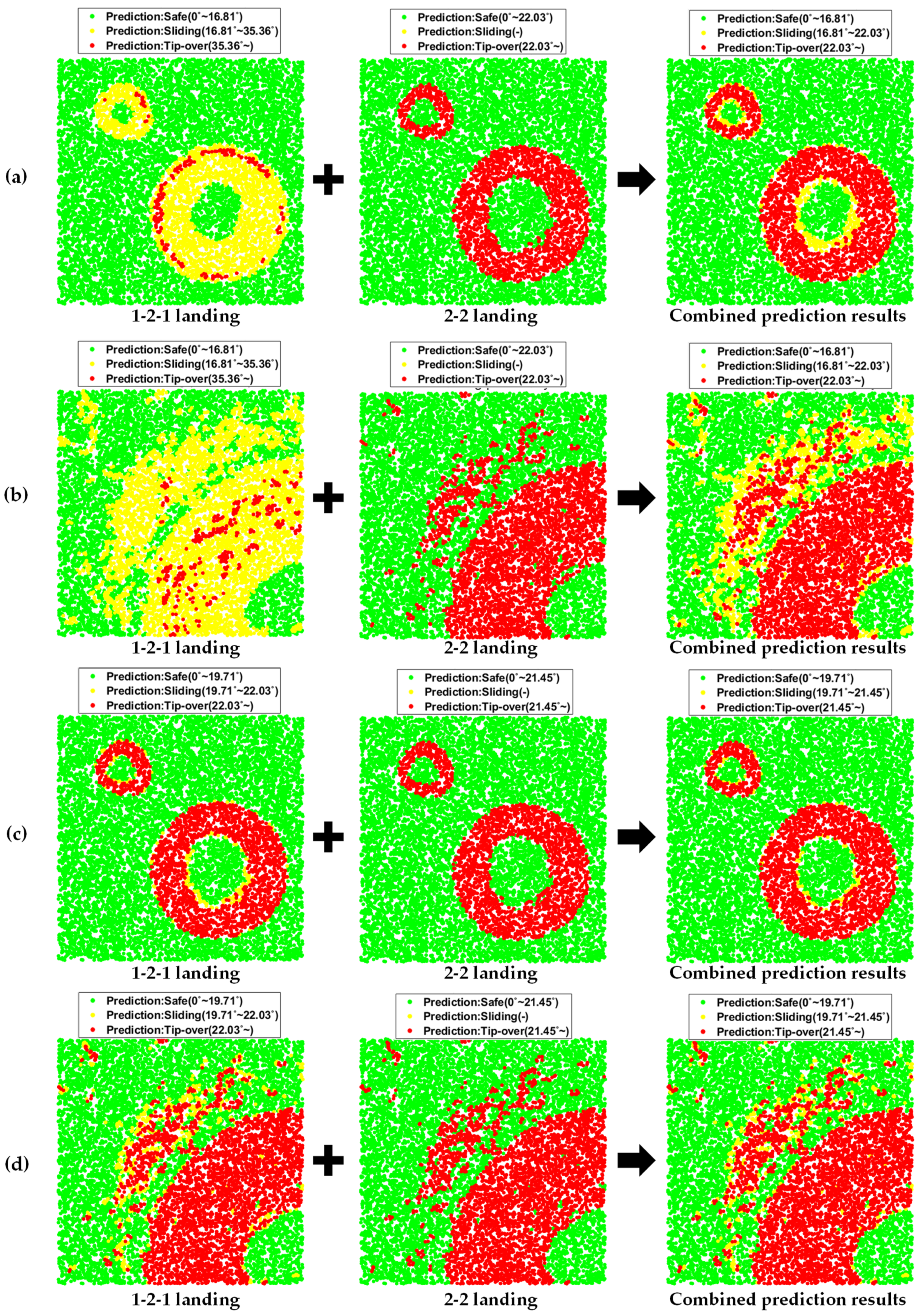
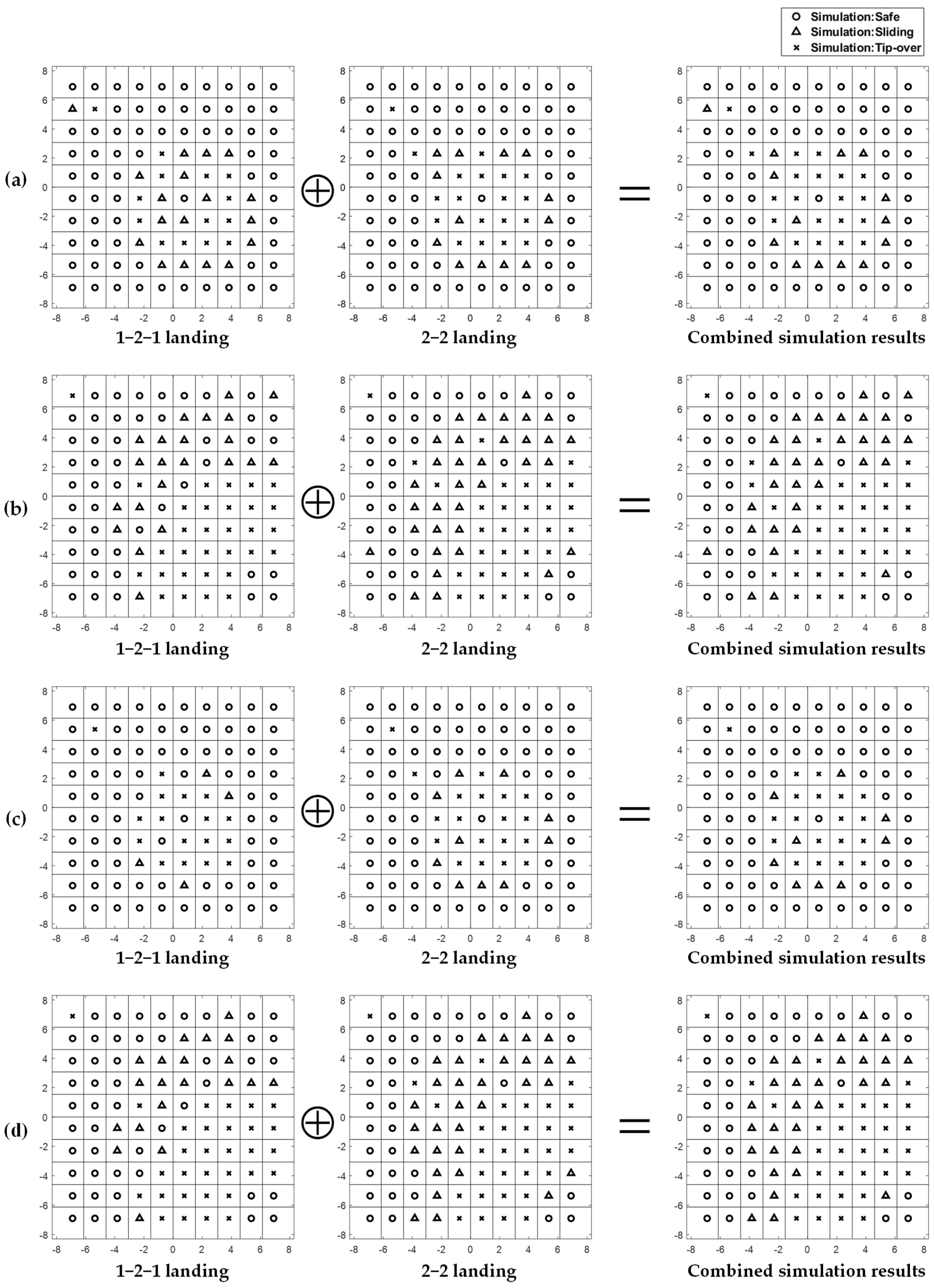
3.4. Prediction and Validation of Landing Stability with Classification Map for Virtual Lunar Surfaces
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Voosen, P. NASA to pay private space companies for moon rides. Science 2018, 362, 875–876. [Google Scholar] [CrossRef]
- Jia, Y.; Zou, Y.; Ping, J.; Xue, C.; Yan, J.; Ning, Y. The scientific objectives and payloads of Chang’E−4 mission. Planet. Space Sci. 2018, 162, 207–215. [Google Scholar] [CrossRef]
- Li, C.; Liu, J.; Ren, X.; Zuo, W.; Tan, X.; Wen, W.; Li, H.; Mu, L.; Su, Y.; Zhang, H. The Chang’e 3 mission overview. Space Sci. Rev. 2015, 190, 85–101. [Google Scholar] [CrossRef]
- Li, F.; Ye, M.; Yan, J.; Hao, W.; Barriot, J.-P. A simulation of the Four-way lunar Lander–Orbiter tracking mode for the Chang’E-5 mission. Adv. Space Res. 2016, 57, 2376–2384. [Google Scholar] [CrossRef]
- Bhandari, N. Chandrayaan-1: Science goals. J. Earth Syst. Sci. 2005, 114, 701–709. [Google Scholar] [CrossRef] [Green Version]
- Sundararajan, V. Overview and technical architecture of India’s Chandrayaan-2 mission to the Moon. In Proceedings of the 2018 AIAA Aerospace Sciences Meeting, Kissimmee, FL, USA, 7–12 January 2018; p. 2178. [Google Scholar]
- Epp, C.D.; Smith, T.B. Autonomous precision landing and hazard detection and avoidance technology (ALHAT). In Proceedings of the 2007 IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2007; pp. 1–7. [Google Scholar]
- Research on Conceptual Design of Lunar Spacecraft and Core Technologies for Lunar Exploration; KARI: Daejeon, Korea, 2011.
- Johnson, A.E.; Klumpp, A.R.; Collier, J.B.; Wolf, A.A. Lidar-based hazard avoidance for safe landing on Mars. J. Guid. Control Dyn. 2002, 25, 1091–1099. [Google Scholar] [CrossRef] [Green Version]
- Jung, Y.; Lee, S.; Bang, H. Digital Terrain Map Based Safe Landing Site Selection for Planetary Landing. IEEE Trans. Aerosp. Electron. Syst. 2019, 56, 368–380. [Google Scholar] [CrossRef]
- Lee, H.; Choi, H.-L.; Jung, D.; Choi, S. Deep neural network-based landmark selection method for optical navigation on lunar highlands. IEEE Access 2020, 8, 99010–99023. [Google Scholar] [CrossRef]
- Mango, D.; Opromolla, R.; Schmitt, C. Hazard detection and landing site selection for planetary exploration using LIDAR. In Proceedings of the 2020 IEEE 7th International Workshop on Metrology for AeroSpace (MetroAeroSpace), Pisa, Italy, 22–24 June 2020; pp. 392–397. [Google Scholar]
- Strahan, A.; Johnson, A. Terrain hazard detection and avoidance during the descent and landing phase of the altair mission. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Toronto, ON, Canada, 2–5 August 2010; p. 7722. [Google Scholar]
- Diamoutene, A.; Noureddine, F.; Kamsu-Foguem, B.; Barro, D. Reliability Analysis with Proportional Hazard Model in Aeronautics. Int. J. Aeronaut. Space Sci. 2021, 22, 1222–1234. [Google Scholar] [CrossRef]
- Cui, P.; Ge, D.; Gao, A. Optimal landing site selection based on safety index during planetary descent. Acta Astronaut. 2017, 132, 326–336. [Google Scholar] [CrossRef] [Green Version]
- Ploen, S.R.; Seraji, H.; Kinney, C.E.; Systems, E. Determination of spacecraft landing footprint for safe planetary landing. IEEE Trans. Aerosp. 2009, 45, 3–16. [Google Scholar] [CrossRef]
- Serrano, N.; Seraji, H. Landing site selection using fuzzy rule-based reasoning. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 4899–4904. [Google Scholar]
- Liu, X.; Li, S.; Jiang, X.; Huang, X. Planetary landing site detection and selection using multilevel optimization strategy. Acta Astronaut. 2019, 163, 272–286. [Google Scholar] [CrossRef]
- D’Ambrosio, A.; Carbone, A.; Spiller, D.; Curti, F. PSO-Based Soft Lunar Landing with Hazard Avoidance: Analysis and Experimentation. Aerospace 2021, 8, 195. [Google Scholar] [CrossRef]
- Hu, Y.; Xiao, J.; Liu, L.; Zhang, L.; Wang, Y. Detection of Small Impact Craters via Semantic Segmenting Lunar Point Clouds Using Deep Learning Network. Remote Sens. 2021, 13, 1826. [Google Scholar] [CrossRef]
- Zang, S.; Mu, L.; Xian, L.; Zhang, W. Semi-Supervised Deep Learning for Lunar Crater Detection Using CE-2 DOM. Remote Sens. 2021, 13, 2819. [Google Scholar] [CrossRef]
- Li, Y.; Si, H.; Zong, Y.; Wu, X.; Zhang, P.; Jia, H.; Xu, S.; Tang, D. Application of Neural Network Based on Real-Time Recursive Learning and Kalman Filter in Flight Data Identification. Int. J. Aeronaut. Space Sci. 2021, 22, 1383–1396. [Google Scholar] [CrossRef]
- Brémaud, P. Markov Chains: Gibbs Fields, Monte Carlo Simulation, and Queues; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013; Volume 31. [Google Scholar]
- Jeong, H.-J.; Lim, J.H.; Kim, J.-W. Development of a Coarse Lunar Soil Model Using Discrete Element Method. J. Korean Soc. Aeronaut. Space Sci. 2019, 47, 26–34. [Google Scholar]
- Oh, M.-H.; Cho, Y.-M.; Lee, H.-J.; Cho, J.-Y.; Hwang, D.-S. Sequential Approximate Optimization of Shock Absorption System for Lunar Lander by using Quadratic Polynomial Regression Meta-model. J. Korean Soc. Aeronaut. Space Sci. 2011, 39, 314–320. [Google Scholar]
- Rogers, W.F. Apollo Experience Report: Lunar Module Landing Gear Subsystem; NASA: Washington, DC, USA, 1972.
- HexWeb, T. Honeycomb Attributes and Properties; Hexcel Composites: Stamford, CT, USA, 1999. [Google Scholar]
- Jeong, H.-J.; Lim, J.H.; Kim, J.-W. Evaluation of Landing Stability of Lunar Lander Considering Various Landing Conditions. J. Korean Soc. Aeronaut. Space Sci. 2018, 46, 124–132. [Google Scholar]
- Yang, S.S.; Kang, Y.C.; Son, J.Y.; Oh, M.H.; Kim, J.H.; Cho, J.Y. Optimization of shock absorption system for lunar lander considering the effect of lunar regolith. J. Korean Soc. Aeronaut. Space Sci. 2014, 42, 284–290. [Google Scholar]
- Witthoeft, A.; Kim, H. Numerical investigation of earth pressure reduction on buried pipes using EPS geofoam compressible inclusions. Geosynth. Int. 2016, 23, 287–300. [Google Scholar] [CrossRef]
- Ramon, R.G.; Boden, R.C.; Mori, O.; Kawaguchi, J.i. Model for Touchdown Dynamics of a Lander on the Solar Power Sail Mission. Master’s Thesis, Luleå University of Technology, Kingston, Jamaica, 2016. [Google Scholar]
- Wang, C.; Nie, H.; Chen, J.; Lee, H.P. The design and dynamic analysis of a lunar lander with semi-active control. Acta Astronaut. 2019, 157, 145–156. [Google Scholar] [CrossRef]
- Pham, V.L.; Zhao, J.; Goo, N.S.; Lim, J.H.; Hwang, D.-S.; Park, J.S. Landing stability simulation of a 1/6 lunar module with aluminum honeycomb dampers. Int. J. Aeronaut. Space Sci. 2013, 14, 356–368. [Google Scholar] [CrossRef] [Green Version]
- Cox, D.R. The regression analysis of binary sequences. J. R. Stat. Soc. Ser. B 1958, 20, 215–232. [Google Scholar] [CrossRef]
- Moler, C.; Little, J.; Bangert, S. MATLAB Users’ Guide; University of New Mexico: Albuquerque, NM, USA, 1982. [Google Scholar]
- Fisher, Y.; McGuire, M.; Voss, R.F.; Barnsley, M.F.; Devaney, R.L.; Mandelbrot, B.B. The Science of Fractal Images; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Moon, S.; Alexandrov, O.; Wong, U.; Choi, H.-L. Enhancing the Resolution of Digital Elevation Models Using Surface Normal from Planetary Images. Int. J. Aeronaut. Space Sci. 2021, 5, 1243–1250. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| FE Model | Mass [kg] | Element Type | Number of Element |
|---|---|---|---|
| Body | 35.02 | Beam (B31) | 16 |
| Strut (Primary + Secondary) | 2.96 × 4 | Truss (T3D2) | 12 |
| Dummy mass | 195.08 | Lumped mass (Mass) | 1 |
| Footpad | 0.52 × 4 | Shell (S3, S4R) | 328 |
| Total | 244.02 |
| Parameter | Value | Remark |
|---|---|---|
| Internal friction angle, ϕd | 33.6° | Results of direct shear test |
| Cohesion stress [kPa] | 2.45 | Results of direct shear test |
| Relative density, Dr | 40.67% | |
| Void ratio, e | 0.751 | emax = 0.843, emin = 0.617 |
| Shear modulus number, B | 150 | For initial loading |
| Specific gravity, Gs | 2.64 | |
| Dry unit weight [kN/m3], γd | 14.79 | |
| Particle density [kg/m3], ρ | 1507.64 | |
| Depth of soil [m], H | 0.001~0.04 | |
| Poisson’s ratio, v | 0.39 | |
| Initial Young’s modulus [MPa], Ei | 0.74~4.64 | 1 MPa |
| Ground Condition | Landing Status | Prediction | |
|---|---|---|---|
| Zone 1 | Zone 2 | ||
| Rigid ground | Safe | 76.0 | 47.3 |
| Sliding | 4.0 | 16.5 | |
| Tip-over | 20.0 | 36.2 | |
| Soft ground | Safe | 77.9 | 57.2 |
| Sliding | 1.4 | 4.9 | |
| Tip-over | 20.7 | 37.9 | |
| Computational cost | 2 s | 2 s | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, Y.-B.; Jeong, H.-J.; Park, S.-M.; Lim, J.H.; Lee, H.-H. Prediction and Validation of Landing Stability of a Lunar Lander by a Classification Map Based on Touchdown Landing Dynamics’ Simulation Considering Soft Ground. Aerospace 2021, 8, 380. https://doi.org/10.3390/aerospace8120380
Kim Y-B, Jeong H-J, Park S-M, Lim JH, Lee H-H. Prediction and Validation of Landing Stability of a Lunar Lander by a Classification Map Based on Touchdown Landing Dynamics’ Simulation Considering Soft Ground. Aerospace. 2021; 8(12):380. https://doi.org/10.3390/aerospace8120380
Chicago/Turabian StyleKim, Yeong-Bae, Hyun-Jae Jeong, Shin-Mu Park, Jae Hyuk Lim, and Hoon-Hee Lee. 2021. "Prediction and Validation of Landing Stability of a Lunar Lander by a Classification Map Based on Touchdown Landing Dynamics’ Simulation Considering Soft Ground" Aerospace 8, no. 12: 380. https://doi.org/10.3390/aerospace8120380