1. Introduction
Runways have always been recognized as the bottleneck area of airport systems (Bennell, et al., 2013; Bennell, et al., 2017) [
1,
2]. Along with the continuous advancement of new runway renovation and expansion projects, as well as the iterative evolutionary development of theoretical approaches such as runway operation mode configuration and runway arrival and departure schedules, runway operation efficiency has been effectively improved (Ramanujam, et al., 2015; Samà, et al., 2017; Yin, et al., 2021) [
3,
4,
5]. However, orderly and efficient runway take-off and landing aircraft flows are frequently subject to surface conflicts, congestion, and delays due to the constraints of apron-operational performance, aggravating the fuel consumption and gas emissions during the aircraft ground taxiing waiting process, which makes the safety and efficiency of the apron area a growing concern in the air transport industry and academia.
The apron is the core operating area of the civil airport system, and its operation involves “operators-aircraft-vehicles”, covering “airport-air traffic control-airline”, and multi-level business entities, serving “passengers-cargo”. In the apron areas of large airports, the conflict between the highly intensive arrival and departure traffic and the relatively limited apron capacity is becoming more pronounced, resulting in low levels of safety and efficiency in aircraft operations. From the perspective of airport ground service coordination, inefficient and disruptive aircraft operations further constrain the efficiency of the coordinated dispatch of operators and vehicles. In this context, how to adopt scientific means to optimize the design of apron operation procedures, scientifically evaluate the performance of apron operations, and enhance the safety, efficiency, and greenness of apron operations as far as possible has become a key challenge that needs to be addressed.
2. Literature Review
At present, many studies have been carried out at home and abroad in the field of airport surface operation optimization, mainly focusing on airport surface traffic operation modeling, airport surface performance index analysis, and airport surface resource optimization scheduling.
In terms of airport surface traffic operation modeling, most recent studies have extracted the traffic characteristics of the airport surface and adopted the theory of Cellular Automata (CA): elements such as taxiways, aprons, and runways are considered as cellular space, and a cellular transport model of the traffic flow on the surface is established for simulation and deduction in order to clarify the spatial and temporal evolution law of the traffic flow on the surface (Xing, et al., 2018; Xue, et al., 2020; Yang, et al., 2016) [
6,
7,
8]. In some studies, a directed topological network model was used in establishing the operational environment of the airport surface, the neighborhood relationships of the structural elements of the airport surface were described using “nodes-segments”, and the static properties and dynamic response behavior of the airport surface traffic system were studied based on Petri net modeling (Lu, et al., 2021; Pan, et al., 2018) [
9,
10]. Mathematical models based on queuing theory for aircraft runway departure queuing and ground protection have been established to achieve the prediction and optimization of key time nodes for aircraft surface operations (Chen, et al., 2019; Feng, et al., 2016) [
11,
12]. Min considered the macro- and micro-effects of aircraft ground traffic flow arrival time separation distribution on airport operations and constructed a slowing probability model [
13]. Fines treated a single aircraft as an agent and developed a simulation model of airport surface operations based on a multiple-agent system [
14].
In terms of analysis of airport surface performance indices, most studies focus on the performance domains of safety, capacity, and efficiency. Marin used a weighted linear objective function to balance multiple types of conflict indices [
15]. According to Zhang and Zhao, multi-scenario-oriented surface capacity assessment and prediction models were developed considering the influence of meteorology, traffic, and airspace on the surface capacity, respectively [
16,
17]. Simaiakis extracted taxiing durations and flight flows at different levels of airport surface congestion and studied the effect of congestion on the aircraft taxiing process [
18]. Xie and Wang analyzed the interactions between airport surface operation indices and assigned weights to the indices using hierarchical analysis and a topologically integrated evaluation method [
19,
20]. In addition, a method of modeling and analysis of situational indices based on the macro-distribution network of the airport surface was constructed from the multidimensional perspective of surface traffic flow, take-off, landing queue length, and time slot resource demand, providing a theoretical basis for accurate perception of the field operating environment (Yin, et al., 2018; Du, et al., 2021) [
21,
22].
In terms of optimal scheduling of airport surface resources, the research focuses on parking stand allocation, taxiing planning, and runway scheduling, etc. In Yin and Simaiakis’s studies, the arrival aircraft parking stand usage optimization and the departing aircraft push-back control optimization methods were respectively studied for the parking stand resource usage problem [
23,
24]. Taxiway resource usage problems were investigated by Xu and Tang for taxiway schedules planning and taxiway path planning to ensure the safety and efficiency of aircraft operations [
25,
26]. In Yin and Balakrishan’s studies, a runway resource scheduling model was developed for multi-runway airports to optimize the scheduling of runway resources in terms of runway sequencing and takeoff and landing times to improve runway operational safety and efficiency [
27,
28]. According to Bertsimas, a two-stage multi-objective optimization model was constructed to integrate the joint scheduling of airfield area resources by considering the scheduling requirements of airfield area resources, and a comprehensive allocation of spatial and temporal resources of the whole airfield area was carried out [
29].
The above-mentioned papers have carried out some preliminary studies in the field of airport surface operation optimization and model construction. As can be seen from the above, most current research works establish the model of airport surface operation based on specific operation procedures or rules, adopt scientific assessment of the surface operation capability, and optimize the scheduling of the surface spatial–temporal resources to improve the safety and efficiency of the arrival and departure aircraft, but they neglect to optimize the design of the “airport surface operation procedures” from the root level. From the perspective of key resources, the surface operation procedure involves three subsystems: runway, taxiway, and apron. As the runway operation mode and taxiway operation rules have been gradually researched on a large scale and widely applied, the apron operation procedures have not been studied systematically and thoroughly. Especially in the context of civil aviation industry-wide transfer of apron control, the problem of apron operation procedure optimization becomes more urgent. In the apron area of complex airports, the dense geographical distribution of parking stands, the limited space for aircraft operation, the frequent interaction of arrival and departure activities, as well as the existence of certain blind areas for control operation often lead to frequent problems in the apron such as aircraft cut-off, vehicle–aircraft cut-off, arrival and departure conflicts, taxiing avoidance, etc. Therefore, it is particularly important and urgent to use scientific methods to optimize the design of apron operation procedures and to scientifically evaluate the implementation performance of the designed operation procedures. In fact, scientific and reasonable apron operation procedures can essentially improve the safe, efficient, and smooth operation of arrival and departure aircraft in the apron area, while unreasonable apron operation procedures largely restrict the operational efficiency, fuel saving, and emission reduction level of the apron area and even the whole airport surface system.
Given this, this paper puts forward the optimization design and performance evaluation method of a U-shaped area operation procedure for arrival and departure aircraft operation activities in the complex aprons. First, based on the actual operation data of the airport and the configuration of the apron, we innovatively designed a diversified operation procedure for the apron U-shaped area and propose differentiated operation rules and traffic models under different operation procedures. Then, from the perspectives of safety, capacity, efficiency, and environmental protection, we construct a multi-dimensional performance evaluation index system of the apron U-shaped area and propose the specific measurement methods and comprehensive evaluation methods of various indices. Finally, to comprehensively verify the optimization of U-shaped area operation procedures, a simulation model of U-shaped area operation is integrated and developed. In addition, the advantages and shortcomings of various performance indices under different types of U-shaped area operation procedures are compared and analyzed in the final part.
4. Apron U-Shaped Area Traffic Operation Model
4.1. Notation
For different apron U-shaped area operation procedures, this section establishes a U-shaped area traffic operation model to enable the simulation of the apron U-shaped area operation process under different operation rules. To facilitate the description, the parameters and variables shown in
Table 1 are defined.
Network topology is a widely used method for airport surface operation modeling (Wang, et al., 2020; Ma, et al., 2019) [
34,
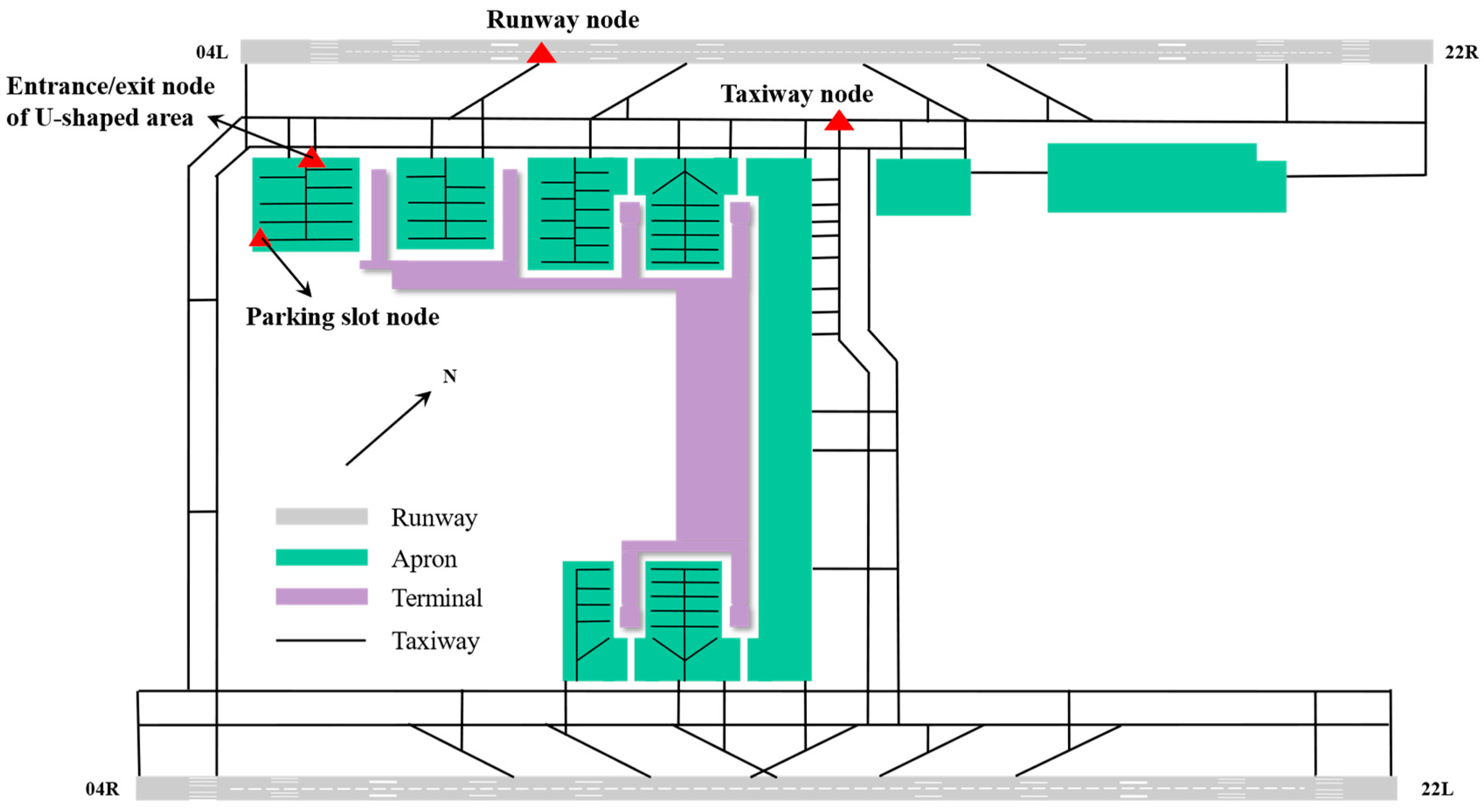
35]. As shown in
Figure 7, the airport’s runway–taxiway–apron system is abstracted as a set of directed graphs G = (V, E), where V is the set of points and E is the set of directed edges. The nodes in the surface network graph are divided into four parts: runway nodes, taxiway nodes, U-shaped area entrance/exit nodes, and parking stand nodes. The nodes are connected to each other by straight or curved segments.
It is worth noting that the model can be simplified by dividing the aircraft operation in the U-shaped area into two phases. For
(
), the aircraft operation can be divided into two phases: taxiing and stopping into the parking stand (pushing out of the parking stand).
is defined as the speed of the taxiing phase, which can be considered to be related to the aircraft type.
(
) is the time required to park into a parking stand (push out of a parking stand), which can be considered to be related to the type of aircraft. Based on the operational characteristics of arrival and departure aircraft in the U-shaped area, the operational time of an aircraft in the U-shaped area consists of two parts: taxiing time and waiting time. The time of the two phases of the operation of aircraft
in the U-shaped area can be expressed as the difference between the nodal times, as shown below:
where Equation (1) represents the time for an arrival aircraft to travel from the U-shaped area entrance to the parking stand, and Equation (2) represents the time for a departure aircraft to travel from the parking stand to the U-shaped area exit. Considering that aircraft operate on the same route and at the same speed in the U-shaped area, the aircraft through taxi time is the same for different U-shaped area operating procedures, but the difference in operating rules makes a difference in the additional taxi time of aircraft due to waiting under different procedures. Therefore, the following traffic model is carried out for each of the three types of operation procedures.
4.2. Traffic Modeling under Exclusive Operation Procedure
In the following part, we introduce the U-shaped area arrival aircraft queueing set and the departure aircraft queueing set , respectively, because we need a quantitative representation of the aircraft waiting time. is the set of arrival aircraft that are lined up at the entrance to the U-shaped area when the aircraft arrives in the U-shaped area (when ready to push back out of the block, ). is the set of departure aircraft in the U-shaped area that are preparing to push back out of block when the aircraft reaches the U-shaped area (when preparing to pull out of block, ). , , and the aircraft in operation in the U-shaped area are of great interest because we can use them to classify the aircraft waiting time into three categories. The details are as follows.
Case 1: The arrival aircraft can directly enter the U-shaped area (the departure aircraft can directly push out), i.e., .
Based on the description in
Section 3.2, when an arrival aircraft
reaches the U-shaped area entrance (when the departure aircraft
is ready to push back), there is no need to wait if there is no aircraft in operation in the U-shaped area. It is worth noting that there cannot be a queued aircraft before that aircraft, so
also needs to be satisfied in Case 1.
Case 2: The arrival aircraft
(departure aircraft
) can enter the U-shaped area directly (can be pushed out directly), but needs to wait for the aircraft
operating in the U-shaped area to leave the U-shaped area (or park on arrival). We obtain
where
is the aircraft in the U-shaped area that is operating, and the corresponding parking stand of
is
. The following explanations of
and
are the same.
Based on the description in
Section 3.2, when the arrival aircraft
reaches the U-shaped area entrance (when the departure aircraft
is ready to push out), it needs to wait for the U-shaped area to be cleared before it can operate in the U-shaped area. It is worth noting that there cannot be a queued aircraft before that aircraft, so
also needs to be satisfied in Case 2.
Case 3: The arrival aircraft
(departure aircraft
) can enter the U-shaped area directly (can be pushed out directly), but needs to wait for the aircraft
operating in the U-shaped area,
and
to leave the U-shaped area (or park on arrival). We obtain
where
is the aircraft in the U-shaped area that is operating, and the corresponding parking stand of
is
.
Based on the description in
Section 3.2, when the arrival aircraft
reaches the U-shaped area entrance (when the departure aircraft
is ready to push out), it needs to wait for the U-shaped area to be cleared before it can operate in the U-shaped area. Also, we note that based on the first-come first-served (FCFS) principle (Ma J, et al., 2019) [
35], the demand of the aircraft queued before that aircraft should be satisfied first. So, the condition used in Case 3 is
.
4.3. Traffic Modeling under Partition-Shared Operation Procedure
We can also divide the aircraft waiting time into three categories by
,
, and the aircraft operating in the U-shaped area based on the description in
Section 3.3 and
Section 4.2. The details are as follows.
Case 1: Same as case 1 in the Exclusive Operation Procedure, the arrival or departure aircraft can directly enter the U-shaped area or push out, i.e., .
Based on the description in
Section 3.3, in this scenario, there is no need to wait if there is no aircraft in operation in the U-shaped area. We also note that the partition-shared operation procedure is different from the exclusive operation procedure. There is no need to wait for aircraft
when the partitional area of the parking stand of
is different from that of the aircraft
in operation, as shown in Equation (6).
where
is the distance from the middle area boundary to the U-shaped area entrance/exit,
is the distance from the inner area boundary to the U-shaped area entrance/exit.
It is worth noting that there cannot be a queued aircraft before that aircraft, so also needs to be satisfied in Case 1.
Case 2: Except for Case 1, the arrival aircraft
(departure aircraft
) can enter the U-shaped area directly (can be pushed out directly), but needs to wait for the aircraft
operating in the U-shaped area to leave the U-shaped area (or park on arrival). We obtain
We can conclude that departure aircraft located in the middle area can use long push as well as push-and-pull strategies to reduce the delay time based on the description in
Section 3.3. From this, we define the time of the long push of the departure aircraft in the middle area as
; when
, the delay time
in the long push case is shown in the following equation.
where
is the aircraft queued next to and after
on FCFS principle.
It is worth noting that there cannot be a queued aircraft before that aircraft, so also needs to be satisfied in Case 2.
Case 3: The arrival aircraft
(departure aircraft
) can enter the U-shaped area directly (can be pushed out directly), but needs to wait for the aircraft
operating in the U-shaped area,
and
to leave the U-shaped area (or park on arrival), and the operation separations for
and
are considered. We obtain
where
consists of two components.
is the waiting time for an aircraft in operation and is calculated by Equations as shown in Case 2.
is the waiting time between aircraft operations in
and
, which is the additional delay time due to FCFS strategy. The following explanations of
,
and
are the same.
Based on the description in
Section 3.3, when the arrival aircraft
reaches the U-shaped area entrance (when the departure aircraft
is ready to push out), it needs to wait for a safety separation to exist with all aircraft in the U-shaped area before it can operate. Also, we note that based on the FCFS principle, the demand of the aircraft in line before that aircraft should be satisfied first. So, the condition used in Case 3 is
. Therefore, in Case 3,
is added to the waiting time of aircraft
on basis of Equation (10). The value of
is related to the aircraft
that immediately precedes aircraft
in queue
as well as
on FCFS basis.
can be calculated by Equation (11):
4.4. Traffic Modeling under Global-Shared Operation Procedure
We can divide the aircraft waiting time into three categories by
,
, and the aircraft operating in the U-shaped area based on the description in
Section 3.4 and
Section 4.2. The details are as follows:
Case 1: Same as case 1 in the Exclusive Operation Procedure and Partition-Shared Operation Procedure, the arrival or departure aircraft can enter or push out from the U-shaped area directly, i.e., .
Based on the description in
Section 3.4, in this scenario, there is no need to wait if there is no aircraft in operation in the U-shaped area. We also note that the global-shared operation procedure is different from the exclusive operation procedure. There is no need to wait for aircraft
as long as the lowest separation of the aircraft is satisfied, the detail is shown in Equation (12).
where
is the minimum safe separation between aircraft in a U-shaped zone and
is the aircraft in the U-shaped area that is operating whose corresponding parking stand is
.
Case 2: the arrival aircraft
(departure aircraft
) can enter the U-shaped area directly (can be pushed out directly), but it needs to wait until there is a safe separation between
and the aircraft
in operation in the U-shaped area. When the arrival aircraft reaches the entrance of the U-shaped area (when the departure aircraft is ready to be pushed out), there may be more than one aircraft in operation in the U-shaped area. The waiting time of the arrival aircraft at the entrance (the waiting time of the departure aircraft at the parking stand) shall be determined according to the number of aircraft in operation and their status (arrival or departure). We obtain
where
is the earliest time to enter the U-shaped area (the earliest off-block time) for
(
). It is worth noting that there cannot be a queued aircraft before that aircraft, so
also needs to be satisfied in Case 2.
Case 3: The arrival aircraft (departure aircraft ) can enter the U-shaped area directly (can be pushed out directly), but the it need to wait for safety separations between and the aircraft operating in the U-shaped area () as well as the aircraft in queueing list ( and ) are satisfied, as shown in Equation (10).
Based on the description in
Section 3.4, when the arrival aircraft
reaches the U-shaped area entrance (when the departure aircraft
is ready to push out), it needs to wait for a safety separation to exist with all aircraft in the U-shaped area before it can operate. Also, we note that based on the FCFS principle, the demand of the aircraft in line before that aircraft should be satisfied first. So, the condition used in Case 3 is
. Therefore, in Case 3,
is added to the waiting time of aircraft
on basis of Equation (13). The value of
is related to the aircraft
that immediately precedes aircraft
in queue
as well as
on FCFS basis.
can also be calculated by Equation (11):
7. Conclusions
For this study, we designed three types of U-shaped area operation procedures for complex airport apron systems and constructed arrival and departure traffic operation rules and mathematical models for each operation procedure. To evaluate the performance of the operation on the apron, we proposed a U-shaped area operation performance evaluation index system and evaluation methods from three dimensions: safety, efficiency, and environmental protection, which should be taken into account in airport surface operation. A case study of the Wuhan Tianhe Airport was carried out to quantitatively assess the operation procedures proposed, including simulation evaluation and comprehensive verification analysis of apron U-shaped area operation under different operation procedures and flight flows.
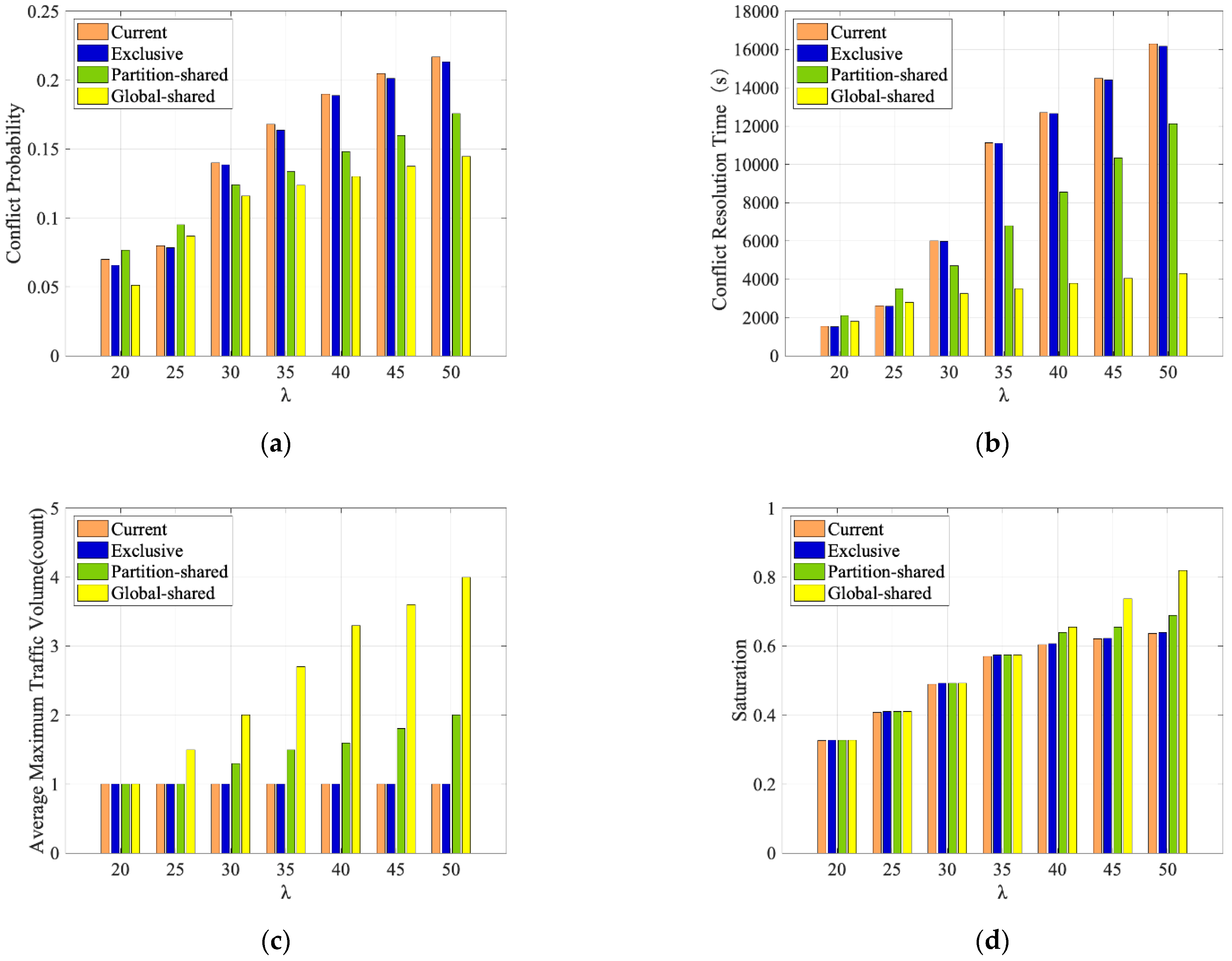
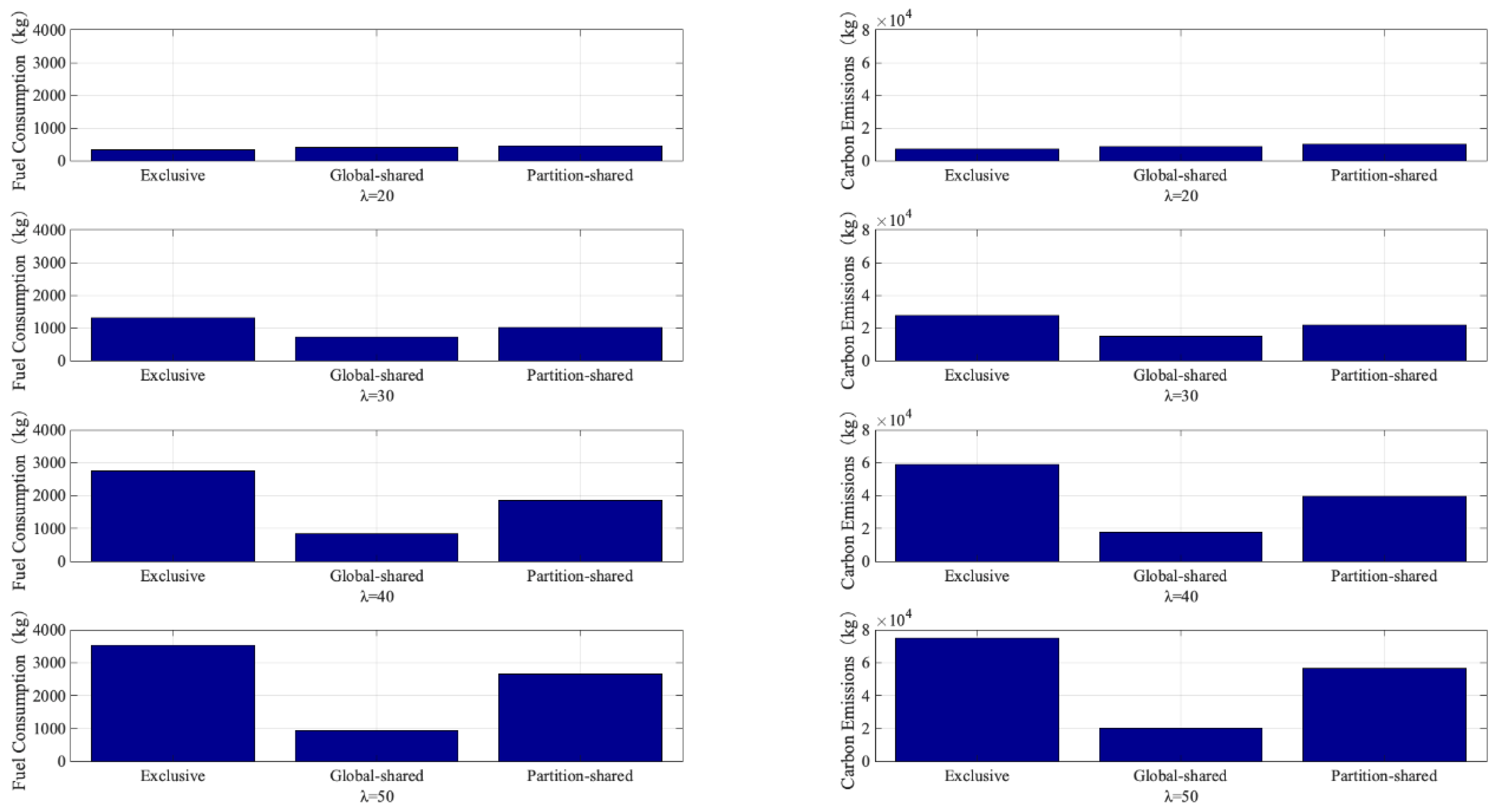
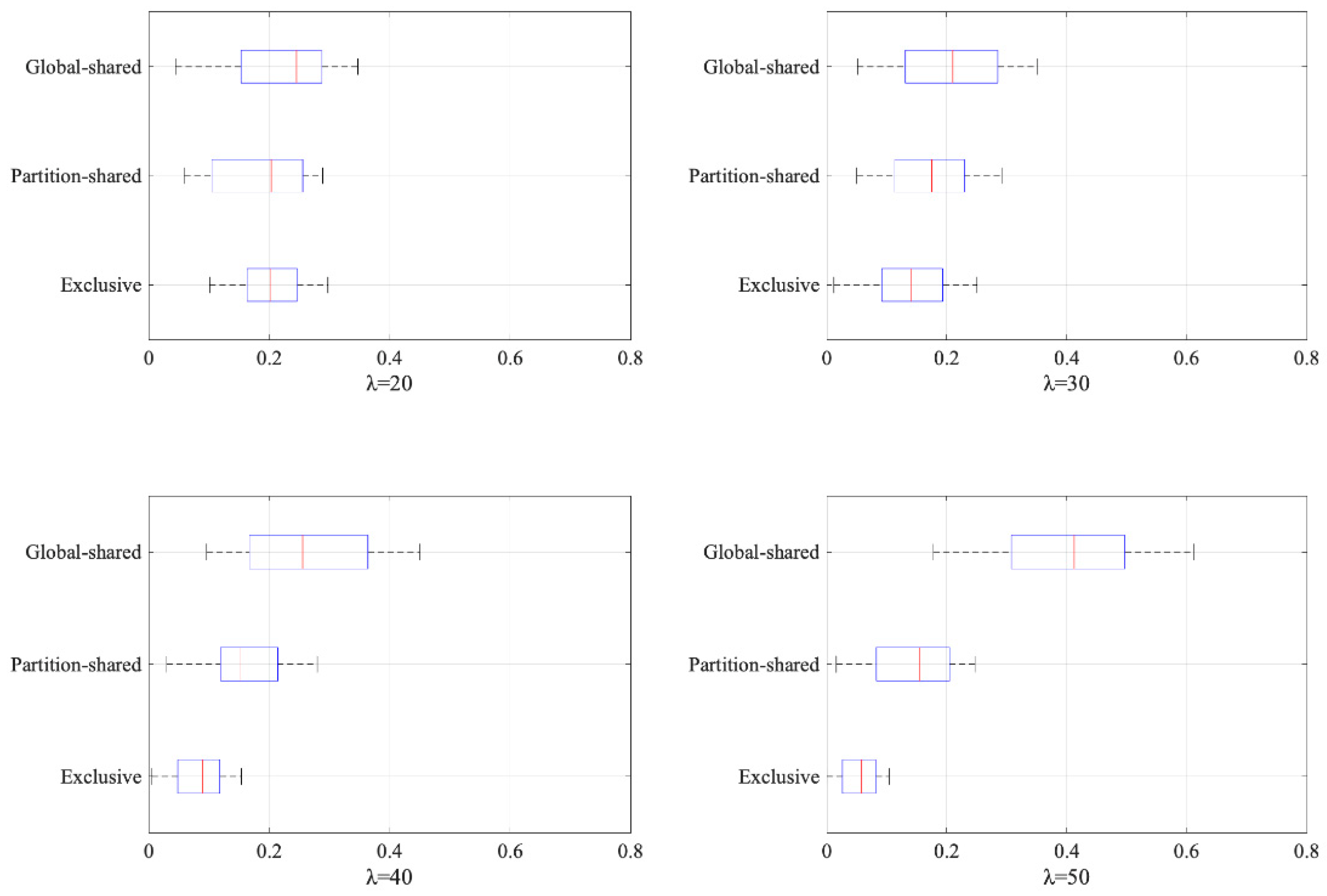
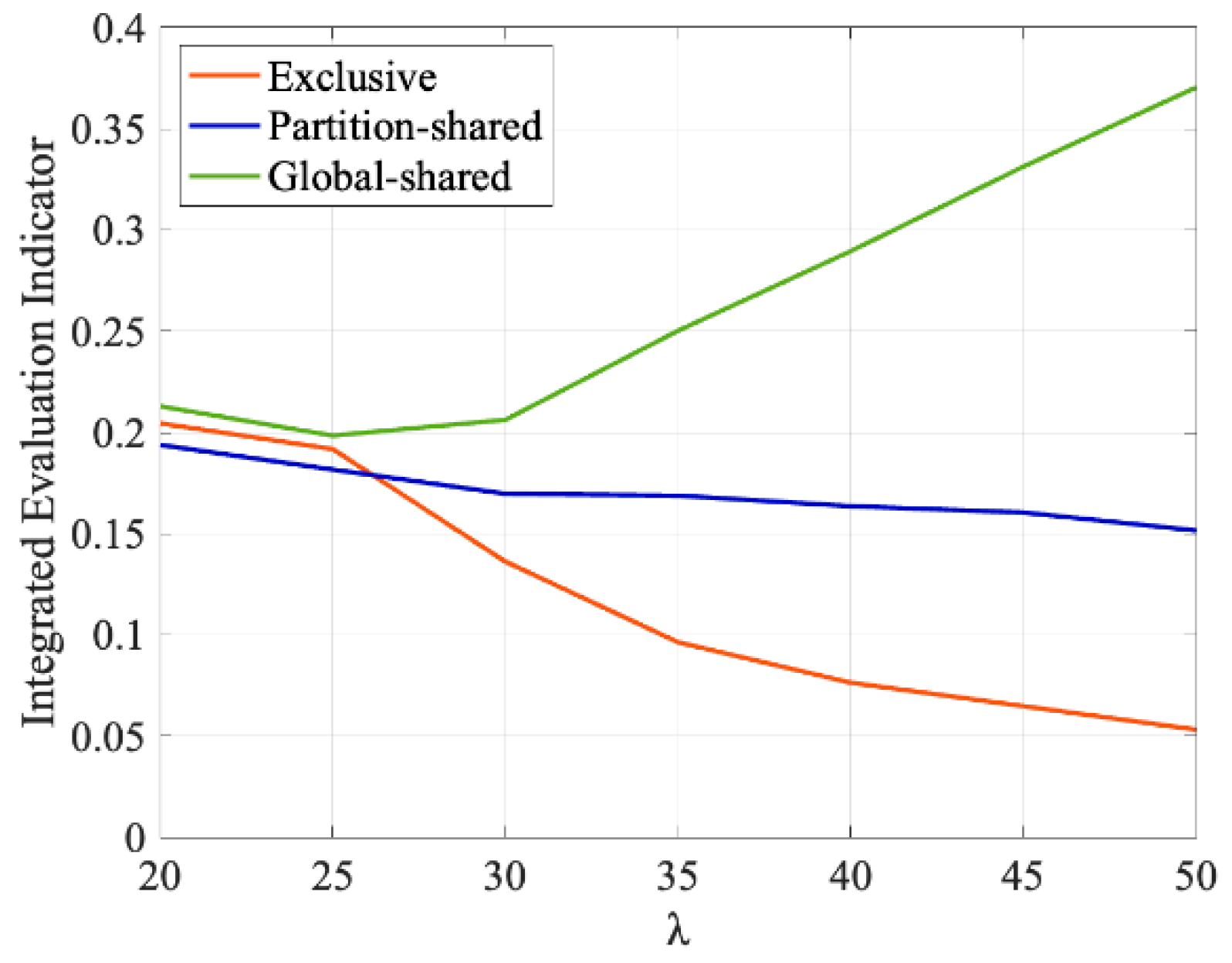
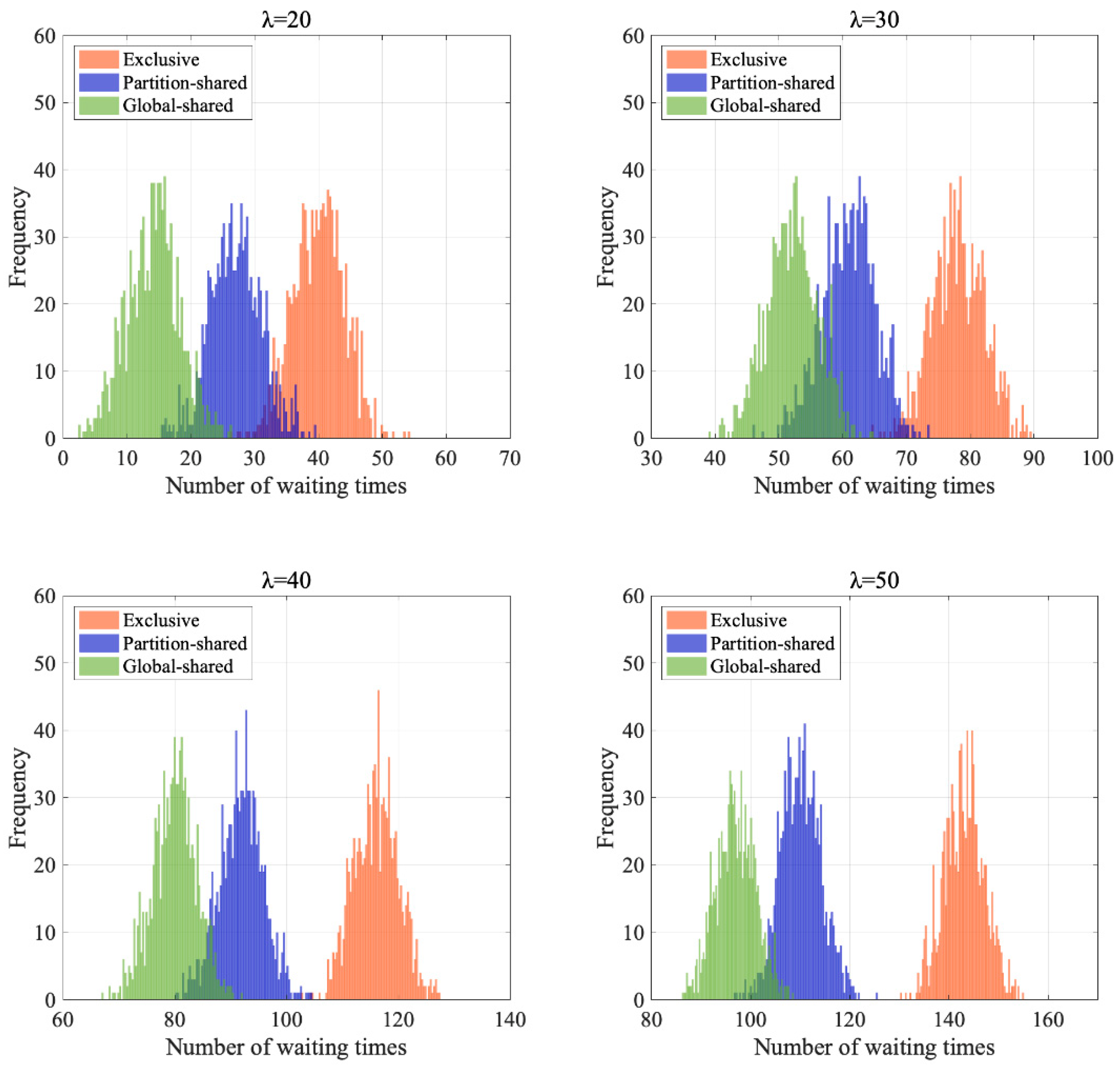
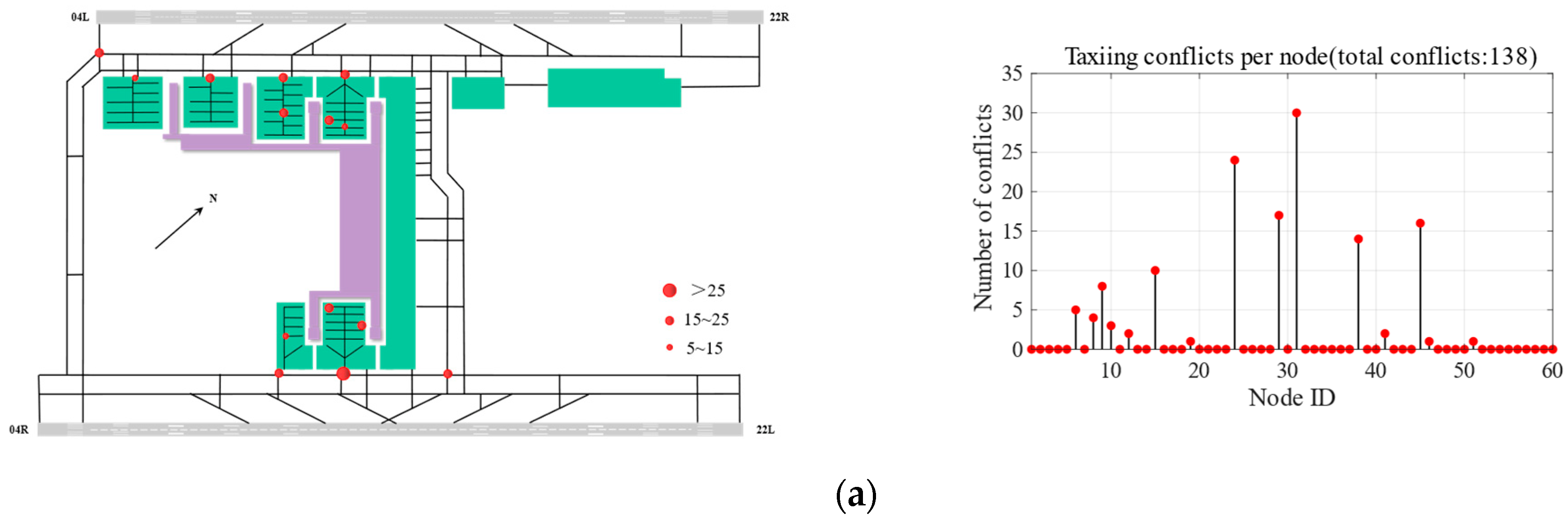
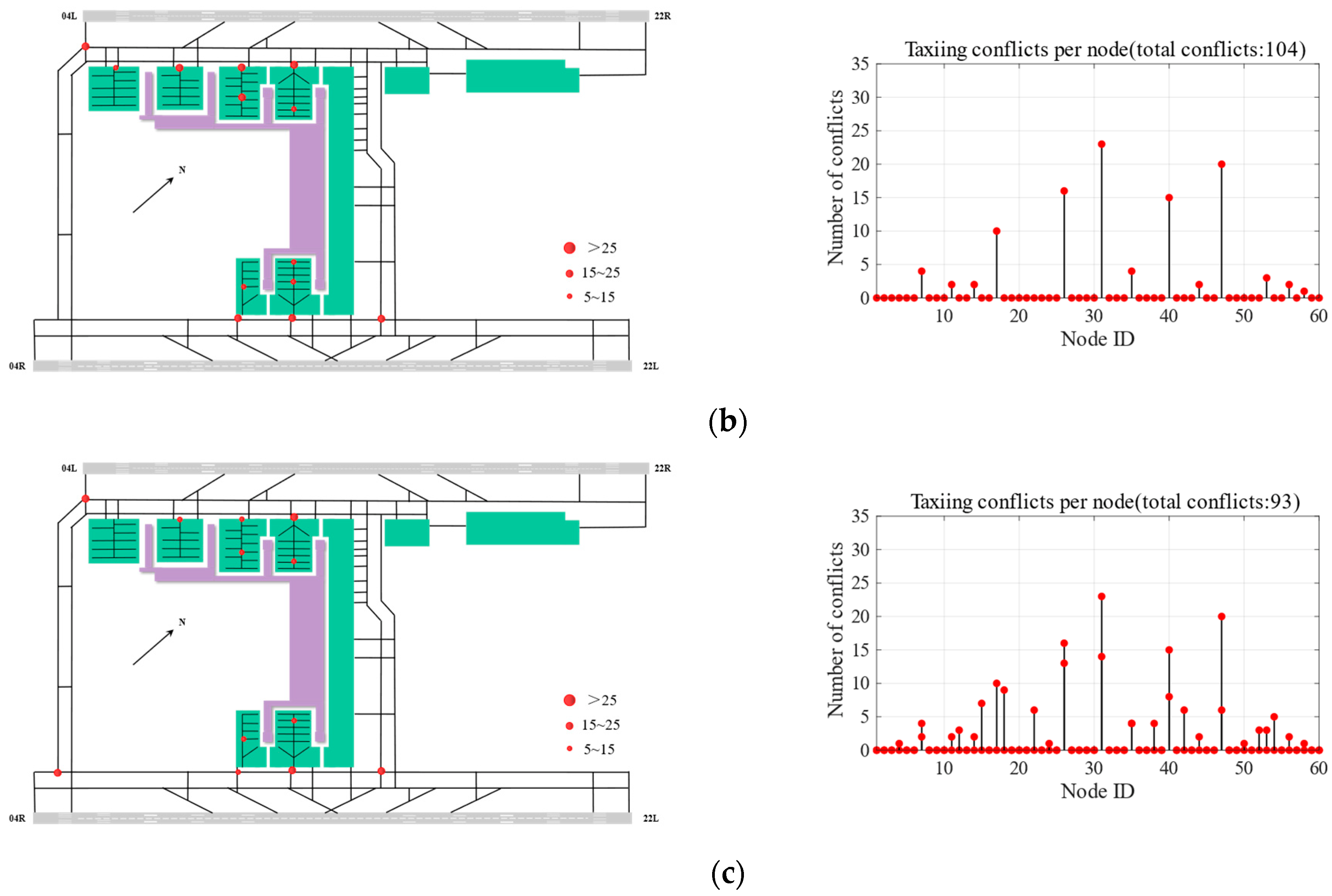
The main conclusions of this paper are as follows. First, the designed global-shared operation procedure can fully release the operation potential of the complex airport U-shaped area and increase the apron operation capacity by 14.8% and 5.0% compared to the exclusive and partition-shared operation procedures, respectively. When the hourly flight volume is lower than 30 aircraft/h, i.e., the capacity and traffic flow ratio corresponding to all three operation procedures is less than 60%, the difference in the operation effect of the three procedures is small; when the hourly flight volume increases from 30 to 50 aircraft/h, the advantages of the global-shared operation procedures are more prominent, which can effectively reduce the conflict probability, conflict resolution time, flight fuel consumption, and emission and improve the efficiency of apron resource utilization. Compared with the exclusive and partition-shared operation procedures, the global-shared operation procedure could reduce the probability of aircraft conflict by 32.2% and 11.8%, respectively and the average conflict resolution time per flight by 16.1 s and 10.6 s, respectively and could increase the resource utilization rate of each U-zone by 66% and 25%, respectively. The average daily fuel consumption of a single aircraft could be reduced by 3.6 kg and 2.4 kg, respectively, and the average daily carbon emission of a single aircraft could be reduced by 16.7 kg and 11.0 kg, respectively, translating into respective reductions of 1.2 tons and 0.8 tons of carbon emission in a whole year, which has a significant effect on effectively promoting fuel saving and emission reduction of the airport.
In the process of apron control, airports and ATC departments should not overly pursue restrictive and strict operational rules in the design of U-shaped area operation procedures and ignore the efficiency of apron resource utilization and aircraft operation, but should achieve a comprehensive trade-off between capacity, efficiency, and environmental protection and other performance indices as far as possible under the premise of ensuring operational safety.
Future studies should research the optimized design of apron operation procedures combined with apron control handover procedures for the three subsystems of runways, taxiways, and aprons on the surface and draw on the results of other fields to further improve the refinement of the operational assessment of the aprons and the surface as a whole and optimize the surface operation efficiency. In our future work, the proposed procedures will be further validated from the point of view of airport controllers’ workloads as well as flexibly adapted to the traffic flow by analyzing the traffic flow characteristics of different airports at different times of the day.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}