1. Introduction
At present, most small satellites are launched as secondary payloads on large launch vehicles. A remarkable example of piggybacking payloads took place on 19 June 2014, when the Dnepr launch vehicle, in a single mission, placed 33 spacecrafts in orbit, including the Brazilian nanosatellite NanoSatC-Br1. On 14 February 2017, the PSLV, from India, deployed a record of 104 satellites in a single mission, of which 101 spacecraft were cubesats. On 3 December 2018, Falcon-9 from SpaceX delivered 64 satellites in a sun-synchronous orbit from Vandenberg Air Force Base SLC-4. The dedicated rideshare launch was contracted by Spaceflight Industries for the SSO-A smallsat express mission.
A major breakthrough in the small satellite launch service took place on 21 January 2018, as the Electron launcher placed three nanosatellites in the programmed orbit [
1]. As for June 2019, the Electron launch vehicle had already delivered 28 satellites distributed in six different missions. The micro-launcher is capable of placing up to 150 kg of payload in a 500 km circular sun-synchronous orbit. At 45
, elliptical orbit, with 180 km perigee and 500 km apogee, the payload capacity increases to about 220 kg. The launch system, operating from Rocket Lab Launch Complex 1 (Mahia, New Zealand), can deliver satellites in orbit inclinations limited to 39
to 98
, and customers may choose dedicated or rideshare launch.
Small satellites have become a trend in the space segment. The benefit-cost ratio of such systems is now attractive to traditional and newcomer stakeholders that are populating the market with a variety of solutions and applications with growing levels of quality at competitive prices. Developers want to provide standalone services relying on small satellite constellations, such as remote sensing, communication, Internet of Things, and so on. As a result, there has been an increase in demand for space transportation of such small devices. More than a dozen launch vehicles, with LEO launch capacity ranging from a few kilograms up to a few hundred kilograms, are under development worldwide, mostly by private investors.
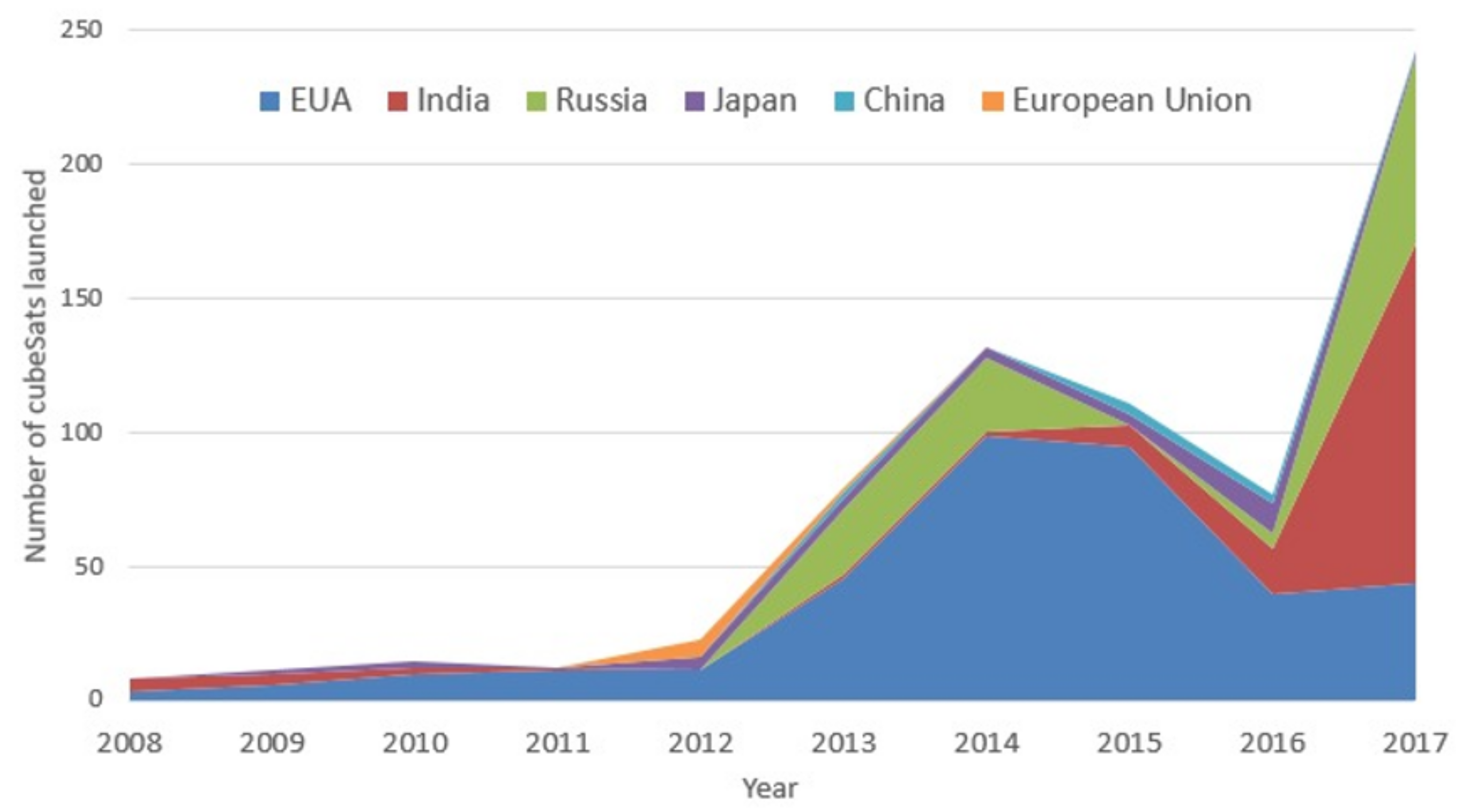
Cubesats are a good case in point exemplifying this boom in the sector of small satellites, which will drive the launch services market. In less than a decade, the number of cubesat launches has grown from very few to more than a hundred per year, as displayed in
Figure 1. The chart was produced using information from 1058 spacecraft available at the Cubesat Database Saint Louis University [
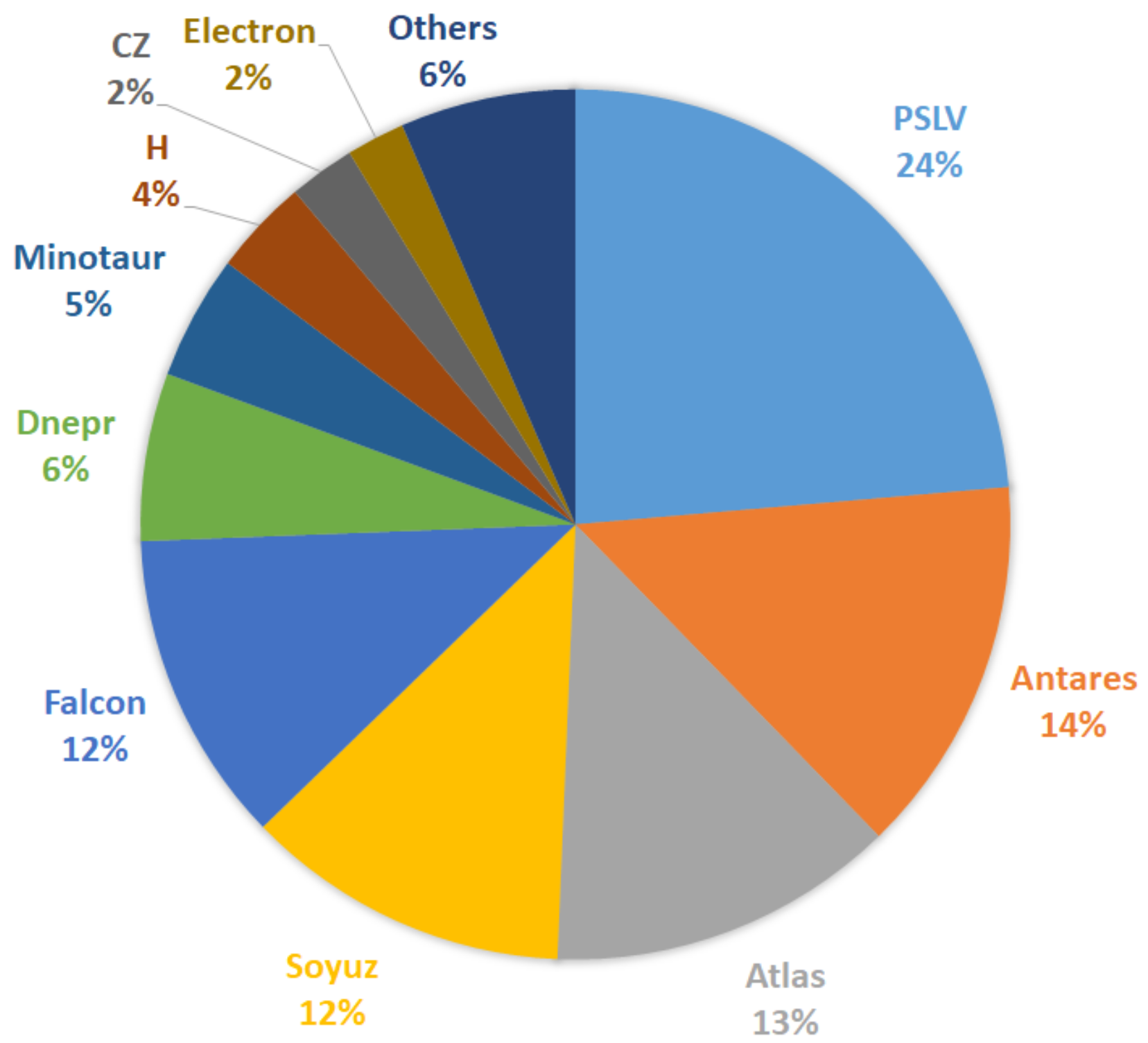
2]. The market is observing the small satellite trend with great attention. When we examine the log data from the last decade of cubesats launched, from 2008 until the end of 2019, we see a scenario clearly dominated by American (USA), Indian, and Russian launch vehicles. If we sort these vehicles as a function of the number of cubesats inserted into orbit, we verify that PSLV, Atlas, Antares, Soyuz, Dnepr, and Falcon are leading this trend, as shown in
Figure 2, but, except for the Electron launcher (Rocket Lab), none of these rockets was specifically designed to launch small satellites [
2].
Rocket Lab started the commercial exploitation of the Electron launch vehicle in November 2018, after two qualification launches on May 2017 and January 2018. Since 2018, the company has conducted six missions, giving an average launch rate of three per year. The company was granted a license to perform a launch every 72 h, meaning more than 100 launches per year [
3].
The Brazilian system for the development of space activities is composed of three public entities, the Brazilian Space Agency, as the central organization, the National Institute for Space Research (INPE) and the Institute of Aeronautics and Space (IAE). INPE is responsible for the development, integration, and test of spacecrafts while IAE is concerned with the development of sounding rockets and launch vehicles. The industrial sector and academia complete the system.
For decades, the Brazilian Space Agency (AEB) and the German Aerospace Center (DLR) have been cooperating in many space-related activities. DLR-Moraba, for instance, is investigating hypersonic flight techniques through re-entry vehicles launched from sounding rockets developed in Brazil. The program has already conducted two experiments, SHEFEX-1 and SHEFEX-2 [
4], based on different launching platforms. The launch system for SHEFEX-2 was a two-stage sounding rocket, comprised of an S-40 and an S-44 solid rocket engines designed by IAE-Brazil.
For a potential SHEFEX-3 experiment, Moraba partnered with IAE-Brazil to support the development of a novel three-stage vehicle with increased payload capacity. It has been decided that Brazil would develop a new solid rocket engine, named S-50, to perform as the first and second stages of the improved launch system. The new launch vehicle would also rely on an S-44 engine for the upper-stage, the same used in the SHEFEX-2 experiment. In this configuration, the launch system would be capable of placing small payloads into low Earth near-equatorial orbits. The launch system was then named VLM-1 (Microsatellite Launch Vehicle).
The ongoing National Program of Space Activities points IAE-Brazil as the prime contractor to develop the VLM-1 launcher.
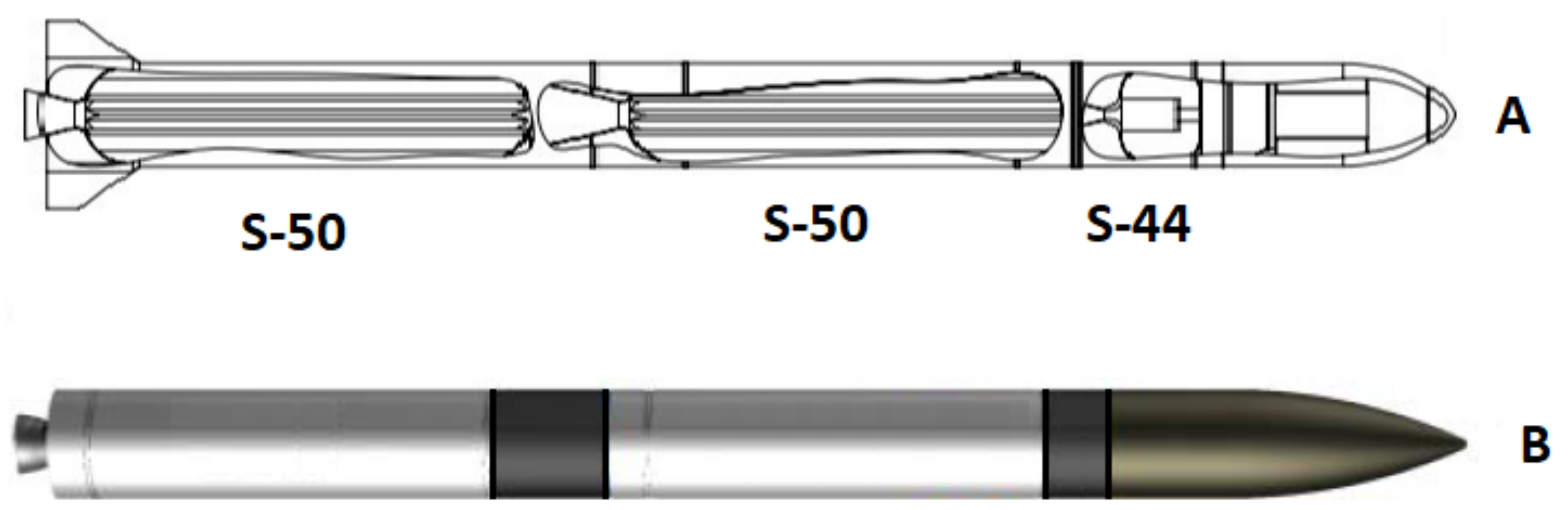
Figure 3 shows the micro-satellite launcher for orbital missions (A) and its sub-orbital version (B) as claimed by the SHEFEX-3 experiment. In the basic configuration, the launch vehicle has, approximately, 18 m of length, 1.4 m in diameter and 26 tons of total weight. The S-50 rocket motor was designed to have about 11,100 kg of propellant, 440 kN of average thrust, 266 s of sea level specific impulse. The S-44 solid rocket motor has about 800 kg of propellant, 38 kN of average thrust, 277 s of vacuum specific impulse. The S-50 motor is scheduled to have qualification tests within 2019–2021 period, whereas the S-44 motor is already qualified. In this configuration, the launch vehicle has a payload mass capacity of about 50 kg, for a 500 km altitude polar mission. For low-inclined orbits, the payload capacity increases to about 150 kg.
Based on these mass figures, the specific transportation cost of VLM-1 would be over US$100,000.00 per kilogram of payload inserted in high inclined orbits. From a commercial point of view, this high specific transportation cost resulted in serious concerns about the vehicle’s market penetration. Therefore, the Brazilian Space Agency and the MORABA team from DLR (Germany) conducted independent studies to enhance the performance of the VLM-1 launch system. Besides increasing vehicle performance, the Brazilian team also investigated the costs of development and operation of selected launch vehicle configurations based on the VLM-1 platform.
A survey of the literature showed that very few journal articles pay attention to cost analysis in the creation of future launch systems for the satellite market [
5]. Duret and Fabrini [
6], who addressed key aspects of the Vega launch system development plan, estimated the launch price of 18.5 M€(as in 1999) for one metric ton of payload mass, inserted in a circular polar orbit at 700 km of altitude. No detailed information, though, was given on cost assessment for the proposed launch system. The launch price for the Vega rocket weeks before the maiden flight was estimated at about 32 million euros [
7]. Corrected for inflation, the estimated launch price of 1999 would be approximately 24.5 M€ in 2012 and 26 M€ in 2019. These figures are clearly much higher than the reported estimates of Duret and Fabrini [
6]. Vega payload lift capability is 1430 kg for 700 km polar circular orbit insertion. The launch system can, therefore, place small to medium sized payload mass with a specific transportation cost of about 19,000 US
$/kg of payload.
More recently, Drenthe et al. [
8] presented a hybrid novel tool for space system cost analysis. The proposed model is based on subsystem level development costs estimates, proposed by the authors, in combination with operation cost correlations from the TRANSCOST model. Manufacturing cost predictions were compared to three launch system, a sounding rocket (Maxus 9), Falcon-1 and Pegasus XL. Price per flight estimations were conducted for Falcon 1 and Pegasus XL. Overall, the accuracy of the proposed hybrid model was within 20% for both manufacturing and operation costs.
In a recent review, Wekerle and colleagues [
9] listed a series of launch vehicles designed for the small satellite market. The reported specific transportation cost for those vehicles ranged from about 20 to 67 thousand US dollars per kilogram of payload. The authors inferred specific transportation cost after dividing the reported cost of the vehicle by its payload capacity delivered at some reference orbit.
In another publication Nightingale and collaborators [
10] listed a set of launch vehicles (operational and under development) with payload capacity varying from 1.33 to 584 kg, from which, specific transportation costs were in the range of 20 to 120 thousand US dollars per kilogram of payload. This large dispersion estimate on specific transportation cost would suggest a strong scaling effect considering limitations in vehicle performance, which depend on the type of technology adopted for the stages as well as how the vehicle is fabricated and the launch system operated. Heavier expendable launchers have ratios of payload mass to launch mass as high as 4% compared to less than 1% for the smaller launchers. In comparison to heavy launchers, one should expect much higher specific transportation costs for those small vehicles [
11]. Most of the heavier launchers (the US and European) operate in the range of, roughly, 13 to 34 thousand dollars per kilogram of payload. Small satellites, however, are launched as hosted payloads from these heavy platforms.
For the last couple of years, a great number of launch vehicle developers have unveiled their systems with a target launch price for small payloads (<500 kg) that seems too low for that class of vehicle. It is clear, therefore, whether comprehensive cost analysis is a key element in the development of future commercial launch systems. In this paper, we present a cost analysis of three launch vehicle systems that could offer competitive prices to deliver small satellites at dedicated orbits. We combined a detailed cost valuation for development, fabrication and operation (direct and indirect costs) along with vehicle performance to infer launch system specific transportation costs.
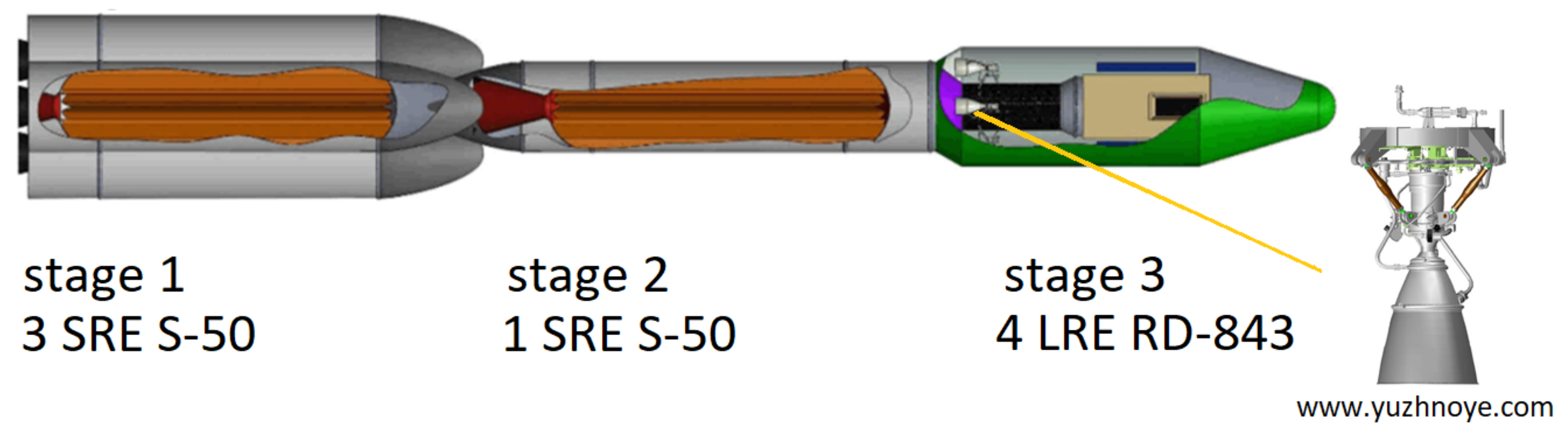
A straightforward vehicle configuration was obtained by simply adding two S-50 motors to the first stage of VLM-1 launcher. Therefore, the proposed vehicle would rely on three S-50 motors for the first stage, one S-50 motor for the second stage and one S-44 for the upper-stage.
The next two concepts follow the preliminary version of the Ariane-6 family in which the first stage would comprise a bundle of three identical solid-rocket motors, operating as a single unit, and the same solid motor would be employed in the second stage. A LOx/LH engine was considered for the upper stage. The final concept of Ariane-6, however, changed to a modular three-stage launcher (solid–cryogenic–cryogenic). Similarly, we targeted increased commonalities among lower rocket stages and very low development effort for the upper stage, taking advantage of COTS (commercial off-the-shelf) propulsion hardware from the satellite industry. Therefore, in the other two proposed configurations, the launch vehicle combines three S-50 solid motors for the first stage, an S-50 motor for the second stage and a more conventional upper stage based on a pressure fed liquid rocket engine relying on hypergolic storable propellants. In this case, the main differences between the upper stages are related to the total engine thrust and propellant mass.
The launch system would operate from the Alcantara Launch Center in Brazil. The launch site is located 220’ S, making it the closest to the Equator, as compared to any other permanent launch centre worldwide. By virtue of its geographic position, launch operations allow rocket expendable stages and payload fairing to fall in the Atlantic Ocean reducing, accordingly, insurance coverage regarding third party and government property damage.
3. Results and Discussion
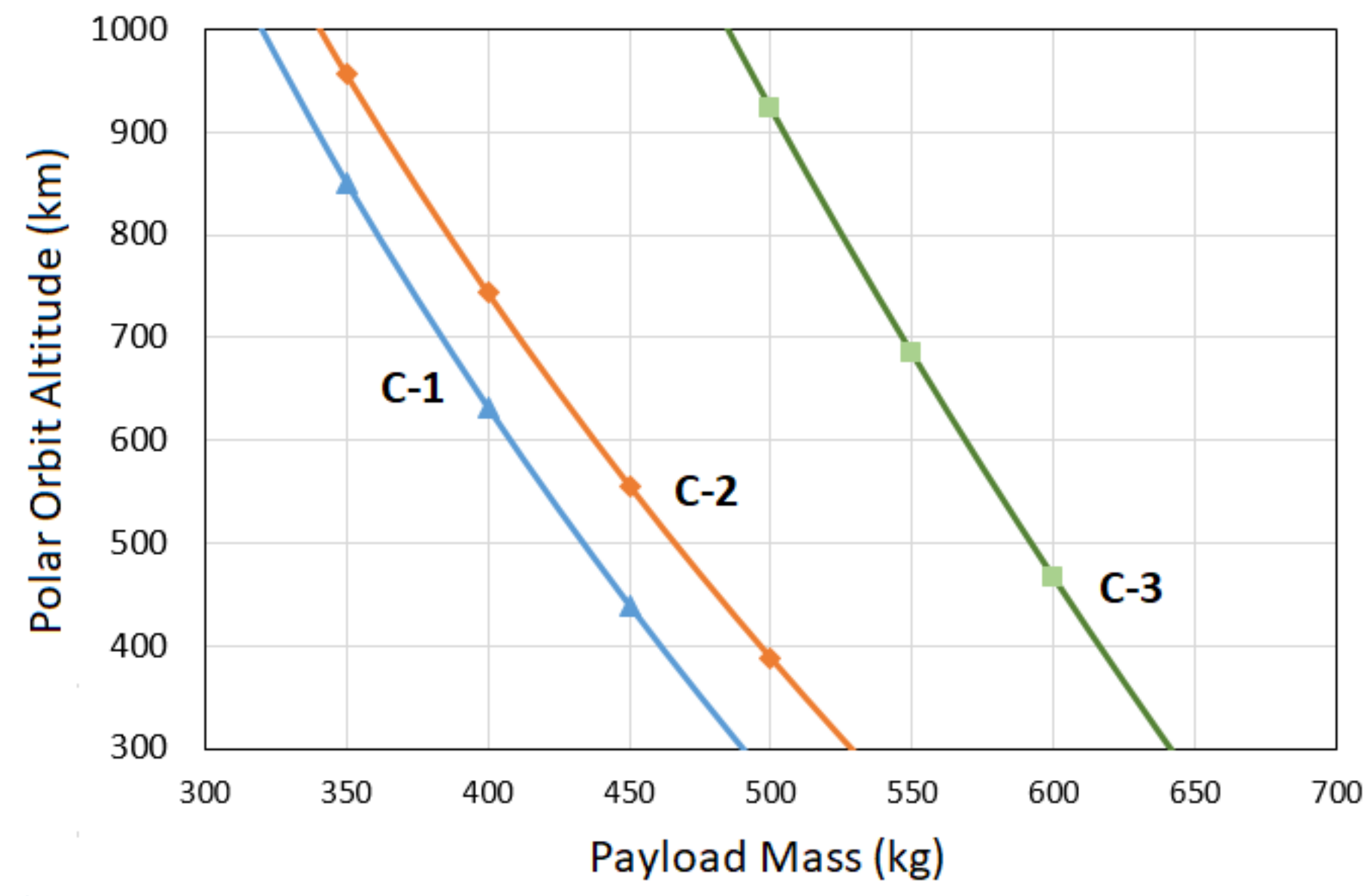
Figure 6 presents vehicle performance curves (
DBallistic model) for a range of orbital altitudes (300 to 900 km) in sun synchronous missions. For the calculated altitude range, the vehicle concepts could launch payload masses stretching from about 350 to 650 kg, thereby covering the entire spectrum of the small satellites class. We considered, throughout our analysis, 500 km altitude, circular polar mission, as a reference orbit. As it can be seen, concept 1 would deliver a payload mass up to about 436 kg, to the reference orbit, while concepts 2 and 3 would deliver a total mass of about 467 and 593 kg, respectively. Concept 3 is the only one capable of sending a satellite relying on the Brazilian Multi Mission Platform-MMP ( 500 kg) on polar-orbiting missions in the range of 300 to nearly 900 km. The Brazilian Space Program [
18], in its 10 year long program, lists a certain number of remote sensing and scientific missions based on the multi mission platform. The qualification flight of the platform is schedule to take place in 2020, carrying a wild field image sensor for optical remote sensing application. When operational, concept 3 would, therefore, give access to space to the majority of the Brazilian satellite missions for LEO.
The performance plots show a modest gain in payload capacity by changing the upper stage solid motor (S-44) of concept 1 by a pressure fed liquid engine of 2.50 kN thrust. Thrust modulation and re-ignition capabilities would make concept 2 preferable over concept 1, from a purely operational point of view. The choice between these two concepts would depend on a cost analysis prior to the definition of a business plan for the space launch system. It can also be seen, in
Figure 5, that the use of four RD-843 engines (concept 3), performing up to 10 kN of thrust, greatly increases the capacity of the launch system. The definition of which transportation system could be implemented must rely on performance and cost assessment for various scenarios and vehicle configurations.
As far as performance is concerned, concept 3 would be a potential launch system for the small satellite market, operating from the Alcantara Launch Center. At lower altitudes, about 500 km (circular polar orbit), concept 3 would deliver a payload as heavy as 593 kg. For lower orbit inclination (near equatorial), the capacity of the concept 3 launch system increases to about 725 kg, at 500 km altitude mission from the Alcantara Launch Center. With regards to concepts 1 and 2 the launch systems would deliver payloads up to 550 and 565 kg, respectively, in LEO equatorial missions.
The launch capacity of the three concepts are higher than most of the vehicles (micro launchers) under development, reported in a recent compilation [
9]. Concept 3, thus, would fill a gap for the mini-satellite launch market (500 kg) considering dedicated missions for low Earth orbit, in any requested inclination, from the Alcantara Launch Center.
In addition to vehicle performance, we also conducted a cost estimation analysis for the selected vehicle configurations. Cost analysis was based on the specific set of Equations (
18)–(
30) and correction factors.
Table 3 summarizes the value of each correction factor for system development, fabrication and ground and flight operations costs analysis.
System engineering integration factor () was taking into account for the launch system development cost by simply setting the number of stages equal to three. Development standard factor ( = 1.1) was taken as a first generation system, which require new techniques and new technologies along with the development. IAE-Brazil is internationally recognized as a preeminent organization in solid rocket propulsion development based on metal casing technology, and is rapidly acquiring knowledge in composite casing structures. The first S-50 motor engineering model had been subjected to structural analysis. The composite motor casing was approved to initiate the static fire test campaign. Technical quality factor () relates to the minimum number of engine qualification tests necessary for a given reliability. It has to be applied in the development of liquid rocket engines, whose qualification campaign claims hundreds of test firings. The RD-843 engine is already qualified. For solid rocket engines, fewer tests are necessary; therefore, we consider a unit value for the quality factor. Team experience factor () was taken as 0.75 by virtue of the technical staff long expertise in the development of similar projects. We assumed a lower value for these factors considering the qualification of our technical staff (IAE-Brazil), the associated infrastructure and the level of maturity of the Brazilian space industry in solid rocket production, notably AVIBRAS. The learning factor () adopted in the present work considered the large number of motors expected to run the launch system based on the adopt commonalities. At a launch rate of 12 missions per year, 48 S-50 motors would be necessary to assemble the first and second stages. The production rate of S-44 would be 12 per year. Liquid engine development cost (RD-843) is null considering it is an off-the-shelf component, and, therefore, the learning factor was subjected only to stage integration. The correction factor for vehicle performance estimates accuracy () was set to the highest expected error (3%) from the DBallistic model, i.e., 1.03. We assumed a margin of 10% of deviation of the development time schedule, thus setting a value of 1.1 for this programmatic factor (). The programmatic factor referring to the number of organizations contracted () for vehicle development was set to unity, considering that IAE-Brazil is the sole prime-contractor responsible for the project development. The productivity correction factor, which is a relative measure of annual working hours, education and dedication to work of a country (US as the reference, = 1), was set as 1.1, or, a 10% increase in the WYr compared to the US counterpart. The impact on the launch vehicle type () was taken as 0.3 which is suggested for solid propellant vehicles. The impact of the launch vehicle assembly and integration mode () was set to 0.5, corresponding to horizontal assembling and transport to pad for erection. Stage complexity factor () was taken as 0.15 for stage comprised of small solid rocket engines and 0.4 for a stage relying on liquid rocket engines.
Business plans for the small satellite launch providers are often based on a very high number of launches per year (≈100). For such figures there should be more than one launch site with dedicated operation teams. For indirect operation costs () we assumed that the Alcantara Launch Center can sustain, in its commercial phase, up to 12 launch campaigns per year. This pace, however, can only be achieved after performing a certain number of missions during two to three years following the maiden flight. The number of total flights were set to 100, over a decade of system operation. Nominal profit and additional costs were set to 5% and 1% of the cost per flight (CPF), respectively.
Table 4 presents the estimated cost parameters for the three launch vehicle concepts. Cost per flight, in dollars, was estimated after multiplying the correspondent cost in work years by the cost, in dollars, of one WYr. Specific transportation cost (Equation (
30)) was inferred diving the sum of the related costs by the payload mass capacity, for a given reference orbit (@ 500 km, polar). A correction factor was employed to consider the vehicle performance estimates from the
DBallistic model. Monetary data was rounded up to million.
For concepts 1, 2 and 3, the maximum payload mass insertion capability for the reference orbit, calculated by the DBallistic model, was 436, 467 and 593 kg, respectively. Vehicle development effort for the configurations 1, 2 and 3 was 755, 754 and 782 WYr, respectively. We can see that development efforts for concepts 1 and 2 are quite similar and concept 3 claims about 4% more work and investment than the previous ones. Considering a WYr equivalent to 102,000.00 USD (Brazilian figures), the development cost in US dollars for concepts 1 and 2 would approach 77 million, while for concept 3, near 80 million. The replacement of the S-44 solid motor by a cluster of RD-843 liquid engine proved adequate by taking into consideration a 36% increase in launch mass capacity for less than three million dollars added to develop the launch system as compared to concept 1.
Vehicle fabrication costs are in the range of 141 to 175 WYr, with the lowest value for the all-solid stages concept and the highest for the vehicle concept based on a cluster of RD-843 engines as the upper stage. In US dollars the effort would represent nearly 14, 16, and 18 million, for vehicle concepts 1, 2 and 3, respectively.
The share of direct operation cost from the associated values of fabrication and operations (direct and indirect) is about 4.5% for concept 1, decreasing to 3.87% for concept 3. The share of propellants cost in the cost per flight is less than 2% for all the concepts. Amortization of development, nominal profit and additional costs amounted 18.6, 19.6 and 21.2 WYr, respectively for concepts 1, 2 and 3, representing about 10% of the respective cost per flight.
As it can be seen from
Table 4, the cost per flight, in dollars, varied from 19 to 23 million. In terms of specific transportation costs, the proposed vehicle configurations would charge about 43, 44 and 39 thousands of US dollars per kilogram of payload inserted into the reference orbit. For comparison, the Scout small launch vehicle, a four stage all-solid launcher that operated from 1961 to 1994, totalling 99 missions, had a specific transportation cost of 0.4 WYr per kg of payload inserted into LEO [
16]. Thor Delta-E was another small launch vehicle (540 kg @ LEO) which operated in the 1960s with estimated specific transportation cost of 0.6 WYr/kg [
16]. The calculated specific transportation cost for concepts 1, 2 and 3 would be 0.42, 0.43 and 0.38 WY/kg, respectively. Therefore, the proposed launch systems have estimated costs similar to retired launch vehicles of the same class. These figures also confirm the higher cost per kilogram for smaller launchers compared to heavy-lifters, for which the reported specific transportation cost is in the range of 0.04–0.1 WYr/kg [
16].
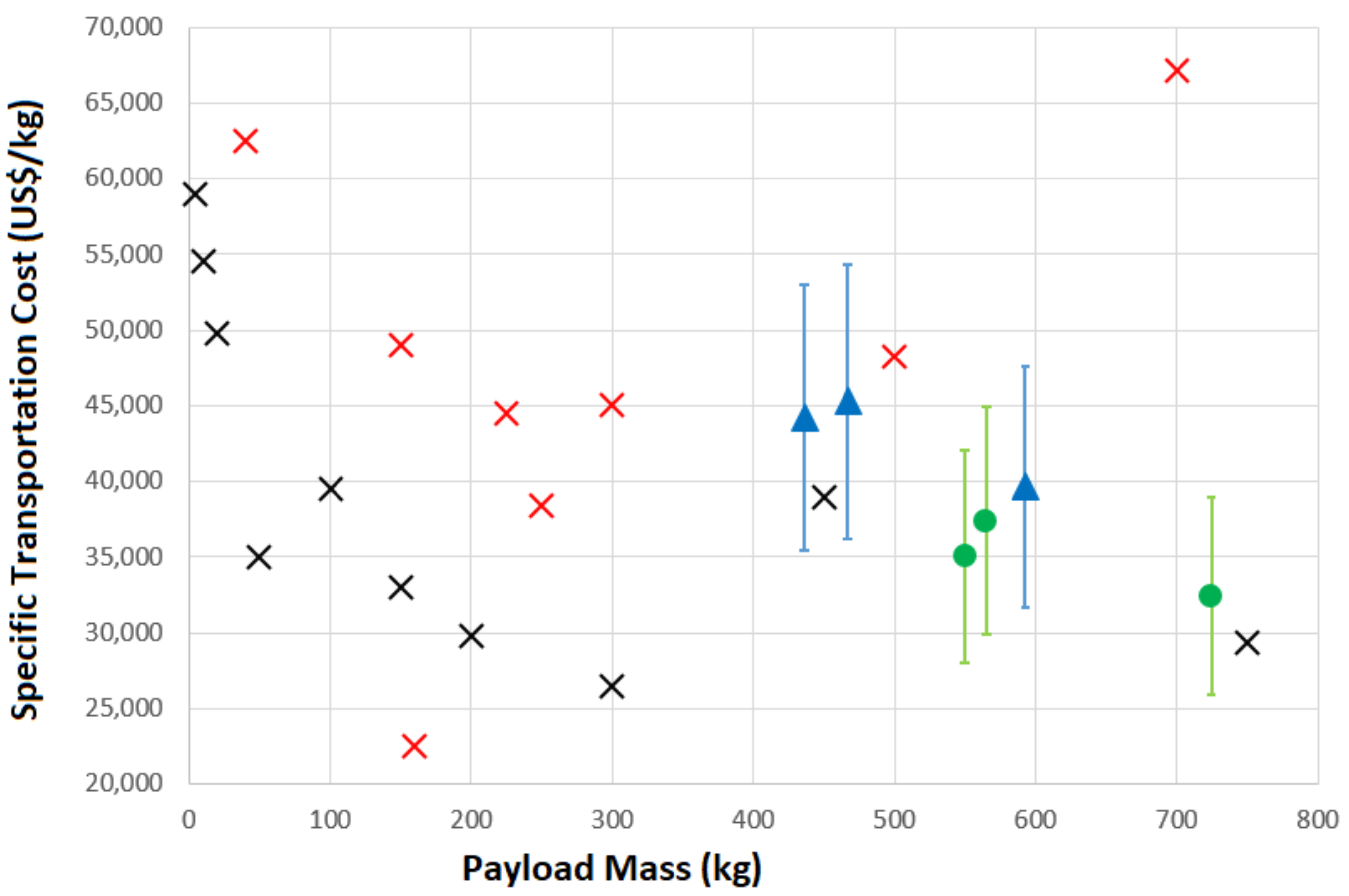
Figure 7 shows a plot of satellite payload masses versus specific transportation costs for launch systems under development as well as in commercial operation [
9] along with those proposed by this work, with a 20% error bar. Additionally, the figure shows plots of the specific charges for a broad range of satellite masses taken from an US company currently offering rideshare launch opportunities [
19].
For payloads weighting 300 kg or less, there is a large variation in specific transportation costs ranging from 22 to 65 thousand dollars per kilogram, for both rideshare and the estimated figures of new projects and some already in commercial phase. Above 400 kg vehicle capacity, the price per kilogram is in the range of 25 to 50 thousands of US dollars, except for the Epsilon launch vehicle from Jaxa which charges 67,000 US
$/kg for LEO missions [
9].
As it can be seen, the proposed configurations (concepts 1, 2 and 3) present larger average payload capacity along with lower specific transportation costs compared to most of the small launchers currently under development (black crosses) and in commercial operation. Also, the price per kilogram of the payload of concept 3 is at the same level of those charged by a launch service provider selling rideshare opportunities [
19]. Concept 3, however, would offer the service, for a 500 kg class satellite, in a dedicated flight for an equivalent price per kilogram thus opening the opportunity for satellite providers to establish their planned constellations [
20,
21].










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}