5.1. Simulation Test Case
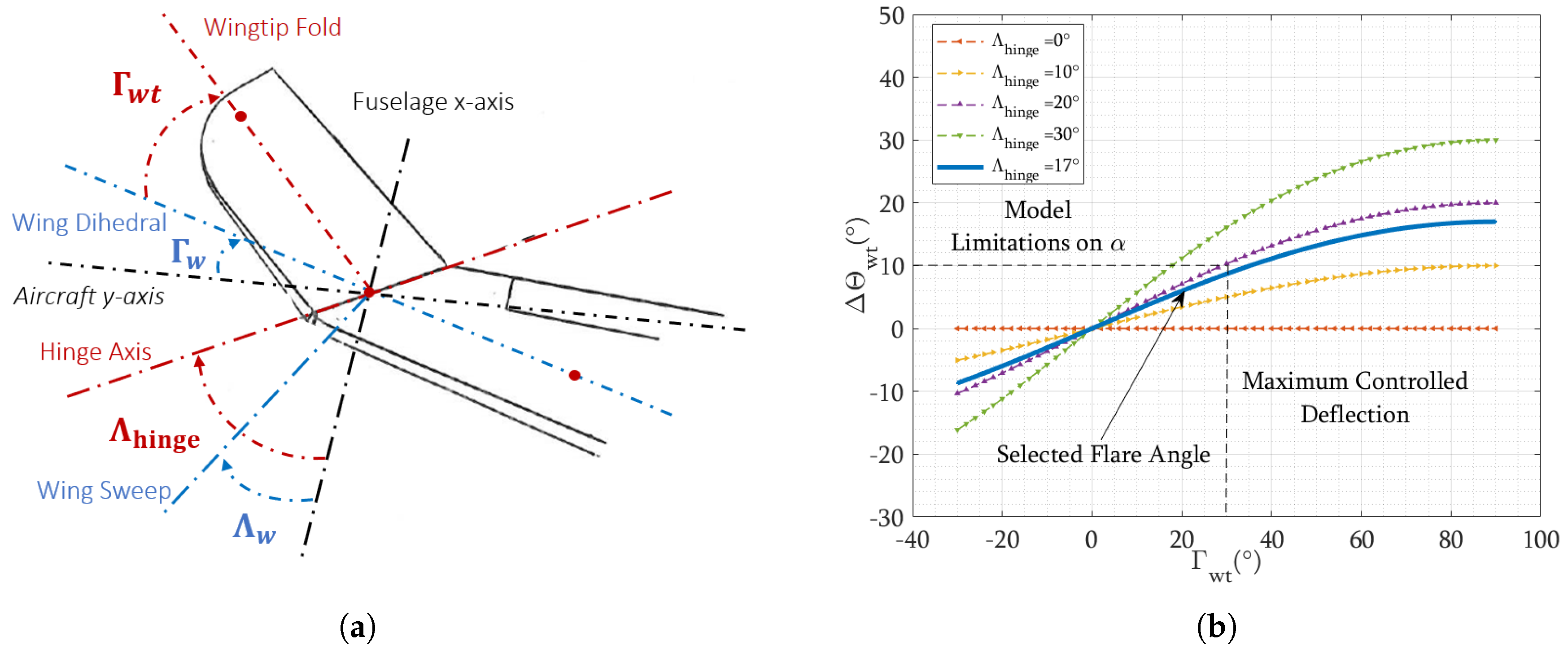
For this case study, a single mass case was considered at approximately 85% of Maximum Take-Off Weight (MTOW) with a Center of Gravity (CoG) at 25% of the mean aerodynamic chord. The wingtip placement corresponded to 10% and 20% of wing semispan from the tip. For the AX-1 aircraft wing span, this corresponds to m and m, respectively. A single hinge flare angle was used herein. The aircraft was then flown in a finite set of symmetric folding configurations. Values ranging from (downward anhedral) to (upward dihedral) were used. Note that greater amplitudes would have led to critical local angles of attack beyond realistic stall conditions and limits of the model and were excluded from this investigation. The airframe was also simulated both as a rigid and flexible structure. As the first does not allow for the airframe to change shape under folded or maneuver loads, the comparison highlighted the flexibility effects. A released wingtip configuration was also considered and was limited to flexible structure due to modeling limitations discussed in previous chapters.
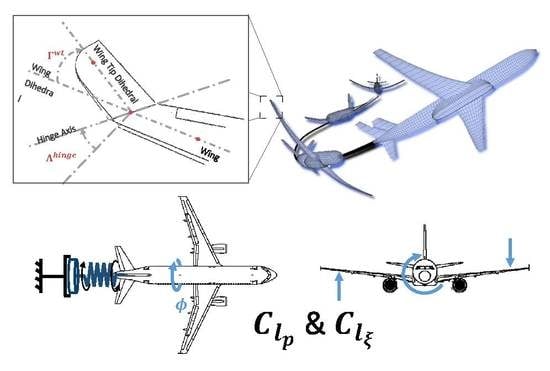
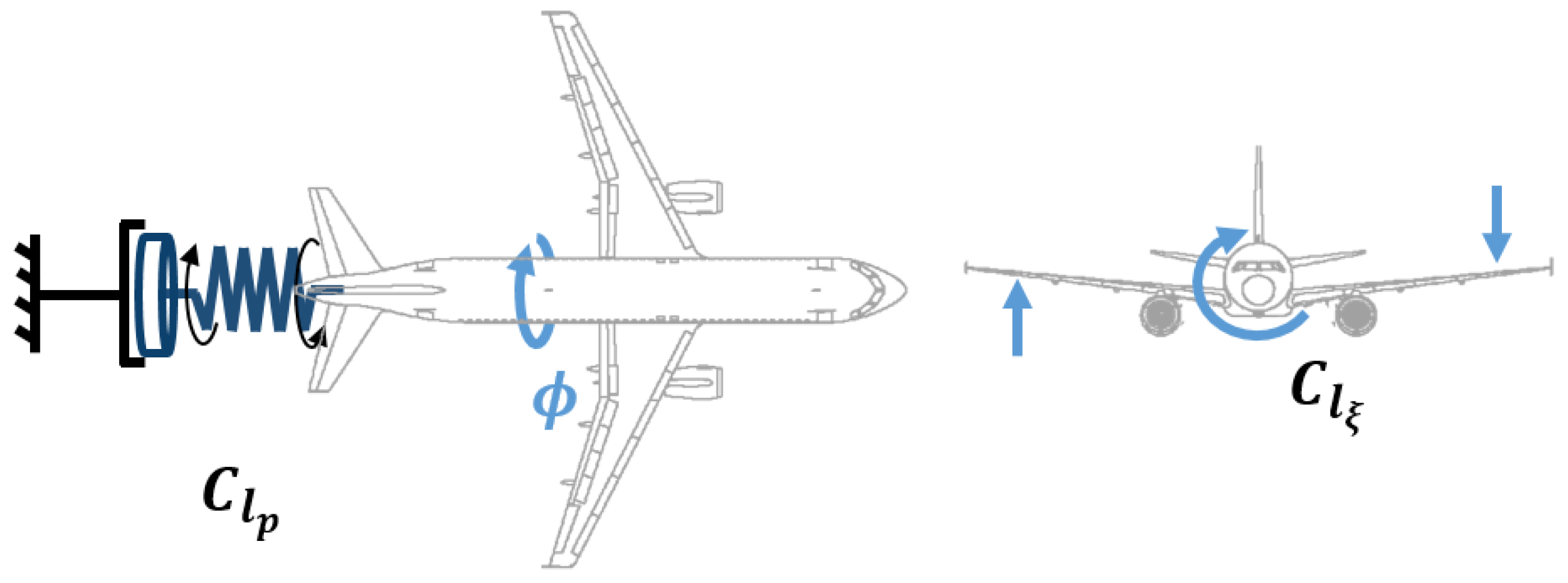
Keeping in mind the mass–spring–damper simplified model, the maneuver can be described as follows [
27]. First, as the aileron is deflected asymmetrically, rolling moment is introduced by the overall differential lift from each wing directly highlighting aileron effectiveness
. As the aircraft experiences a controlled rolling moment, additional disturbing moment appears with angular acceleration
p. During the roll, the wing undergoes a vertical velocity component (the intensity of which is a function of spanwise coordinate). This in turn, leads to a small increase in local flow incidence on the down-going starboard wing and vice versa on the up going wing. The differential lift gives the restoring rolling moment. The aircraft experiences both the disturbing and restoring rolling moment until a steady roll rate is established. This restoring rolling moment is quantified by the roll damping coefficient,
. Lastly, the aircraft roll angle introduces a small but perceivable sideslip angle as the aircraft is not constrained in lateral velocity. This sideslip angle coupled with wing dihedral also leads to differential lift generation, impacting aircraft roll through
.
Introducing structural flexibility means that the structure adapts to the external aerodynamic loading and undergoes deformation during perturbation (including aileron input). Different aerodynamic shape therefore lead to changes in differential lift that generates the restoring rolling moment, thus affecting the roll damping
as well as aileron effectiveness
.
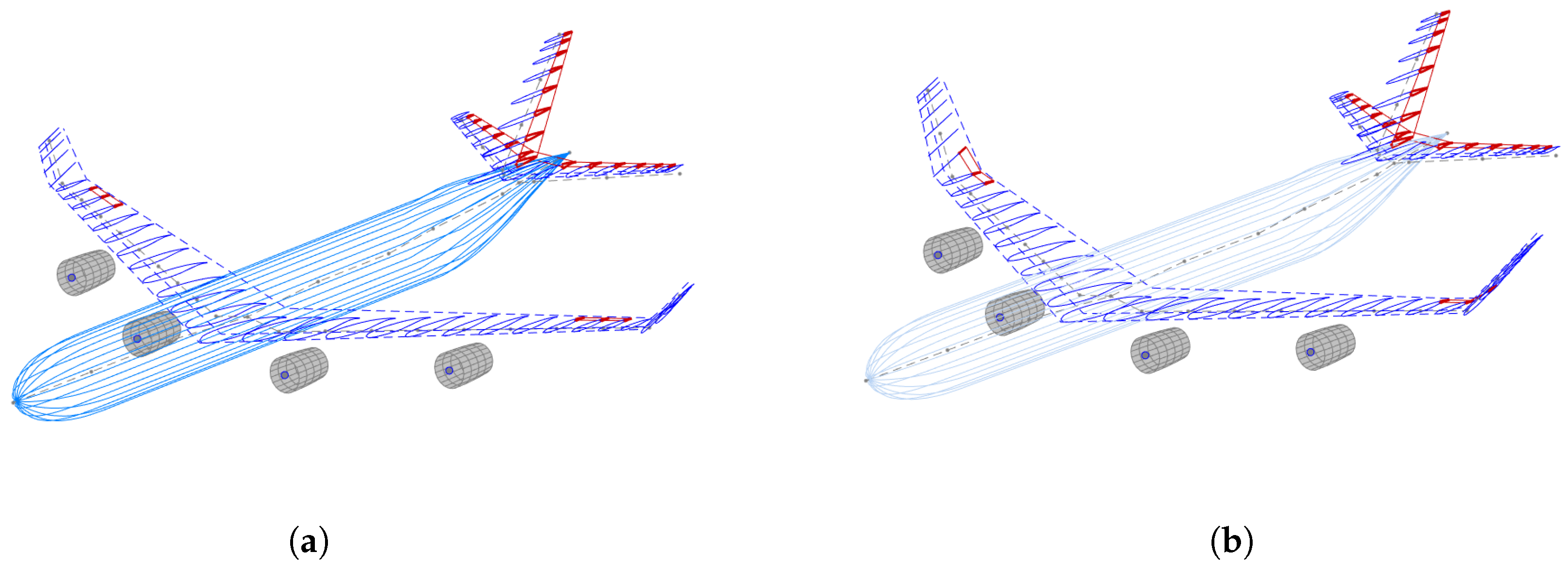
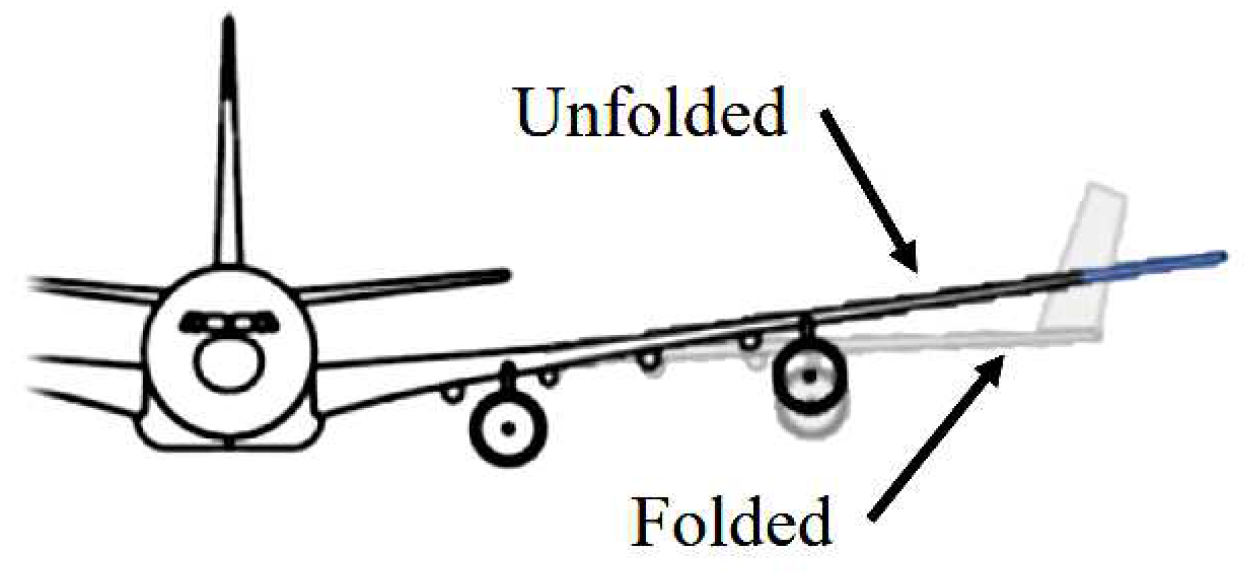
Figure 6 illustrates, somewhat excessively, the typical shape changes between a folded and baseline wing in a flexible state.
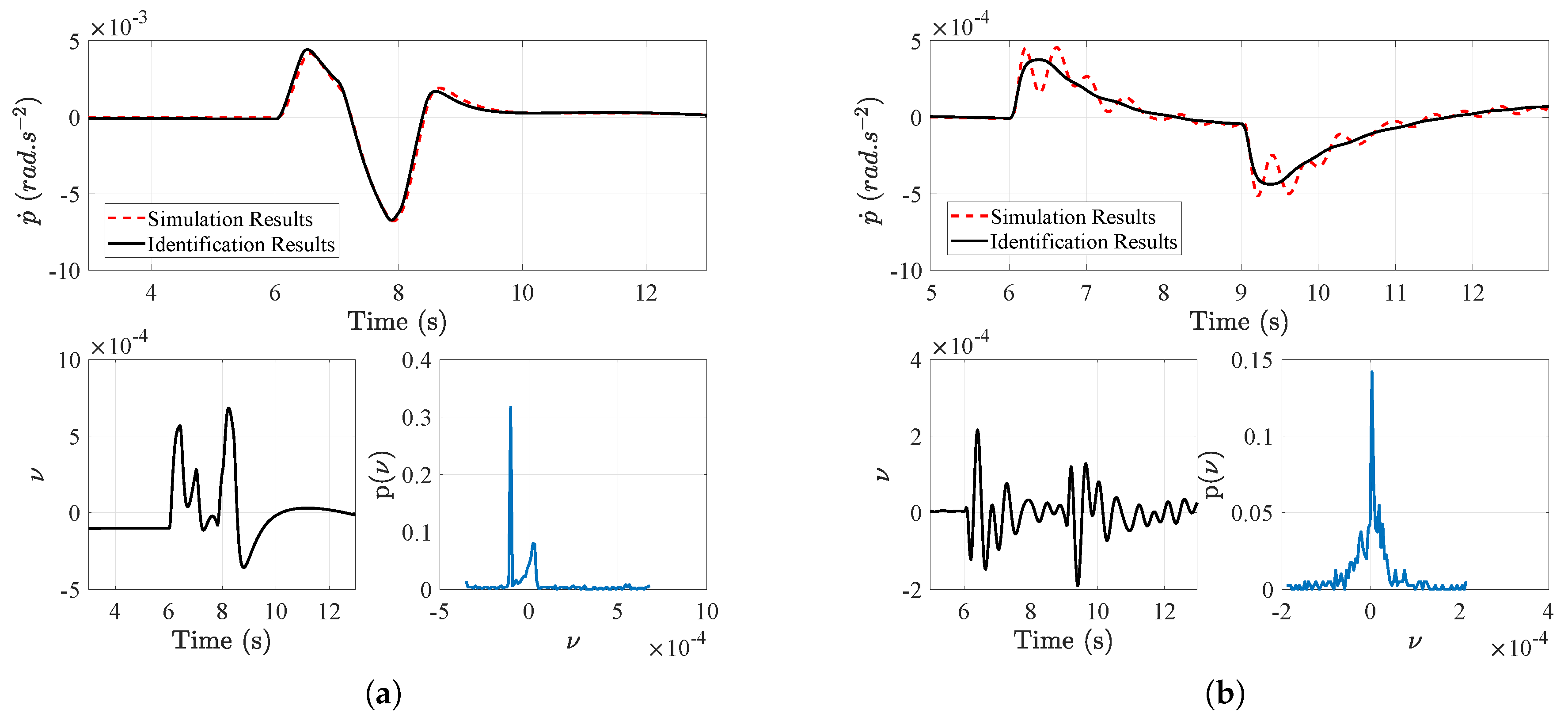
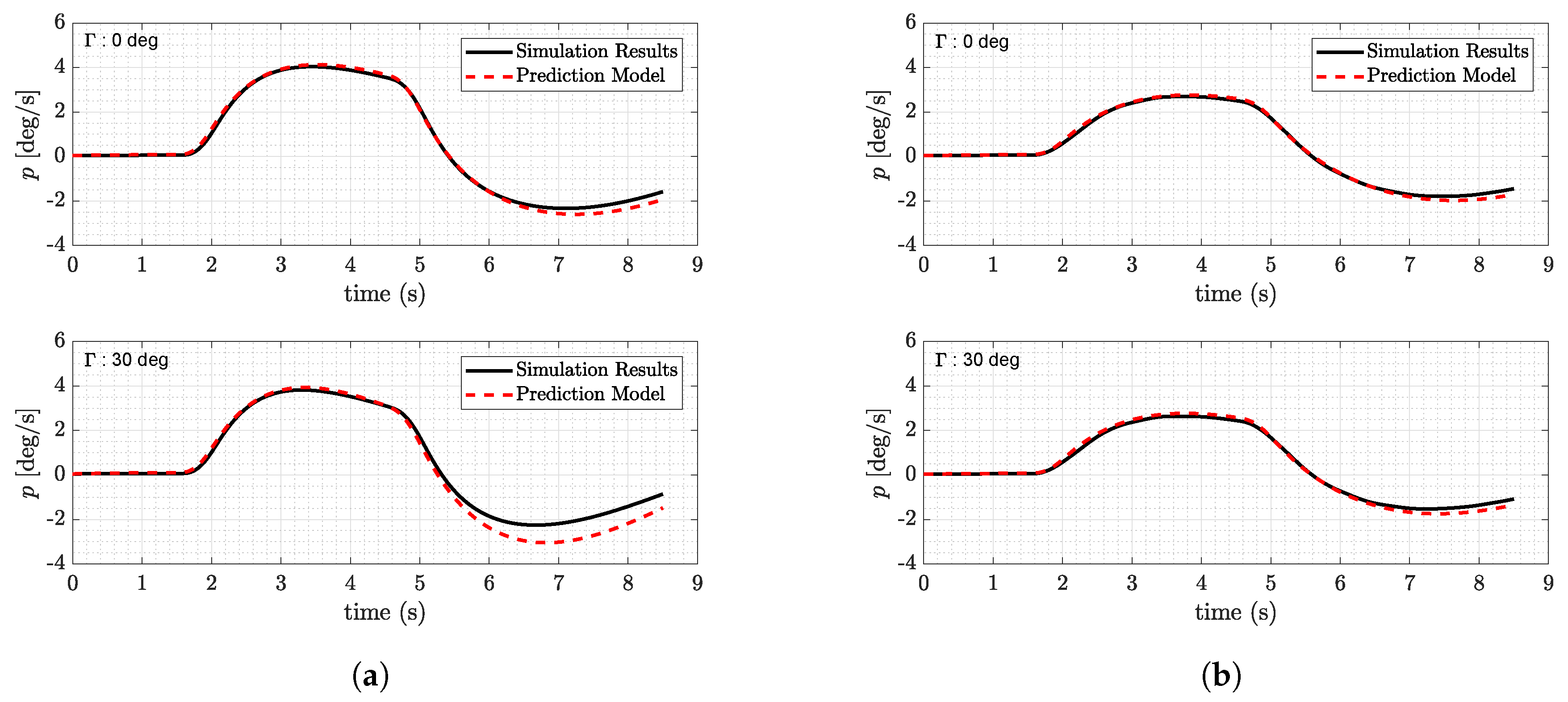
A low amplitude aileron step was used to excite the aircraft roll motion, away from cruise trimmed condition with a non-oscillatory lateral characteristic (additionally, low amplitude aileron doublet and 3-2-1-1 type inputs were used for comparison purposes, although not presented herein). Despite low aileron deflections, steady state roll rate was achieved for the input deflection before large attitude changes were reached. Small perturbations were introduced in the open-loop system, respecting the assumptions required for the systems identification procedure whilst achieving maximum roll rate for a given input which is important for aileron effectiveness identification.
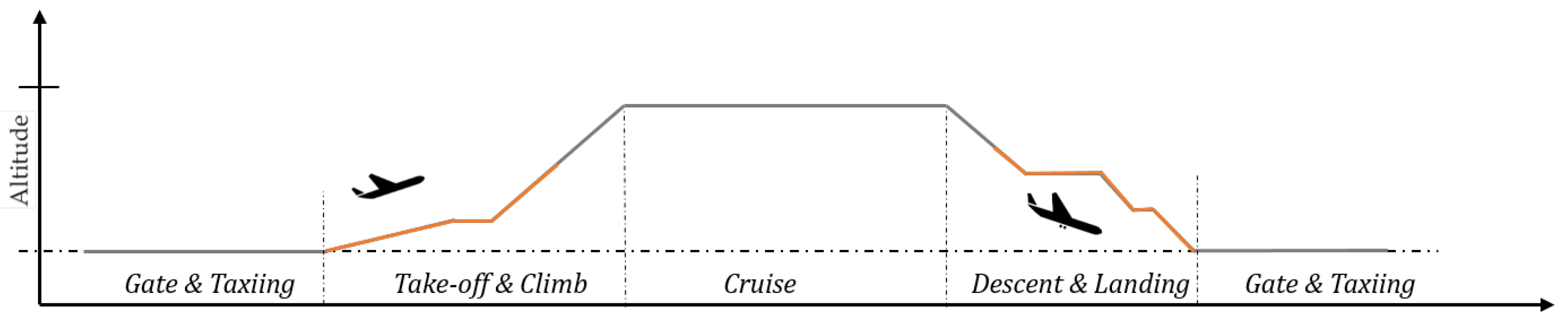
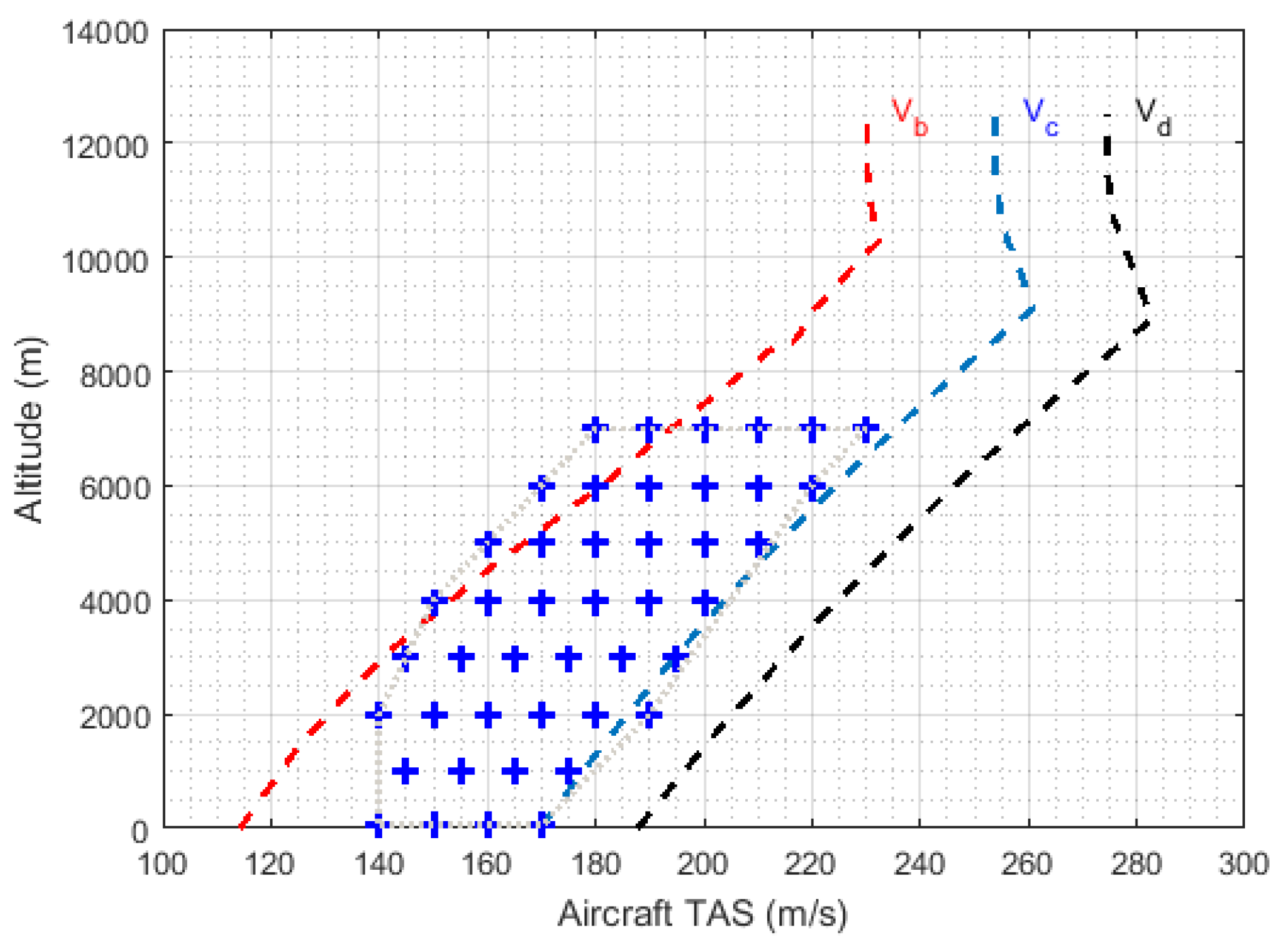
Flight conditions selected for this study correspond to the lower altitude and airspeeds of the AX-1 design envelope so as to match dynamic pressure conditions comparable to “Take-off and Climb” and “Descent and Landing” conditions, as shown in
Figure 7.
Figure 8 highlights the 44 flight points selected throughout the flight envelope with ranges of dynamic pressures, altitude and airspeeds experienced at these conditions being given in
Table 1. Additionally, the full set of flight conditions is given in
Table A1 in
Appendix C. The aircraft was considered in steady level flight, with a small perturbation introduced to capture lateral dynamics. These conditions can be argued to be similar to loitering motion with large turn radius at constant altitude prior to landing. Climbing and descent flight paths were not considered due to framework trim set-up limitations.
At each of the flight conditions, the aircraft was trimmed in steady level flight in a baseline shape using conventional aircraft controls and no high lift devices (due to current modeling limitations). Trim is achieved after linearization of a reduced-order version of the model (for simplification reasons). An equilibrium (or trim) point was found for each conditions when the steady-state value for each of the state derivatives (with the exception of the aircraft position) was equal to zero (corresponding to steady level flight). When applying symmetric folding input, a correction was applied to the elevator to balance the pitching moment induced by the deflected wingtips and added to the trimmed elevator deflection.
5.3. Aerodynamic Derivative Shift Due to Wingtip Folding
As a result of small perturbation roll maneuver simulations at 44 flight conditions, multiple airframe flexibility and folding angles, an extensive database of
and
values was generated. This allowed for trends in aerodynamic shifts to be identified. These results were also compared to those of a similar aircraft configuration such as those obtained from flight test campaigns of a Boeing B747 [
31] and found to be adequately similar for both
and
. On the other hand, due to the lack of directional coupling and the relatively low sideslip induced during the maneuver, the identification process led to less reliable and higher discrepancy in
estimates at a number of flight points and overall trends. This effectively led to these results not being included in the following discussion (The authors are investigating alternative inputs and identification method for both
and
coefficients. Moreover, a coupled lateral-directional mathematical model would be required to adequately capture
, more relevant to coordinated turn (through a combination of rudder and aileron) than roll motion.).
Results presented herein are displayed as a function of both dynamic pressures
and angle of attack
, varying over the range of flight conditions. Smooth surface trends are obtained as a function of these two parameters, selected for their relevance to pilots and flight dynamic analysis for further developments.
could also have been used (replacing
), although a secondary parameter such as angle of attack would still have been required to better understand the trends captured herein.
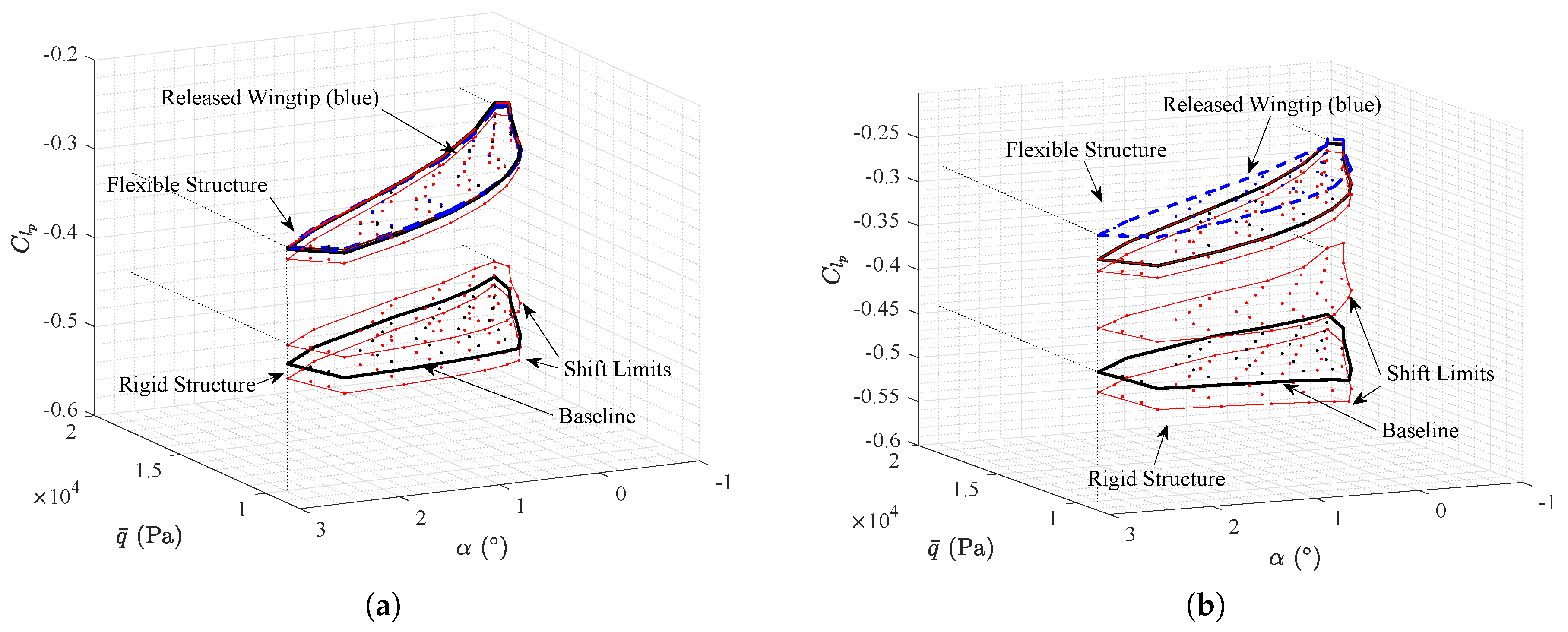
Figure 10 and
Figure 11 illustrate the trends in aerodynamic derivative changes due to flight conditions. Changes due to wingtip angle effectively lead to a shift of the entire surface as a function of local parameters.
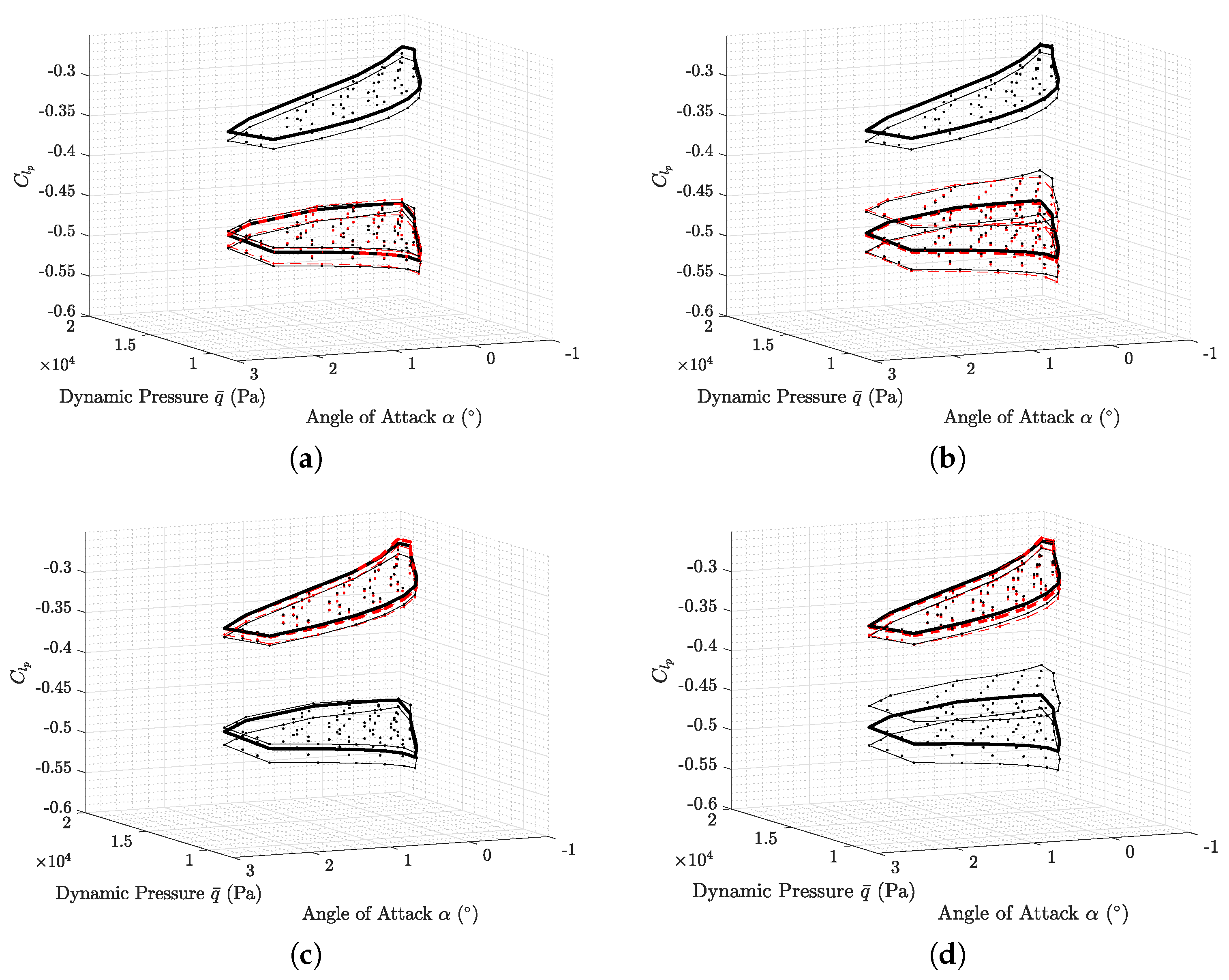
It was found as expected that
values were not only dependent on the aerodynamic shape but also on the flight conditions, as shown in
Figure 10b for the larger wingtip variant of the test set-up, where
values for both rigid and flexible airframes in baseline (non folded) and folded configurations are shown. These plots are based on the database generated in the scope of this work, an extract of which is included in
Appendix E for the larger wingtip variant. Differences in the baseline
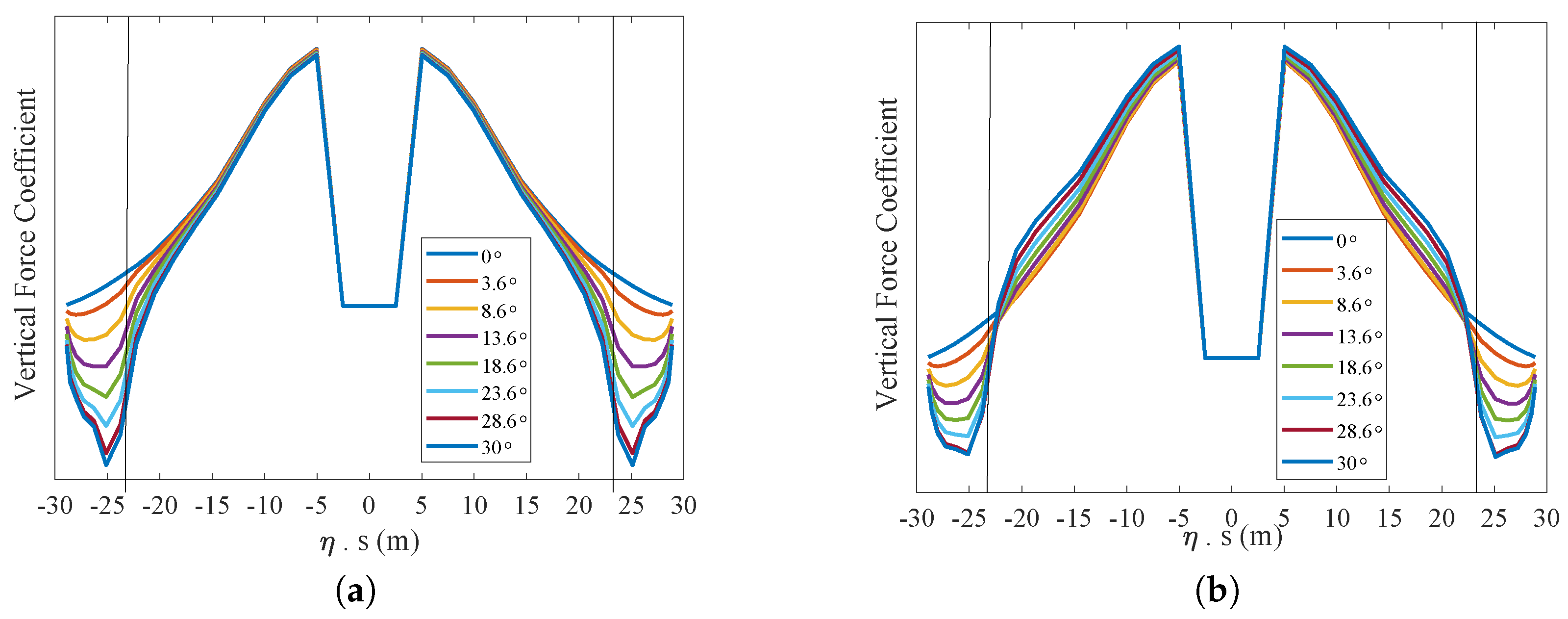
values for both rigid and flexible body structure are obvious and come as a consequence of the change in aerodynamic shape. The latter is changed due to the steady aerodynamic loading as well as the dynamic disturbance (roll rate). Introducing wingtip deflection also changes the aerodynamic loading, particularly tip-loading and overall aerodynamic lift and drag distributions, as shown in
Figure 4. On the flexible structure, this forces the structure to adapt and bend, effectively forcing more lift to be generated inboard of the hinge. As a consequence to this phenomenon, relatively small changes are observed on the
value in the flexible case when compared to the rigid structure. In fact, the same can be said for the
value.
For the rigid aircraft, the
value varies up to 20% relative to the baseline (see
Figure 10b or
Appendix E) in the worst case for the rigid aircraft. Note that such a change in roll damping is expected to be noticeable by the pilot if it is not corrected through the flight control system, though it should not deteriorate handling qualities to undesirable standard. For the flexible aircraft, a much smaller change of
is expected at the same flight and folding conditions, with an average of
expected in upward folding. Note that the released wingtip cases lead to more noticeable and important
changes of approximately 5–
.
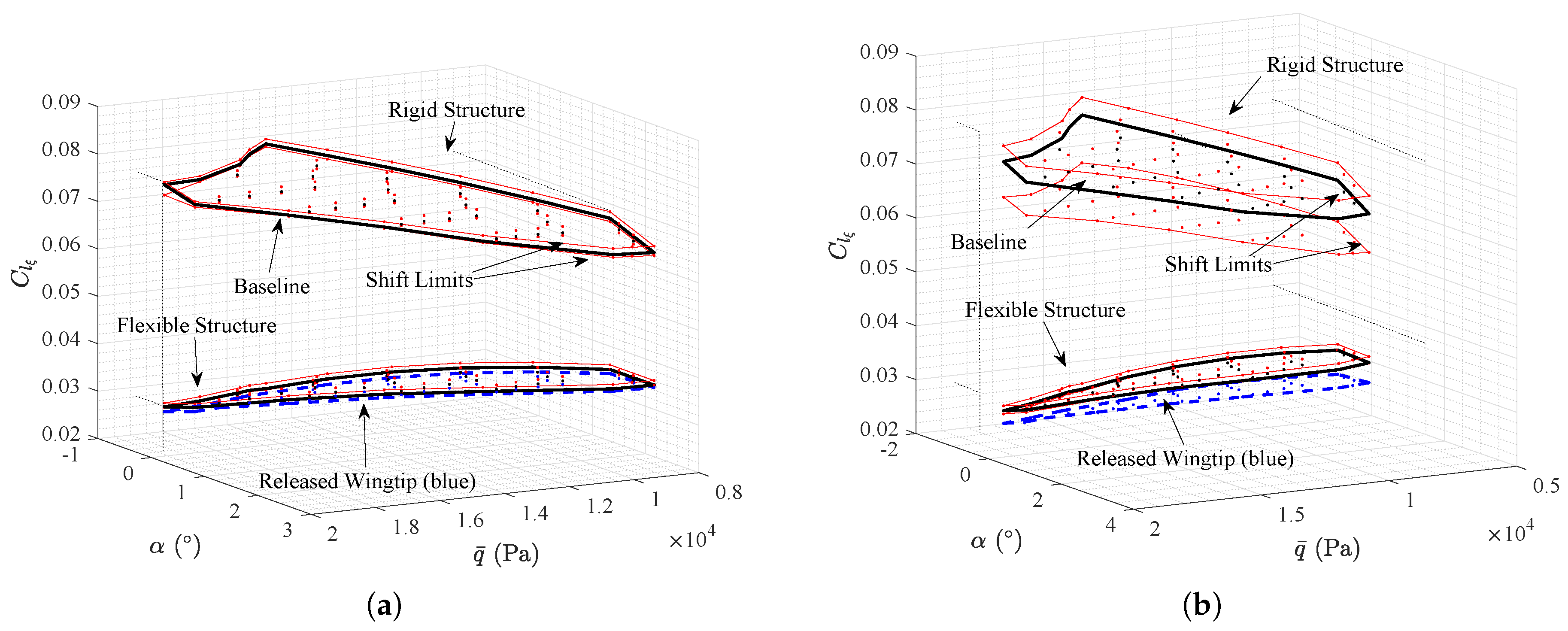
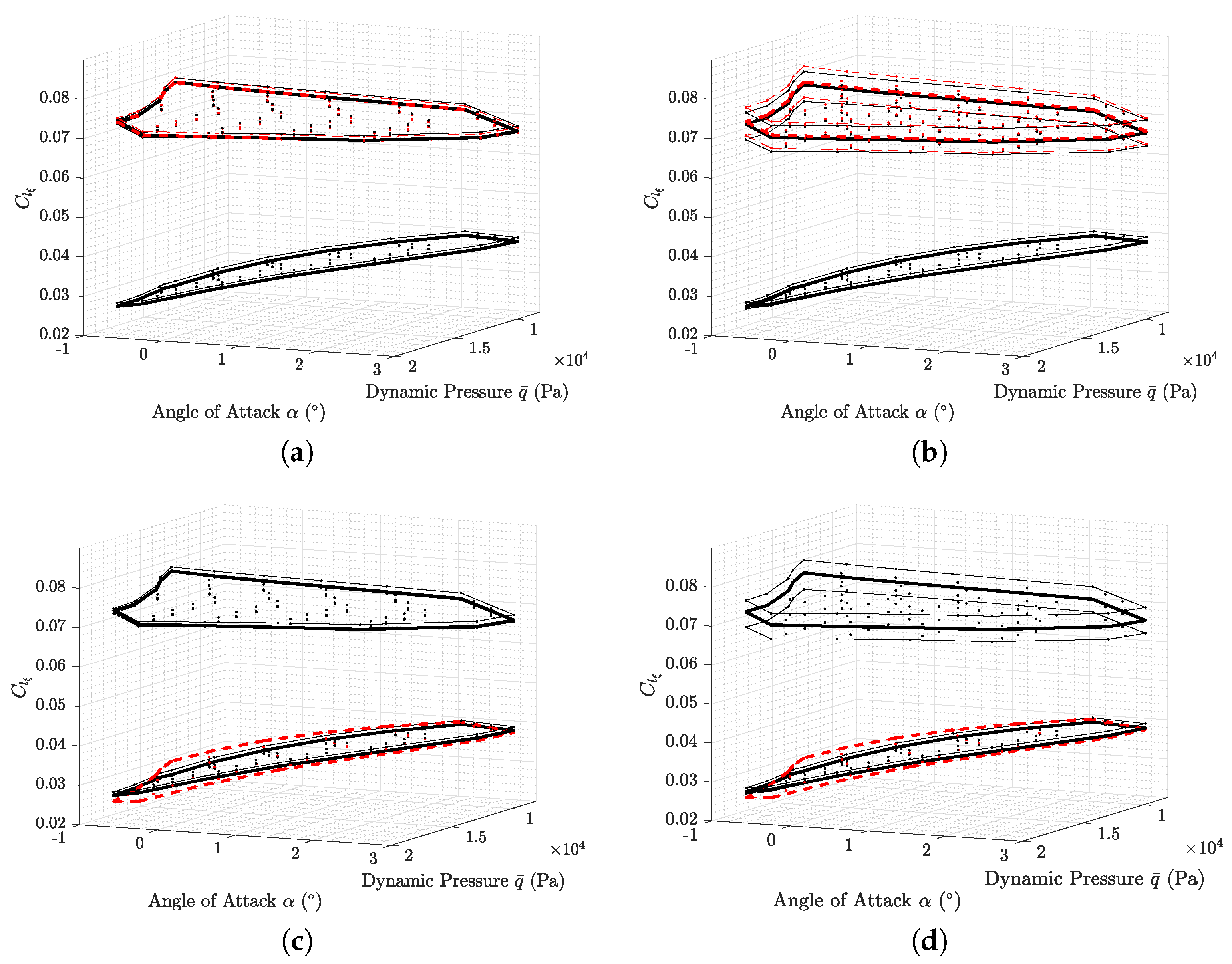
A similar analysis can be made to explain the underlying reasons for the change in
due to flexibility (and wingtip deflection). Changes in structural flexibility allows the aircraft to adapt to the modified aerodynamic loading and partly counter the effect of the aileron input, thus lowering the
value compared to that of a rigid aircraft (
Figure 11b for the larger wingtips). This phenomenon is not unheard of on very flexible wings where roll control inversion at high dynamic pressures have already been discussed. Similarly, small changes to aileron effectiveness are introduced with wingtip deflections. On the other hand, for the rigid body simulation set, the location of aileron and wingtip hinge line significantly impact the resulting
value. In the
wing semispan wingtip, the outboard limit to the aileron is far enough from the hinge line (
m) so that the wingtip deflection does not significantly impact the flow around the aileron. Aileron aerodynamics are not affected significantly. On the other hand, the
wing semispan wingtip size case introduces a hinge nearly overlapping with the aileron outboard limit. Nonetheless, changes to aileron effectiveness remain relatively low with fold angle, with shifts ranging between
and
in both upward and downward deflections. On the other hand, the change in aerodynamic loading on the aileron during wingtip release leads to a significant change in
value, with a maximum decrease of
relative to the baseline (
Figure 11b) in aileron authority, linked by the authors to flapping wingtip effects. For the rigid case, a change between
and
is introduced.
A quick look at the results presented in
Figure 10 and
Figure 11 can lead to the following statement: a greater change in roll dynamics is introduced when shifting from rigid to flexible airframe, than when flying the aircraft with different fold angles throughout the flight envelope. Thus, it can be stated that switching from a rigid to a flexible aircraft would prove by far more challenging to a pilot than the folding of the wingtips themselves.Additionally, it also shows that the wing flexibility greatly dampens or reduces the wingtip folding effects. In the case of a very rigid wing, the controlled folding of the wingtips would have a greater impact on the aircraft response, as shown by the rigid simulations given herein. These are very promising results for further development of the design as a lower impact of wingtip folding on the handling qualities of a flexible aircraft might lead to positive pilot perception of the system and relatively minor flight control law changes (at least for lateral control) can be expected.
Additionally, the authors believe that it is relevant to state that the released or loose wingtip state appears in this study as most suitable for roll performances: with a decreased roll damping and only slight reduction in aileron authority, the authors believe that loose wingtips could be efficiently used during maneuvers to restore some roll performances lost by increasing the aircraft span in the case of a HARW concept. Note that, with lower roll damping, the upward fold of the wingtip for a rigid aircraft gives a more suitable shape for roll maneuvers. With increasing wing flexibility, this effect can dissipate, as seen herein. Note that aircraft range or climb performance are not considered and should also be taken into account when considering suitable wingtip or winglet designs.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}














