
Preliminary Nose Landing Gear Digital Twin for Damage Detection

Abstract
:1. Introduction
2. Damage Detection Algorithms
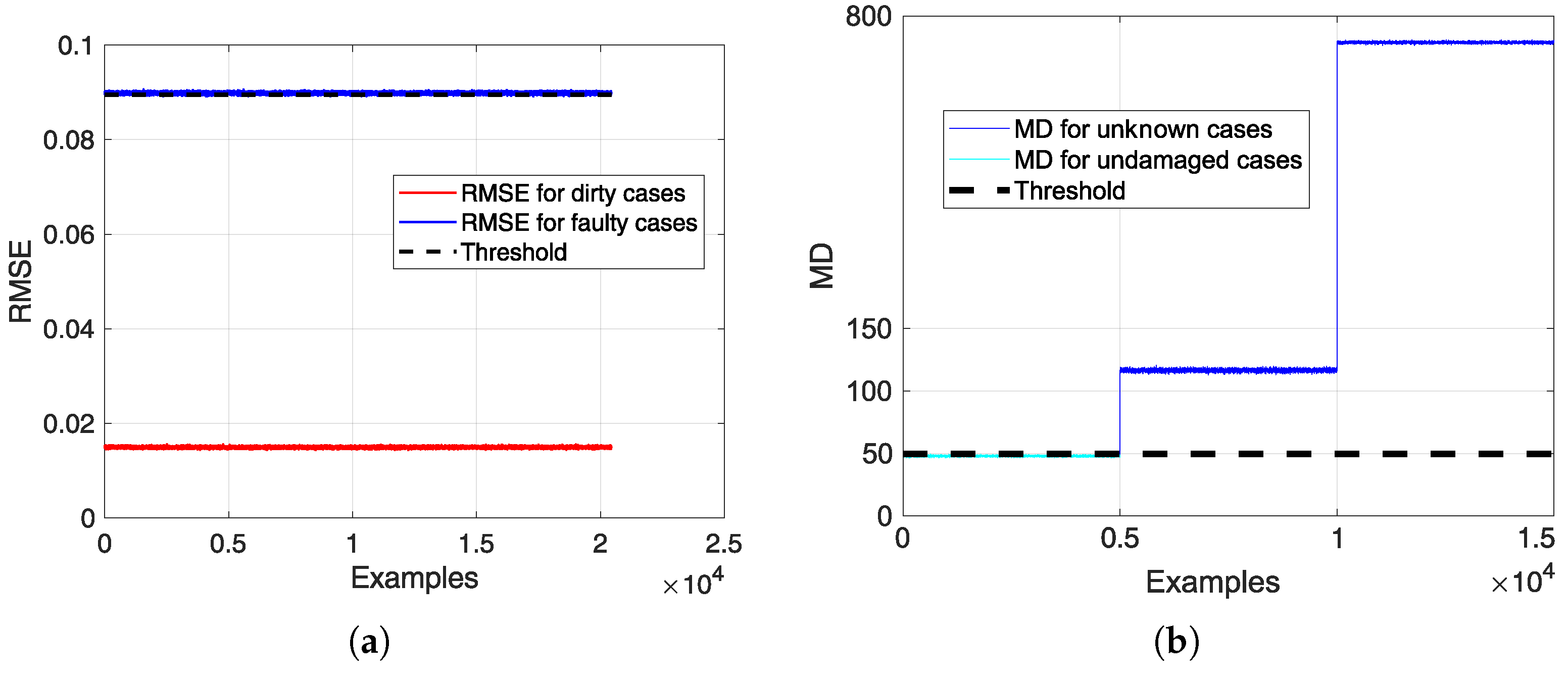
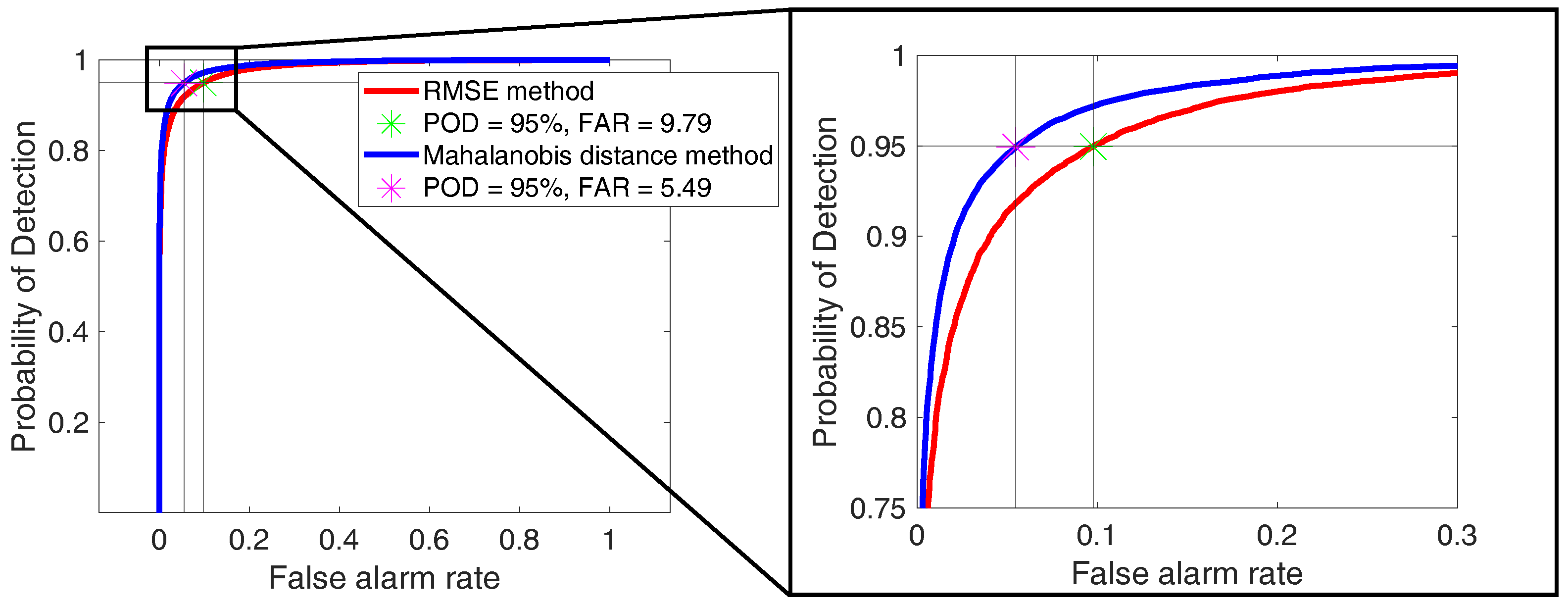
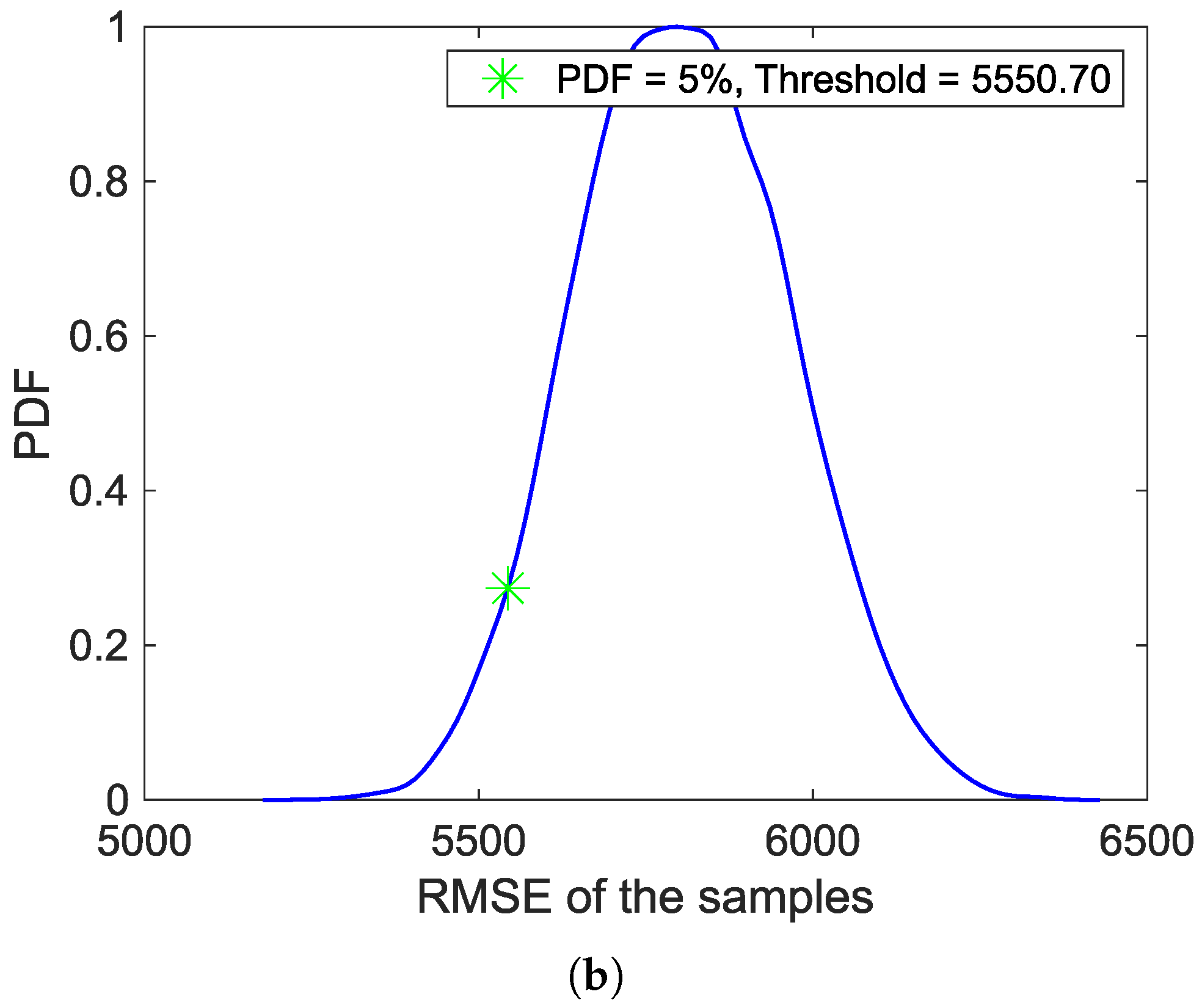
2.1. Diagnostic Algorithm Based on RMSE
- Calculate the RMSE E between the measured signals and the baseline.
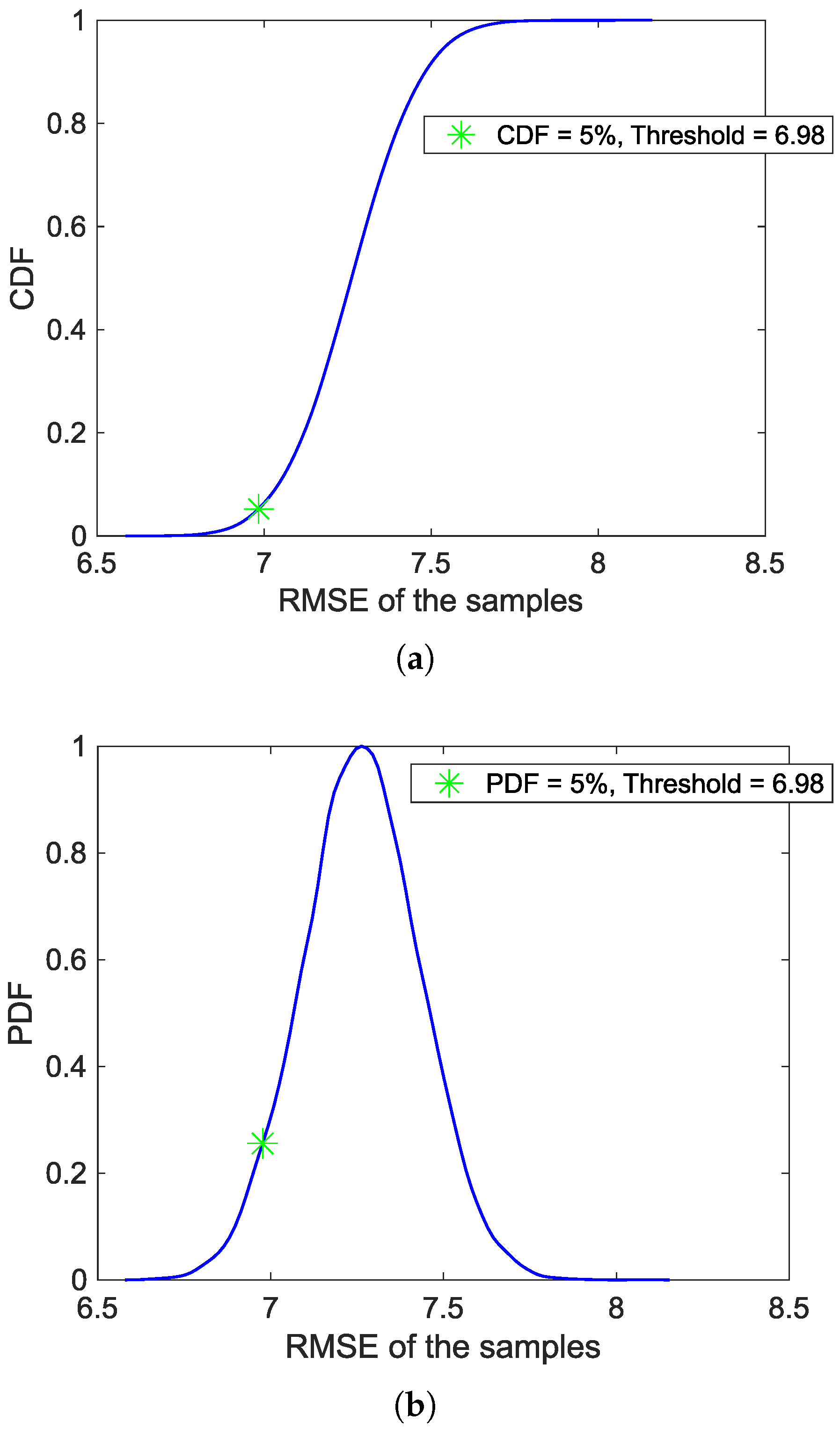
- Define a threshold for E based on the baseline statistics.
- If , the system is declared damaged.
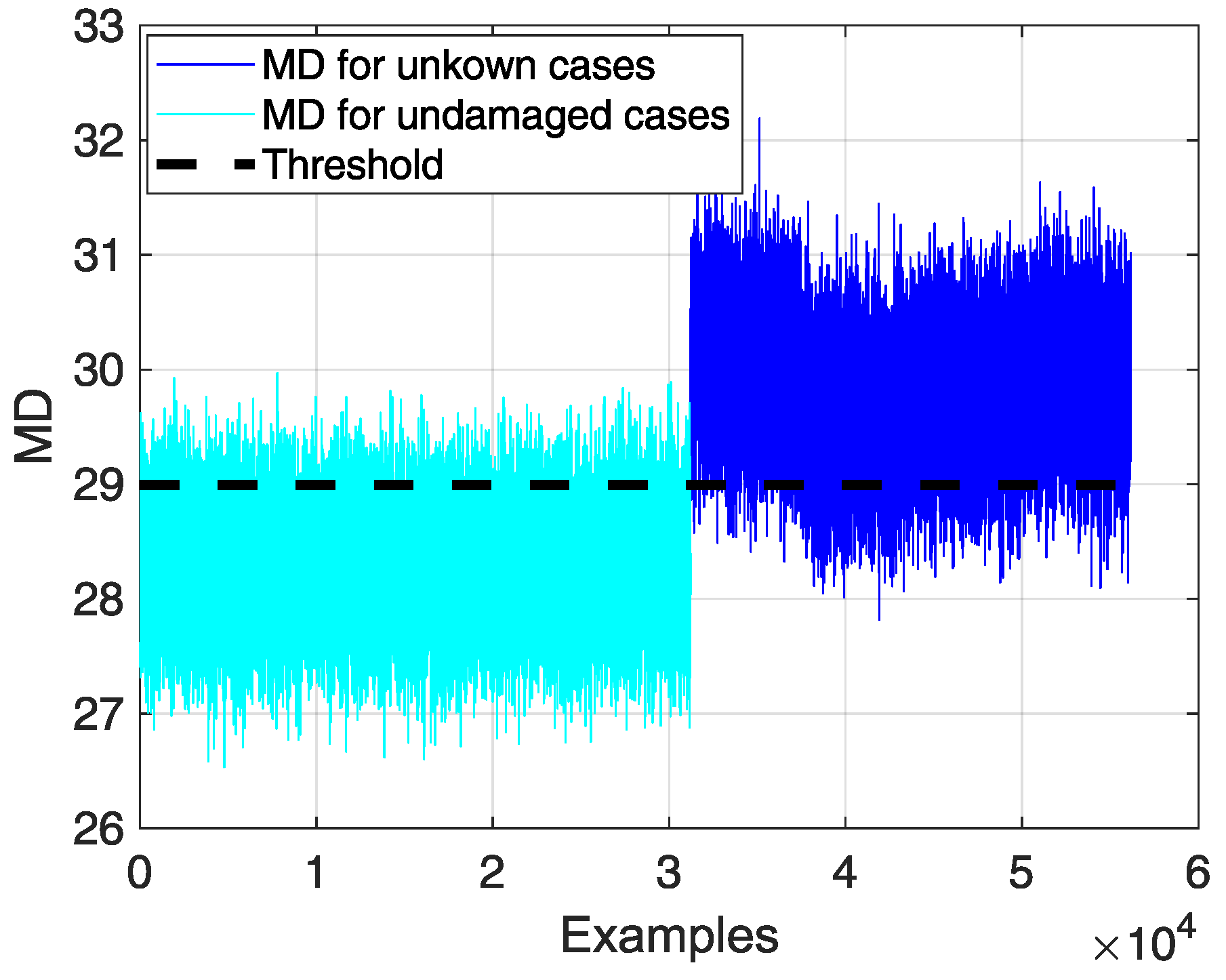
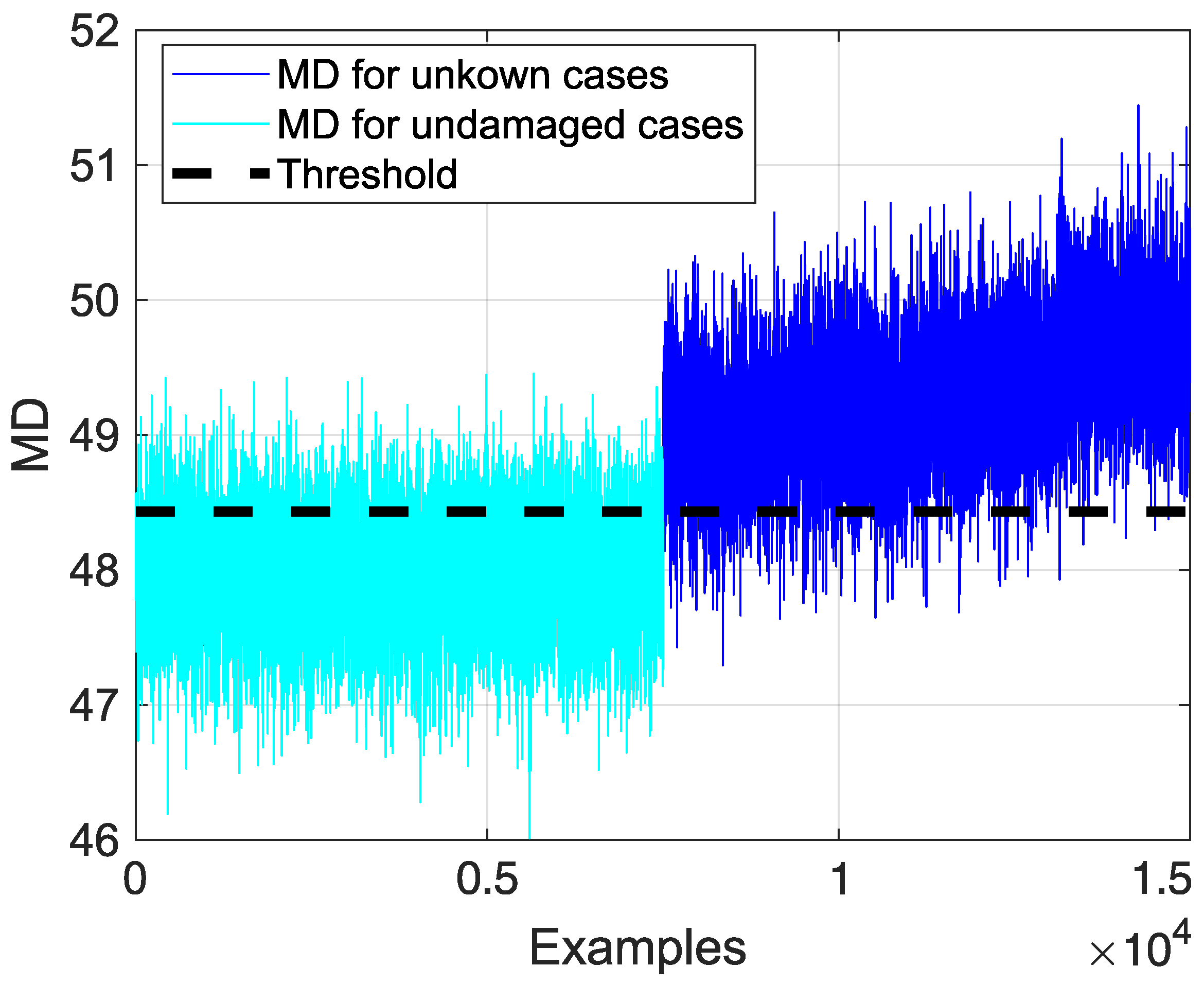
2.2. Diagnostic Algorithm Based on Mahalanobis Distance
- Compute the mean vector and the covariance matrix S for the healthy baseline condition.
- Define a threshold for based on the baseline statistics.
- Compute for the observation , measured at time t.
- If , the system is declared damaged.
3. Nose Landing Gear Digital Twin
3.1. The Oleo-Pneumatic Shock Absorber
3.2. The Steering System
3.3. The Retraction/Extraction System
4. Case Studies and Model Comparative Analysis
- Nose wheel steering system simulation;
- Retraction/extraction system simulation;
- Aircraft landing simulation.
- The current feeding the motor and the torque and angular velocity of the actuator for the steering system.
- The current that feeds the motor, force, and the stroke of the actuator for the retraction/extraction system.
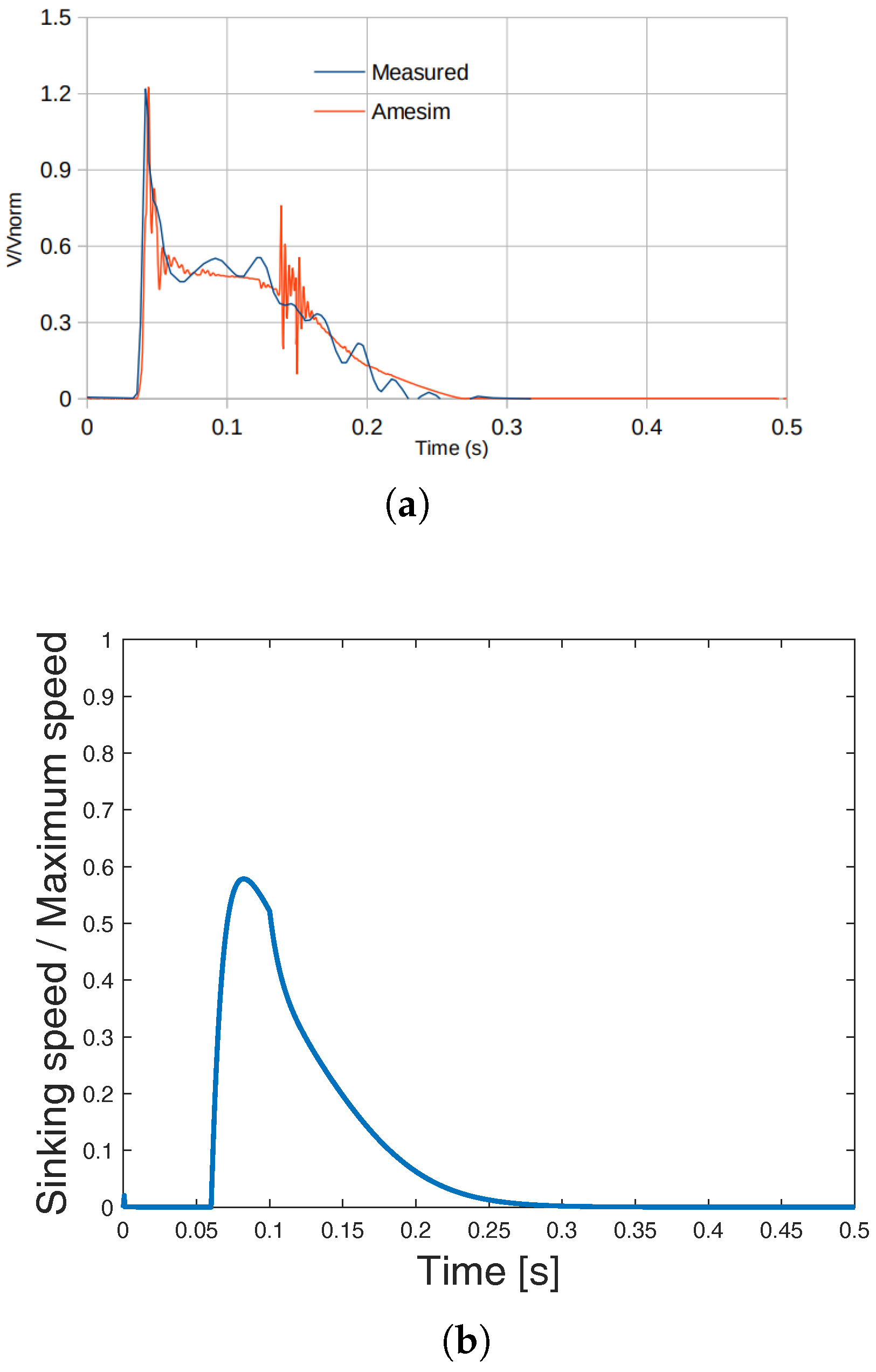
- The pressure of the shock absorber chambers, stroke, and the sinking speed of the shock absorber to land the aircraft.
4.1. The Steering System
4.2. The Retraction/Extraction System
4.3. The Oleo-Pneumatic Shock Absorber
5. Damage Implementation
- Wear (severe damage) and dirt accumulation (mild damage) in the bearings devoted to steering.
- Wear (severe damage) and dirt accumulation (mild damage) in the bearings used for the extraction/retraction movement.
- Leakage of the oil chamber.
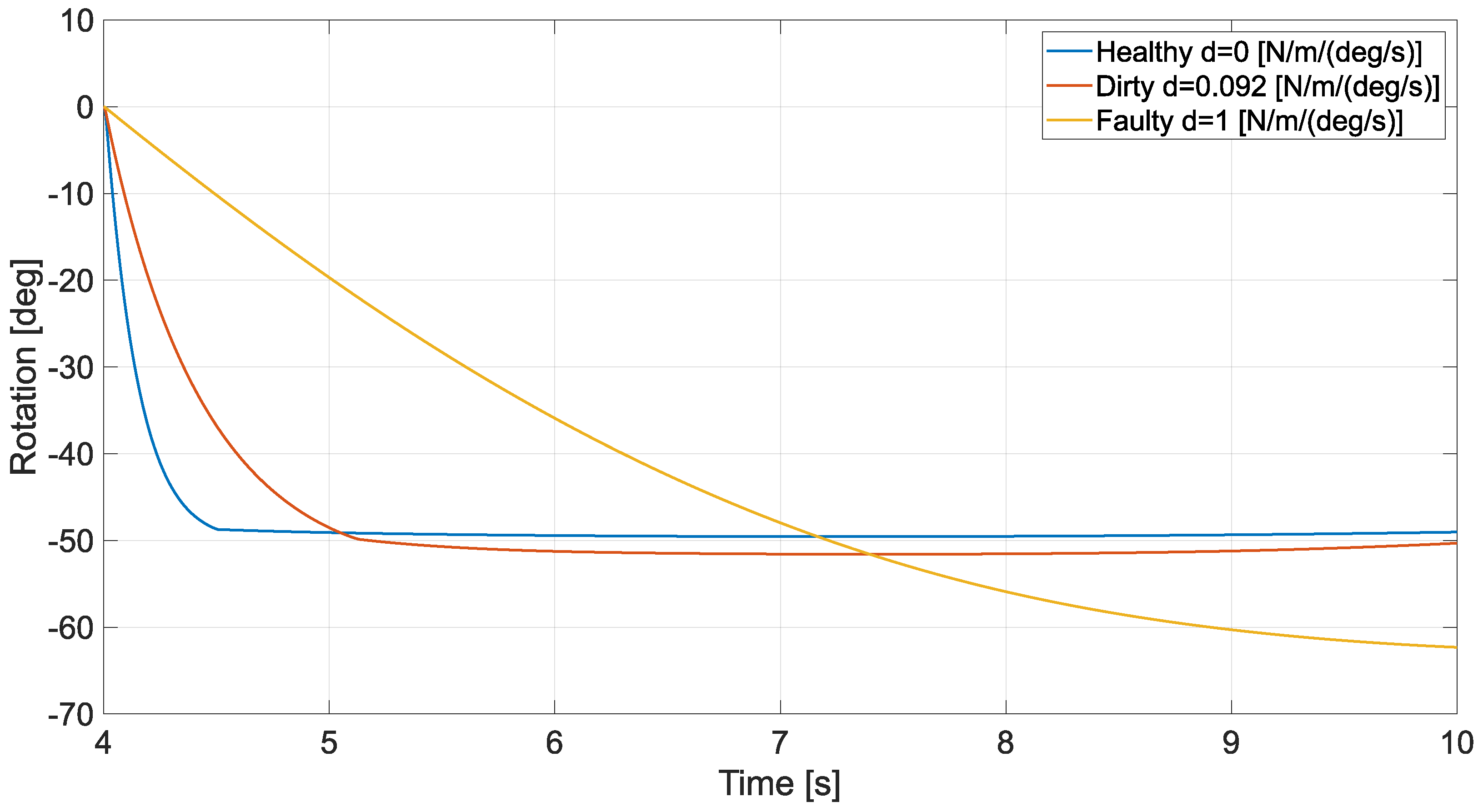
5.1. Bearing Wear
- 0 N/m/(deg/s) in the healthy case.
- 0.092 N/m/(deg/s) in the dirty scenario.
- 1 N/m/(deg/s) in the faulty condition.
5.1.1. The Steering System
5.1.2. The Retraction/Extraction System
5.2. Seal Leakage
5.3. Stress Test
- For the steering system, to test the two methods, damping is set between and N/m/(deg/s) for healthy simulations, while it is set between and N/m/(deg/s) for faulty simulations. Essentially, healthy scenarios include coefficients of (dirty level 1), (dirty level 2), (dirty level 3), and N/m/(deg/s) (dirty level 4), while faulty scenarios have (damage level 1), (damage level 2), (damage level 3), and N/m/(deg/s) (damage level 4) as damping coefficients.
- In the landing gear retraction simulation, dirty scenarios have damping coefficients ranging from to N/m/(deg/s), while faulty simulations have coefficients between and N/m/(deg/s). Healthy scenarios include coefficients of (dirty level 1), (dirty level 2), and N/m/(deg/s) (dirty level 3), while faulty scenarios have (damage level 1), (damage level 2), (damage level 3), and N/m/(deg/s) (damage level 4) as damping coefficients.
- For the shock absorber, the simulations with mild damage have a leakage area within the range of 1 × to × m2, while the simulation parameters of the faulty simulations fall between × and 3 × m2. More specifically, the leakage areas used are × (mild damage level 1), × (mild damage level 2), and × m2 (mild damage level 3), while fault scenarios have × (severe damage level 1), × (severe damage level 2), × (severe damage level 3), and 3 × m2 (severe damage level 4).
6. Results
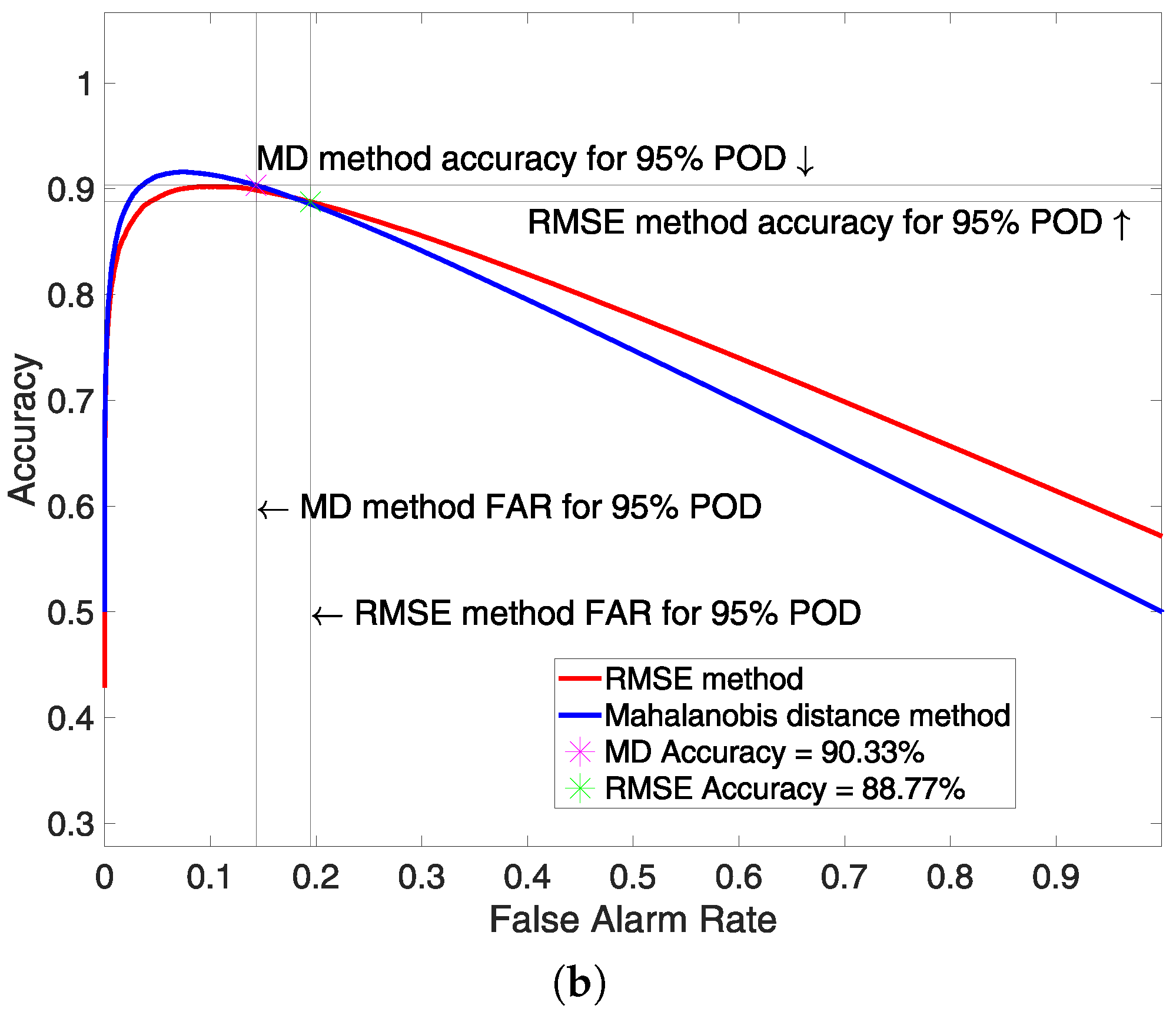
6.1. Diagnostic Algorithms’ Stress Test
6.1.1. The Steering System
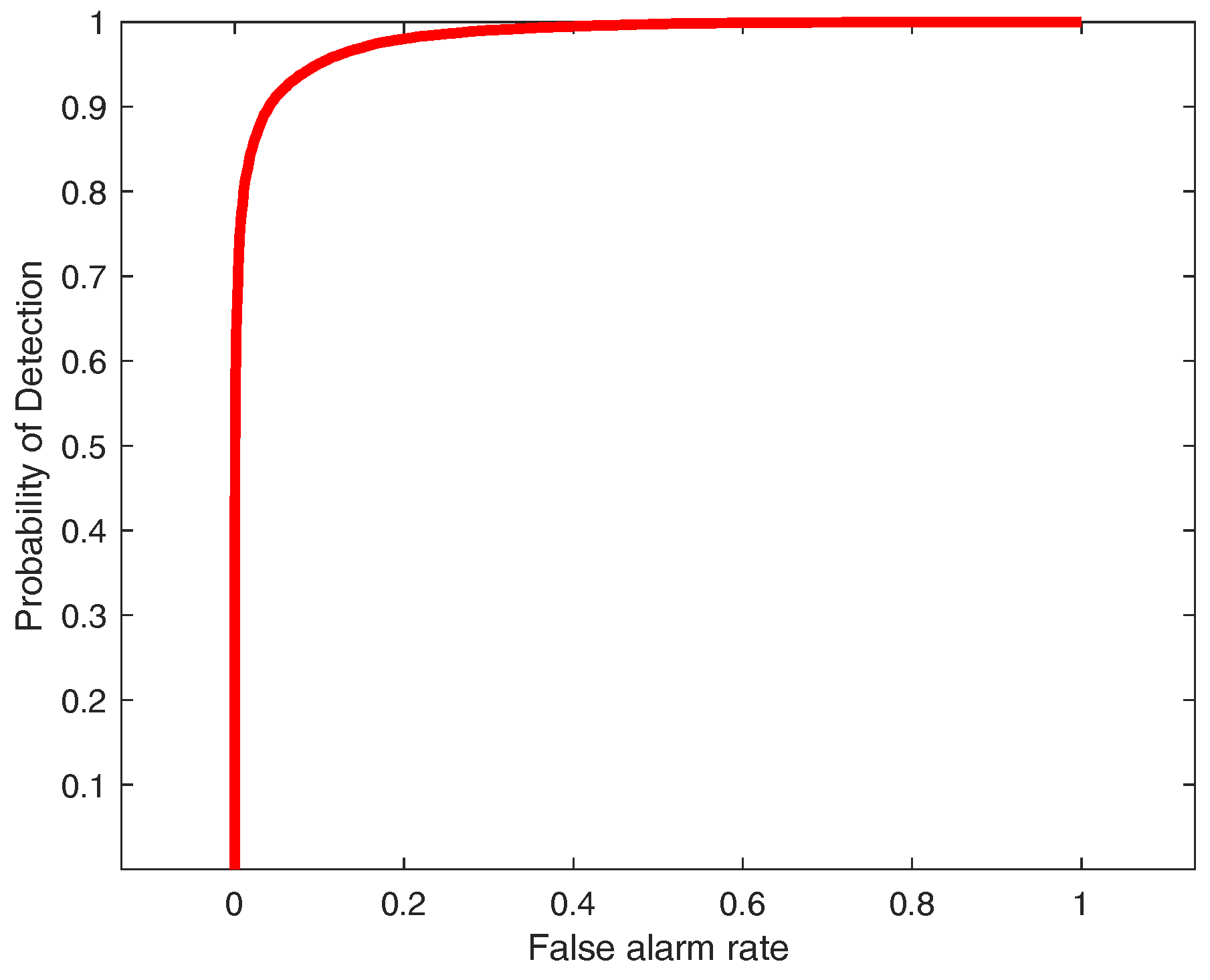
- TP is the number of successful detections.
- TN is the number of times that healthy conditions have not been confused with damaged conditions.
- FP is the number of false alarms.
- FN is the number of missed detections.
6.1.2. The Retraction/Extraction System
6.1.3. The Oleo-Pneumatic Shock Absorber
7. Discussion
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- McLean, V.; Reiman, A.D. Transportation service level impact on aircraft availability. J. Def. Anal. Logist. 2022. [Google Scholar] [CrossRef]
- Budeanu, D.; Bylsma, G.; Cros, G.; Shannon, D.; El Helw, A.; Fernandes, K.; Goulart, A.; Hansen, M.; Harant, J.V.; Il Chan, K.; et al. Aircraft Operational Availability, 2nd ed.; Technical Report; International Air Transport Association: Montreal, QC, Canada, 2022. [Google Scholar]
- Brown Vows New Measures to Boost USAF Readiness. Available online: https://www.airandspaceforces.com/brown-vows-new-measures-to-boost-usaf-readiness/ (accessed on 22 November 2023).
- Mattis, J. Summary of the 2018 National Defense Strategy; Technical Report; U.S. Department of Defense: Washington, DC, USA, 2018.
- Heininen, A. Modelling and Simulation of an Aircraft Main Landing Gear Shock Absorber. Master’s Thesis, Tampereen Teknillinen Yliopisto, Tampere, Finland, 2015. [Google Scholar]
- Pinello, L.; Brancato, L.; Giglio, M.; Cadini, F.; De Luca, G.F. Enhancing Planetary Exploration through Digital Twins: A Tool for Virtual Prototyping and HUMS Design. Aerospace 2024, 11, 73. [Google Scholar] [CrossRef]
- Chiariello, A.; Orlando, S.; Vitale, P.; Linari, M.; Longobardi, R.; Di Palma, L. Development of a Morphing Landing Gear Composite Door for High Speed Compound Rotorcraft. Aerospace 2020, 7, 88. [Google Scholar] [CrossRef]
- Shmidt, R.K. Monitoring of Aircraft Landing Gear Structure; Royal Aeronautical Society: Hong Kong, China, 2008. [Google Scholar] [CrossRef]
- Forrest, C.; Forrest, C.; Wiser, D. Landing Gear Structural Health Monitoring (SHM). Procedia Struct. Integr. 2017, 5, 1153–1159. [Google Scholar] [CrossRef]
- Viscardi, M.; Arena, M.; Napolitano, P.; Iaccarino, P.; Cerreta, P. Complex composite technology investigation: Simulations and experimental results. In Journal of Physics: Conference Series; IOP Publishing: Bristol, UK, 2020. [Google Scholar] [CrossRef]
- Viscardi, M.; Arena, M.; Iaccarino, P.; Insderra Imparato, S. Manufacturing and Validation of a Novel Composite Component for Aircraft Main Landing Gear Bay. J. Mater. Eng. Perform. 2019, 28, 3292–3300. [Google Scholar] [CrossRef]
- Viscardi, M.; Arenza, M.; Ciminiello, M.; Guida, M.; Cerreta, P. Experimental technologies comparison for strain measurements of a composite main landing gear bay specimen. In Nondestructive Characterization and Monitoring of Advanced Materials, Aerospace, Civil Infrastructure, and Transportation XII; SPIE: Bellingham, WA, USA, 2018. [Google Scholar] [CrossRef]
- Mae, A.M. Cheat Sheet: What Is Digital Twin? Available online: https://www.ibm.com/blog/iot-cheat-sheet-digital-twin/ (accessed on 22 November 2023).
- Worden, K.; Manson, G.; Fieller, N. Damage Detection Using Outlier Analysis. J. Sound Vib. 2000, 229, 647–667. [Google Scholar] [CrossRef]
- Yeager, M.; Gregory, B.; Key, C.; Todd, M. On using robust Mahalanobis distance estimations for feature discrimination in a damage detection scenario. Struct. Health Monit. 2019, 18, 245–253. [Google Scholar] [CrossRef]
- Dervilis, N.; Cross, E.; Barthorpe, R.; Worden, K. Robust methods of inclusive outlier analysis for structural health monitoring. J. Sound Vib. 2014, 333, 5181–5195. [Google Scholar] [CrossRef]
- Bull, L.; Worden, K.; Fuentes, R.; Manson, G.; Cross, E.; Dervilis, N. Outlier ensembles: A robust method for damage detection and unsupervised feature extraction from high-dimensional data. J. Sound Vib. 2019, 453, 126–150. [Google Scholar] [CrossRef]
- Classification: ROC Curve and AUC. Available online: https://developers.google.com/machine-learning/crash-course/classification/roc-and-auc (accessed on 22 November 2023).
- Farrar, C.R.; Worden, K. Structural Health Monitoring: A Machine Learning Perspective; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2013. [Google Scholar]
- De Maesschalck, R.; Jouan-Rimbaud, D.; Massart, D. The Mahalanobis distance. Chemom. Intell. Lab. Syst. 2000, 50, 1–8. [Google Scholar] [CrossRef]
- Chen, C.; Wang, Y.; Wang, T.; Yang, X. A Mahalanobis Distance Cumulant-Based Structural Damage Identification Method with IMFs and Fitting Residual of SHM Measurements. Math. Probl. Eng. 2020, 2020, 6932463. [Google Scholar] [CrossRef]
- Daga, A.P.; Fasana, A.; Marchesiello, S.; Garibaldi, L. The Politecnico di Torino rolling bearing test rig: Description and analysis of open access data. Mech. Syst. Signal Process. 2019, 120, 252–273. [Google Scholar] [CrossRef]
- Figueiredo, E.; Park, G.; Farrar, C.R.; Worden, K.; Figueiras, J. Machine learning algorithms for damage detection under operational and environmental variability. Struct. Health Monit. 2011, 10, 559–572. [Google Scholar] [CrossRef]
- Gul, M.; Necati Catbas, F. Statistical pattern recognition for Structural Health Monitoring using time series modeling: Theory and experimental verifications. Mech. Syst. Signal Process. 2009, 23, 2192–2204. [Google Scholar] [CrossRef]
- Figueiredo, E.; Radu, L.; Worden, K.; Farrar, C.R. A Bayesian approach based on a Markov-chain Monte Carlo method for damage detection under unknown sources of variability. Eng. Struct. 2014, 80, 1–10. [Google Scholar] [CrossRef]
- Bao, C.; Hao, H.; Li, Z. Vibration-based structural health monitoring of offshore pipelines: Numerical and experimental study. Struct. Control Health Monit. 2013, 20, 769–788. [Google Scholar] [CrossRef]
- Entezami, A.; Shariatmadar, H.; Mariani, S. Early damage assessment in large-scale structures by innovative statistical pattern recognition methods based on time series modeling and novelty detection. Adv. Eng. Softw. 2020, 150, 102923. [Google Scholar] [CrossRef]
- Manring, N.D.; Fales, R.C. Hydraulic Control Systems; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2005. [Google Scholar]
- Universal and Individual Gas Constants. Available online: https://www.engineeringtoolbox.com/individual-universal-gas-constant-d_588.html (accessed on 22 November 2023).
- Hydraulic Fluid. Available online: https://it.mathworks.com/help/hydro/ref/hydraulicfluid.html (accessed on 22 November 2023).
- Heininen, A.; Aaltonen, J.; Koskinen, K.; Huitula, J. Equations of State in Fighter Aircraft Oleo-Pneumatic Shock Absorber Modelling; Tampere University: Tampere, Finland, 2019; pp. 64–70. [Google Scholar] [CrossRef]
- Dixon, J.C. The Shock Absorber Handbook, 2nd ed.; John Wiley and Sons, Ltd.: Hoboken, NJ, USA, 2007. [Google Scholar]
- Armstrong, B.; de Wit, C. Friction Modeling and Compensation, The Control Handbook; CRC Press: Boca Raton, FL, USA, 1995. [Google Scholar]
- Li, K. Developing More Electric Aircraft Technologies. Int. Aviat. 2009, 1, 73–75. [Google Scholar]
- Mathworks. Motor & Drive (System Level)-Simscape Library Documentation. 2023. Available online: https://uk.mathworks.com/help/sps/ref/motordrivesystemlevel.html (accessed on 22 November 2023).
- Skorupka, Z.; Kowalski, W.; Kajka, R. Electrically Driven and Controlled Landing Gear for UAV up to 100 kg of Take off Mass. In Proceedings of the 24th European Conference on Modelling and Simulation, Kuala Lumpur, Malaysia, 1–4 June 2010; pp. 1–5. [Google Scholar]
- Components of an Electric Linear Actuator. Available online: https://www.progressiveautomations.com/blogs/products/inside-an-electric-linear-actuator (accessed on 22 November 2023).
- Shams, T.A.; Shah, S.I.A.; Ahmad, M.A.; Mehmood, K.; Ahmad, W.; Rizvi, S.T.u.I. Selection Methodology of an Electric Actuator for Nose Landing Gear of a Light Weight Aircraft. Appl. Sci. 2020, 10, 8730. [Google Scholar] [CrossRef]
- Na, K.m.; Hwang, K.L. Airworthiness Certification of Unmanned Aerial System; Technical Report; Defense Acquisition Program Administration-European Defense Agency: Brussels, Belgium, 2017; Available online: https://eda.europa.eu/docs/default-source/events/mac2017/3-7_certification-of-unmanned-aerial-system—rok.pdf (accessed on 22 November 2023).
- Van Damme, J.; Vansompel, H.; Crevecoeur, G. Stall Torque Performance Analysis of a YASA Axial Flux Permanent Magnet Synchronous Machine. Machines 2023, 11, 487. [Google Scholar] [CrossRef]
- Kerr, T.; Barrett, S. Motor Control and Actuators. In Arduino IV: DIY Robots: 3D Printing, Instrumentation, and Control; Springer International Publishing: Cham, Switzerland, 2022; pp. 161–188. [Google Scholar] [CrossRef]
- Fracasso, D. Digital-Twin for Health Monitoring of an Aircraft’s Elevon; Milan Institute of Technology: Milan, Italy, 2022. [Google Scholar]
- Miller, S. Predictive Maintenance in a Hydraulic Pump. 2023. Available online: https://www.mathworks.com/matlabcentral/fileexchange/65605-predictive-maintenance-in-a-hydraulic-pump (accessed on 22 November 2023).

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Torque | Angular Velocity | |
|---|---|---|
| 3.9 | 1.1 |
| Force | Actuator Stroke | |
|---|---|---|
| 2.3 | 1.03 |
| Sinking Velocity | Shock Absorber Stroke | |
|---|---|---|
| 1.96 | 2.3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pinello, L.; Hassan, O.; Giglio, M.; Sbarufatti, C. Preliminary Nose Landing Gear Digital Twin for Damage Detection. Aerospace 2024, 11, 222. https://doi.org/10.3390/aerospace11030222
Pinello L, Hassan O, Giglio M, Sbarufatti C. Preliminary Nose Landing Gear Digital Twin for Damage Detection. Aerospace. 2024; 11(3):222. https://doi.org/10.3390/aerospace11030222
Chicago/Turabian StylePinello, Lucio, Omar Hassan, Marco Giglio, and Claudio Sbarufatti. 2024. "Preliminary Nose Landing Gear Digital Twin for Damage Detection" Aerospace 11, no. 3: 222. https://doi.org/10.3390/aerospace11030222