
A Line Segment Detector for Space Target Images Robust to Complex Illumination


Abstract
:1. Introduction
2. Methods
2.1. Overview of ST_LSD
2.2. Noise Removal Method Combined with Adaptive Bilateral Filtering
2.3. Anchor Map Extraction Method Combined with Improved Otsu
| Algorithm 1 Improved Otsu method |
| Input: The gray image f; Initialization parameter. Output: Otsu segmentation result image O. Step1: median filtering. Step2: construct the 2D histogram using median image M and median-average image A. Step3: calculate the between-class variance Tr. for i = 0 to 256 do for j = 0 to 256 do Tr ← Step4: calculate the optimal threshold for maximizing the between-class variance. if (Tr > maxvariance) then maxvariance ←Tr Trthreshold_s ← i ithreshold_t ← j end end end T ← threshold_s return T Step5: segment the image by the threshold value T. ShowImage O. |
| Algorithm 2 Anchor map extraction method combined with improved Otsu |
| Input: The image I processed by the improved Otsu method; the gradient orientation tolerance μ. Output: Effective anchors Ae. Step1: calculate the gradient magnitude Gm and gradient orientation Go of pixel P(x, y); the center pixel of the neighborhood of pixel P(x, y) is Gp; the interpolation of two gradient amplitudes along the gradient orientation is Gp1 and Gp2, respectively; output the general anchors Ag. if Gp ≥ Gp1 and Gp ≥ Gp2 then Ag ← Gp else Gp ← 0 end if return Ag Step2: verify the general anchors and obtain effective anchors Ae; the gradient orentation of the general anchors Ag is Gg. if Gg is horizontal then for pixel P(x, y) in {(x, ya) y−1 ≤ ya ≤ y+1, ya∈N} do if angdiff (Gg (x, y), Gg (x, ya)) < μ than Ae ← true else Ae ← false end if end for end if return Ae |
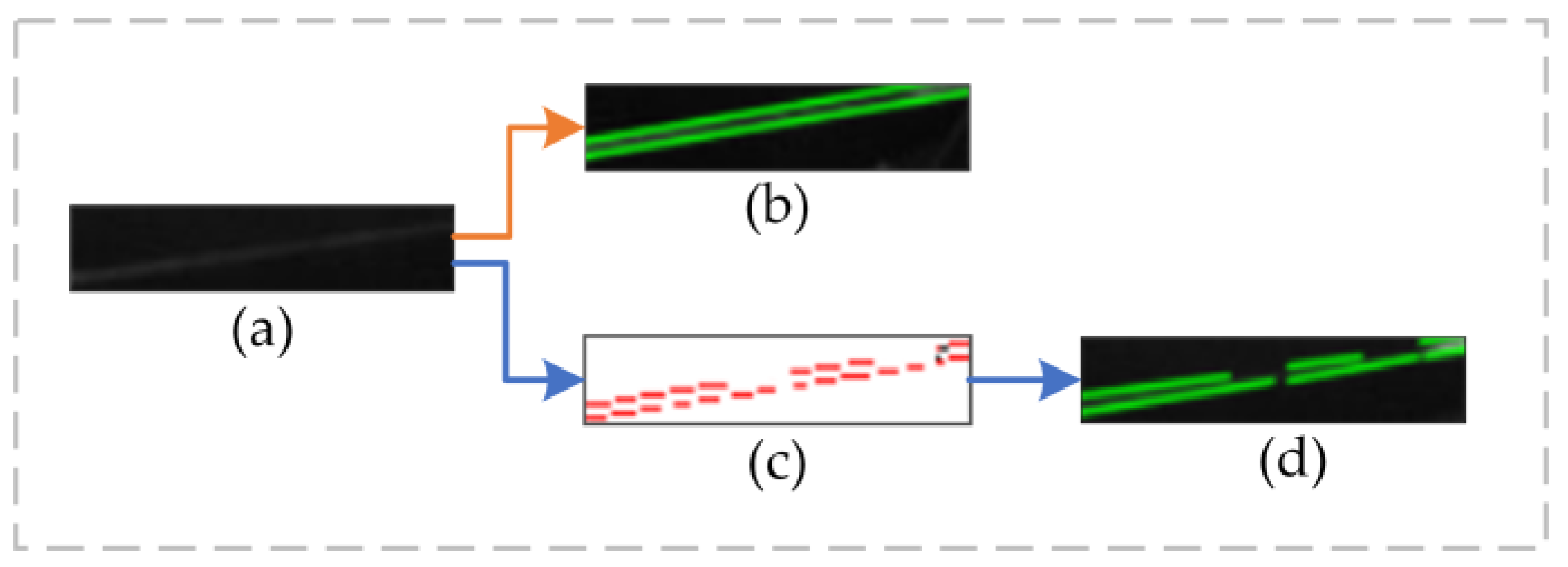
2.4. Line Segment Validation and Aggregation
3. Results
3.1. Evaluation Metrics
3.2. Dataset Description
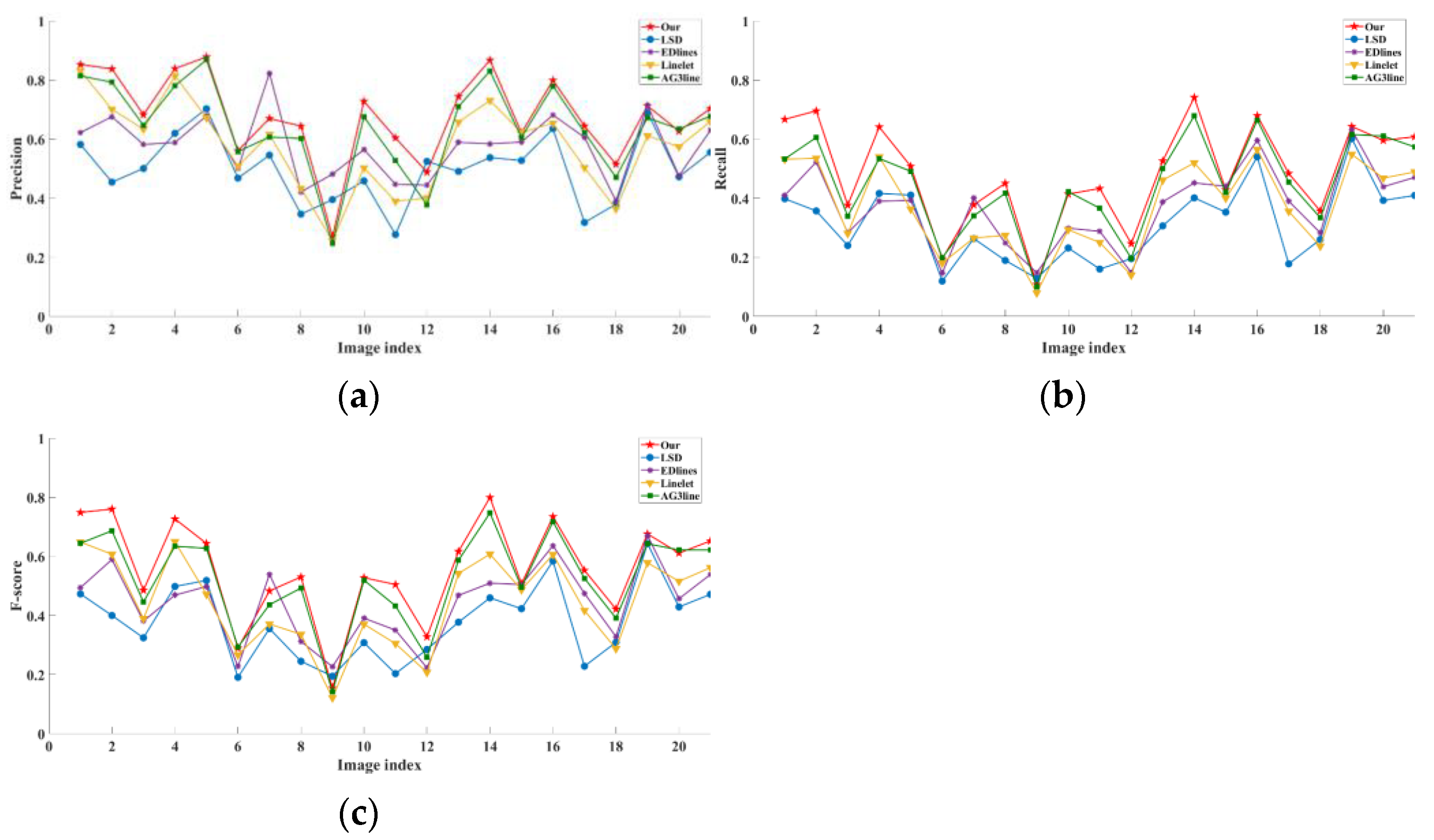
3.3. Quantitative Evaluation Results
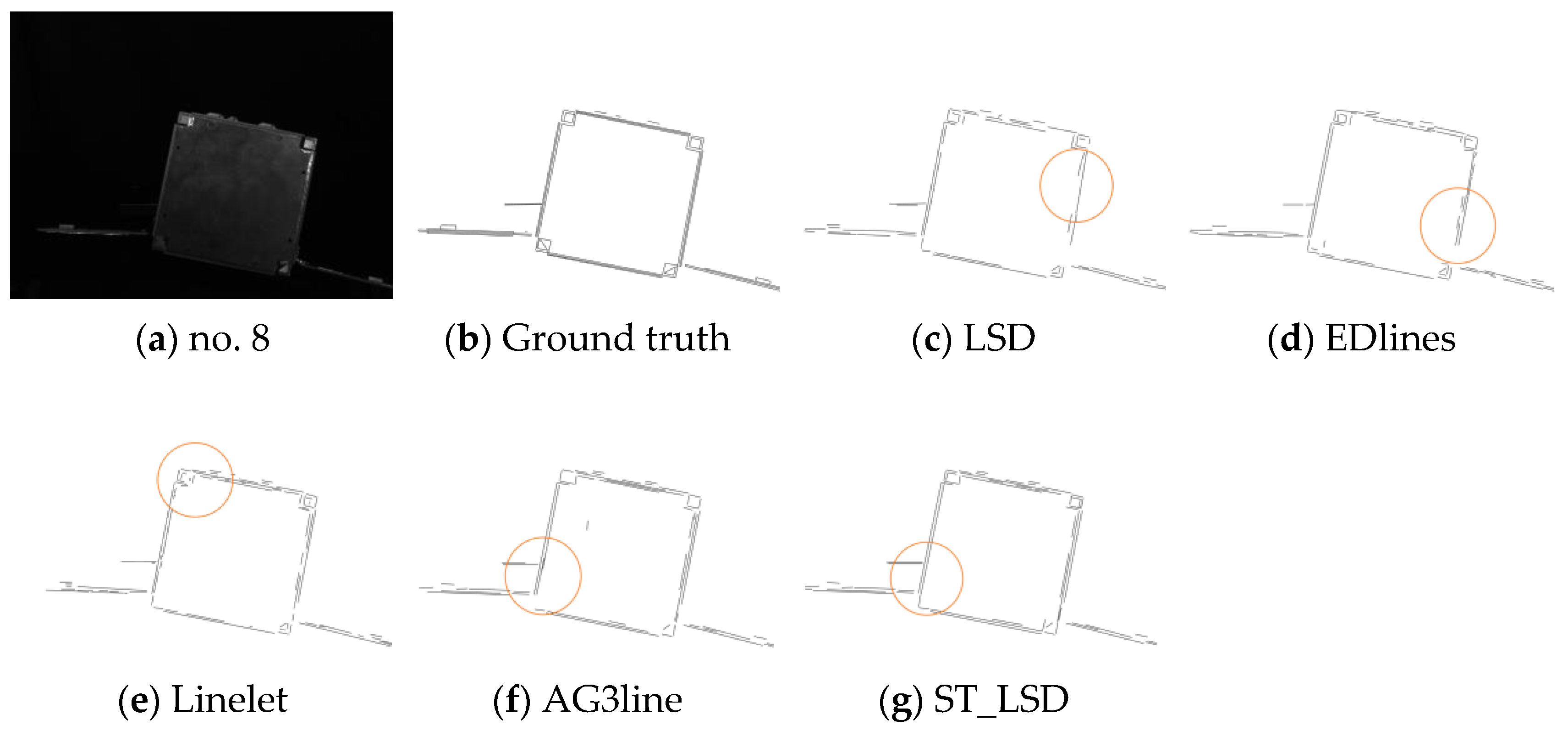
3.4. Qualitative Comparison
4. Discussion
4.1. Parameter Settings
- 1.
- Suppressing image noise: in Section 2.2, the image is filtered by using an adaptive bilateral filter with a filter window.
- 2.
- Gradient orientation tolerance: in Section 2.3, following the LSD [21] method, two pixels’ gradient orientations are aligned when the difference between their angles is smaller than .
- 3.
- Angle difference threshold: in Section 2.4, following the LSM [29] method, the coefficients in the angle difference threshold are set as , , and .
- 4.
- Endpoint distance threshold: in Section 2.4, , and the algorithm has the best effect in the experiment.
4.2. The Complexity of ST_LSD
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Cassinis, L.P.; Fonod, R.; Gill, E.; Ahrns, I.; Fernandez, J.G. CNN-Based Pose Estimation System for Close-Proximity Operations Around Uncooperative Spacecraft. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020; pp. 1–16. [Google Scholar]
- Chen, B.; Cao, J.W.; Parra, A.; Chin, T.J. Satellite pose estimation with deep landmark regression and nonlinear pose refinement. In Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision Workshop, Seoul, Korea, 27–28 October 2019; pp. 2816–2824. [Google Scholar]
- Huo, Y.; Li, Z.; Zhang, F. Fast and accurate spacecraft pose estimation from single shot space imagery using box reliability and keypoints existence judgments. IEEE Access 2020, 8, 216283–216297. [Google Scholar] [CrossRef]
- Kendall, A.; Grimes, M.; Cipolla, R. Posenet: A convolutional network for real-time 6-dof camera relocalization. In Proceedings of the 2015 IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 2938–2946. [Google Scholar]
- Sharma, S.; D’Amico, S. Neural network-based pose estimation for noncooperative spacecraft rendezvous. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 4638–4658. [Google Scholar] [CrossRef]
- Proença, P.F.; Gao, Y. Deep Learning for Spacecraft Pose Estimation from Photorealistic Rendering. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 6007–6013. [Google Scholar]
- Gupta, K.; Petersson, L.; Hartley, R. Cullnet: Calibrated and pose aware confidence scores for object pose estimation. In Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision Workshop, Seoul, Korea, 27–28 October 2019; pp. 2758–2766. [Google Scholar]
- Song, J.; Rondao, D.; Aouf, N. Deep learning-based spacecraft relative navigation methods: A survey. Acta Astronaut. 2022, 191, 22–40. [Google Scholar] [CrossRef]
- Yu, P.; Wang, C.; Wang, Z.; Yu, J.; Kneip, L. Accurate line-based relative pose estimation with camera matrices. IEEE Access 2020, 8, 88294–88307. [Google Scholar] [CrossRef]
- Lin, B.; Zhong, L.; Sheng, Z.; Yang, X.; Yang, Y.; Wang, K.; Zhang, X. A New Pattern for Detection of Streak-Like Space Target from Single Optical Images. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–13. [Google Scholar] [CrossRef]
- Wang, D.; Liu, Q.; Yin, Q.; Ma, F. Fast Line Segment Detection and Large Scene Airport Detection for PolSAR. Remote Sens. 2022, 14, 5842. [Google Scholar] [CrossRef]
- Liu, N.; Cui, Z.; Cao, Z.; Pi, Y.; Dang, S. Airport detection in large-scale SAR images via line segment grouping and saliency analysis. IEEE Geosci. Remote Sens. Lett. 2018, 15, 434–438. [Google Scholar] [CrossRef]
- Tang, G.; Xiao, Z.; Liu, Q.; Liu, H. A novel airport detection method via line segment classification and texture classification. IEEE Geosci. Remote Sens. Lett. 2015, 12, 2408–2412. [Google Scholar] [CrossRef]
- Jia, X.; Huang, X.; Zhang, F.; Gao, Y.; Yang, C. Robust Line Matching for Image Sequences Based on Point Correspondences and Line Mapping. IEEE Access 2019, 7, 39879–39896. [Google Scholar] [CrossRef]
- Chia, A.Y.; Rajan, D.; Leung, M.K.; Rahardja, S. Object recognition by discriminative combinations of line segments, ellipses, and appearance features. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 1758–1772. [Google Scholar] [CrossRef]
- Luo, Y.T.; Zhao, L.Y.; Zhang, B.; Jia, W.; Xue, F.; Lu, J.T.; Zhu, Y.H.; Xu, B.Q. Local line directional pattern for palmprint recognition. Pattern Recognit. 2016, 50, 26–44. [Google Scholar] [CrossRef]
- Hofer, M.; Maurer, M.; Bischof, H. Efficient 3D scene abstraction using line segments. Comput. Vis. Image Understand 2017, 157, 167–178. [Google Scholar] [CrossRef]
- Zhong, L.; Qin, J.; Yang, X.; Zhang, X.; Shang, Y.; Zhang, H.; Yu, Q. An Accurate Linear Method for 3D Line Reconstruction for Binocular or Multiple View Stereo Vision. Sensors 2021, 21, 658. [Google Scholar] [CrossRef] [PubMed]
- Ballard, D.H. Generalizing the Hough transform to detect arbitrary shapes. Pattern Recognit. 1981, 13, 111–122. [Google Scholar] [CrossRef] [Green Version]
- Kiryati, N.; Eldar, Y.; Bruckstein, A.M. A probabilistic Hough transform. Pattern Recognit. 1991, 24, 303–316. [Google Scholar] [CrossRef]
- Galamhos, C.; Matas, J.; Kittler, J. Progressive probabilistic Hough transform for line detection. CVPR 1999, 1, 554–560. [Google Scholar]
- Xu, L.; Oja, E.; Kultanen, P. A new curve detection method: Randomized Hough transform (RHT). Pattern Recognit. Lett. 1990, 11, 331–338. [Google Scholar] [CrossRef]
- Fernandes, L.A.F.; Oliveira, M.M. Real-time line detection through an improved Hough transform voting scheme. Pattern Recognit. 2008, 41, 299–314. [Google Scholar] [CrossRef]
- Du, S.; Tu, C.; Van Wyk, B.J.; Chen, Z. Collinear segment detection using HT neighborhoods. IEEE Trans. Image Process. 2011, 20, 3612–3620. [Google Scholar]
- Almazan, E.J.; Tal, R.; Qian, Y.; Elder, J.H. MCMLSD: A dynamic programming approach to line segment detection. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; Volume 10, pp. 5854–5862. [Google Scholar]
- Burns, J.B.; Hanson, A.R.; Riseman, E.M. Extracting straight lines. IEEE Trans. Pattern Anal. Mach. Intell. 1986, 8, 425–455. [Google Scholar] [CrossRef]
- Desolneux, A.; Moisan, L.; Morel, J.M. Meaningful alignments. Int. J. Comput. Vis. 2000, 40, 7–23. [Google Scholar] [CrossRef]
- Lu, X.; Yao, J.; Li, L.; Liu, Y.; Zhang, W. Edge chain detection by applying Helmholtz principle on gradient magnitude map. In Proceedings of the 2016 23rd International Conference on Pattern Recognition, Cancun Center, Cancun, Mexico, 4–8 December 2016; pp. 1364–1369. [Google Scholar]
- Gioi, R.G.V.; Jakubowicz, J.; Morel, J.M.; Randall, G. LSD: A fast line segment detector with a false detection control. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 32, 722–732. [Google Scholar] [CrossRef]
- Akinlar, C.; Topal, C. EDLines: A real-time line segment detector with a false detection control. Pattern Recognit. Lett. 2011, 32, 1633–1642. [Google Scholar] [CrossRef]
- Topal, C.; Akinlar, C. Edge Drawing: A combined real-time edge and segment detector. J. Visual Commun. Image Represent. 2012, 23, 862–872. [Google Scholar] [CrossRef]
- Akinlar, C.; Topal, C. EDPF: A real-time parameter-free edge segment detector with a false detection control. Int. J. Pattern Recogn. 2012, 26, 1–22. [Google Scholar] [CrossRef]
- Wang, Y.; Yu, L.; Xie, H.; Lei, T.; Guo, Z.; Qi, M. Line detection algorithm based on adaptive gradient threshold and weighted mean shift. Multimed. Tools. Appl. 2016, 75, 16665–16682. [Google Scholar] [CrossRef]
- Lu, X.; Yao, J.; Li, K.; Li, L. CannyLines: A parameter-free line segment detector. In Proceedings of the 2015 IEEE International Conference on Image Processing, Quebec City, QC, Canada, 27–30 September 2015; pp. 507–511. [Google Scholar]
- Salaun, Y.; Marlet, R.; Monasse, P. Multiscale line segment detector for robust and accurate SfM. In Proceedings of the IEEE 2016 23rd International Conference on Pattern Recognition, Cancun Center, Cancun, Mexico, 4–8 December 2016; pp. 2000–2005. [Google Scholar]
- Yu, Q.; Xu, G.; Cheng, Y.; Zhu, Z. PLSD: A Perceptually Accurate Line Segment Detection Approach. IEEE Access 2020, 8, 42595–42607. [Google Scholar] [CrossRef]
- Hamid, N.; Khan, N. LSM: Perceptually accurate line segment merging. J. Electron Imaging. 2016, 25, 1–12. [Google Scholar] [CrossRef]
- Cho, N.G.; Yuille, A.; Lee, S.W. A novel linelet-based representation for line segment detection. IEEE Trans. Pattern Anal. Mach. Intell. 2018, 40, 1195–1208. [Google Scholar] [CrossRef]
- Liu, Y.; Xie, Z.; Liu, H. LB-LSD: A length-based line segment detector for real-time applications. Pattern Recognit. Lett. 2019, 128, 247–254. [Google Scholar] [CrossRef]
- Liu, Y.; Xie, Z.; Liu, H. An Adaptive and Robust Edge Detection Method Based on Edge Proportion Statistics. IEEE Trans. Image Process. 2020, 29, 5206–5215. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Wei, D.; Li, Y. AG3line: Active Grouping and Geometry-Gradient Combined Validation for Fast Line Segment Extraction. Pattern Recognit. 2021, 113, 1–11. [Google Scholar] [CrossRef]
- Proietti, A.; Panella, M.; Leccese, F.; Svezia, E. Dust detection and analysis in museum environment based on pattern recognition. Measurement 2015, 66, 62–72. [Google Scholar] [CrossRef]
- Gavaskar, R.G.; Chaudhury, K.N. Fast Adaptive Bilateral Filtering. IEEE Trans. Image Process. 2019, 28, 779–790. [Google Scholar] [CrossRef] [Green Version]
- Chen, Q.; Zhao, L.; Kuang, G.; Wang, N.; Jiang, Y. Modified two-dimensional Otsu image segmentation algorithm and fast realization. IET Image Process. 2012, 6, 426–433. [Google Scholar] [CrossRef]
- Huang, L.; Fang, Y.; Zuo, X.; Yu, X. Automatic Change Detection Method of Multitemporal Remote Sensing Images Based on 2D-Otsu Algorithm Improved by Firefly Algorithm. J. Sensors. 2015, 3, 1–8. [Google Scholar] [CrossRef] [Green Version]
- LSD Web Site. Available online: http://www.ipol.im/pub/art/2012/gjmr-lsd (accessed on 5 March 2022).
- EDLines Web Site. Available online: http://ceng.anadolu.edu.tr/cv/EDLines (accessed on 6 March 2022).
- Linelet Web Site. Available online: https://github.com/NamgyuCho (accessed on 14 March 2022).
- AG3line Web Site. Available online: https://github.com/weidong-whu/AG3line (accessed on 3 April 2022).
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Precision | Recall | F-Score | Time/ms |
|---|---|---|---|---|
| LSD | 0.4994 | 0.3123 | 0.3773 | 43.76 |
| EDlines | 0.5761 | 0.3700 | 0.4424 | 47.23 |
| Linelet | 0.5782 | 0.3696 | 0.4453 | - |
| AG3line | 0.6432 | 0.4476 | 0.5222 | 27.88 |
| ST_LSD | 0.6807 | 0.4847 | 0.5598 | 33.37 |
| Algorithm Image | LSD | EDlines | Linelet | AG3line | ST_LSD | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| #3 | #8 | #21 | Mean | #3 | #8 | #21 | Mean | #3 | #8 | #21 | Mean | #3 | #8 | #21 | Mean | #3 | #8 | #21 | Mean | |
| Precision | 0.5 | 0.35 | 0.56 | 0.47 | 0.58 | 0.42 | 0.63 | 0.54 | 0.63 | 0.43 | 0.66 | 0.57 | 0.64 | 0.6 | 0.68 | 0.64 | 0.68 | 0.64 | 0.7 | 0.67 |
| Recall | 0.24 | 0.19 | 0.41 | 0.28 | 0.28 | 0.25 | 0.47 | 0.33 | 0.28 | 0.27 | 0.49 | 0.35 | 0.34 | 0.42 | 0.57 | 0.44 | 0.38 | 0.45 | 0.61 | 0.48 |
| F-score | 0.32 | 0.25 | 0.47 | 0.25 | 0.38 | 0.31 | 0.54 | 0.41 | 0.39 | 0.34 | 0.56 | 0.43 | 0.44 | 0.49 | 0.62 | 0.52 | 0.49 | 0.53 | 0.65 | 0.56 |
| Time(ms) | 36.8 | 35.1 | 51.8 | 41.2 | 41.6 | 38.6 | 58.3 | 46.2 | - | - | - | - | 25.2 | 23.4 | 35.3 | 28.0 | 29.1 | 28.3 | 42.4 | 33.3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Hu, C.; Liu, H.; Du, R.; Zhou, X.; Wang, L. A Line Segment Detector for Space Target Images Robust to Complex Illumination. Aerospace 2023, 10, 195. https://doi.org/10.3390/aerospace10020195
Zhang X, Hu C, Liu H, Du R, Zhou X, Wang L. A Line Segment Detector for Space Target Images Robust to Complex Illumination. Aerospace. 2023; 10(2):195. https://doi.org/10.3390/aerospace10020195
Chicago/Turabian StyleZhang, Xingxing, Changyu Hu, Hanhan Liu, Ronghua Du, Xiaofeng Zhou, and Ling Wang. 2023. "A Line Segment Detector for Space Target Images Robust to Complex Illumination" Aerospace 10, no. 2: 195. https://doi.org/10.3390/aerospace10020195