1. Introduction
In the early era of space exploration, satellite navigation relied on ground tracking stations. The available measurements from ground stations include the ranges, bearings, and radio signal Doppler frequency shifts of the satellite with respect to the ground station. A representative historical system is the
Minitrack system introduced in the late 1950s, which provided angle observations and was used to track Vanguard satellites [
1]. Ground-based satellite navigation has the merits of high precision and high reliability and still plays an irreplaceable role in modern space missions.
With the rapid development of space technology, the number of artificial Earth satellites has increased explosively. To date, more than 10,680 satellites have been launched by humankind, and about 6250 satellites are now operating in orbit [
2]. The large number of satellites in orbit has introduced a great burden to ground facilities. In addition, ground-based satellite navigation usually cannot be done in real time, as a ground facility cannot track a satellite on the opposite side of the Earth. The Global Positioning System (GPS) is currently the most popular autonomous satellite navigation method. GPS relies on geometric measurements of the relative distance and direction via the use of electromagnetic waves and can provide real-time and centimeter-level navigation results for low Earth orbit (LEO) satellites [
3,
4]. However, the electromagnetic wave signals of GPS can be easily jammed or spoofed [
5].
In recent years, autonomous satellite navigation in GPS-denied environments has received increasing interest. A representative example is the optical measurement-based autonomous navigation method, as optical signals could not be easily interfered with. A series of autonomous navigation methods based on optical measurements have been proposed, including celestial navigation [
6,
7,
8], optical navigation with landmarks [
9,
10,
11], and inter-satellite link-based navigation [
12,
13]. The celestial navigation system plays a significant role in optical navigation. Positioning accuracy ranging from tens of meters to a hundred meters can be achieved for LEO satellites via the indirect measurement of stellar refraction. [
6,
8]. Landmark-based optical navigation methods have also become widely applied to soft landings on planets [
10]. Using images of the morphological features or landmarks on the surface of a planet, position and attitude accuracies of 25 m and 0.42 deg, respectively, can be realized. In 2018, Hayabusa2 performed two landing operations successfully using artificial-landmark-based autonomous optical navigation [
13]. Work on inter-satellite link-based navigation was first conducted by Markley and Psiaki, who proposed an orbit determination method based on inter-satellite relative position measurements between two satellites [
12]. The relative position measurement contains both the range and the LoS information, which are provided by a laser range finder and an optical sensor, respectively. Apart from the above applications, optical measurements have also been adopted for the surveillance of geosynchronous Earth orbit (GEO) objects. It has been demonstrated that optical measurements from the optical sensors onboard a LEO satellite platform offer great benefits for observing GEO objects [
14,
15].
Based on optical measurements, Hu et al. proposed a new navigation system for LEO satellites using cooperative GEO satellites [
16]. Position accuracies of 50 meters were obtained under the condition that the attitude of the LEO satellites was known. This navigation system improved the autonomy of LEO satellites and reduced their dependence on ground facilities. However, in his work, the orientation of the optical sensor had to move along GEO satellites, which necessitated high requirements for the servo-tracking capabilities of the sensors. In addition, a priori attitude information was required to obtain angle measurements in the inertial frame. The present study extends Hu’s work and eliminates the requirements of strict attitude control and a priori attitude information.
This paper is mainly a proof-of-concept study of a cooperative constellation navigation system (CCNS). The main contribution of this paper is as follows. First, a cooperative constellation navigation system is proposed. Owing to the cooperative constellation, the star tracking mode is adopted to replace the target tracking mode and does not require attitude servos for the sensor. Second, an optical transmission link model for the CCNS is built, and the feasibility of the CCNS is verified. Third, a positioning method based on the LoS vectors’ inner products is given. Pixel information is introduced as a measurement in this method instead of right ascension and declination. The proposed positioning method functions independently from a priori attitude information. Finally, the feasibility and performance of the CCNS are demonstrated via simulations.
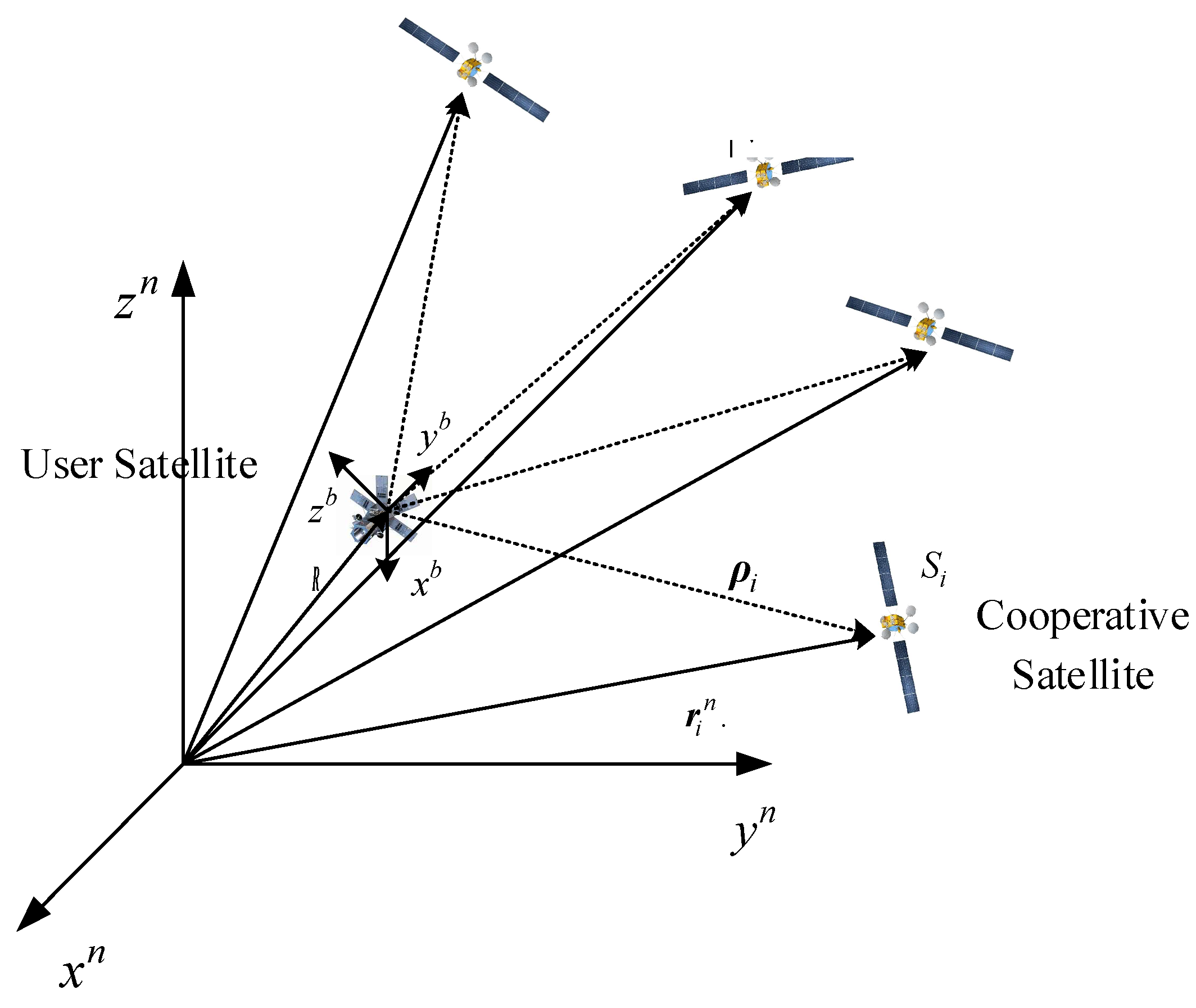
In this paper, a new navigation method for LEO satellites based on optical measurements of a cooperative constellation is proposed. It is assumed that a cooperative medium Earth orbit (MEO) satellite constellation similar to a GPS constellation is constructed. Cooperative satellites carry optical sources, which actively emit modulated and coded light signals. With the optical sensor onboard the LEO satellite, a light signal can be detected. The information on the cooperative satellite, including ephemeris, light signal emission time, and pixel coordinates of cooperative satellites on the optical images, can be extracted. The pixel coordinate observations are transferred to equivalent LoS vectors, and a single-point positioning method with the LoS vectors’ inner product is developed to directly solve the position of the LEO satellite. Then, iterated least square (ILS) batch filtering with single-point positioning results as inputs is used for precise orbit determination (OD). Finally, a variety of simulations is conducted to analyze the effects of several important factors on navigation accuracy.
The remainder of this paper is organized as follows.
Section 2 briefly introduces the segments and working principles of the cooperative constellation navigation system (CCNS).
Section 3 analyzes the optical transmission link.
Section 4 presents the orbital dynamic model, the optical observation model, and the linearized perturbation model of the LoS vectors’ inner product.
Section 5 provides a detailed navigation algorithm, which consists of two parts: the single-point positioning with the LoS vectors’ inner product and the precise orbit determination with the iterated least square method. In
Section 6, simulations are developed to demonstrate the feasibility and performance of the CCNS. The conclusions of this study are presented in
Section 7.
2. Basic Concepts of Cooperative Constellation Navigation System
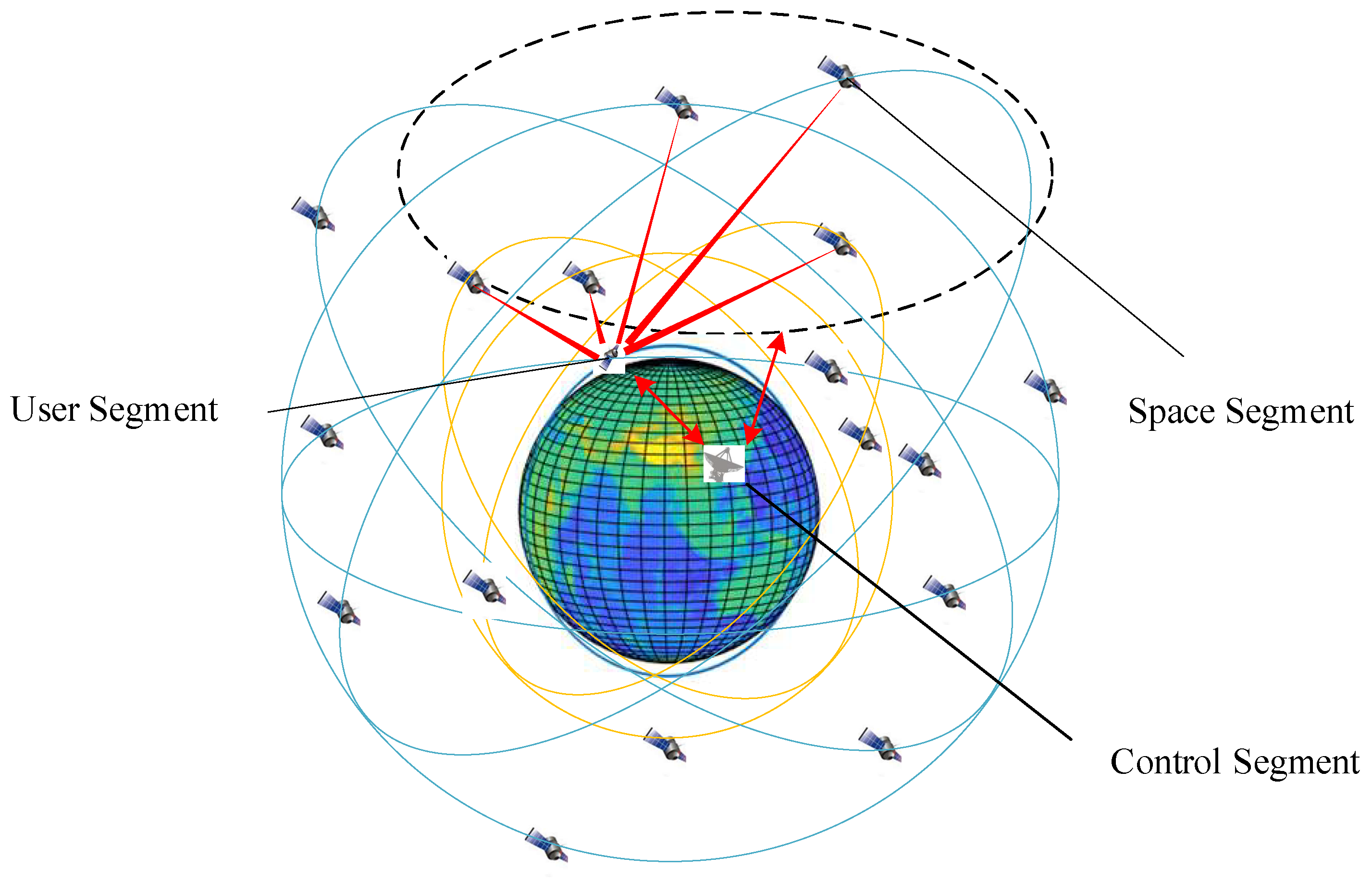
As shown in
Figure 1, the CCNS consists of three segments: the space segment, the user segment, and the control segment. The functions of each segment are as follows.
2.1. Space Segment
The cooperative constellation is similar to that of GPS and consists of 54 cooperative satellites, which move along nearly circular orbits deployed in six evenly spaced planes. Each orbital plane has an inclination of 55° and 12 satellites per plane [
17]. Every cooperative satellite is equipped with light sources that can emit a modulated and encoded light signal. The light signal contains the required information for cooperative satellites, including the satellite identification number, ephemeris, light signal emit time, etc. In addition, the cooperative satellites receive uplinked commands and upload them from the control segment, crosslink commands and upload them within the space segment, and downlink optical information to the user segment [
18].
2.2. User Segment
The user segment is comprised of satellites in low earth orbits, which are equipped with optical sensors. The user segment’s interaction with the CCNS is achieved through the active optical detection of optical sources mounted on cooperative satellites, which derive optical measurements. Optical sensors adopt the star tracking mode as the observation mode. The aim of using this mode is to observe cooperative satellites as much as possible. The observed cooperative satellites pass through the field of view (FOV) of the optical sensors.
2.3. Control Segment
The operational control segment consists of a master control station, monitoring stations, and ground antennas. The main operational tasks of the operational control segment are as follows: tracking the cooperative satellites for the orbit, clock determination, and prediction, and uploading the precise ephemeris of the cooperative satellites to the user segment.
The principle of the CCNS is as follows. With support from the control segment, the ephemeris of cooperative satellites can be obtained and sent to the user segment. In the navigation process, the user satellite’s camera continuously takes photographs of the sky and detects cooperative satellites. From consecutive images, the detected cooperative satellite identification number and corresponding pixel coordinates can be extracted. Then, with pixel coordinates and ephemeris information, the real-time position of the user satellite can be estimated via the single-point positioning algorithm. Finally, the batch least square method is adopted to solve the dynamic orbit determination problem, thereby realizing high-precision spacecraft navigation.
The main acronyms used in this paper are summarized in
Table 1 for quick reference.
6. Simulation and Results
In this study, numerical simulations are conducted to verify the feasibility and performance of the proposed cooperative constellation navigation system. In addition, several factors that could influence the performance of the navigation system are examined, including the noise levels of measurements, critical parameters of cooperative constellations, cooperative satellite ephemeris errors, and the truncated degree and order of the Earth’s gravitational model in the ILS process.
6.1. Optical Link Budget
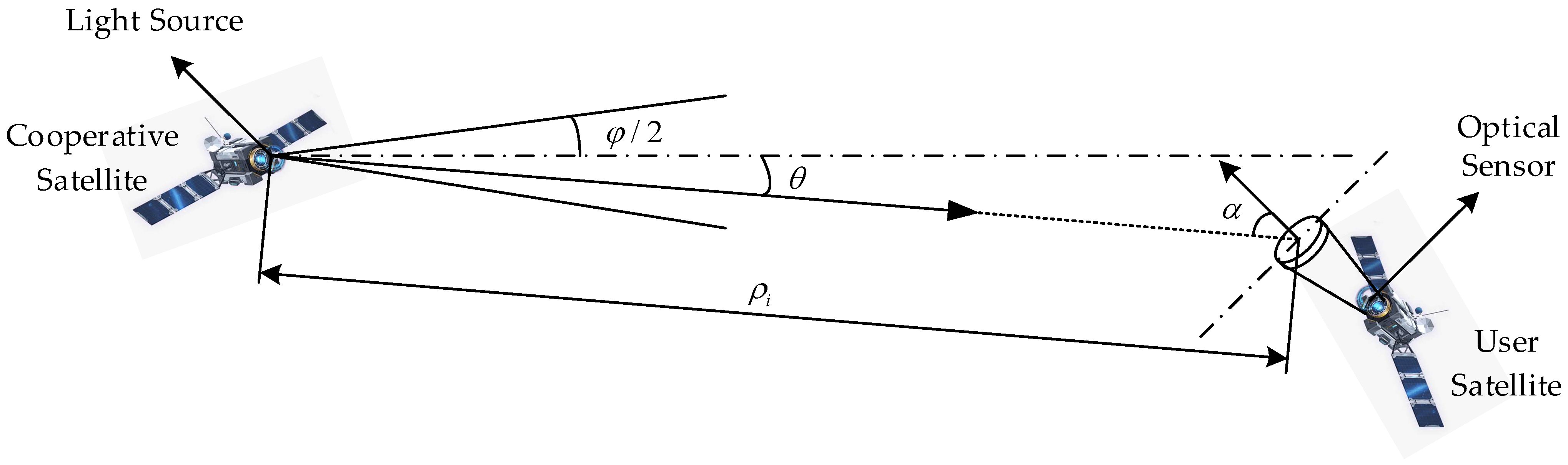
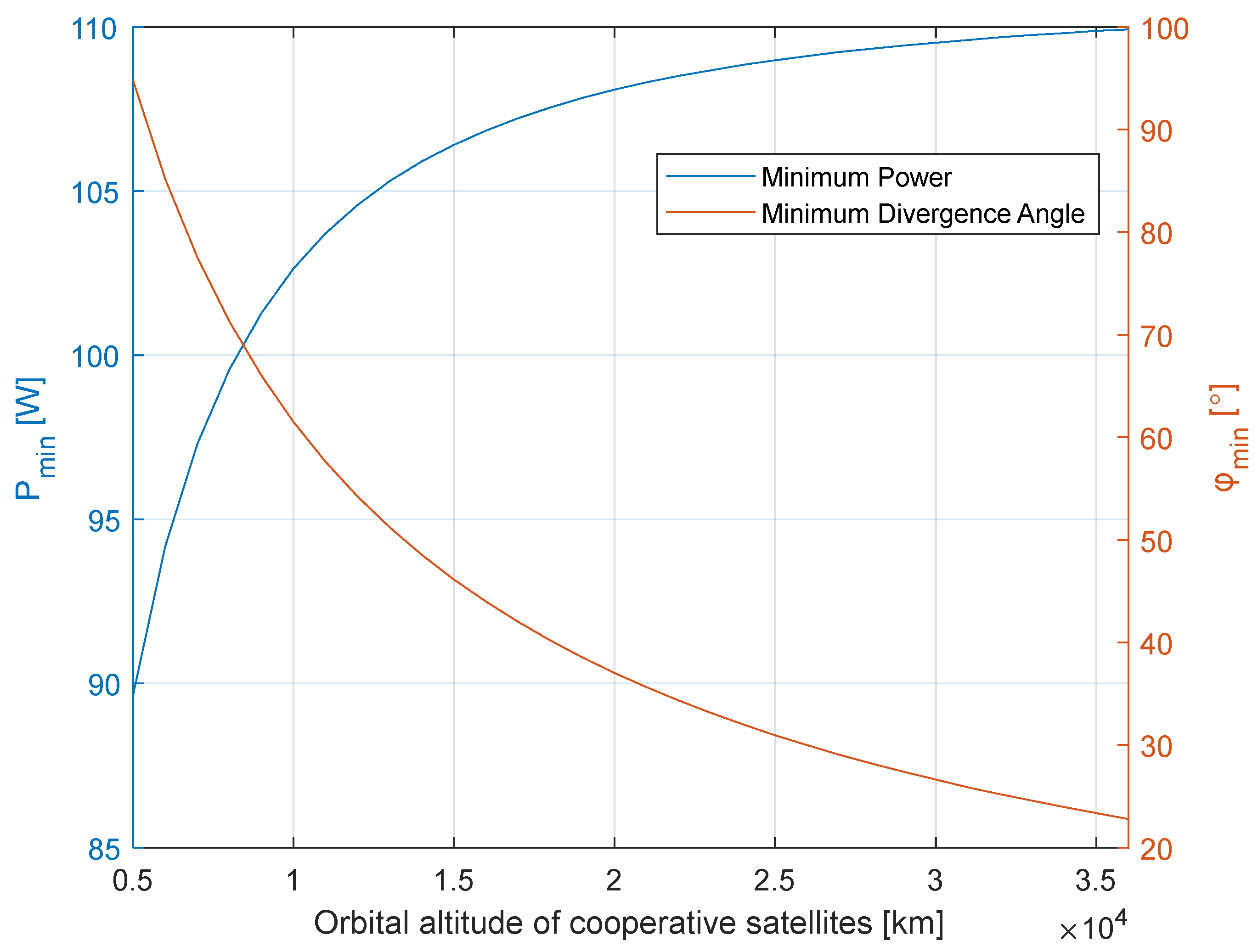
In order to verify the feasibility of the CCNS, it is necessary to calculate the power demand and divergence angle of the light source onboard cooperative satellites at different orbital altitudes. An optical sensor array with a wide FOV is used in the CCNS.
Table 2 shows the parameters of the optical sensor onboard the LEO satellite. In addition, in order to test the power demand in extreme cases, the radiation angle
is set to
, the incident angle
is set to 15°, and the SNR is set to 5. The orbital altitude of the cooperative constellations varies from 5000 to 36000 km.
Figure 5 shows the minimum values of the divergence angle with the optical signal constraints in Equation (2) and the minimum power of the light source with SNR constraints in Equation (13) given different orbital altitudes of cooperative satellites. As expected, the light source of the smaller divergence angle is required with an increase in the orbital altitude of cooperative satellites, which reduces signal energy divergence. However, an increase in the orbital altitude of cooperative satellites produces more signal energy diffusion. Under the combined effects, the light source power demand varies little with the orbital altitude. For a cooperative satellite with an orbital altitude of 36,000 km, the power demand of the light source reaches 110 w, and the divergence angle is about 23°. For a cooperative satellite with an orbital altitude of 5000 km, the power demand of the light source reaches 89 w, and the divergence angle is about 108°.
6.2. Navigation Simulation Scenario
In order to verify the performance of the CCNS, the LEO satellite is assumed to move along a nearly circular orbit with a 500 km height, and the Walker constellation is selected as the cooperative satellite constellation. In this simulation scenario, the total number of satellites of the cooperative constellation is 54, the number of orbital planes is 6, and the configuration number is set to 1.
Table 3 shows the specific parameters of the simulation scenario. The true orbit trajectories are generated using a high-precision numerical orbit simulator. In the simulator, we use Earth’s gravitational model (2008) truncated at degree 70 and order 70 for gravitational acceleration, the NRLMSISE-00 model for atmospheric density, and the analytical formulas for lunar and solar ephemerides. The simulation covers a 2 h data arc starting from February 21, 2022, at 00:00:00.0 (UTC). Moreover, in order to examine the performance in a probabilistic manner, a 500 run Monte Carlo simulation is performed for each single-point positioning process.
6.3. Baseline Case
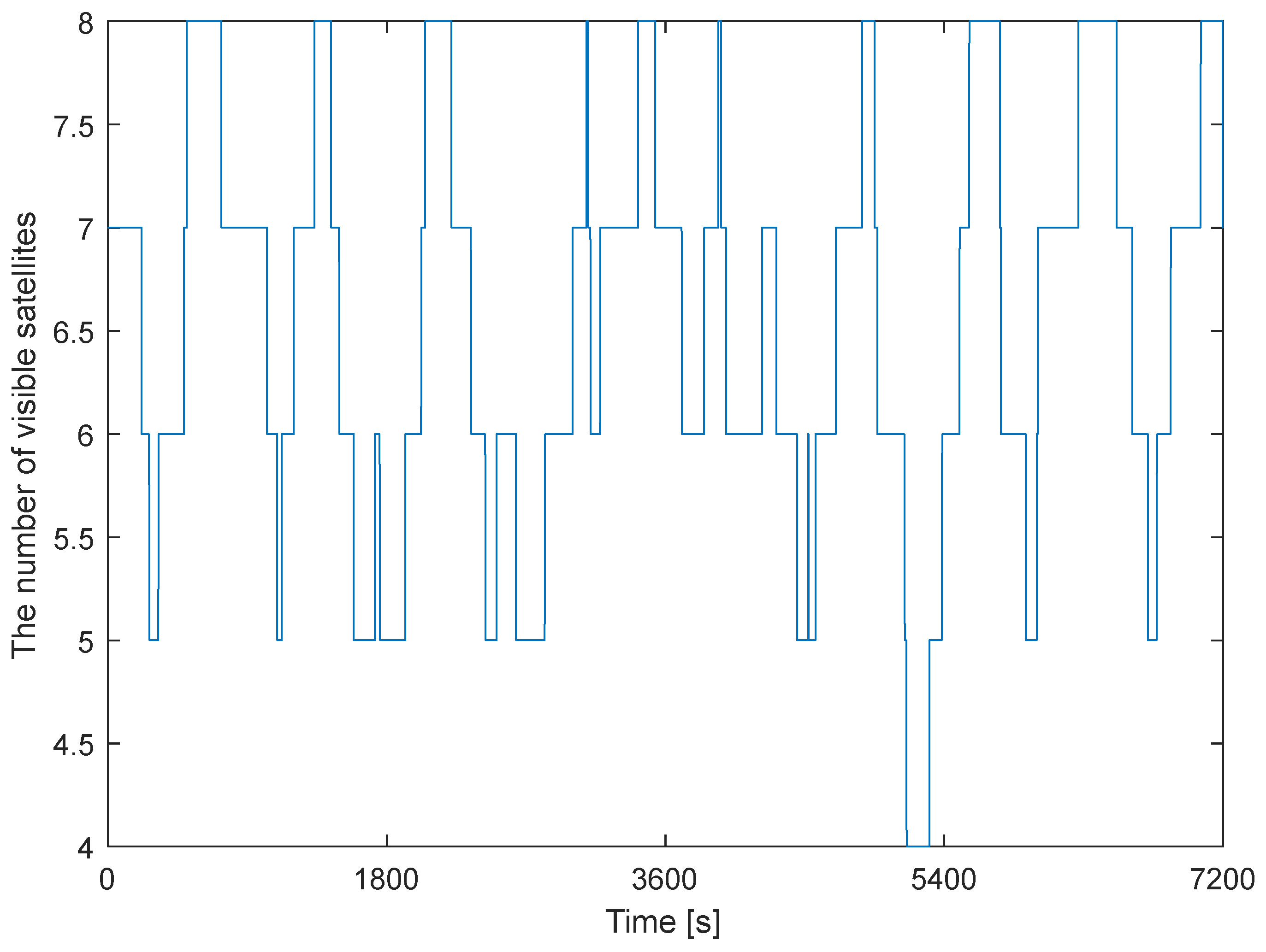
For the baseline case, the orbital altitude of the cooperative constellation is assumed to be 5000 km. The optical sensor noise is assumed to be Gaussian white with a standard deviation of 5 arcsecs. The ephemeris errors of the cooperative constellation are set to 10 m, and the observation sampling interval is set to 1 s.
Figure 6 shows the evolution of the number of visible cooperative satellites over time. To test the navigation performance of the cooperative constellation navigation system, the results of single-point positioning and orbit determination are examined.
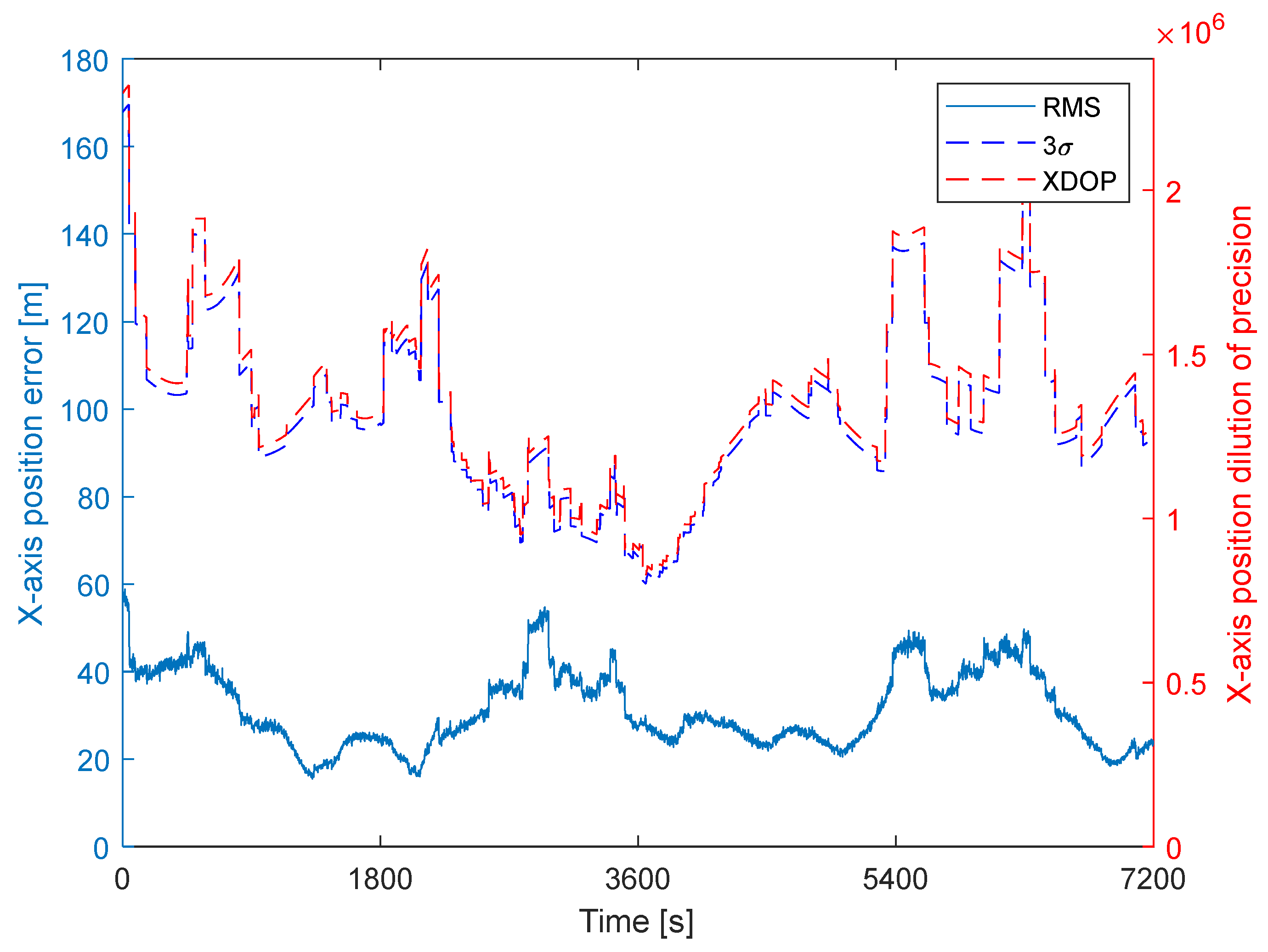
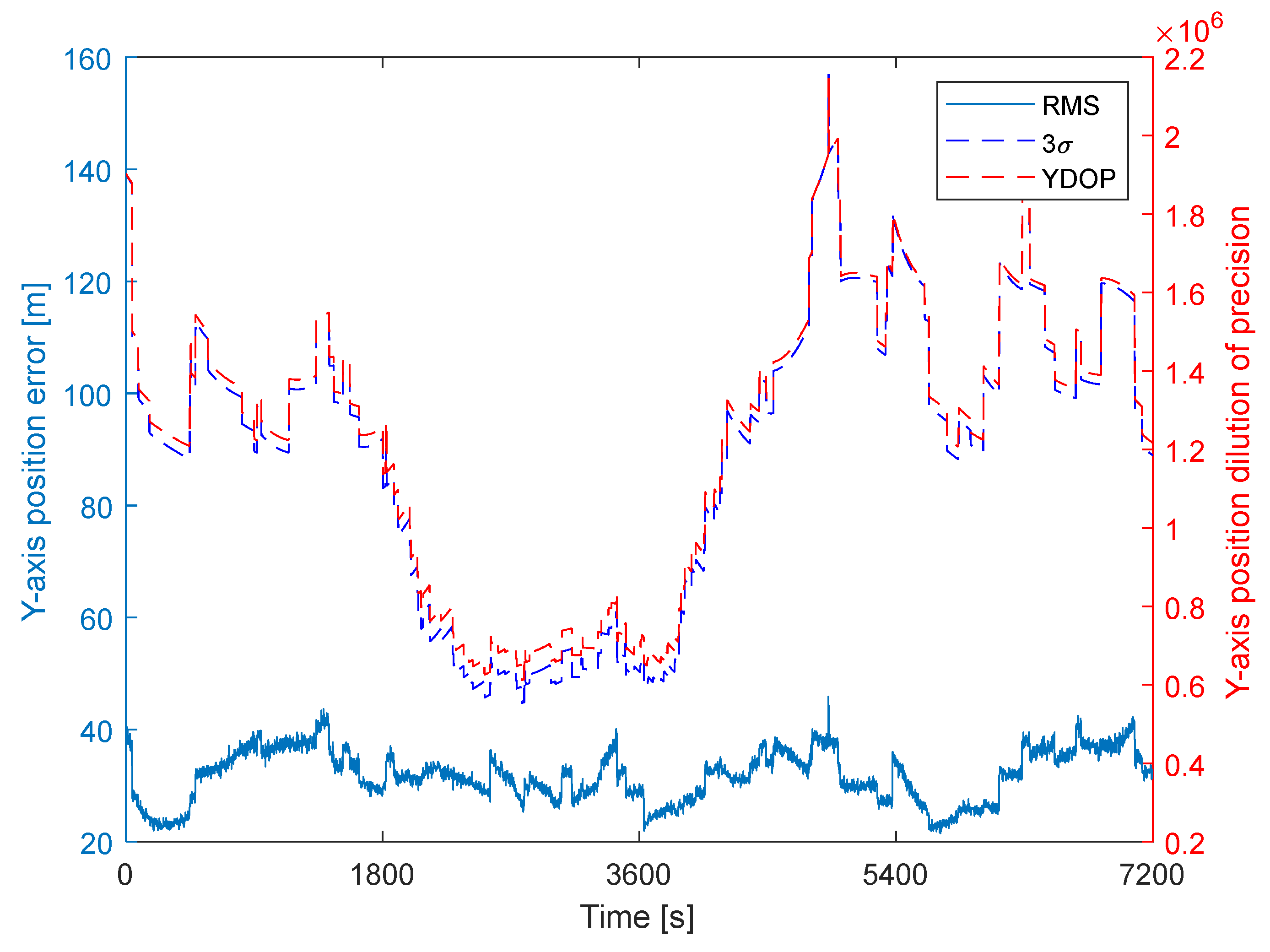
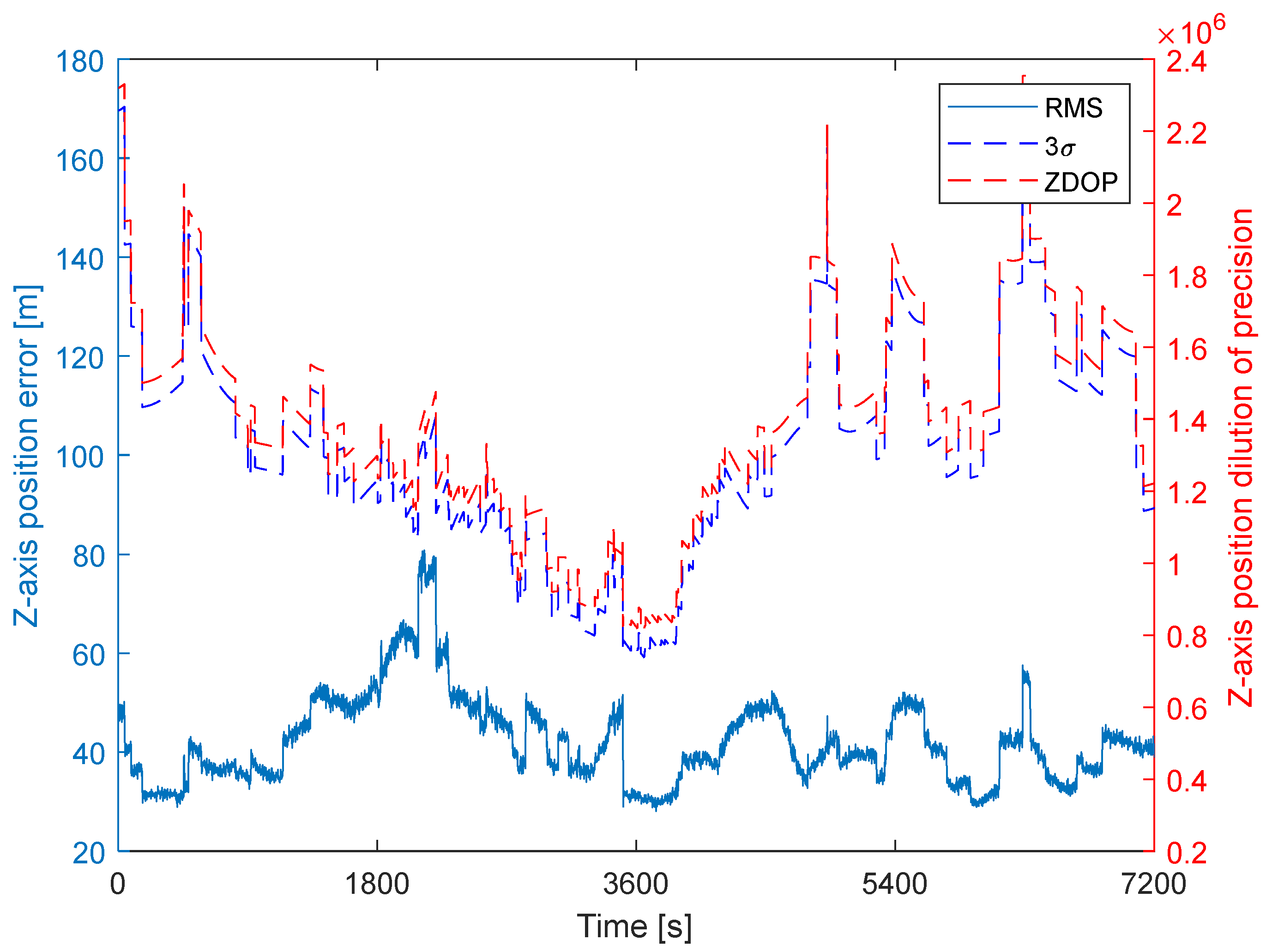
Figure 7,
Figure 8 and
Figure 9 show the evolutions of single-point positioning errors and DOPs over time.
Table 4 shows the root mean square (RMS) of the position errors. It can be seen that variations in the 3-sigma values of the position errors and the values of the DOP are consistent, which demonstrates that the DOP can effectively reflect the position accuracy.
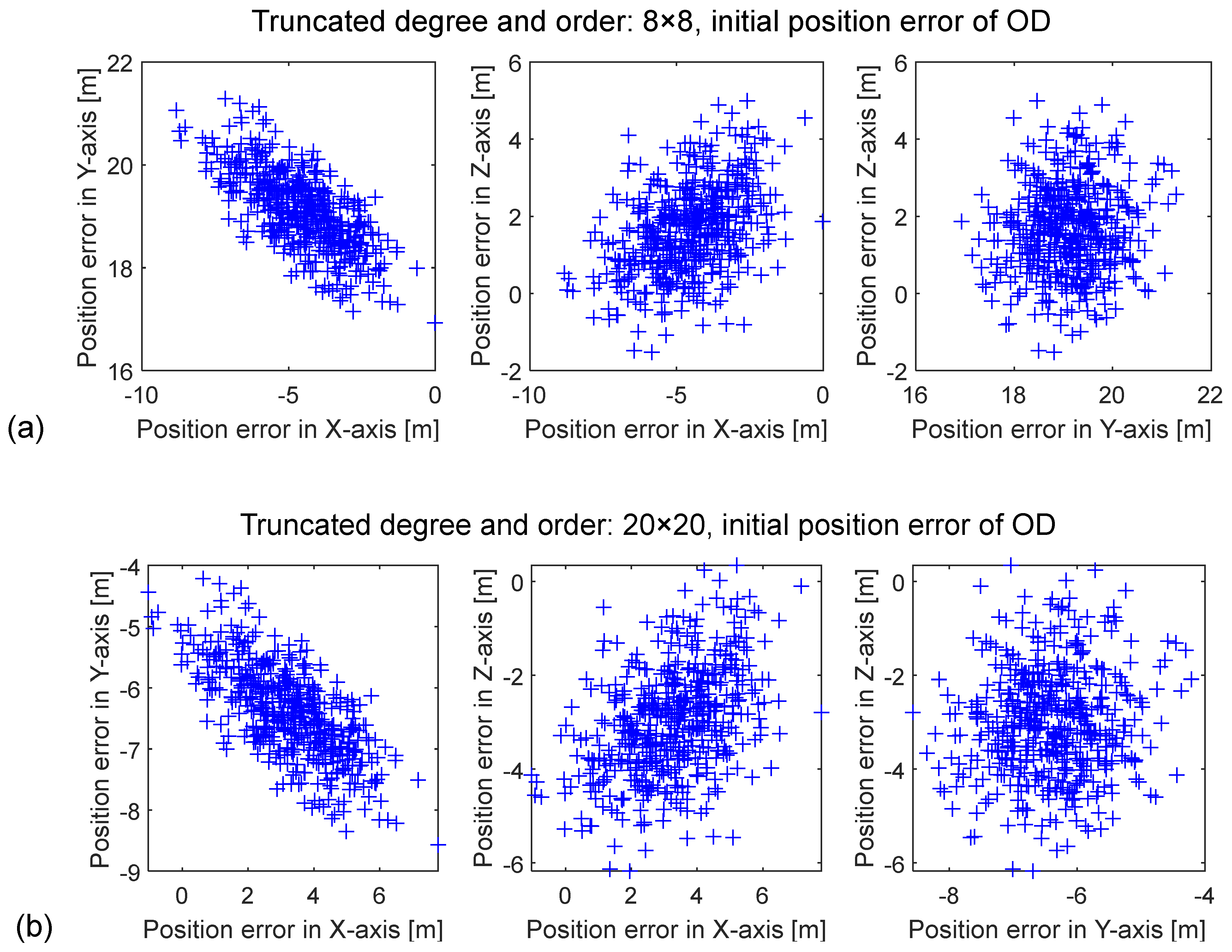
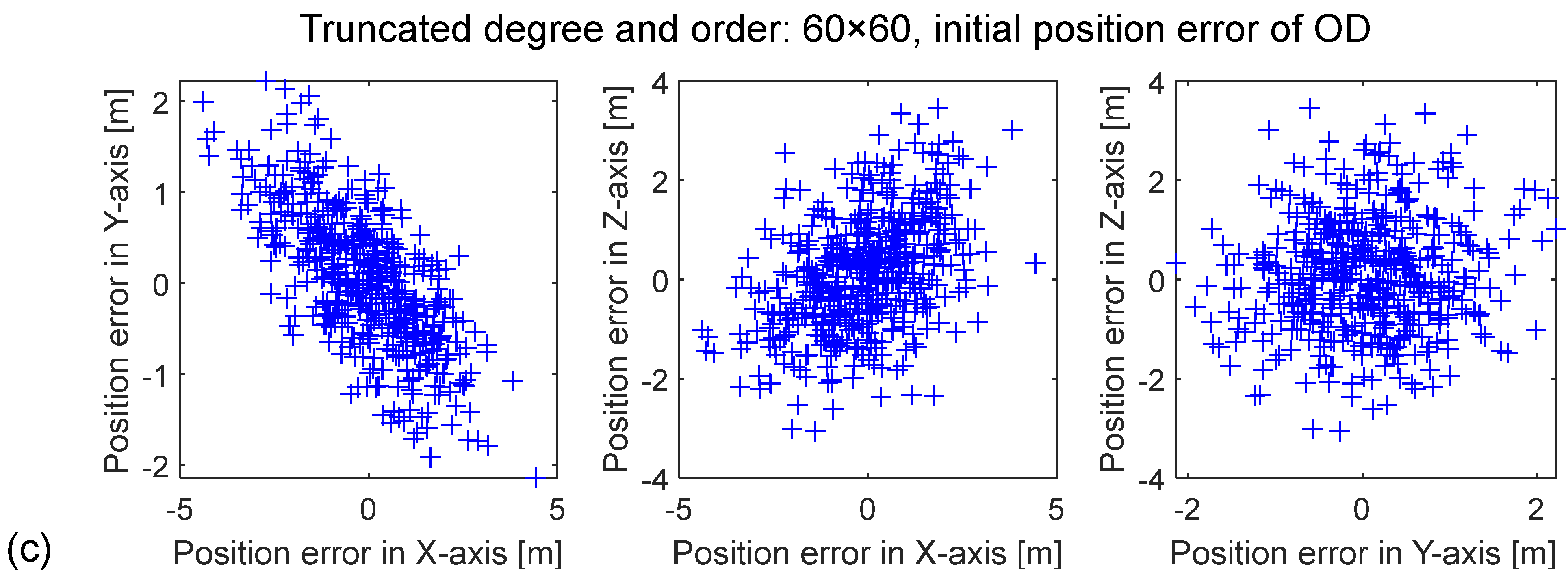
Figure 10 shows the initial position errors of dynamic orbit determination with Earth’s gravitational models truncated at different degrees. Here, the initial position accuracies of the dynamic orbit determination are greatly improved by 43~60 m compared to those of the single-point positioning. In addition, by increasing the truncated degree of Earth’s gravitational model, the position error gradually decreases.
6.4. Influence Factor Analysis
In order to investigate the factors that influence navigation accuracy, the parameters for the noise level of optical measurements, critical parameters of cooperative constellation, truncated degree of the Earth’s gravitational model, and cooperative satellites’ ephemeris errors are changed. Numerical simulations are then performed to analyze the influence of these parameters on navigation accuracy.
6.4.1. Cooperative Constellation Parameters
First, the effects of the orbital altitude of the cooperative constellations are investigated. The distances between the LEO satellite and cooperative satellites, as well as the observations in Equation (24), depend on the orbital altitude of the cooperative constellations, which is a key parameter in navigation. Cases with different cooperative constellation orbital altitudes from 5000 to 36,000 km are simulated. The truncated degree and order of the Earth’s gravitational model is set to 20×20. The rest of the simulation conditions are the same as those of the baseline case.
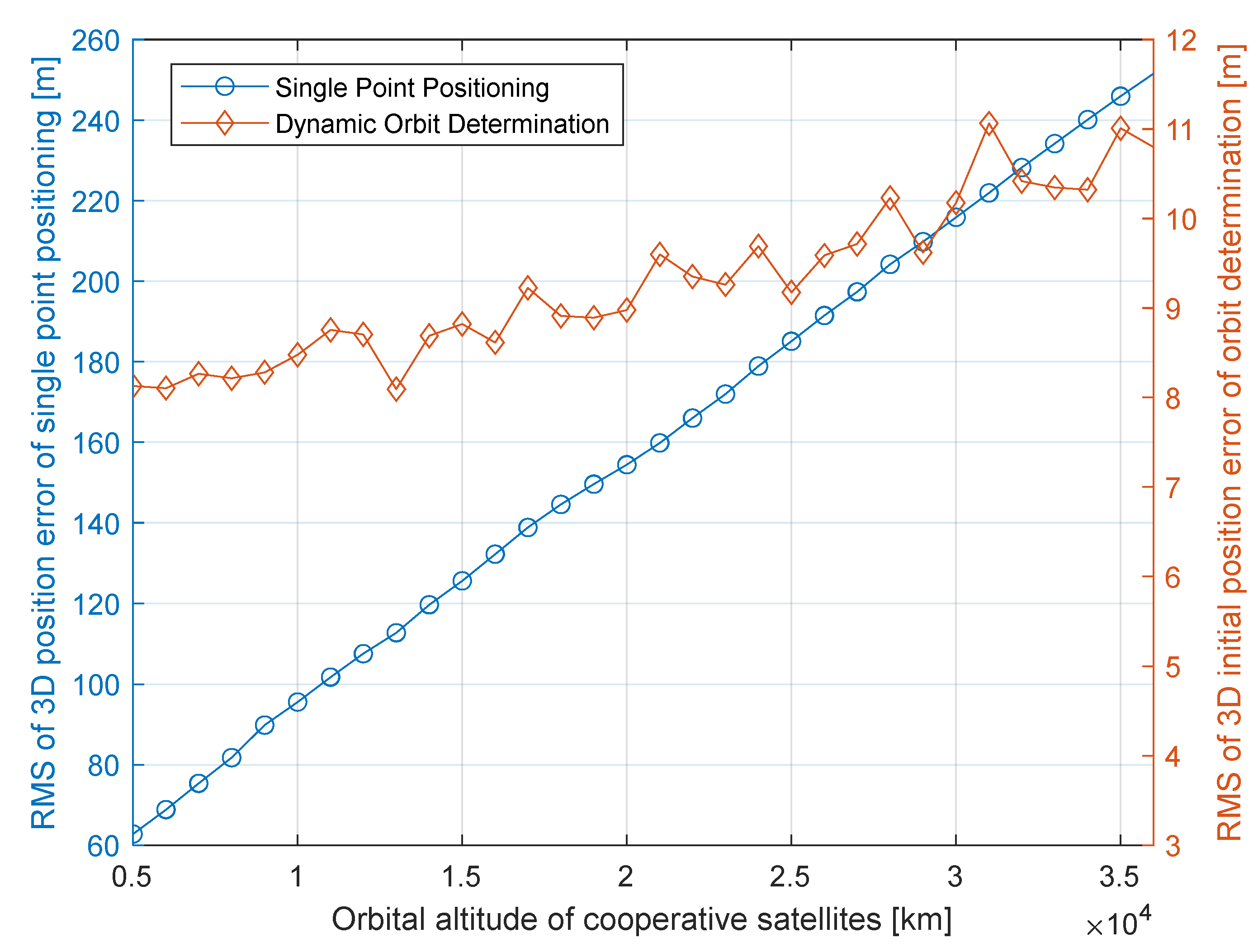
The statistical RMS values of the 3D position errors are shown in
Figure 11. Here, an increase in the orbital altitude of cooperative constellation results in low navigation accuracy. By increasing the orbital altitude of the cooperative constellation, the number of visible cooperative satellites increases, which slightly improves the DOP. The distances between the LEO satellite and cooperative satellites also increase, which results in the serious deterioration of the DOP. Under the combined effects, the navigation accuracy of single-point positioning significantly degrades. After adopting dynamic orbit determination, navigation accuracy is greatly improved. In addition, the influence of orbital altitude on the navigation errors of orbital determination becomes smaller than that on the position errors of single-point positioning.
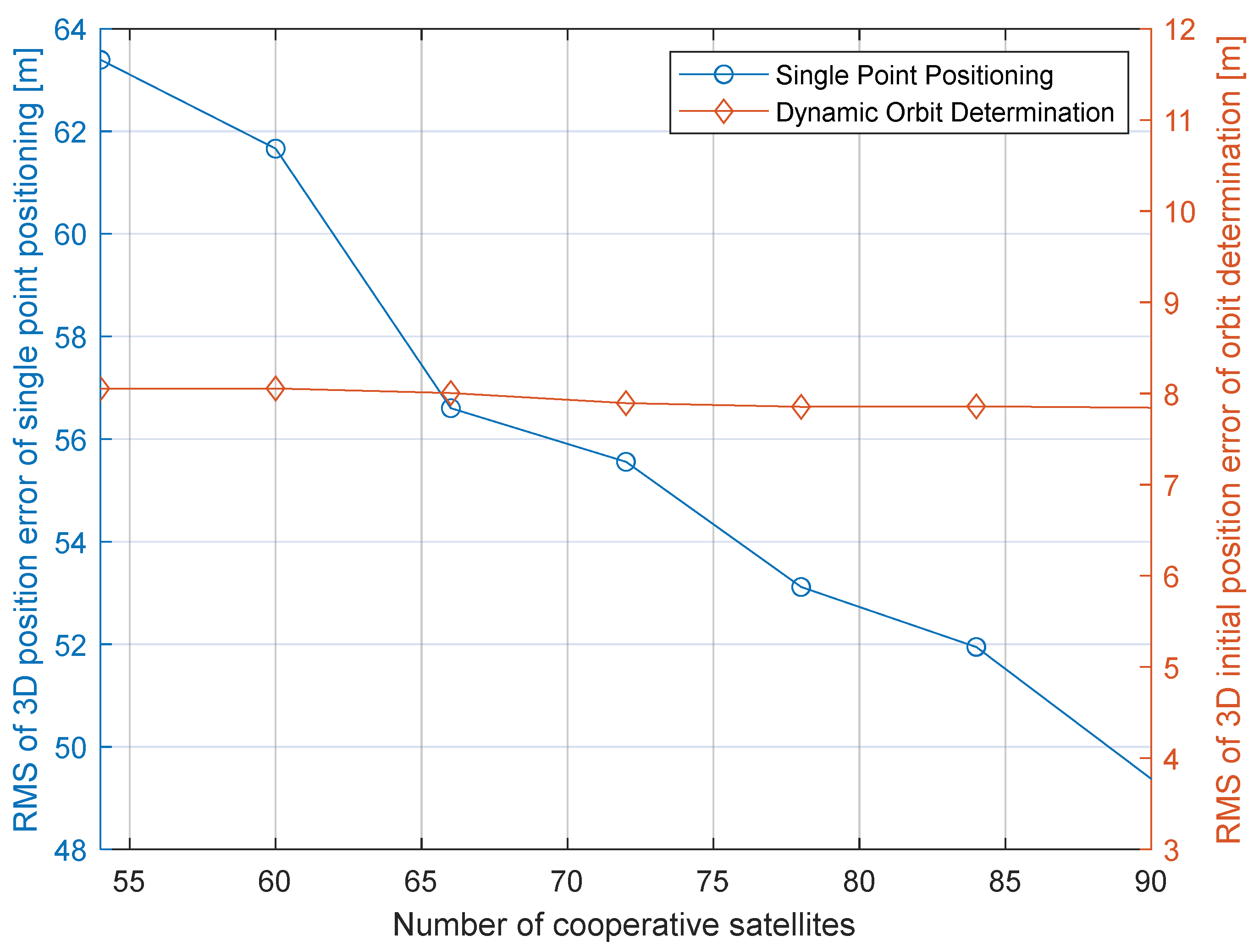
The effects of the number of cooperative satellites are also examined, and different numbers of cooperative satellites from 54 to 90 are adopted. In this simulation, the truncated degree and order of the Earth’s gravitational model is set to 20×20. The rest of the simulation conditions are the same as those of the baseline case. The statistical RMS values of the 3D position errors for these cases are shown in
Figure 12. As the number of cooperative satellites increases, more abundant observation geometry can be obtained, leading to better positioning accuracy.
Next, the effects of the orbital plane number and constellation configuration number are investigated. The orbital plane number is set to three different values of 3, 6, and 9. The truncated degree and order of the Earth’s gravitational model is set to 20×20. The statistical RMS of the 3D position errors with different orbital plane numbers is shown in
Table 5. The position accuracy increases slowly with an increase in the orbital plane number. This phenomenon occurs because as the orbital plane number increases, the observed cooperative satellite number slightly improves.
Finally, the effects of the constellation configuration number are also analyzed. The different constellation configuration numbers are set to 1, 1.5, and 2. The truncated degree and order of the Earth’s gravitational model are set to 20×20. The statistical RMS of the 3D position errors of the different constellation configuration numbers are shown in
Table 6. It can be seen that the constellation configuration number has little effect on navigation accuracy.
6.4.2. Ephemeris Errors of Cooperative Satellites
The ephemeris errors are set to four different values: 0, 10, 50, and 100 m. The truncated degree and order of the Earth’s gravitational model are set to 20×20. The remainder of the simulation conditions remain the same as those of the baseline case.
The statistical RMS values of 3D position errors for these cases are shown in
Table 7. As the ephemeris errors increase, the single-point positioning errors also increase greatly, whereas the position errors of dynamic orbit determination increase slightly. When the cooperative satellite orbit determination accuracy is at a 100 m level, the ephemeris errors of cooperative satellites have little effect on navigation accuracy.
6.4.3. Noise Level of Measurement
Here, the noise level of optical measurements is set to three different values: 5 arcsecs, 10 arcsecs, and 15 arcsecs. The truncated degree and order of the Earth’s gravitational model is set to 20×20. The rest of the simulation conditions are the same as the baseline case.
The statistical RMS 3D position errors for these cases are shown in
Table 8. Here, navigation accuracy is approximately linear to the noise level of optical measurements. In addition, by increasing the noise level of the optical measurements, navigation accuracy is greatly reduced. As a consequence, the optical measurement noise level is taken as the main parameter affecting navigation accuracy.
According to the above simulation results and analysis, the proposed cooperative constellation navigation system along with the related single-point positioning and batch orbit determination algorithm can effectively navigate the LEO satellite. The simulation results can be summarized as follows:
- (1)
For critical parameters of cooperative constellations, reducing the orbital altitude of cooperative satellites and increasing the number of cooperative satellites can improve navigation accuracy. The position accuracy increases slowly with an increase in the orbital plane number, and the constellation configuration number has little effect on navigation accuracy.
- (2)
The ephemeris error of the cooperative satellite has little influence on navigation accuracy.
- (3)
The optical measurement error is the main factor that affects navigation accuracy. Thus, it is vital to carry a dedicated optical sensor onboard the LEO satellite to realize accurate navigation.
- (4)
After introducing the dynamic orbit determination method, the navigation accuracy of the navigation system is greatly improved, and the influence of external factors on navigation accuracy is greatly reduced.
- (5)
The influence of Earth’s gravitational model errors on navigation accuracy is evident, as Earth’s gravitational model errors can significantly affect orbit propagation errors. Therefore, reducing dynamic model errors is of great importance in realizing high-precision orbit determination.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}