
Numerical Analysis of Glauert Inflow Formula for Single-Rotor Helicopter in Steady-Level Flight below Stall-Flutter Limit


Abstract
:1. Introduction
2. GIF Formulation and Solution Procedure
3. Models and Methods
- Definition of a method for determining the APR;
- Presentation of the APR with a finite number of cases.
- Selection of a finite number of cases for APR boundaries determination purposes;
- Establishing the APR boundaries as , , and ;
- Establishing a more expansive APR zone with an acceptable safety margin;
- Determination of the finite number of possible cases as APR zone representatives for numerical methods evaluation purposes.
3.1. Available Power Limit
3.2. Stall Flutter Limit
3.3. Numerical Methods and Procedures
- Standard arithmetic precision;
- Arbitrary arithmetic precisions (only for the benchmark solution);
- Initial values are taken from Table (2);
- Stopping criteria () or “one iteration”;
- Stopping criteria (only for the benchmark solution);
- Several one-point and multipoint iterative methods without memory for solving nonlinear equations.
- Maximum, minimum, and average iteration number (ITNumb) as a function of for the entire APR.
- Maximum real relative error (Et) for all examined cases;
- Percentage of cases of failed convergence, if any;
- Presence of non-physical roots;
- Quality assessment of used initial values;
- Quality assessment of iterative methods.
4. Results and Discussion
4.1. APR Determination
4.2. GIF Numerical Analysis
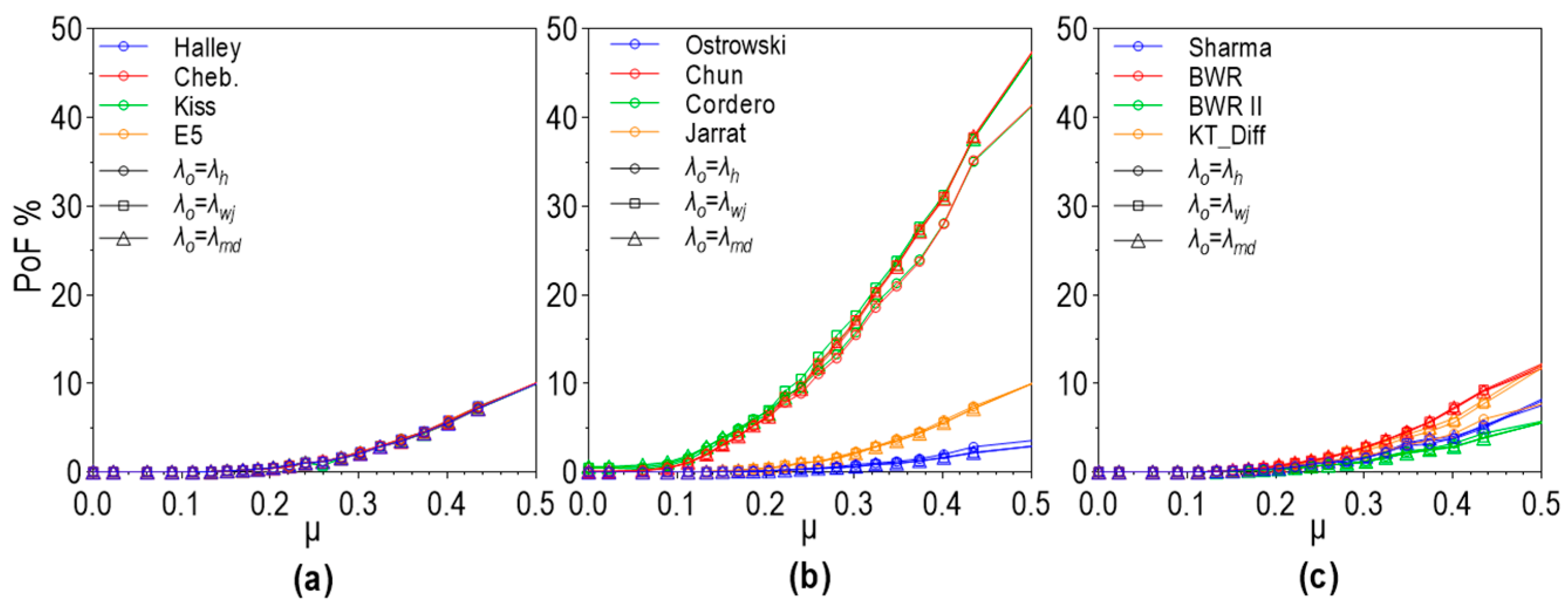
4.2.1. Percentage of Failed Convergence (PoF)
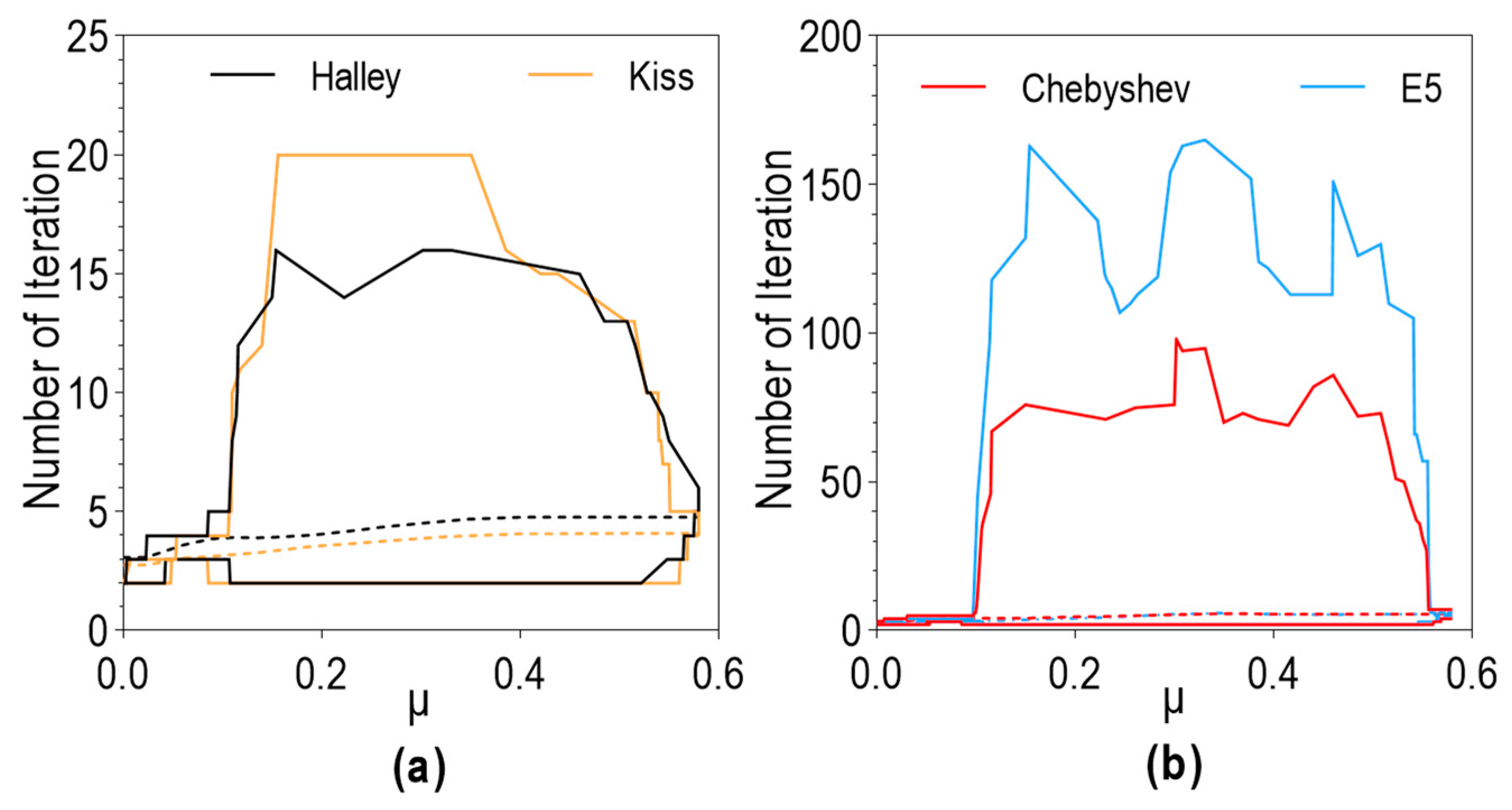
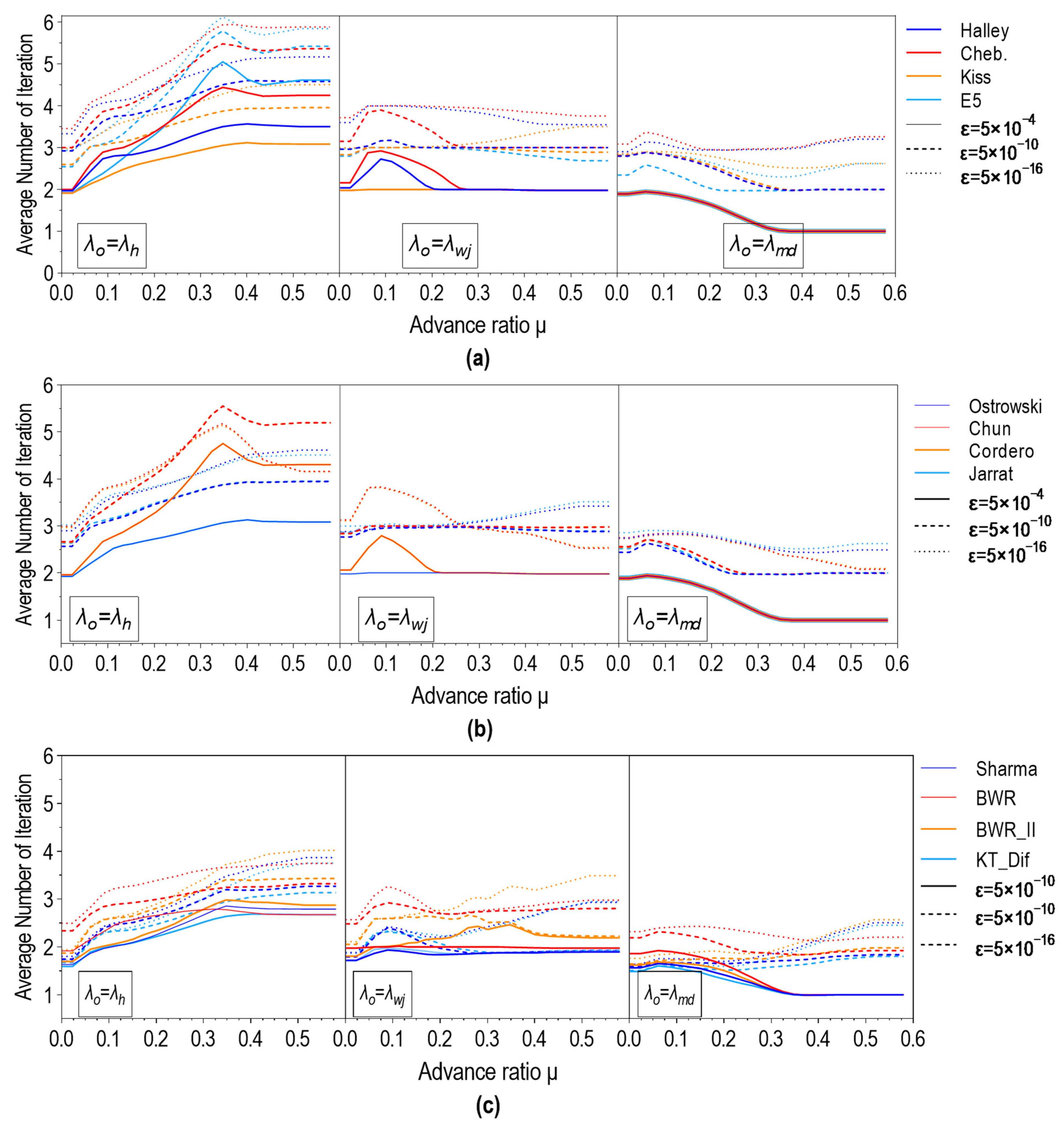
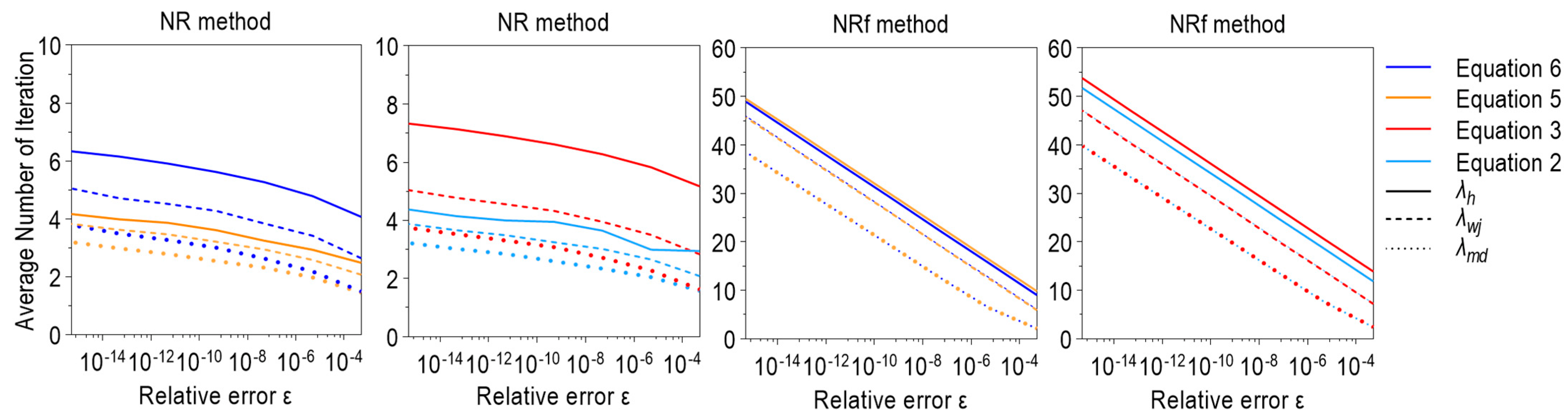
4.2.2. Number of Iterations (ITNumb)
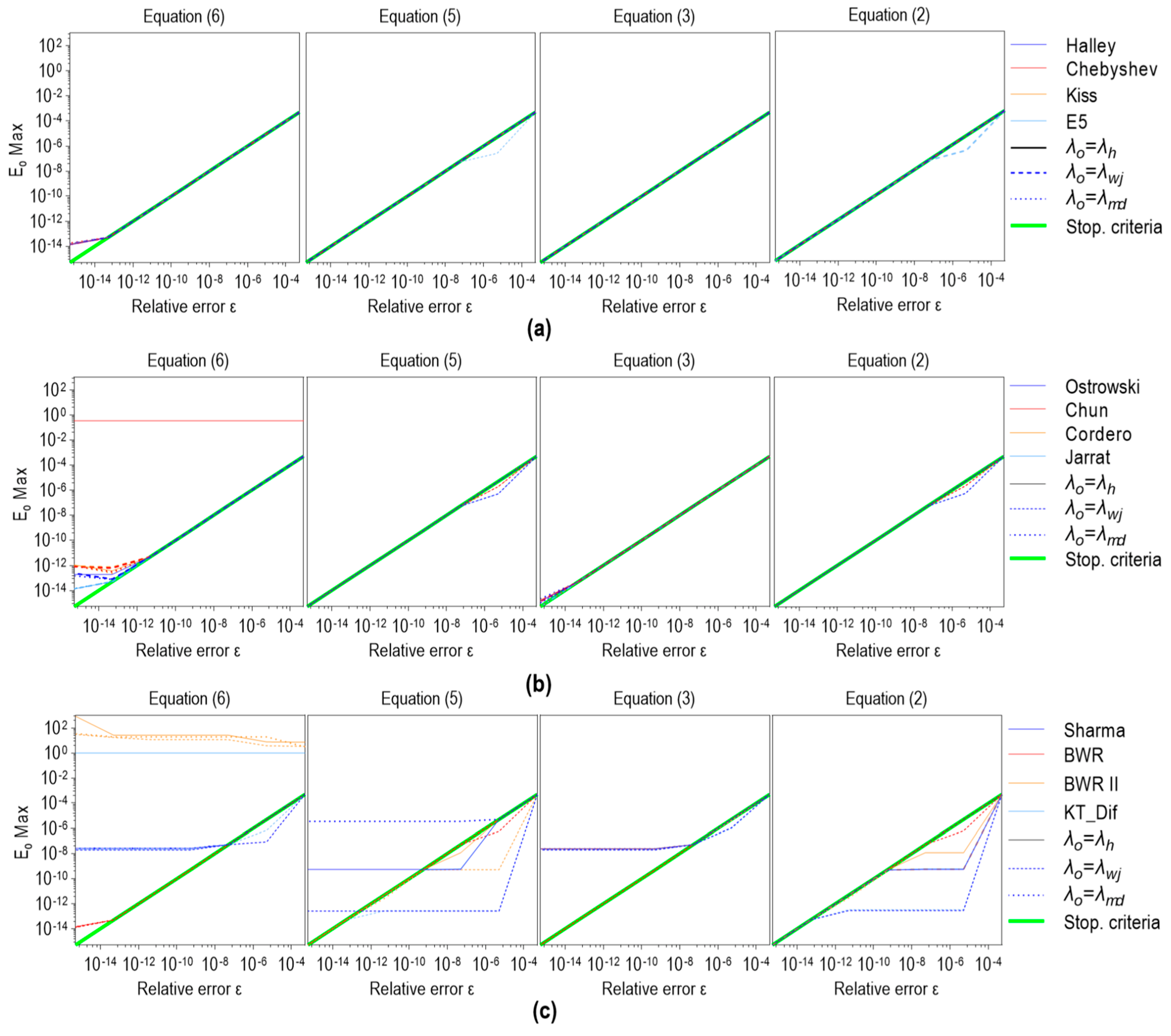
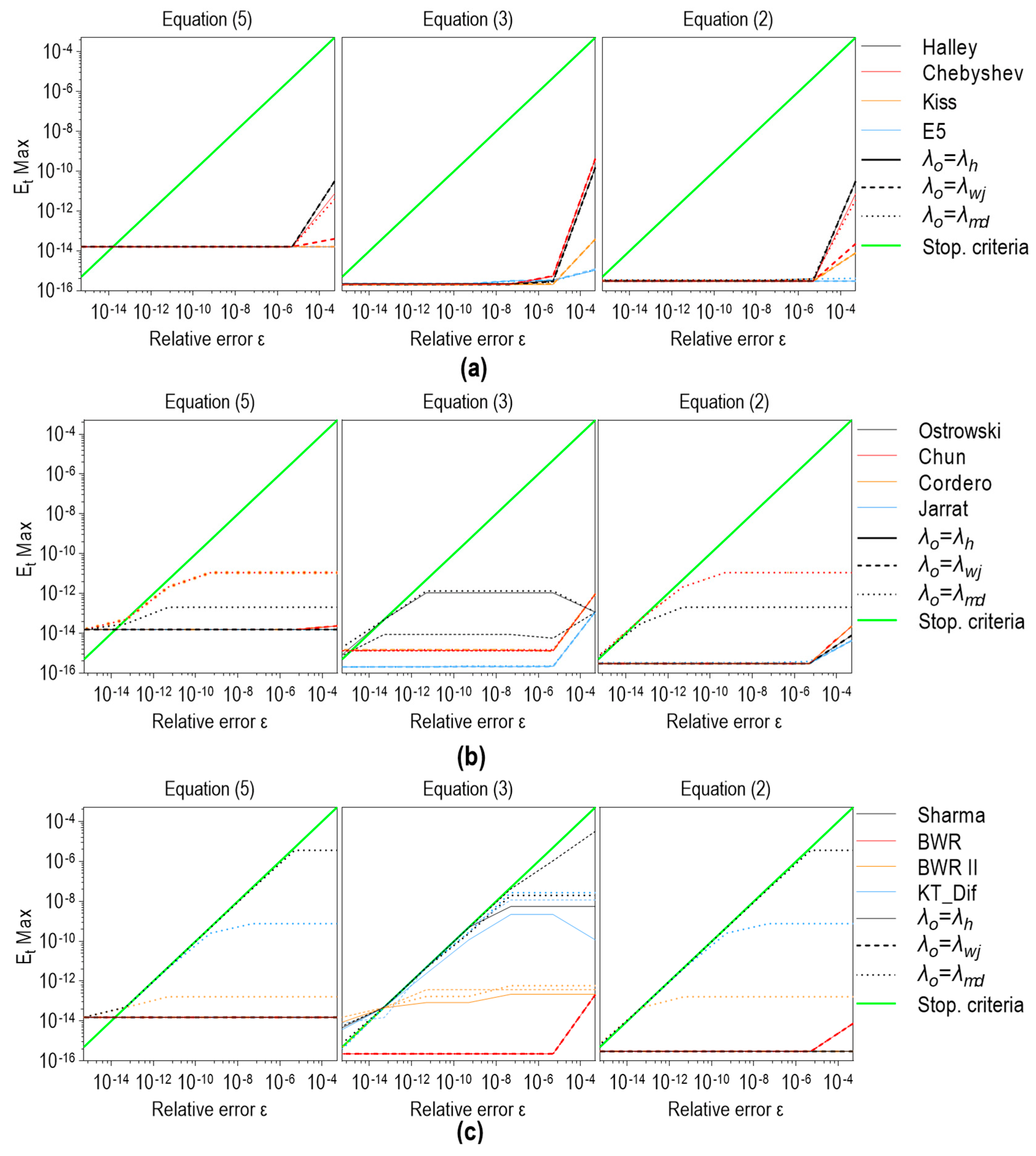
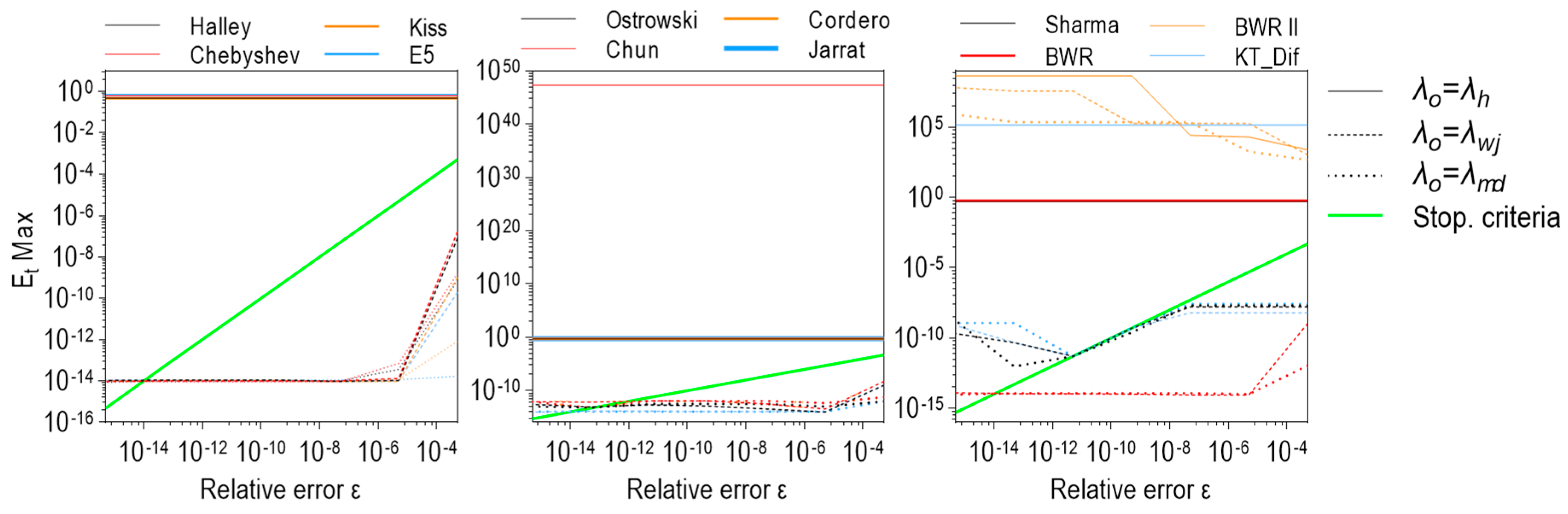
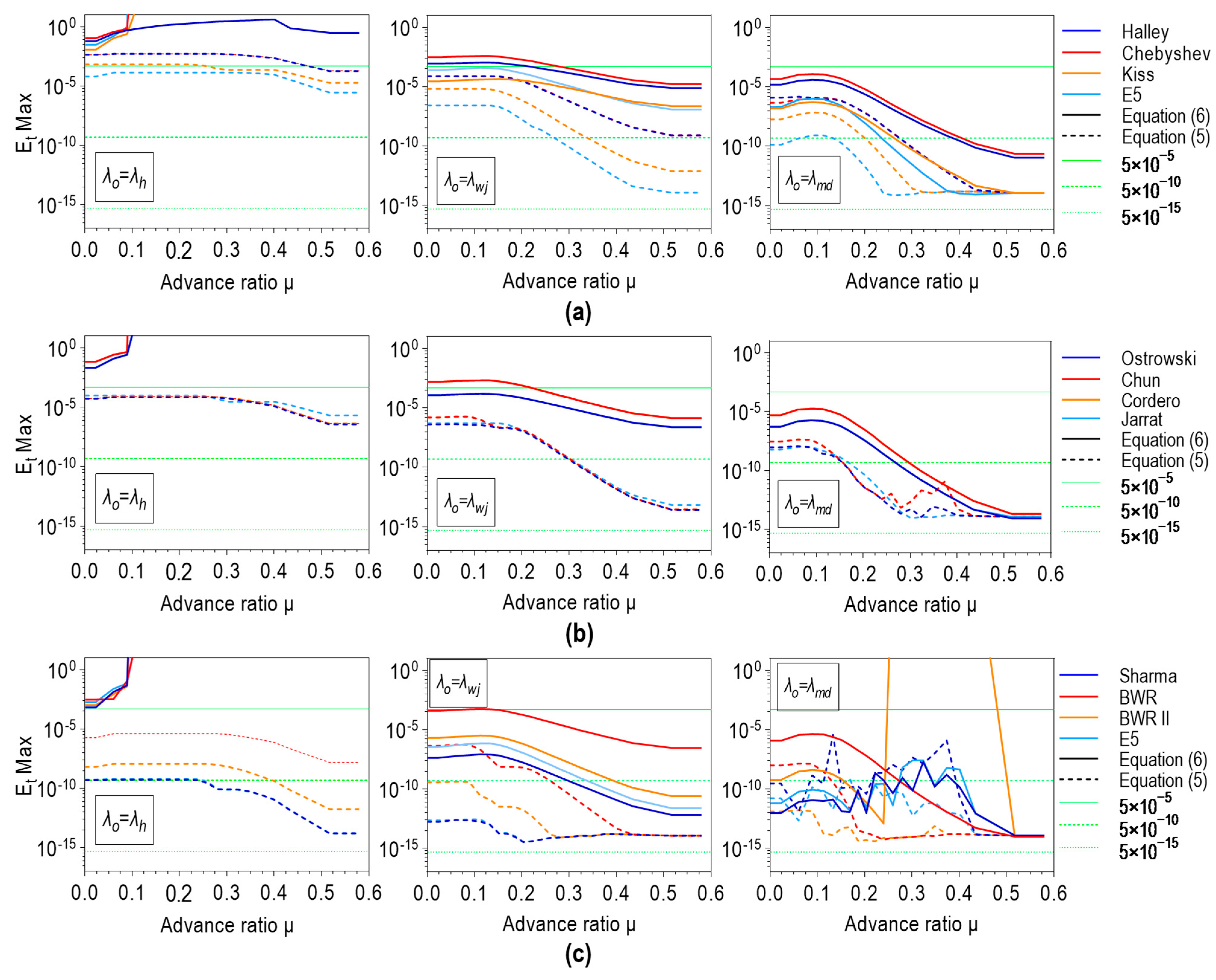
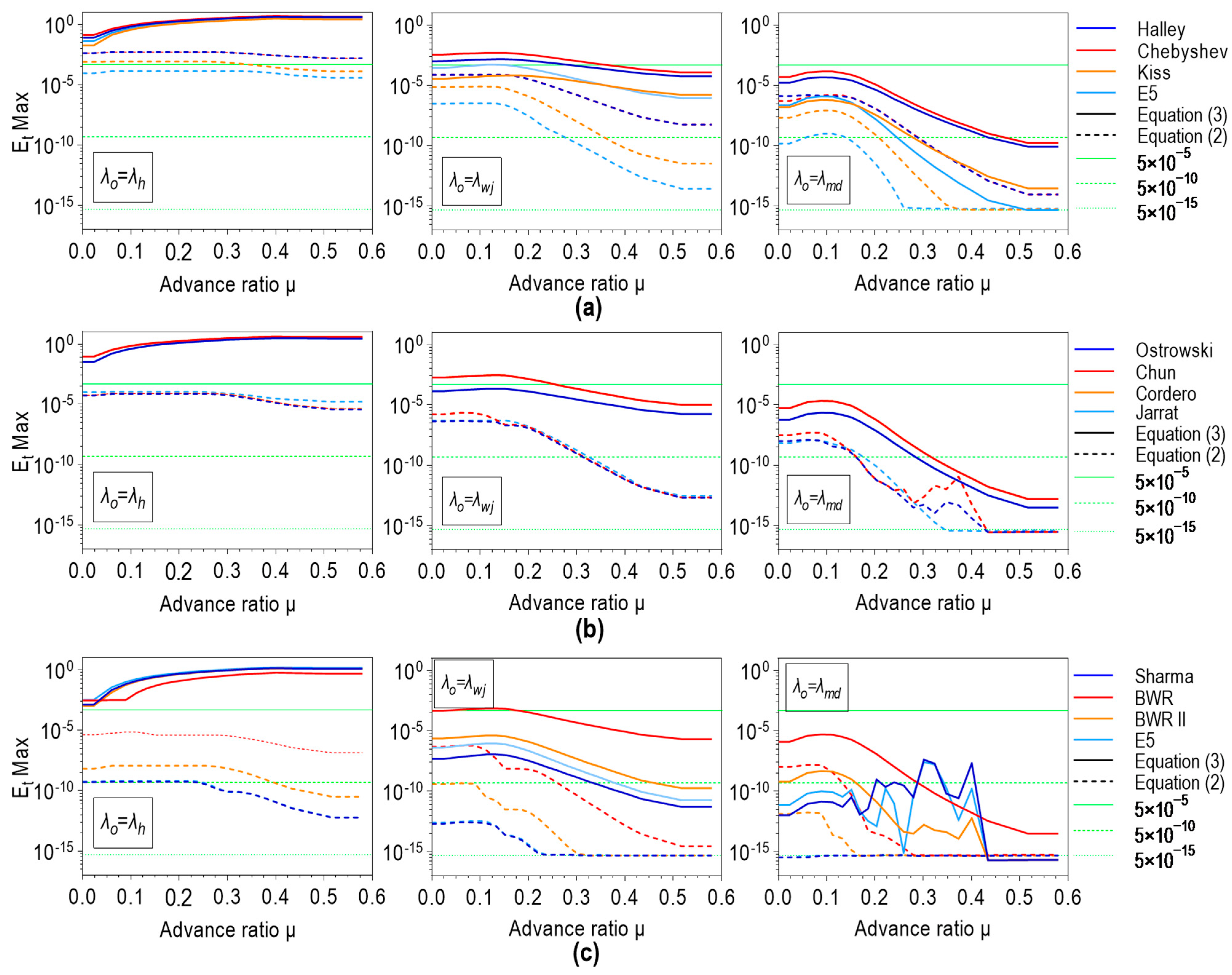
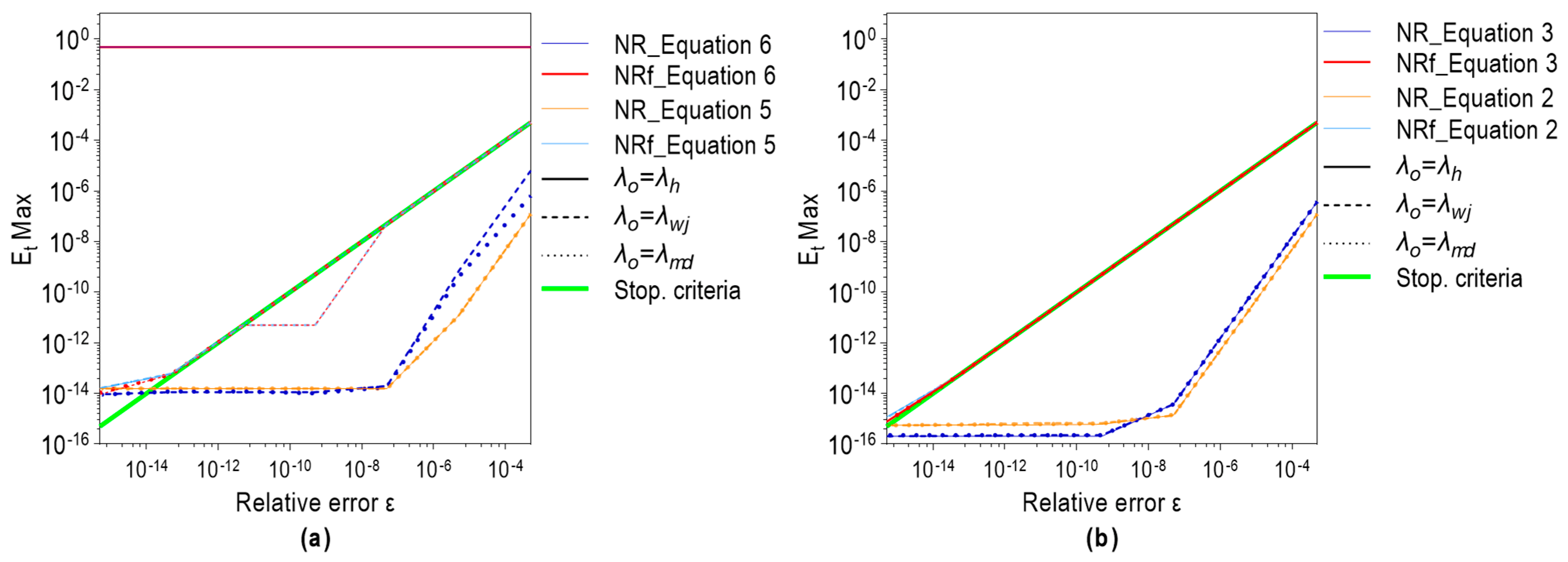
4.2.3. Relative Errors (, )
- —an iterative process is accomplished, convergence is achieved, the input criterion is fulfilled, and the output solution is ;
- —the stopping criterion is not activated, but the iterative process is interrupted due to the failed convergence or due to an inappropriate solution (NaN, infinite, or zero). Then, becomes a final numerical solution .
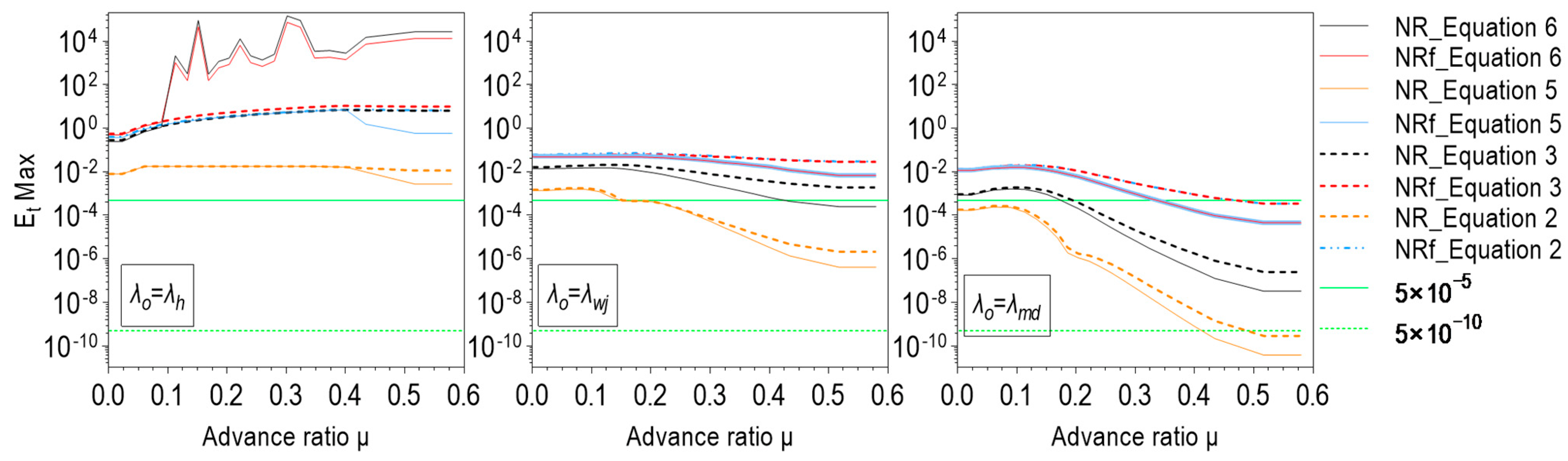
- The first case () can be seen in the following diagrams in Figure 8;
- Equation (6), all methods, all initial values;
- Equations (2), (3), and (5), one-point methods, all initial values;
- Equation (3), two-point methods, all initial values.
- Chun and KT Diff, which gives for all stopping criteria where ;
- KT Diff with , which gives ;
- Sharma with , which gives for .
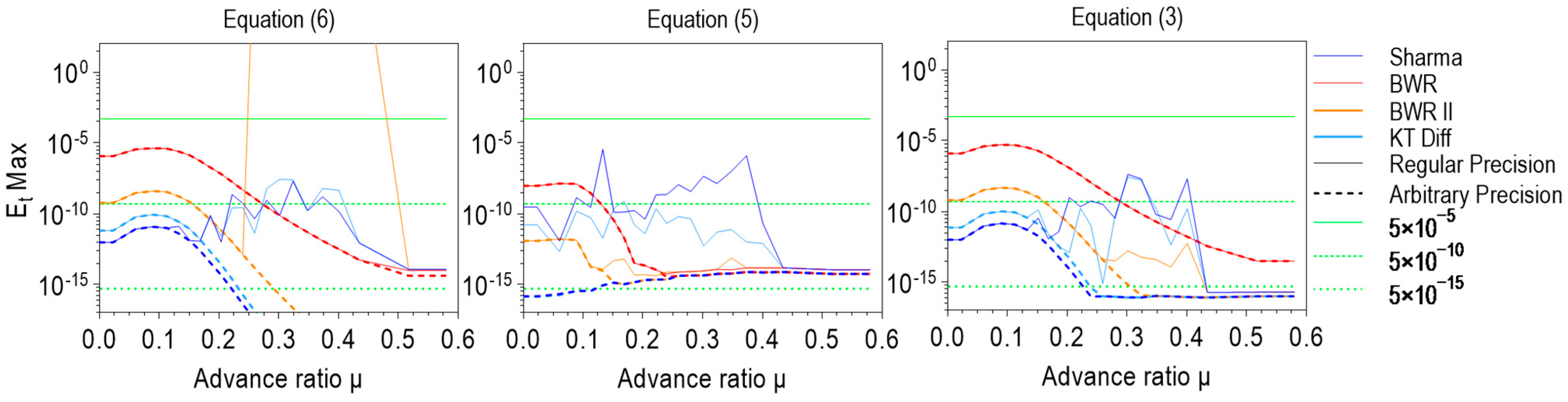
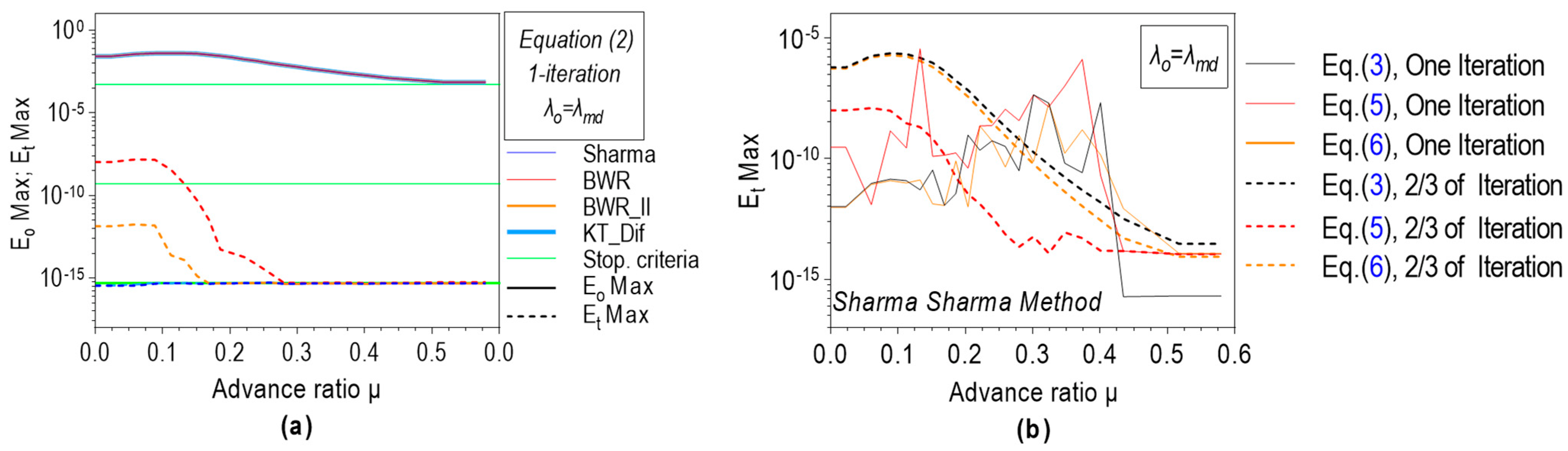
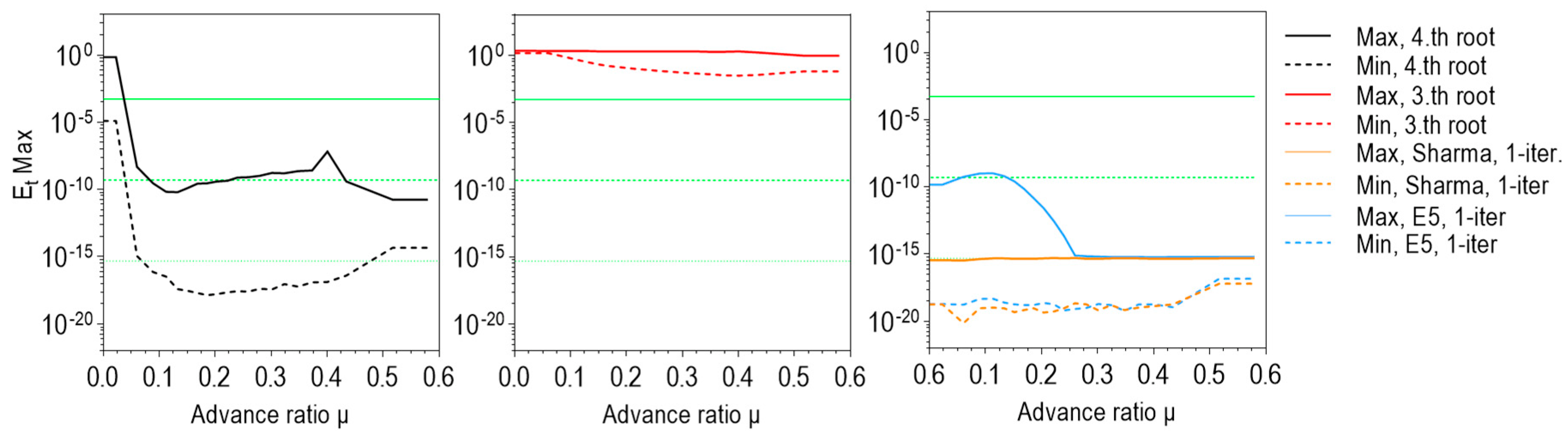
4.2.4. One Iteration Solution
- Convergence towards an extraneous root may occur if is used as an initial value to solve Equation (6), regardless of chosen method;
- The solutions of Equation (3) obtained in one iteration with has no practical significance regardless of the chosen method due to the very large maximal relative error concerning the benchmark solution ();
- Failed convergence may occur if the BWR II method and initial value are used to solve Equation (6) with standard arithmetic precision;
- Some anomalies in magnitude may appear if multipoint methods and are used together to solve all forms of GIF except Equation (2), where no anomalies;
- is certainly reached over the entire range of advance ratio if the Sharma or KT Diff method is used in conjunction with to solve Equation (2) which applies to standard arithmetic precision architecture. Figure S13 shows that the above conclusion applies only to the APR zone, i.e., that the numerical methods have worse performance outside the above zone;
- E5 one-point method used with to solve Equations (2) and (3) provides high accuracy of obtained solution where for low advance ratios and for .
4.2.5. Newton–Raphson Method
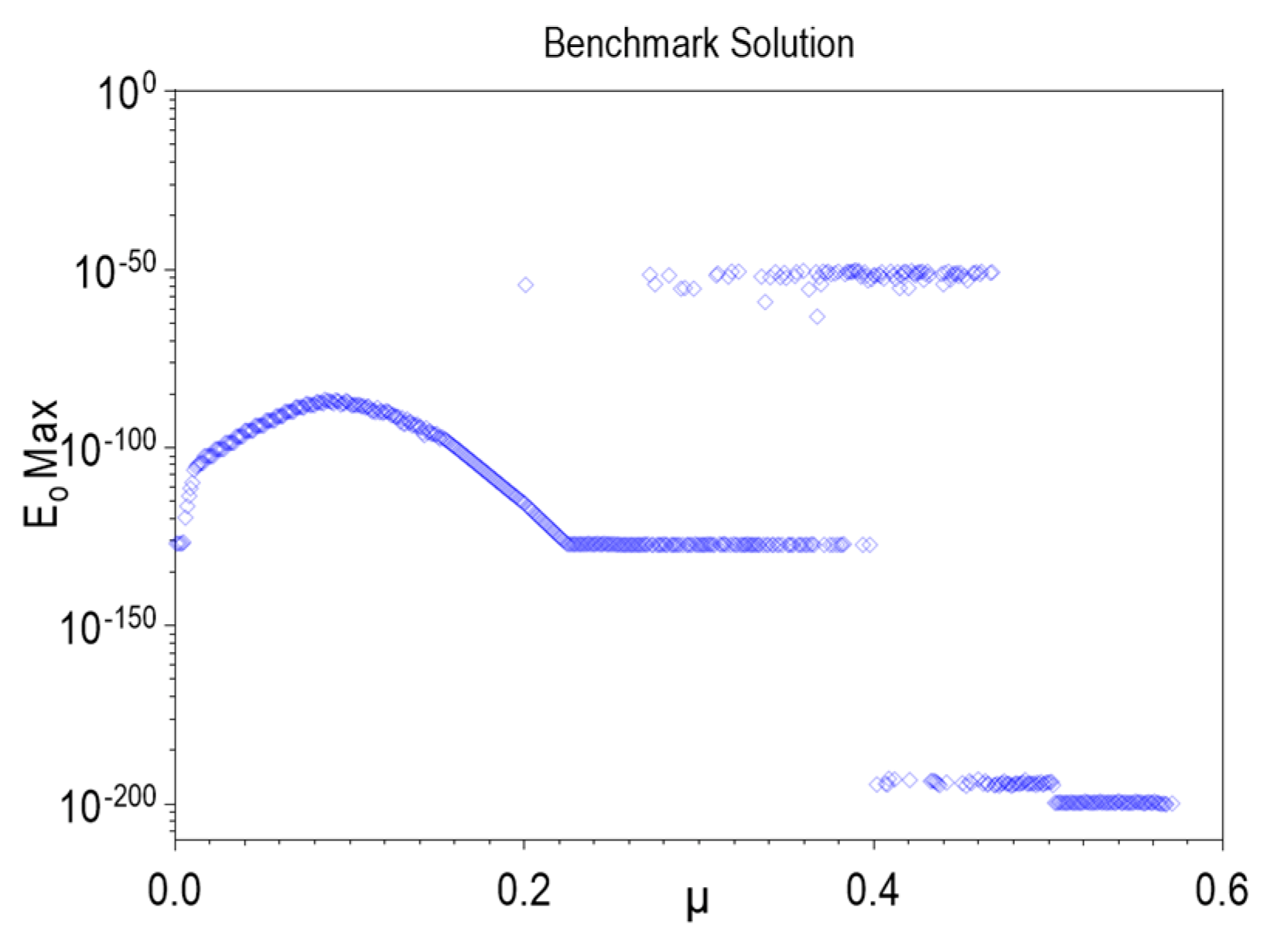
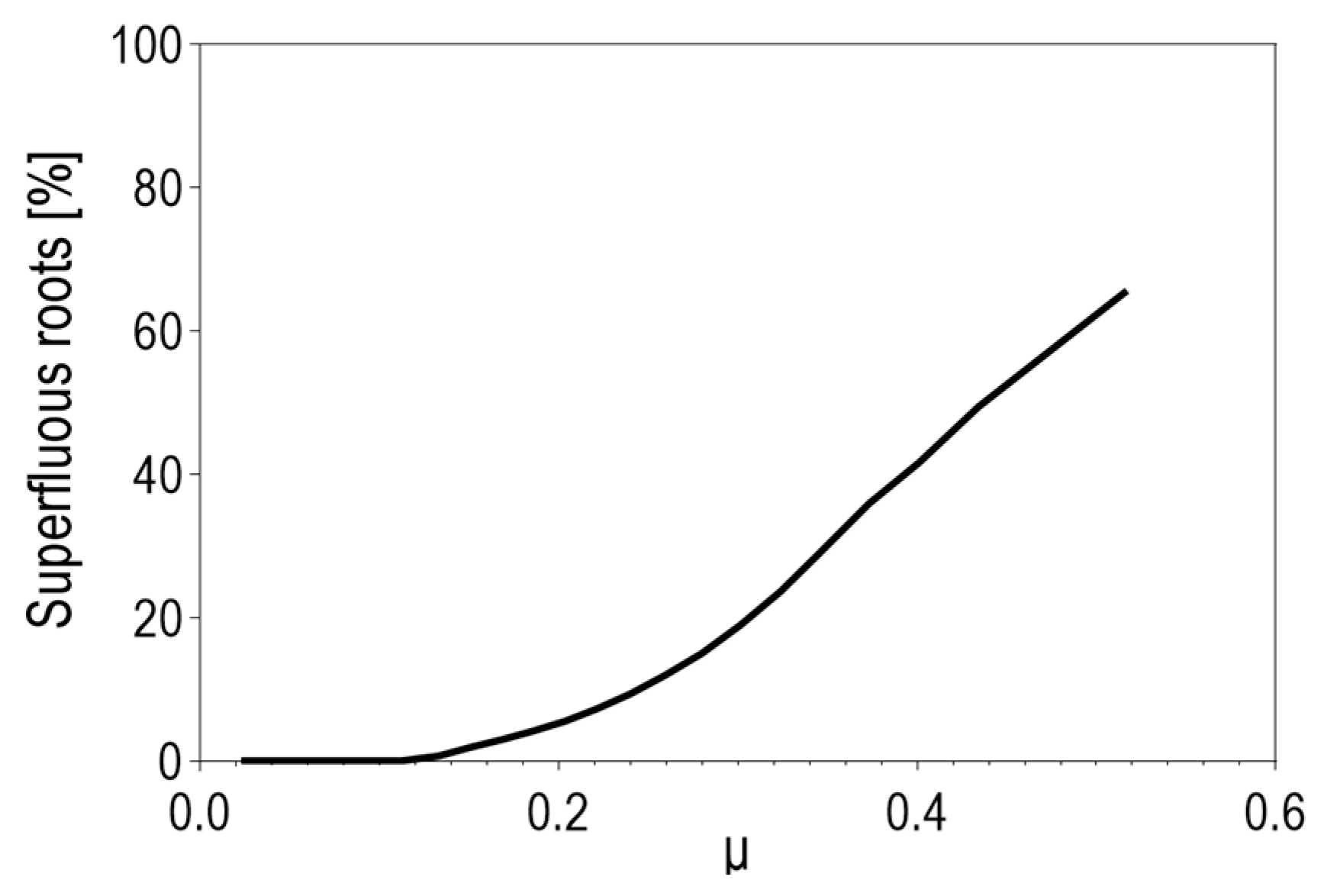
4.3. GIF Analytical Solution
- The first two roots form a complex conjugate pair in 100% of tested cases and can be completely rejected;
- The third and fourth roots form a complex conjugate pair in 2.8% of tested points;
- The third and fourth roots are a NaN in 1.25% of cases;
- The third root is a negative real number in 49.6% of cases;
- If it is not a NaN or complex number, the fourth root represents a physical solution;
- The analytical solution is found in about 95% of the tested cases.
4.4. GIF Computational Cost
5. Conclusions and Recommendations
- The use of for the numerical solution of the Glauert inflow equation results in a smaller number of iterations and a higher accuracy of the obtained solution compared to the case when the induced ratio in hover is used as an initial guess;
- Modifying the previously mentioned initial value () gives an even better result: the smallest average number of iterations and the highest precision of the solution regardless of the used method and stopping criteria;
- The chosen form of the Glauert inflow equation (rational or irrational, with unknown or ) directly affects the performance of the numerical solution where the best convergence failure-free performance gives Equation (2);
- Optimal three-point methods used along with and high accuracy requested often lead to anomalies that significantly degrade the performance of the used method, and in this regard, it is much better to use them in only one iteration procedure for standard precision arithmetic;
- Multi-precision arithmetic is computationally expensive, but it completely frees the solutions from the accompanying anomalies;
- Analytical solutions in the standard arithmetic precision environment perform much worse than numerical solutions;
- The Sharma–Sharma, KT Diff, and optionally E5 methods, used in only one iteration, with as an initial value for induced inflow ratio in solving Equation (2), have all attributes to become methods of choice for solving the GIF for a single-rotor helicopter in steady-level flight conditions below dynamic stall limit.
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| rotor tip speed statistical factor | |
| minimum value of rotor tip speed statistical factor | |
| maximum value of rotor tip speed statistical factor | |
| blade lift-curve slope with compressibility effect | |
| blade lift-curve slope without compressibility effect | |
| speed of sound | |
| first harmonic coefficient of longitudinal blade flapping with respect to shaft | |
| rotor diameter statistical factor | |
| minimum value of rotor diameter statistical factor | |
| maximum value of rotor diameter statistical factor | |
| first harmonic coefficient of lateral blade flapping with respect to shaft | |
| blade chord | |
| main drag coefficient of rotor blades | |
| main drag coefficient of tail rotor blades | |
| equivalent helicopter drag area, including fuselage, gear, rotor hub and tail, | |
| equivalent helicopter drag area at | |
| equivalent helicopter lift area | |
| altitude | |
| minimum altitude | |
| maximum altitude | |
| altitude increment | |
| equivalent helicopter drag area empirical factor | |
| minimum value of equivalent helicopter drag area empirical factor | |
| maximum value of equivalent helicopter drag area empirical factor | |
| induced power empirical factor | |
| mass increment | |
| convergence relaxation factor | |
| mean lift coefficient, | |
| power coefficient, | |
| profile power increase due to the compressibility effect | |
| thrust coefficient, | |
| minimum thrust coefficient | |
| maximum thrust coefficient | |
| parasite drag of rotorcraft | |
| fuselage parasite drag force | |
| local relative error during iterative process | |
| maximum local relative error during iterative process | |
| real relative error | |
| maximum real relative error | |
| profile power factor | |
| rotor drag force or H-force | |
| tail rotor drag force | |
| ITNumb | number of iterations |
| fuselage lift force, | |
| Mach number, | |
| blade advancing Mach number at , | |
| blade advancing-tip Mach number, | |
| blade advancing-tip Mach number at hover, | |
| required power for forward flight | |
| maximum (available) take-off power | |
| rotor radius | |
| correlation coefficient | |
| Reynolds number, | |
| blade retreating Reynolds number at | |
| main rotor thrust | |
| rotor induced velocity | |
| , | rotor velocity with respect to the air or flight speed or true airspeed |
| minimum flight speed | |
| maximum flight speed | |
| flight speed increment | |
| local air velocity with respect to the fuselage, | |
| rotor tip speed, | |
| maximum take-off mass | |
| take-off mass | |
| airfoil angle of attack, | |
| airfoil zero-lift angle of attack | |
| rotor disc plane incidence angle or angle of attack, positive down for forward tilt | |
| minimum rotor disc plane incidence angle | |
| maximum rotor disc plane incidence angle | |
| fuselage angle of attack, positive down for forward tilt | |
| mast tilt, positive forward | |
| downwash angle produced at fuselage by the main rotor | |
| atmospheric (static) pressure ratio, , | |
| blade average profile drag coefficient without compressibility effect | |
| blade average profile drag coefficient with compressibility effect | |
| atmospheric (static) temperature ratio, , | |
| flight path angle, positive down | |
| relative error, stopping criteria | |
| average error [%] | |
| maximum error [%] | |
| rotor inflow ratio, or , positive down through disc | |
| initial value of rotor (induced) inflow ratio for numerical solution | |
| analytical solution of rotor inflow ratio for edgewise flight () | |
| initial value of rotor inflow ratio proposed by Wayne Johnson | |
| initial value of rotor inflow ratio proposed by Wayne Johnson—modified | |
| induced inflow ratio, | |
| rotor inflow ratio in hover | |
| rotor inflow ratio or induced inflow ratio numerically obtained by standard precision | |
| value from previous iteration | |
| high precision solution of rotor inflow ratio (benchmark solution) | |
| rotor advance ratio, | |
| rotor axial velocity ratio, or | |
| rotor velocity (with respect to the air) ratio, or | |
| air density | |
| air density according to the International Standard Atmosphere | |
| kinematic viscosity | |
| rotor solidity, | |
| minimum rotor solidity | |
| maximum rotor solidity | |
| mean rotor solidity | |
| rotor rotational speed | |
| nominal rotor rotational speed | |
| APR | acceptable parameter range |
| BERP | British Experimental Rotor Programme |
| CPU | central processing unit |
| CFD | computational fluid dynamics |
| CSD | computational structural dynamics |
| CG | control group |
| GIF | Glauert inflow formula |
| GPU | graphics processing unit |
| ISA | International Standard Atmosphere |
| MTOM | maximum take-off mass |
| MTOMmin | minimum value of maximum take-off mass |
| MTOMmax | maximum value of maximum take-off mass |
| NaN | not a number |
| NCP | numerical computational plan |
| NR | Newton–Raphson |
| NoF | number of failed convergence |
| PoF | percentage of failed convergence |
| RW | rotary wing |
| TOM | take-off mass |
| UAV | unmanned aerial vehicle |
| WG | working group |
| 1P2R | one-point two-order of convergence |
| 1P3R | one-point three-order of convergence |
| 1P4R | one-point four-order of convergence |
| 1P4R | one-point five-order of convergence |
| 2P4R | two-point five-order of convergence |
| 3P8R | three-point eight-order of convergence |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ) | ||
References
- Glauert, H. The Theory of the Autogyro. J. R. Aeronaut. Soc. 1927, 31, 483–508. [Google Scholar] [CrossRef]
- Peters, D.A. How Dynamic Inflow Survives in the Competitive World of Rotorcraft Aerodynamics. J. Am. Helicopter Soc. 2009, 54, 011001. [Google Scholar] [CrossRef] [Green Version]
- Smith, M.J.; Moushegian, A. Dual-Solver Hybrid Computational Approaches for Design and Analysis of Vertical Lift Vehicles. Aeronaut. J. 2022, 126, 187–208. [Google Scholar] [CrossRef]
- Chen, R.T. A survey of nonuniform inflow models for rotorcraft flight dynamics and control applications. In Proceedings of the Fifteenth European Rotorcraft Forum, Amsterdam, The Netherland, 12–15 September 1989. [Google Scholar]
- Peters, D.A.; Modarres, M.; Howard, A.B.; Rahming, B. A Third Approximation to Glauert’s Momentum Theory. J. Am. Helicopter Soc. 2016, 61, 042007. [Google Scholar] [CrossRef]
- Rubin, R.L.; Zhao, D. New Development of Classical Actuator Disk Model for Propellers at Incidence. AIAA J. 2021, 59, 1040–1054. [Google Scholar] [CrossRef]
- Petrovic, Z.; Stupar, S.; Kostic, I.; Simonovic, A. Determination of a Light Helicopter Flight Performance at the Preliminary Design Stage. Stroj. Vestn. J. Mech. Eng. 2010, 56, 535–543. [Google Scholar]
- Traub, J.F. Iterative Methods for the Solution of Equations, 2nd ed.; Chelsea Publishing Company: New York, NY, USA, 1982. [Google Scholar]
- Petkovic, M.S.; Neta, B.; Petkovic, L.; Dzunic, J. Multipoint Methods for Solving Nonlinear Equations, 1st ed.; Elsevier Science Publishing Co., Inc.: San Diego, CA, USA, 2014; ISBN 9780123972989. [Google Scholar]
- Dzunic, J. Multipoint Methods for Solving Nonlinear Equations. Ph.D. Thesis, University of Nis, Nis, Serbia, 2012. [Google Scholar]
- Petkovic, M.S.; Neta, B.; Petkovic, L.; Dzunic, J. Multipoint methods for solving nonlinear equations: A survey. Appl. Math. Comput. 2014, 226, 635–660. [Google Scholar] [CrossRef] [Green Version]
- Berahas, A.S.; Jahani, M.; Richtárik, P.; Takáč, M. Quasi-Newton methods for machine learning: Forget the past, just sample. Optim. Methods Softw. 2022, 37, 1668–1704. [Google Scholar] [CrossRef]
- Goldfarb, D.; Ren, Y.; Bahamou, A. Practical quasi-newton methods for training deep neural networks. Adv. Neural Inf. Process. Syst. 2020, 33, 2386–2396. [Google Scholar] [CrossRef]
- Davis, K.; Schulte, M.; Uekermann, B. Enhancing Quasi-Newton Acceleration for Fluid-Structure Interaction. Math. Comput. Appl. 2022, 27, 40. [Google Scholar] [CrossRef]
- Bogaers, A.E.J.; Kok, S.; Reddy, B.D.; Franz, T. Quasi-Newton methods for implicit black-box FSI coupling. Comput. Methods Appl. Mech. Eng. 2014, 279, 113–132. [Google Scholar] [CrossRef] [Green Version]
- Akbari, A.; Giannacopoulos, D. An efficient multi-threaded Newton–Raphson algorithm for strong coupling modeling of multi-physics problems. Comput. Phys. Commun. 2021, 258, 107563. [Google Scholar] [CrossRef]
- Liu, L.; Zhang, H.; Wu, Y.; Liu, B.; Guo, J.; Li, F. A modified JFNK with line search method for solving k-eigenvalue neutronics problems with thermal-hydraulics feedback. Nucl. Eng. Technol. 2023, 55, 310–323. [Google Scholar] [CrossRef]
- Ganguli, R.A. Pedagogical Example for STEM Using the Glauert Inflow Equation, Mathematica and Python. In Proceedings of the AIAA SciTech Forum, San Diego, CA, USA, 7–11 January 2019. [Google Scholar] [CrossRef]
- Bronshtein, I.N.; Semendyayev, K.A.; Musiol, G.; Muehlig, H. Handbook of Mathematics, 5th ed.; Springer: Berlin/Heidelberg, Germany, 2007; ISBN 978-3-540-72121-5. [Google Scholar]
- Leishman, G.J. Principles of Helicopter Aerodynamics, 2nd ed.; Cambridge University Press: Cambridge, UK, 2006. [Google Scholar]
- Johnson, W. Rotorcraft Aeromechanics; Cambridge University Press: New York, NY, USA, 2013. [Google Scholar]
- Johnson, W. NDARC—NASA Design and Analysis of Rotorcraft: Theory; Appendix 3, Release 1.11; TP–2015-218751; National Aeronautics and Space Administration: Washington, DC, USA, 2016.
- Rand, O.; Khromov, V. Helicopter Sizing by Statistics. J. Am. Helicopter Soc. 2004, 49, 300–317. [Google Scholar] [CrossRef]
- Harris, F.D. Introduction to Autogyros, Helicopters, and Other V/STOL Aircraft, Volume II: Helicopters; National Aeronautics and Space Administration: Washington, DC, USA, 2012.
- Prouty, R. Helicopter Performance, Stability and Control, 2nd ed.; Krieger Publishing Company: Malabar, FL, USA, 2002. [Google Scholar]
- Keys, C.N.; Wiesner, R. Guidelines for Reducing Helicopter Parasite Drag; Boeing Vertol Company: Ridley Park, PA, USA, 1974. [Google Scholar]
- Bramwell, A.R.S.; Done, G.; Balmford, D. Bramwell’s Helicopter Dynamics, 2nd ed.; Butterworth-Heinemann: Oxford, UK, 2000. [Google Scholar]
- Harris, F.D. Rotor Performance at High Advance Ratio: Theory versus Test; NASA/CR-2008-215370; National Aeronautics and Space Administration: Washington, DC, USA, 2008.
- Harris, F.D. Rotary Wing Aerodynamics—Historical Perspective and Important Issues. In Proceedings of the American Helicopter Society National Specialist’s Meeting on Aerodynamics and Aeroacoustics, Arlington, TX, USA, 25–27 February 1987. [Google Scholar]
- McCroskey, W.J. A Critical Assessment of Wind Tunnel Results for the NACA 0012 Airfoil; NASA-TM-100019; National Aeronautics and Space Administration: Washington, DC, USA, 1987.
- Bezanson, J.; Edelman, A.; Karpinski, S.; Shah, V.B. Julia: A Fresh Approach to Numerical Computing. SIAM Rev. 2017, 59, 65–98. [Google Scholar] [CrossRef] [Green Version]
- Sharma, J.R.; Sharma, R. A new family of modified Ostrowski’s methods with accelerated eighth order convergence. Numer. Algor. 2010, 54, 445–458. [Google Scholar] [CrossRef]
- Lau, B.H.; Louie, A.W.; Griffiths, N.; Sotiriou, C.P. Performance and Rotor Loads Measurements of the Lynx XZ170 Helicopter with Rectangular Blades; NASA-TM-104000; National Aeronautics and Space Administration: Washington, DC, USA, 1993.
- Dodic, M.; Krstic, B.B.; Rasuo, B.P. Single Rotor Helicopter Parasite Drag Estimation in the Preliminary Design Stage. Tehnika 2018, 73, 65–77. [Google Scholar] [CrossRef] [Green Version]
- Bailey, F.J., Jr. A Simplified Theoretical Method of Determining the Characteristics of a Lifting Rotor in Forward Flight; NACA Report 716; US Government Printing Office: Washington, DC, USA, 1941.
- Lau, B.H.; Louie, A.W.; Griffiths, N.; Sotiriou, C.P. Correlation of the Lynx-XZ170 Flight-Test Results Up to and Beyond the Stall Boundary. In Proceedings of the AHS Forum 49, St. Louis, MO, USA, 19–21 May 1993. [Google Scholar]
- Totah, J. A Critical Assessment of UH-60 Main Rotor Blade Airfoil Data; NASA-TM-103985; National Aeronautics and Space Administration: Washington, DC, USA, 1993.
- Yamauchi, G.K.; Johnson, W. Trends of Reynolds Number Effects on Two-Dimensional Airfoil Characteristics for Helicopter Rotor Analyses; NASA-TM-84363; National Aeronautics and Space Administration: Washington, DC, USA, 1983.
- Rasuo, B. The influence of Reynolds and Mach numbers on two-dimensional wind-tunnel testing: An experience. Aeronaut. J. 2011, 115, 1166. [Google Scholar] [CrossRef]
- Rasuo, B. Scaling between Wind Tunnels–Results Accuracy in Two-Dimensional Testing. Trans. Jpn. Soc. Aeronaut. Space Sci. 2012, 55, 109–115. [Google Scholar] [CrossRef] [Green Version]




















| Constant | ||
|---|---|---|
| Main Inflow Ratio Equations (5) and (6) | Induced Inflow Ratio , Equations (2) and (3) | Reference |
|---|---|---|
| Leishman [20] | ||
| W. Johnson [15,16] | ||
| Current study |
| Characteristics | Group 1 | Group 2 | Group 3 | Group 4 | |
|---|---|---|---|---|---|
| MTOMmin/Δm/MTOMmax 1 | WG | 1000/500/8500 | 9000/2000/19,000 | 20,000/5000/35,000 | 40,000/10,000/80,000 |
| CG | 1000/200/8800 | 9000/400/19,600 | 20,000/800/40,000 | 41,600/1600/80,000 | |
| hmin/Δh/hmax | 0/500/11,500 | ||||
| fe,max/fe,mean/fe,min | Calculated based on [21,22,23,24,25,26] | ||||
| Vmin/ΔV/Vmax | 1/1/131 | ||||
| σmin/σmean/σmax | 0.04/0.01/0.2 | ||||
| amin/amax | 130/150 | ||||
| bmin/bmax | 0.85/1.15 | ||||
| kmin/kmax | 0.39/1.35 | ||||
| No. of WG points | 3,621,888 | 1,358,208 | 905,472 | 1,131,840 | |
| No. of CG points | 32,823,360 | 22,155,768 | 21,335,184 | 20,514,600 | |
| Total No. of WG points: | 7,017,408 | Total No. of CG points: | 96,828,912 | ||
| Reference | ||
|---|---|---|
| Vast literature | ||
| [28] | ||
| 1.2 | Current study | |
| Cycle No. | Group | Model | Cycle No. | Group | Model |
|---|---|---|---|---|---|
| 1. | WG 1–4 | No limit | 5. | WG 1–4 | Power 2 limit |
| 2. | WG 1–4 | Power limit | 6. | WG 1–4 | Power 3 limit |
| 3. | WG 1–4 | Dynamic stall | 7. | CG 1–4 | No limit |
| 4. | WG 1–4 | Power 1 limit |
| Methods | Type | Stopping Criteria | Equations | |
|---|---|---|---|---|
| Halley | 1P3R | Equation (6) | ||
| Chebyshev | 1P3R | Equation (5) | ||
| Kiss | 1P4R | Equation (3) | ||
| E5 | 1P5R | Equation (2) | ||
| NR | 1P2R | |||
| NR with f = 0.5 | - | |||
| Ostrowski | 2P4R | |||
| Chun | 2P4R | 1 iteration | ||
| Cordero | 2P4R | |||
| Jarratt | 2P4R | |||
| Sharma–Sharma | 3P8R | |||
| BWR | 3P8R | |||
| BWR II | 3P8R | |||
| KT | 3P8R |
| n | One-Point Methods | Two-Point Methods | Three-Point Methods | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Halley | Chebyshev | Kiss | E5 | Ostrowski | Chun | Cordero | Jarrat | Sharma | BWR | BWR II | KT Diff | ||
| 16 | 2.16 | 2.15 | 2.15 | 2.15 | 0.76 | 12.39 | 12.84 | 2.15 | 1.62 | 2.68 | 1.28 | 1.75 | |
| 14 | 0 | 0 | 0 | 0 | 1 × 10−4 | 6 × 10−3 | 6 × 10−3 | 0 | 0.015 | 0 | 0.037 | 0.04 | |
| 12 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 2 × 10−4 | 0 | 0.024 | 0.002 | |
| 10 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.017 | 0 | |
| 8 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.2 × 10−4 | 0 | |
| 6 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 5.9 × 10−5 | 0 | |
| 4 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 9.8 × 10−6 | 0 | |
| 16 | 2.12 | 2.08 | 2.10 | 2.11 | 0.63 | 13.69 | 14.13 | 2.1 | 1.68 | 2.71 | 1.20 | 2.37 | |
| 14 | 0 | 0 | 0 | 0 | 5 × 10−5 | 5 × 10−3 | 5 × 10−3 | 0 | 0.012 | 0 | 0.05 | 0.032 | |
| 12 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 5 × 10−5 | 0 | 0.024 | 0.002 | |
| 10 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.07 | 2 × 10−5 | |
| 8 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0015 | 0 | |
| 6 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 7.3 × 10−6 | 0 | |
| 4 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 3 × 10−6 | 0 | |
| 16 | 2.11 | 2.11 | 2.11 | 2.11 | 0.64 | 13.60 | 13.95 | 2.1 | 1.77 | 2.69 | 1.21 | 2.55 | |
| 14 | 0 | 0 | 0 | 0 | 5 × 10−5 | 4 × 10−3 | 3 × 10−3 | 0 | 0.008 | 0 | 0.04 | 0.033 | |
| 12 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 7 × 10−5 | 0 | 0.032 | 0.001 | |
| 10 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.027 | 2 × 10−5 | |
| 8 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.0223 | 0 | |
| 6 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.3 × 10−4 | 0 | |
| 4 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 10−5 | 0 | |
| n | Two-Point Methods | Three-Point Methods | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Ostr. | Chun | Cord. | Jarr. | Sh.Sh. | BWR | BWR II | KT | ||
| 16 | 0.003 | 0.095 | 0.628 | 0 | 0 | 0 | 0.0015 | 0.0015 | |
| 14 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| 16 | 0.006 | 0.118 | 0.771 | 0 | 0 | 0 | 0.0021 | 0.001 | |
| 14 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| 16 | 0.006 | 0.087 | 0.571 | 0 | 0 | 0 | 0.0028 | 0.0015 | |
| 14 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dodic, M.; Krstic, B.; Rasuo, B.; Dinulovic, M.; Bengin, A. Numerical Analysis of Glauert Inflow Formula for Single-Rotor Helicopter in Steady-Level Flight below Stall-Flutter Limit. Aerospace 2023, 10, 238. https://doi.org/10.3390/aerospace10030238
Dodic M, Krstic B, Rasuo B, Dinulovic M, Bengin A. Numerical Analysis of Glauert Inflow Formula for Single-Rotor Helicopter in Steady-Level Flight below Stall-Flutter Limit. Aerospace. 2023; 10(3):238. https://doi.org/10.3390/aerospace10030238
Chicago/Turabian StyleDodic, Marjan, Branimir Krstic, Bosko Rasuo, Mirko Dinulovic, and Aleksandar Bengin. 2023. "Numerical Analysis of Glauert Inflow Formula for Single-Rotor Helicopter in Steady-Level Flight below Stall-Flutter Limit" Aerospace 10, no. 3: 238. https://doi.org/10.3390/aerospace10030238