
An Analysis of the Vibration Characteristics of an Aviation Hydraulic Pipeline with a Clamp


Abstract
:1. Introduction
2. Fluid–Solid Coupling Model
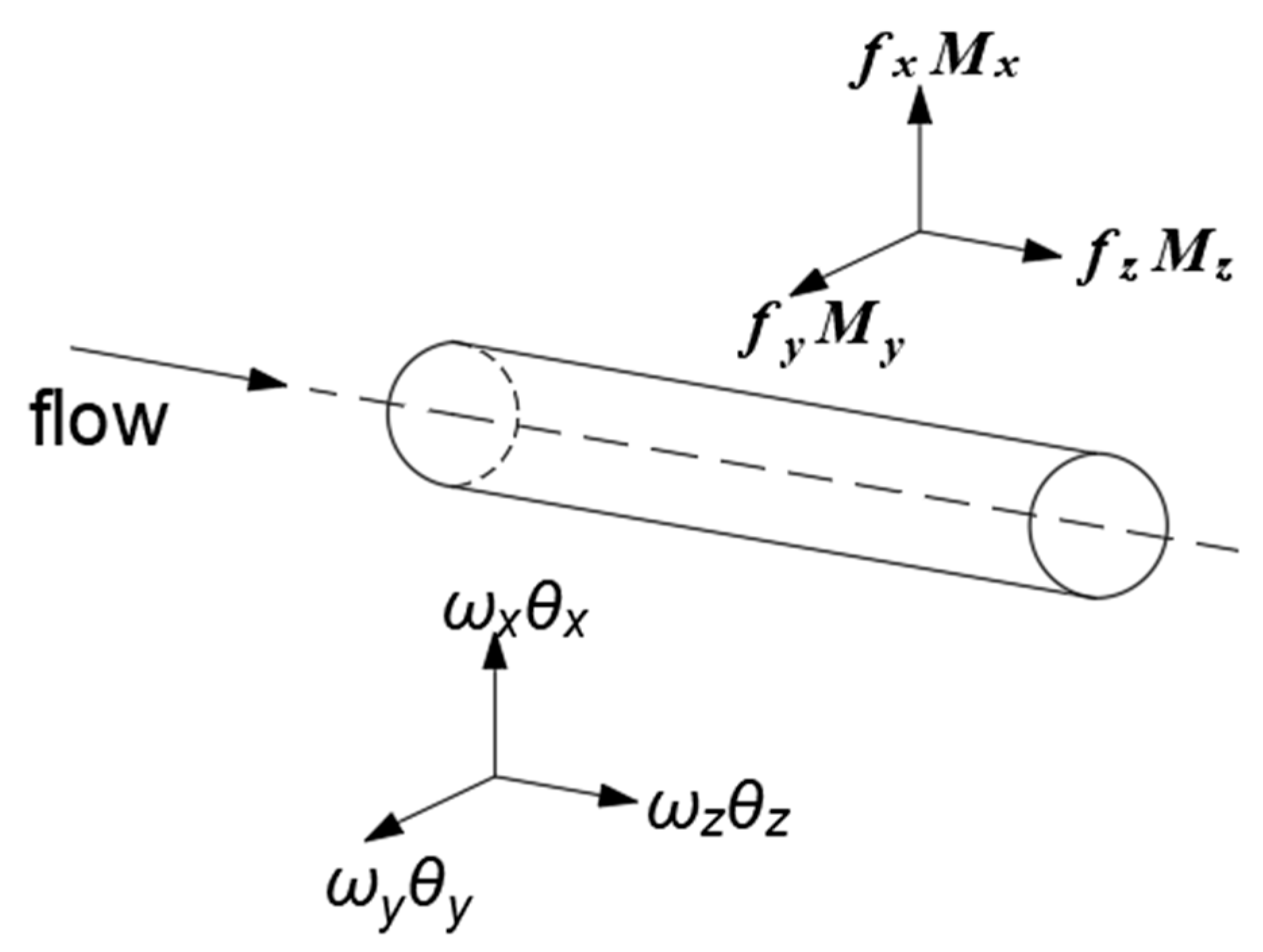
2.1. Fluid–Solid Coupling Fourteen-Equation Model
- (1)
- Axial vibration equation:
- (2)
- Radial vibration equation:
- (3)
- Torsional vibration equation:
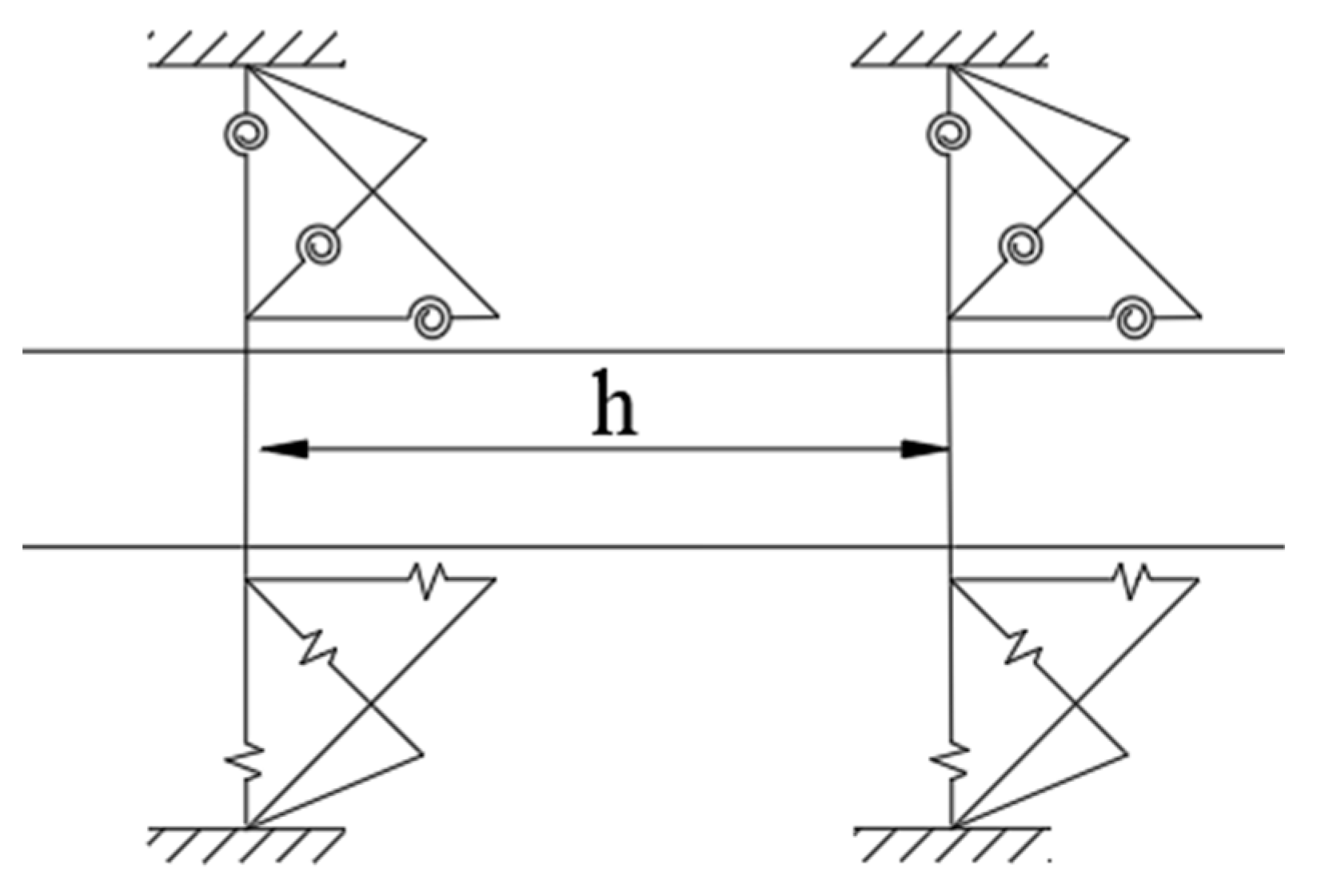
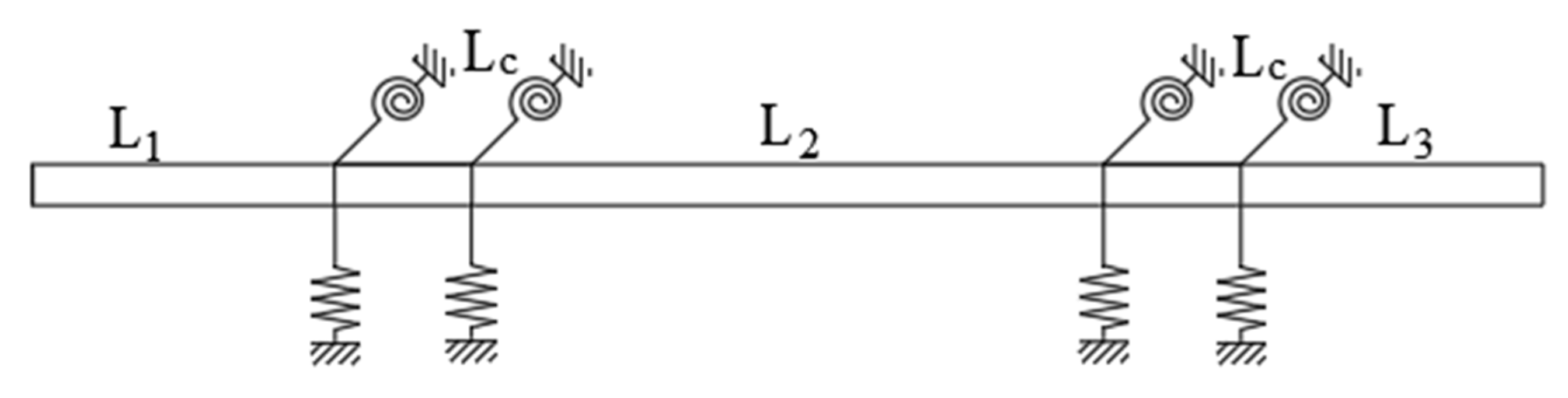
2.2. Establishment of the Intermediate Constraint Matrix of the Clamp
2.2.1. The Discrete Stiffness Model of Clamps
2.2.2. Measurement of Clamp Stiffness
2.3. Excitation Matrix and Boundary Conditions
3. Numerical Model Calculation
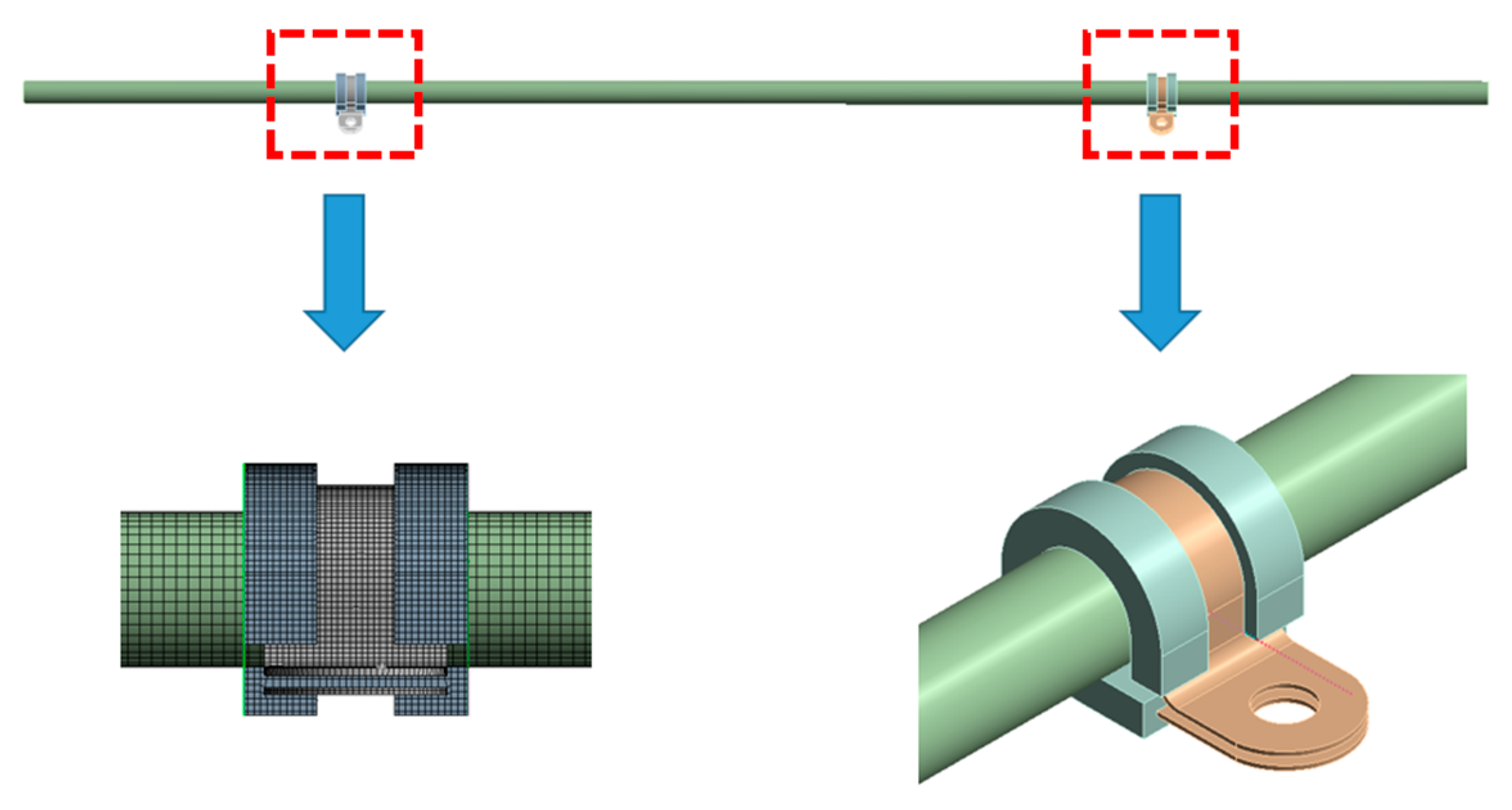
3.1. Establishment of a Model for a Hydraulic Pipeline for Aviation
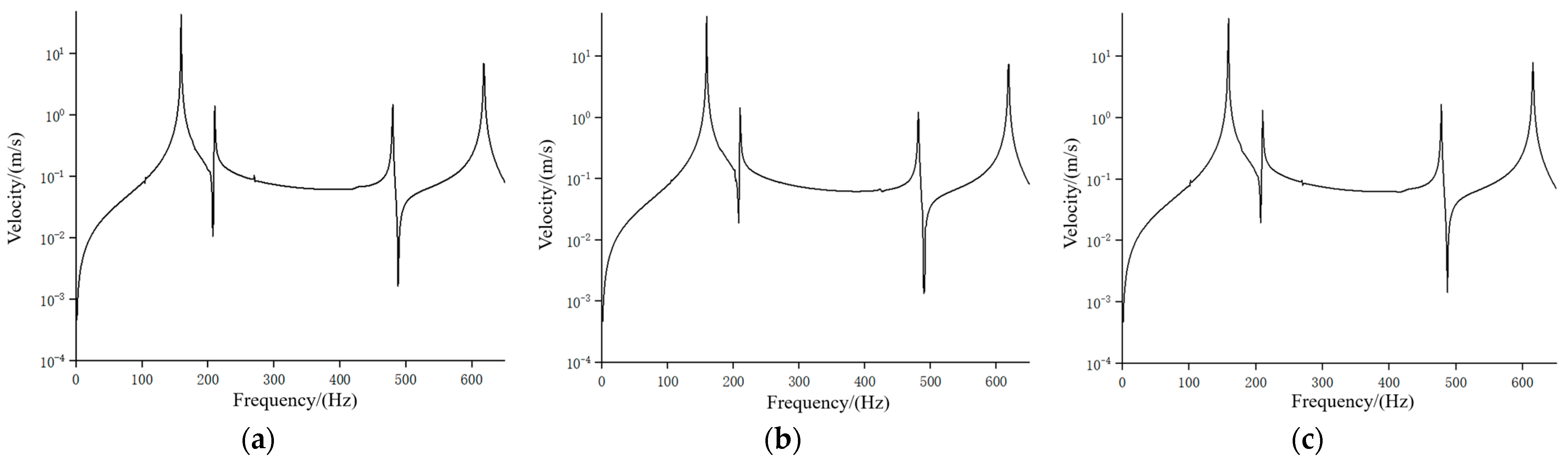
3.2. Vibration Characteristics Analysis of a Hydraulic Pipeline for Aviation
4. Model Verification and Analysis
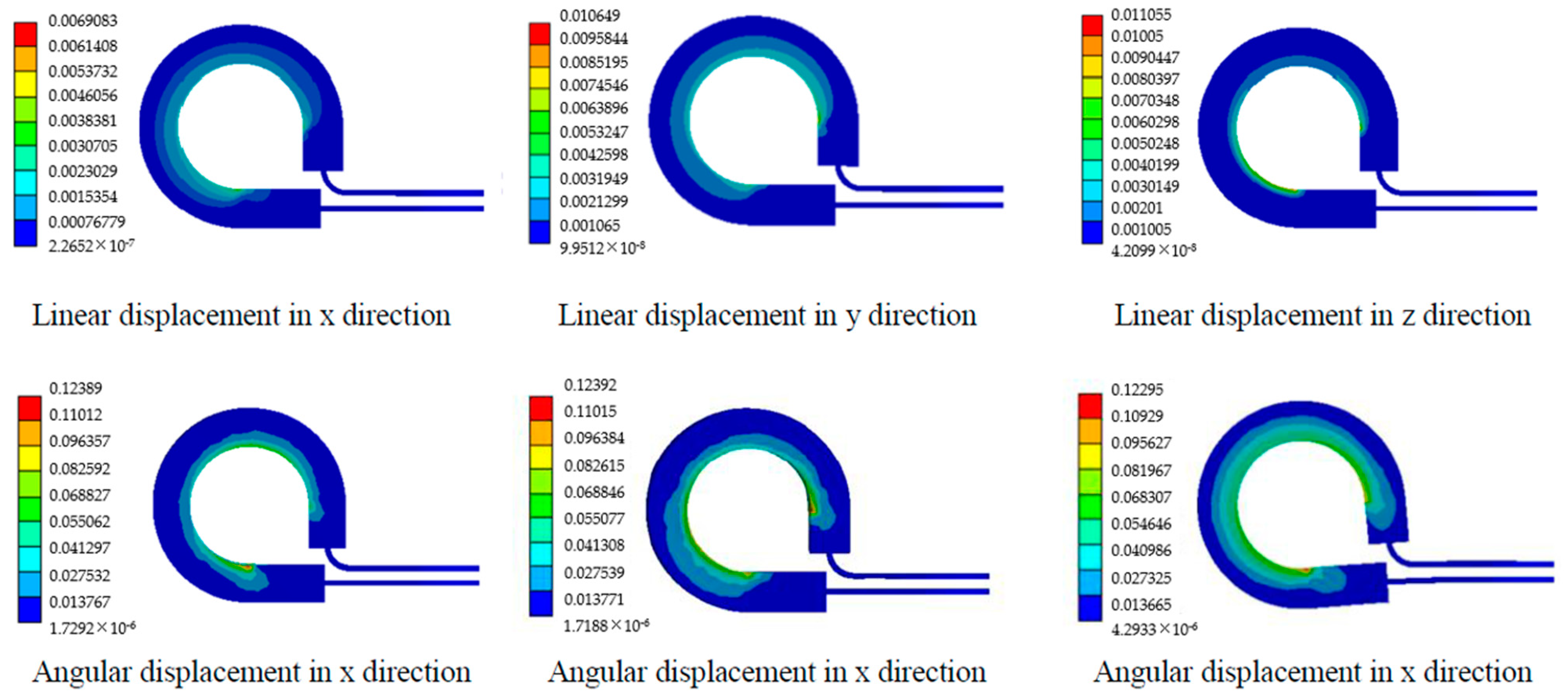
4.1. Finite Element Verification of the Model
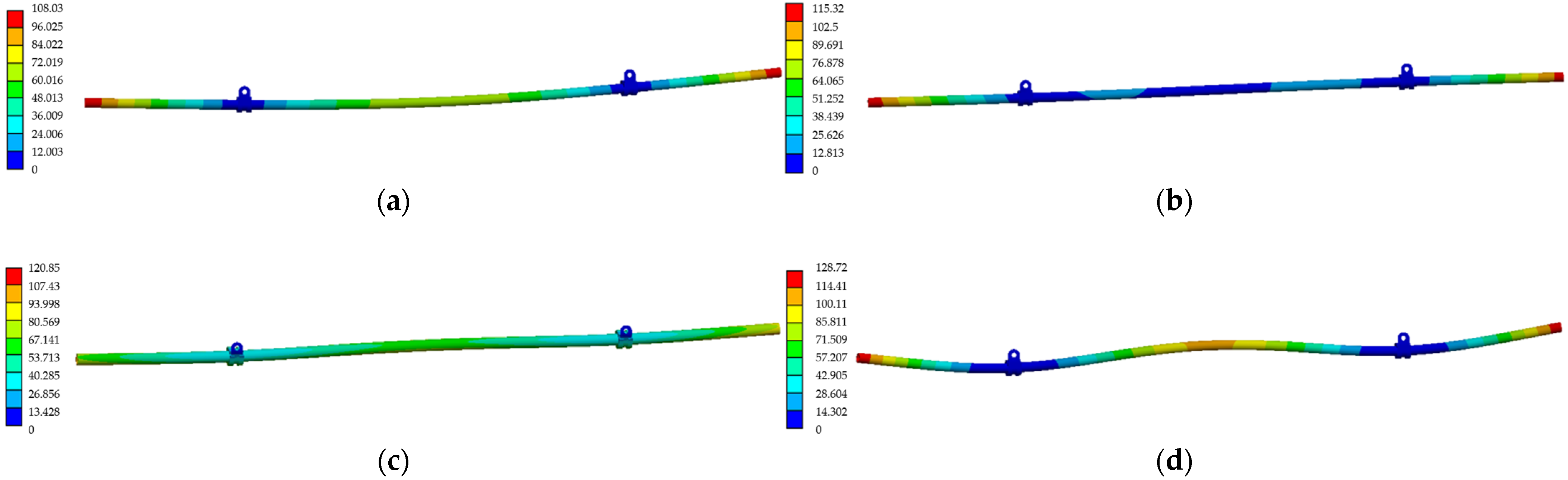
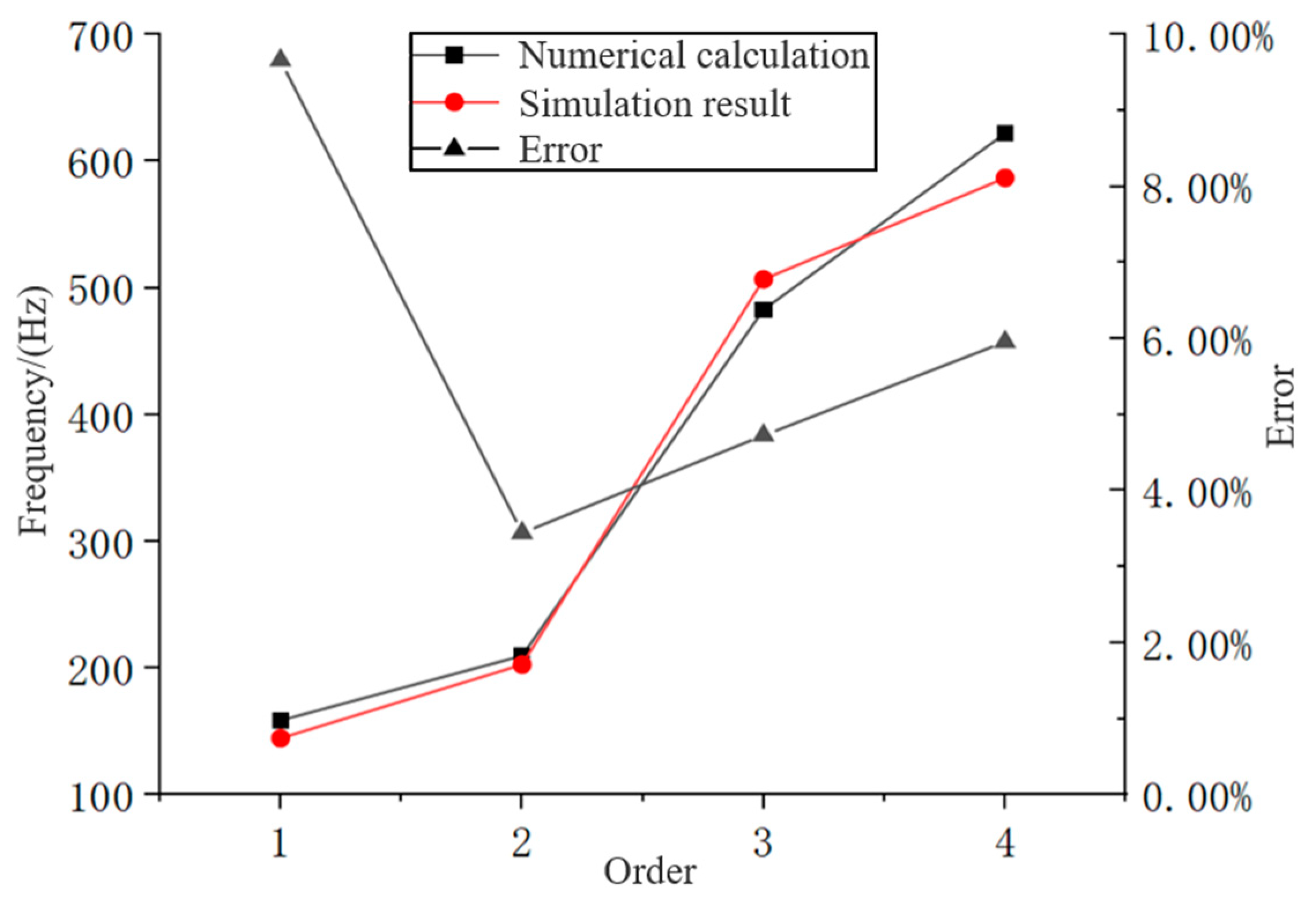
4.2. Simulation Results and Comparative Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Liu, Y.; Xia, T.; Chen, Z.; Yan, G. The development of statistical contact model for rough surface. Tribology 2020, 40, 395–406. [Google Scholar] [CrossRef]
- Chen, Z.; Liu, Y.; Zhou, P. A comparative study of fractal dimension calculation methods for rough surface profiles. Chaos Solitons Fractals 2018, 112, 24–30. [Google Scholar] [CrossRef]
- Stosiak, M.; Karpenko, M.; Prentkovskis, O.; Deptuła, A.; Skačkauskas, P. Research of vibrations effect on hydraulic valves in military vehicles. Def. Technol. 2023; in press. [Google Scholar] [CrossRef]
- Chen, Z.; Zhang, X.; Zhou, P. Vibration fatigue life analysis of engine piping system based on multi-point random excitation. J. Propuls. Technol. 2019, 40, 1620–1627. [Google Scholar]
- Wu, J.; Zheng, S.; Wang, C.; Yu, Z. Study on pipeline self-excited vibration using transient fluid-structure coupling method. Int. J. Adv. Manuf. Technol. 2020, 107, 4055–4068. [Google Scholar] [CrossRef]
- Duan, J.; Li, C.; Jin, J. Modal analysis of tubing considering the effect of fluid-structure interaction. Energies 2022, 15, 670. [Google Scholar] [CrossRef]
- Gao, P.; Zhai, J.; Yan, Y.; Han, Q.; Qu, F.; Chen, X. A model reduction approach for the vibration analysis of hydraulic pipeline system in aircraft. Aerosp. Sci. Technol. 2016, 49, 144–153. [Google Scholar] [CrossRef]
- Xu, Y.Z.; Johnston, D.N.; Jiao, Z.X.; Plummer, A.R. Frequency modelling and solution of fluid–structure interaction in complex pipelines. J. Sound Vib. 2014, 333, 2800–2822. [Google Scholar] [CrossRef]
- Sadeghi, M.H.; Karimi-Dona, M.H. Dynamic behavior of a fluid conveying pipe subjected to a moving sprung mass—An fem-state space approach. Int. J. Press. Vessel. Pip. 2011, 88, 123–131. [Google Scholar] [CrossRef]
- Quan, L.; Che, S.; Guo, C.; Gao, H.; Guo, M. Axial vibration characteristics of fluid-structure interaction of an aircraft hydraulic pipe based on modified friction coupling model. Appl. Sci. 2020, 10, 3548. [Google Scholar] [CrossRef]
- Li, J.; Zhang, D.; Wang, L.; Lin, D.; Hong, J. Modal characteristics analysis for pipelines considering influence of fluid medium. J. Aerosp. Eng. 2019, 34, 671–677. [Google Scholar] [CrossRef]
- Quan, L.; Sun, B.; Zhao, J.; Li, D. Frequency response analysis of fluid-structure interaction vibration in aircraft bending hydraulic pipe. J. Northwestern Polytech. Univ 2018, 36, 487–495. [Google Scholar] [CrossRef]
- Ma, T.; Du, J.; Xu, D.; Dai, L.; Zhang, Y. Vibration characteristics analysis of fluid-conbeying pipe system with general elastic boundary supports. J. Vib. Eng. Technol. 2018, 31, 441–449. [Google Scholar] [CrossRef]
- Karpenko, M.; Prentkovskis, O.; Šukevičius, Š. Research on high-pressure hose with repairing fitting and influence on energy parameter of the hydraulic drive. Eksploat. Niezawodn. Maint. Reliab. 2022, 24, 25–32. [Google Scholar] [CrossRef]
- Liu, M.; Wang, Z.; Zhou, Z.; Qu, Y.; Yu, Z.; Wei, Q. Vibration response of multi-span fluid-conveying pipe with multiple accessories under complex boundary conditions. Eur. J. Mech. A-Solids 2018, 72, 41–56. [Google Scholar] [CrossRef]
- Lin, J.; Zhao, Y.; Zhu, Q.; Han, S.; Ma, H.; Ha, Q.K. Nonlinear characteristic of clamp loosing in aero-engine pipeline system. IEEE Access 2021, 9, 64076–64084. [Google Scholar] [CrossRef]
- Gao, Y.; Sun, W. Inverse identification of the mechanical parameters of a pipeline hoop and analysis of the effect of preload. Front. Mech. Eng. 2019, 14, 358–368. [Google Scholar] [CrossRef]
- Gao, Y.; Sun, W.; Piao, Y.; Ma, H. Inverse identification of support stiffness and damping of hoop based on measured FRF. J Aerosp. Eng. 2019, 34, 664–670. [Google Scholar] [CrossRef]
- Li, F.; Liu, W.; Wei, S.; Liu, Y. Research on equivalent stiffness and influence factors of aero-clamps for aircraft hydraulic pipeline. Mech. Sci. Technol. Aerosp. Eng. 2017, 36, 1472–1476. [Google Scholar] [CrossRef]
- Fei, C.; Han, Y.; Wen, J.; Li, C. Deep learning-based modeling method for probabilistic LCF life prediction of turbine blisk. Propul. Power Res. 2023; 13, online. [Google Scholar] [CrossRef]
- Gao, H. Modification of 14-Equation Model for Fluid-Structure Interaction and Vibration Characteristic Analysis of Hydraulic Pipeline. Master’s Thesis, Yanshan University, Qinhuangdao, China, 2021. [Google Scholar] [CrossRef]
- Li, S. Dynamic Analysis of Fluid-Structure Interaction of Pipe Systems Conveying Fluid. Ph.D. Dissertation, Harbin Engineering University, Harbin, China, 2015. [Google Scholar]
- Aero-Engine Design Manual Editorial Committee. Aero-Engine Design Manual, 19th ed.; Aviation Industry Press: Beijing, China, 2000; pp. 320–324. [Google Scholar]
- Editorial Committee of China Aviation Materials Handbook. China Aviation Materials Handbook, 3rd ed.; Standards Press of China: Beijing, China, 1988; pp. 117–190. [Google Scholar]
- Che, S. Frequency Domain Characteristic Analysis of Fluid-Structure Interaction Vibration of Civil Aircraft Fuel Pipeline. Master’s Thesis, Yanshan University, Qinhuangdao, China, 2021. [Google Scholar] [CrossRef]
- Qiu, M.; Chen, Z.; Wang, J.; Liu, Z.; Zhao, W. Experiment and numerical analysis of natural frequency for liquid-filled pipe. J. Propuls. Power 2013, 34, 1537–1542. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Clamping Strap Material Parameters | Density/kg·m−3 | Poisson Ratio | Elastic Modulus/MPa |
| 7930 | 0.33 | 1.86 × 105 | |
| Rubber material parameter | C10 | C0 | D0 |
| 0.774 | 0.193 | 0.025 |
| Linear Stiffness | kx/(N/m) | Ky/(N/m) | Ky/(N/m) |
| 4.97 × 105 | 2.64 × 105 | 4.21 × 105 | |
| Angular stiffness | Kyz/(N/m) | Kxz/(N/m) | Kxy/(N/m) |
| 0206.7 | 891.1 | 557.4 |
| Parameter Title 2 | Value |
|---|---|
| Tube length L1/(mm) | 200 |
| Tube length L2/(mm) | 500 |
| Tube length L3/(mm) | 200 |
| Clamp width Lc/(mm) | 200 |
| Thickness of pipe wall/(mm) | 1 |
| Inner radius/(mm) | 5.4 |
| Poisson ratio | 0.33 |
| Pipeline density/(kg/m3) | 7930 |
| Shear modulus/(Pa) | 6.99 × 1010 |
| Young’s modulus/(Pa) | 1.86 × 1011 |
| Fluid density/(kg/m3) | 1000 |
| Average Fluctuating Pressure/MPa | Peak Value/MPa | Frequency/Hz |
|---|---|---|
| 16 | 1.5 | 40 |
| Order | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
| Numerical calculation | 154.41 | 208.8 | 480.57 | 617.32 |
| Simulation result | 139.49 | 198.31 | 501.49 | 584 |
| Error | 9.66% | 5.02% | 4.35% | 5.4% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Wei, J.; Du, H.; He, Z.; Yan, F. An Analysis of the Vibration Characteristics of an Aviation Hydraulic Pipeline with a Clamp. Aerospace 2023, 10, 900. https://doi.org/10.3390/aerospace10100900
Liu Y, Wei J, Du H, He Z, Yan F. An Analysis of the Vibration Characteristics of an Aviation Hydraulic Pipeline with a Clamp. Aerospace. 2023; 10(10):900. https://doi.org/10.3390/aerospace10100900
Chicago/Turabian StyleLiu, Yong, Jinting Wei, Hao Du, Zhenpeng He, and Fangchao Yan. 2023. "An Analysis of the Vibration Characteristics of an Aviation Hydraulic Pipeline with a Clamp" Aerospace 10, no. 10: 900. https://doi.org/10.3390/aerospace10100900