
Aerocapture Optimization Method with Lift–Drag Joint Modulation Suitable for Variable Structure Spacecraft


Abstract
:1. Introduction
2. Preliminary Feasibility of Joint Modulation
2.1. Aerocapture Process
2.2. Equation of Motion and Vehicle Model
2.3. Corridor
2.4. Influence of Ballistic Coefficient
3. Optimal Aerocapture Problem Formulation
3.1. Initial and Terminal Constraints
3.2. Control Variables
3.3. Path Constraints
3.4. Performance Index
3.5. Optimal Control Problem
4. Results and Analysis
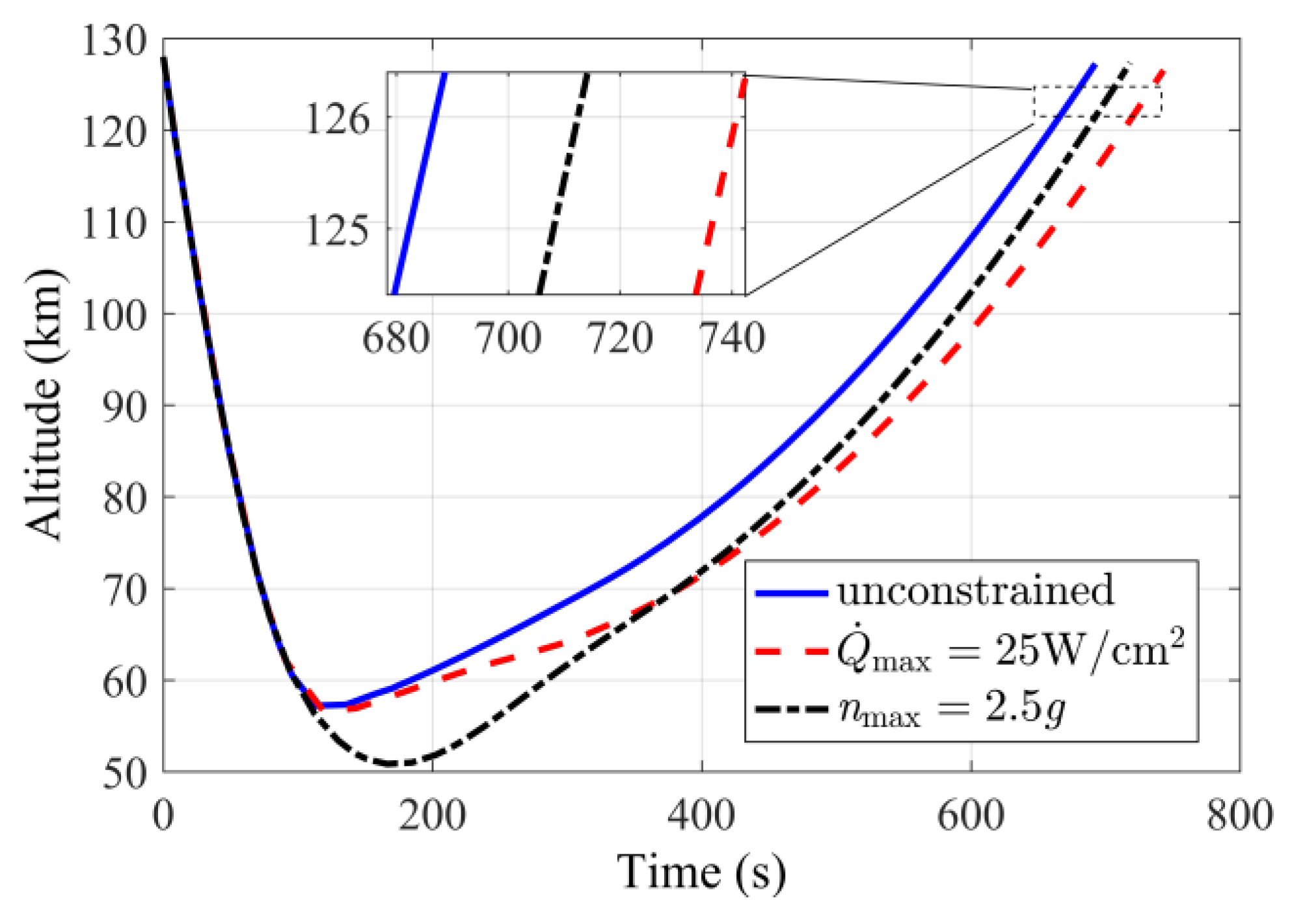
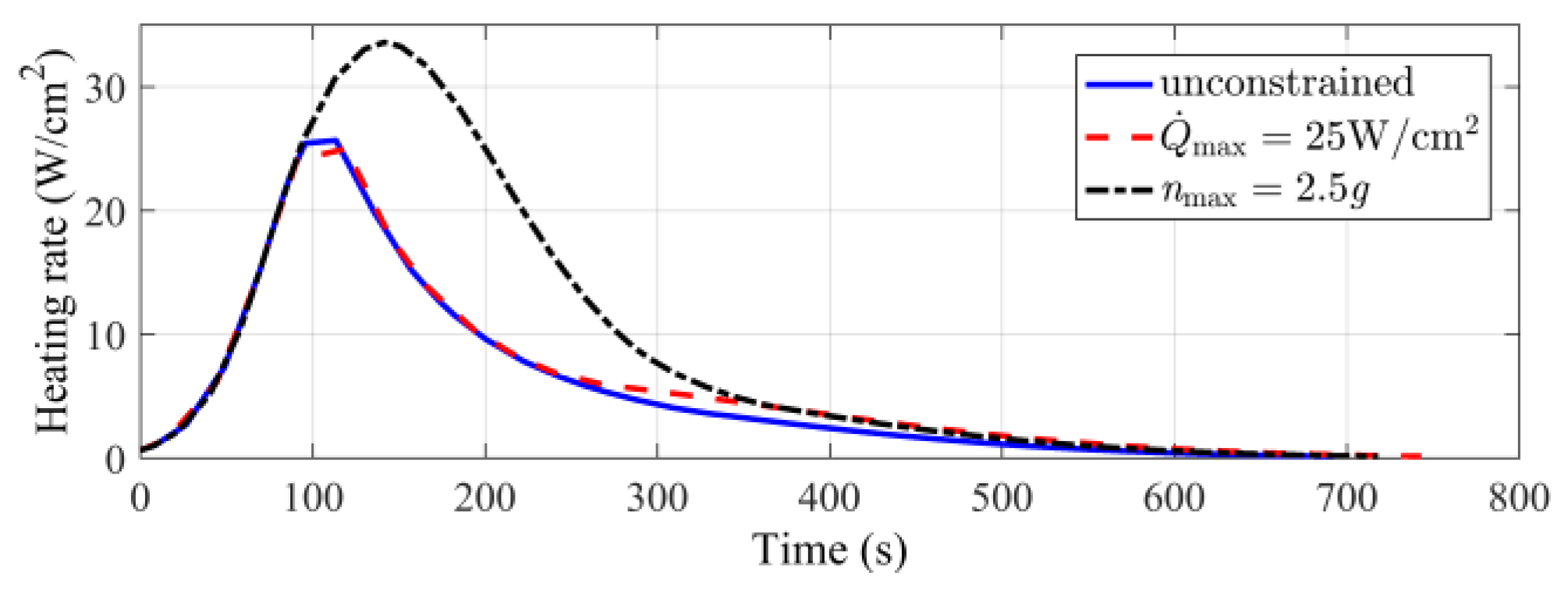
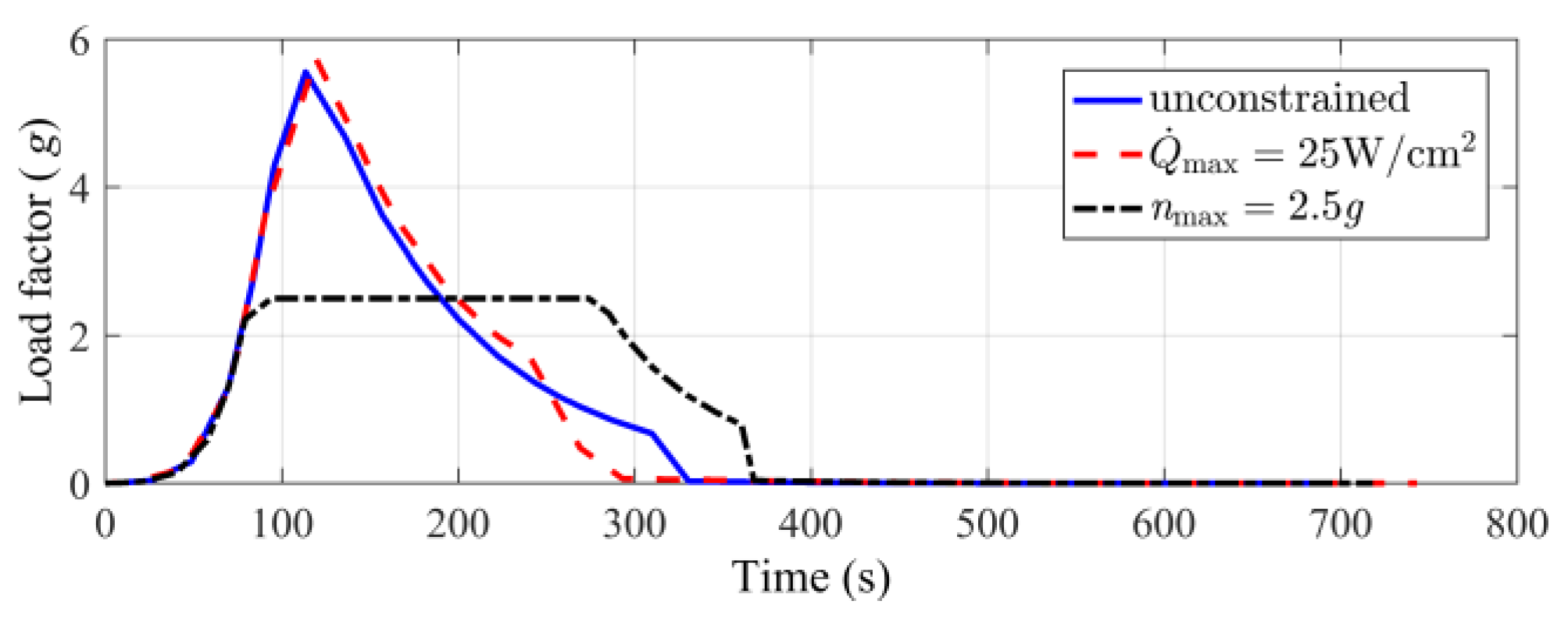
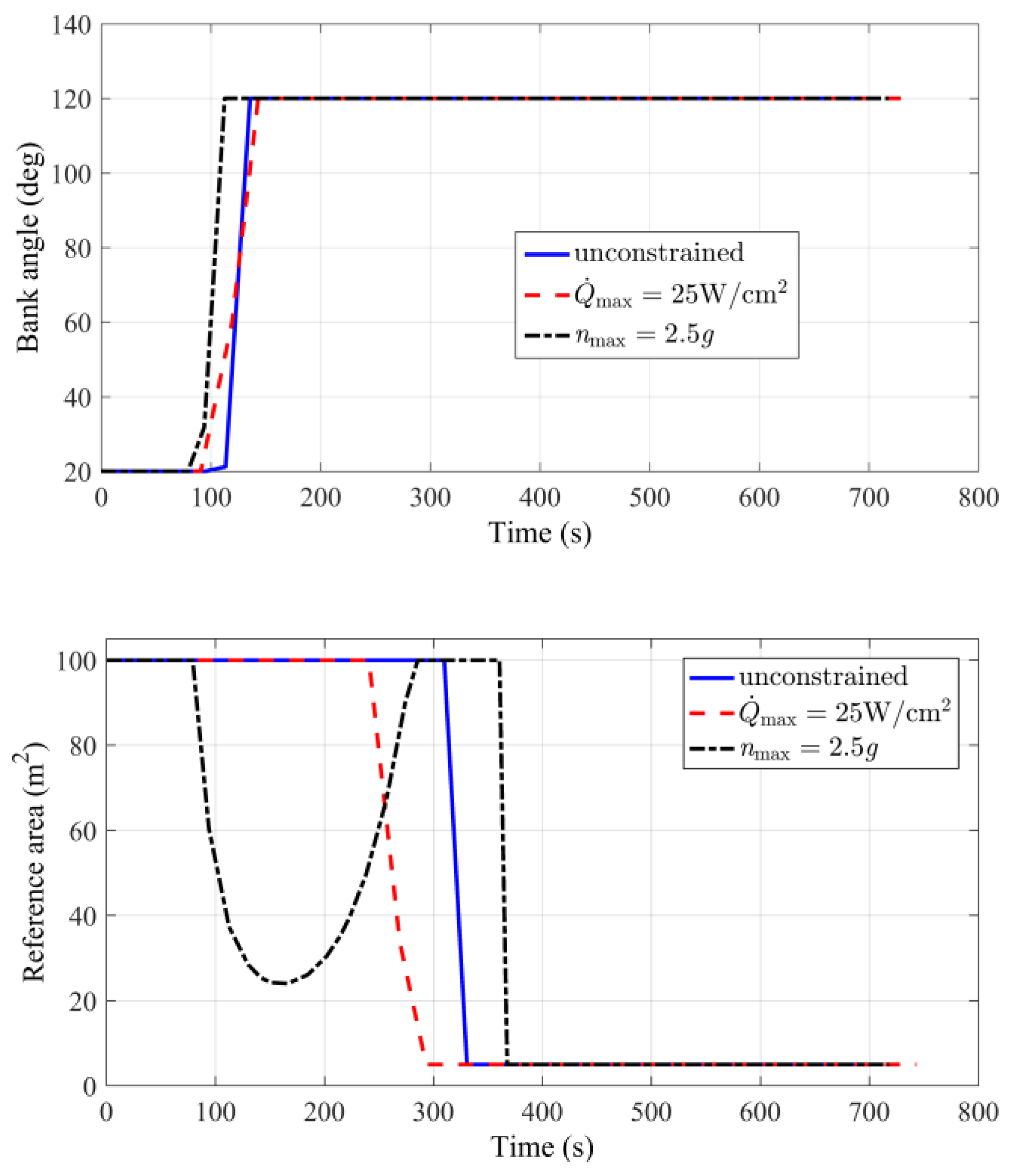
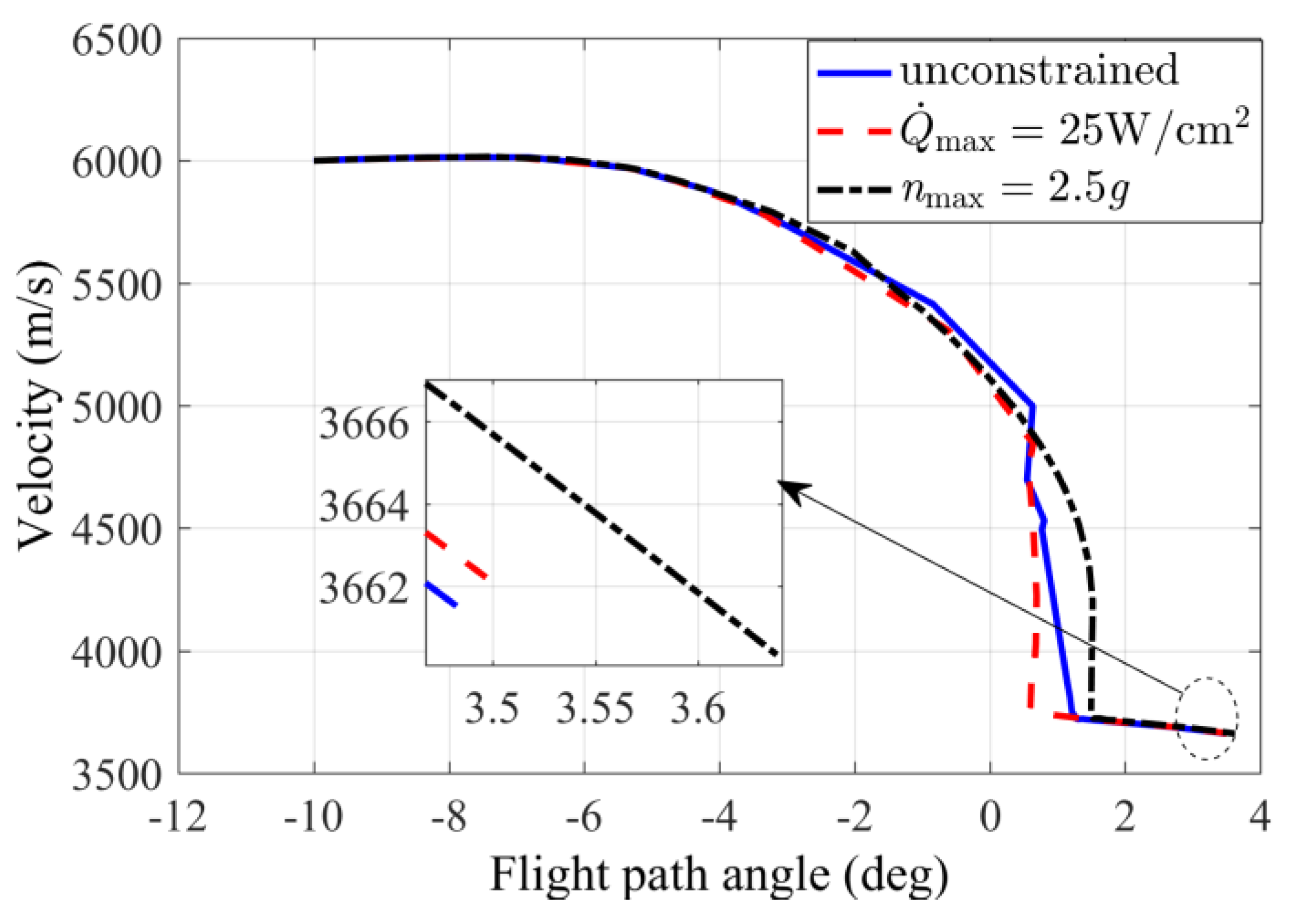
4.1. Influences of Path Constraint
4.2. Impact of Control Variable Margins
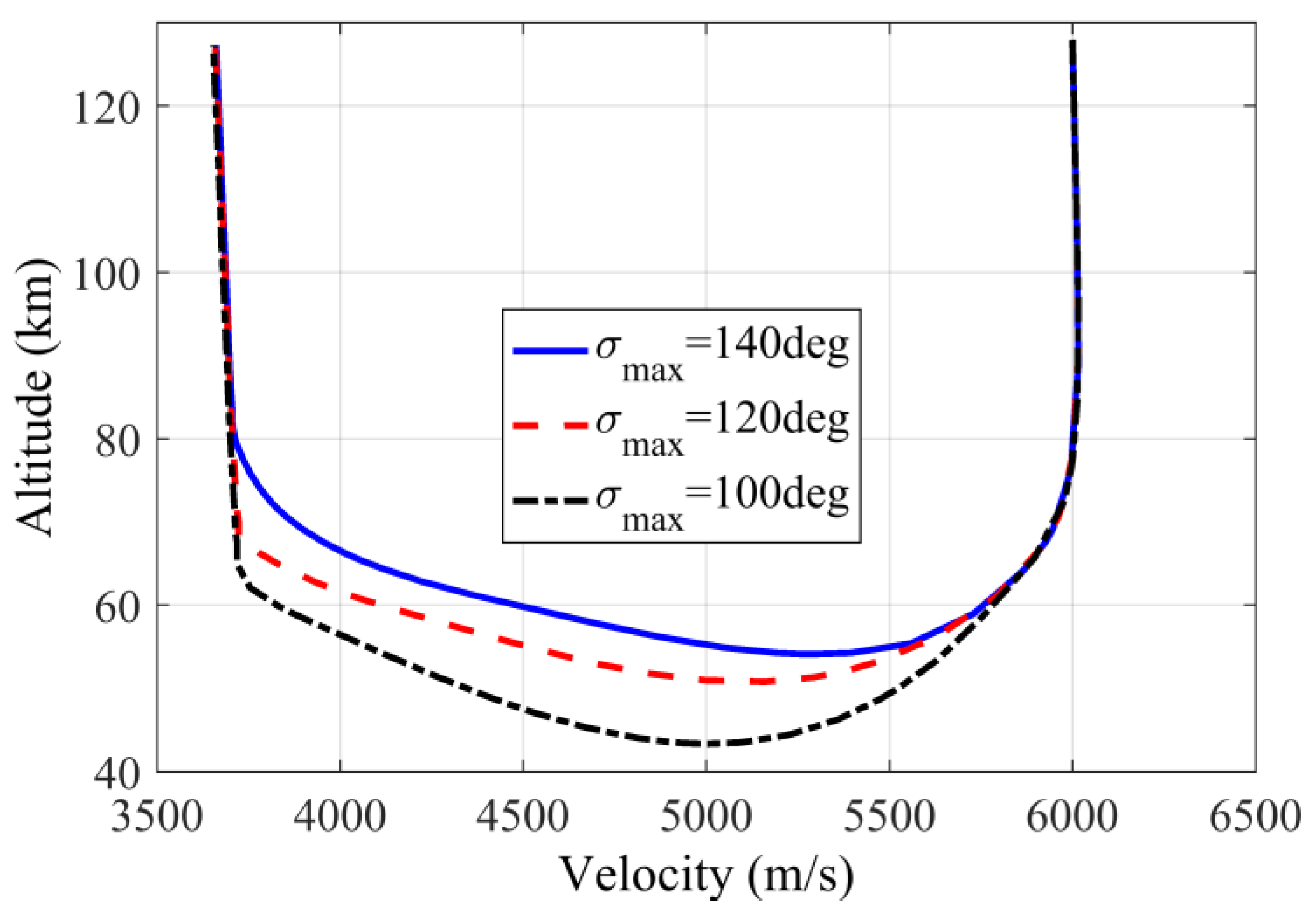
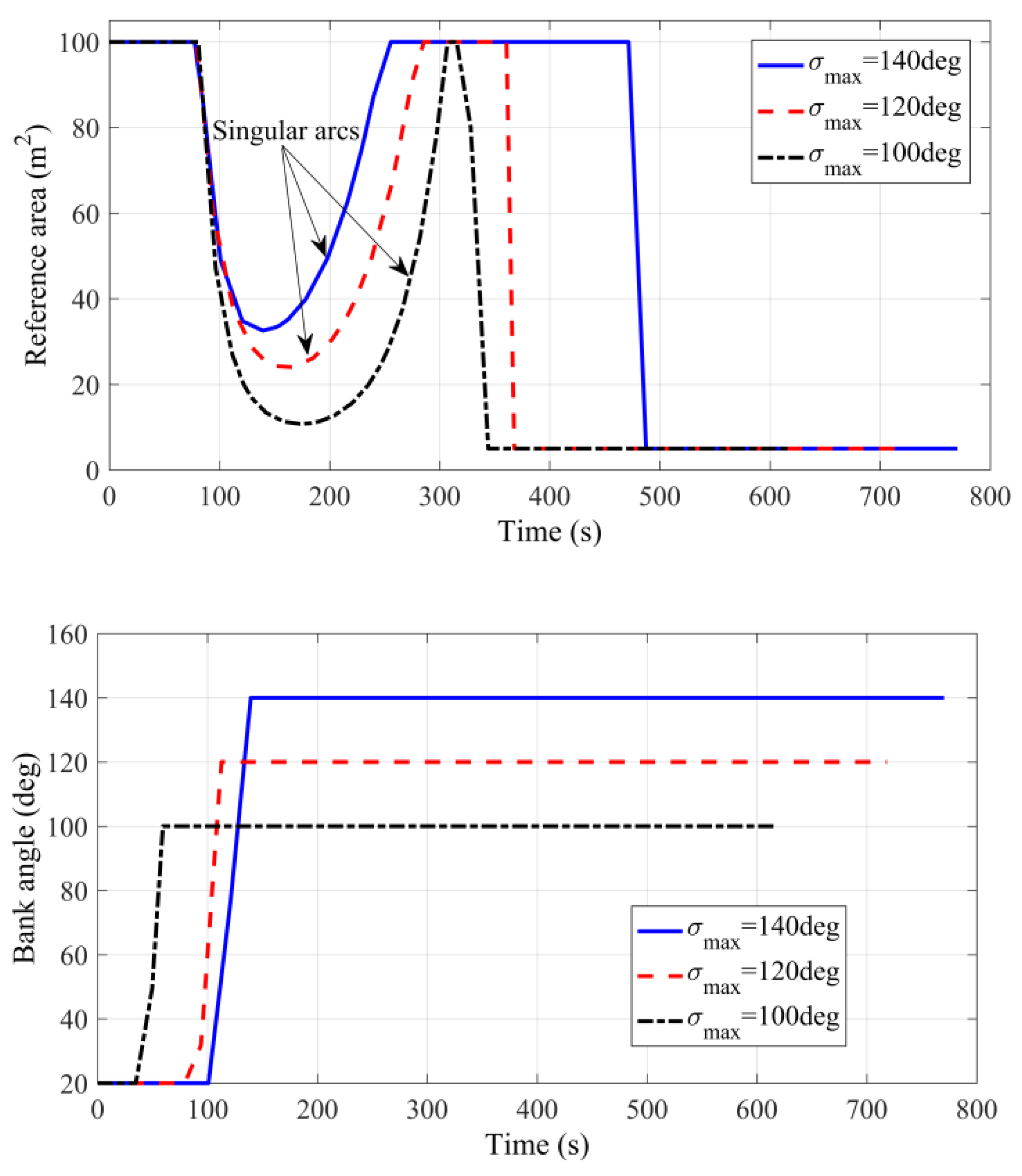
4.2.1. Upper Bounds of the Bank Angle
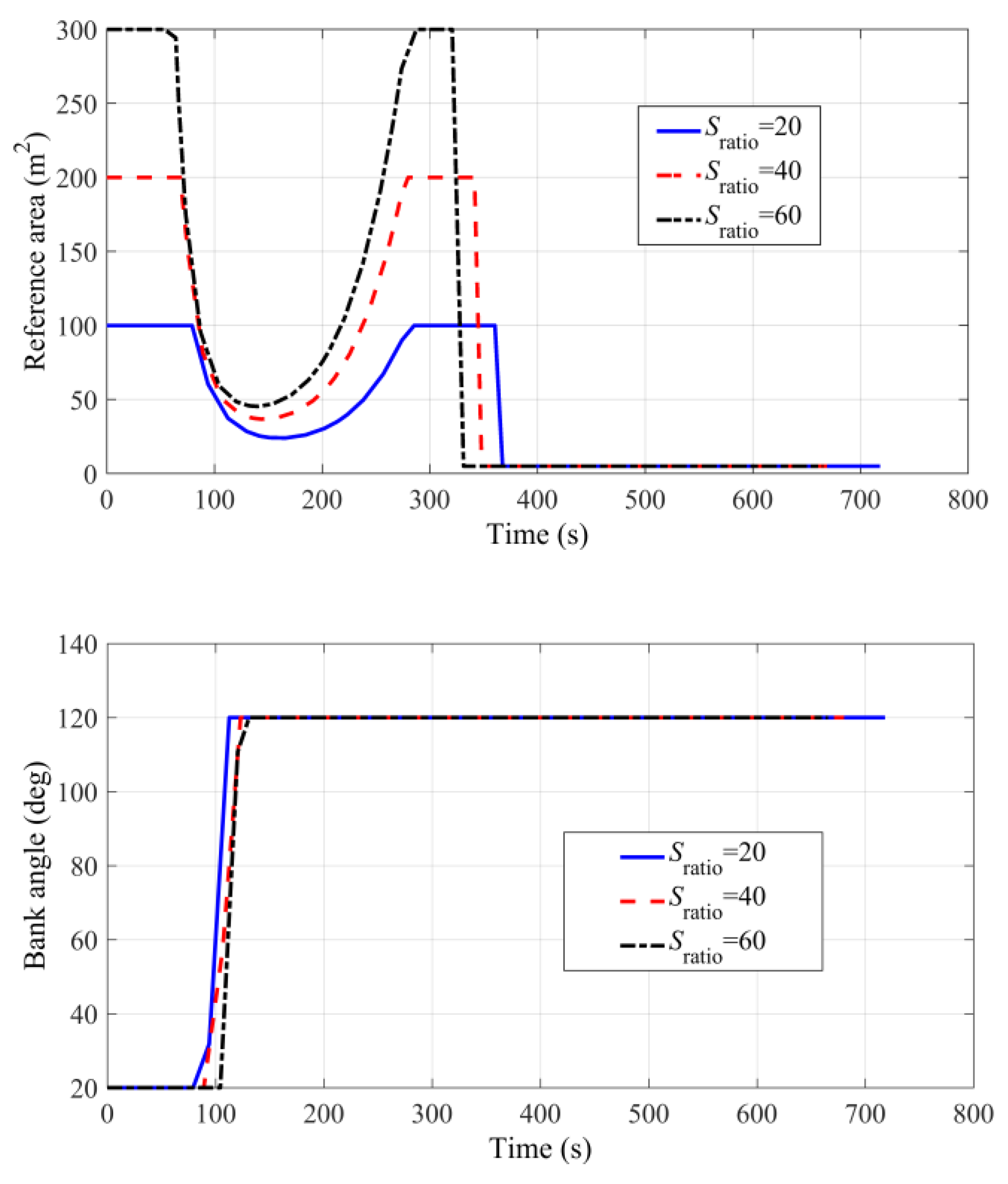
4.2.2. Reference Area Ratios
4.3. Optimal Trajectories with Different Target Orbits
4.3.1. Different Target Orbit Altitudes
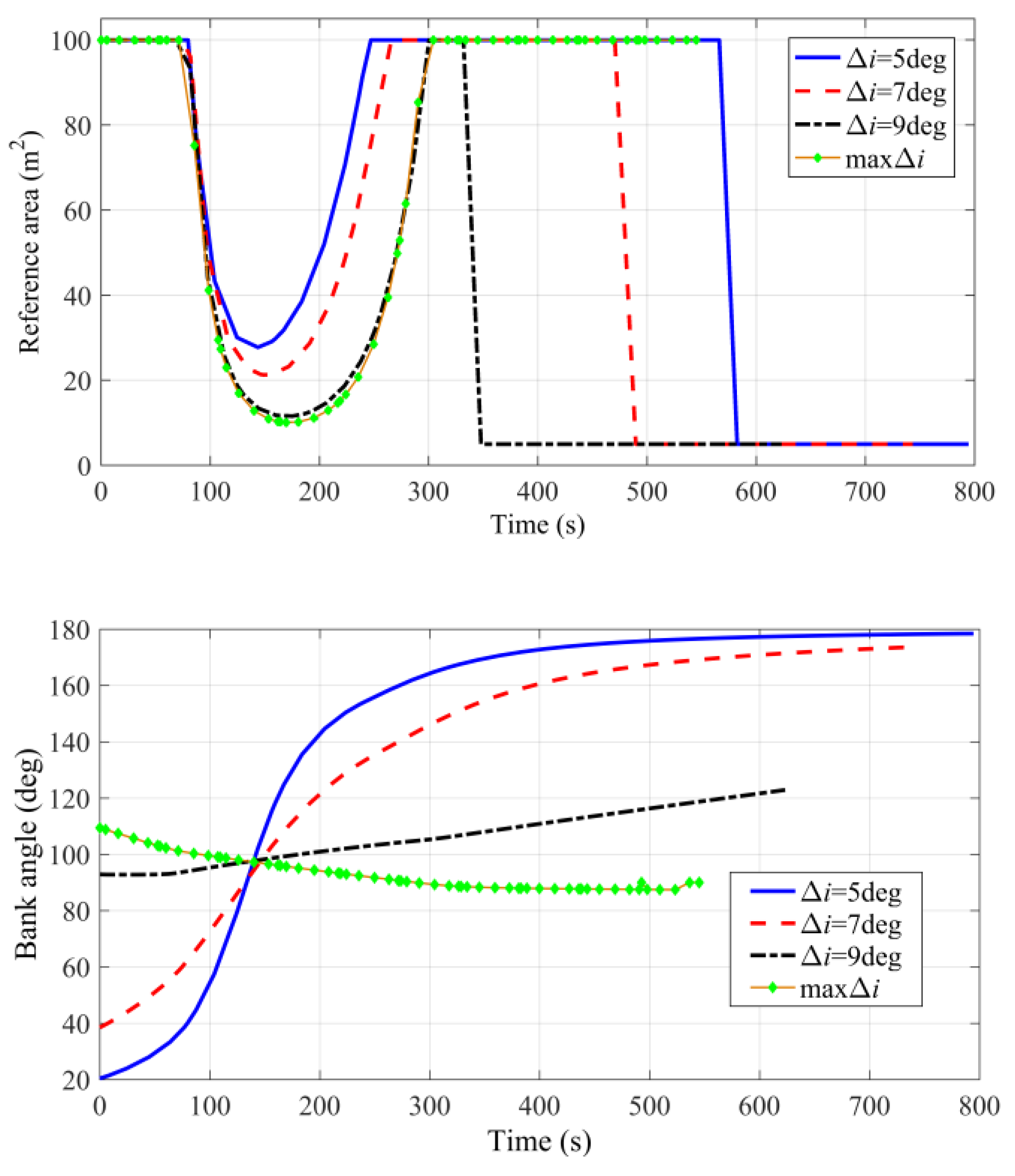
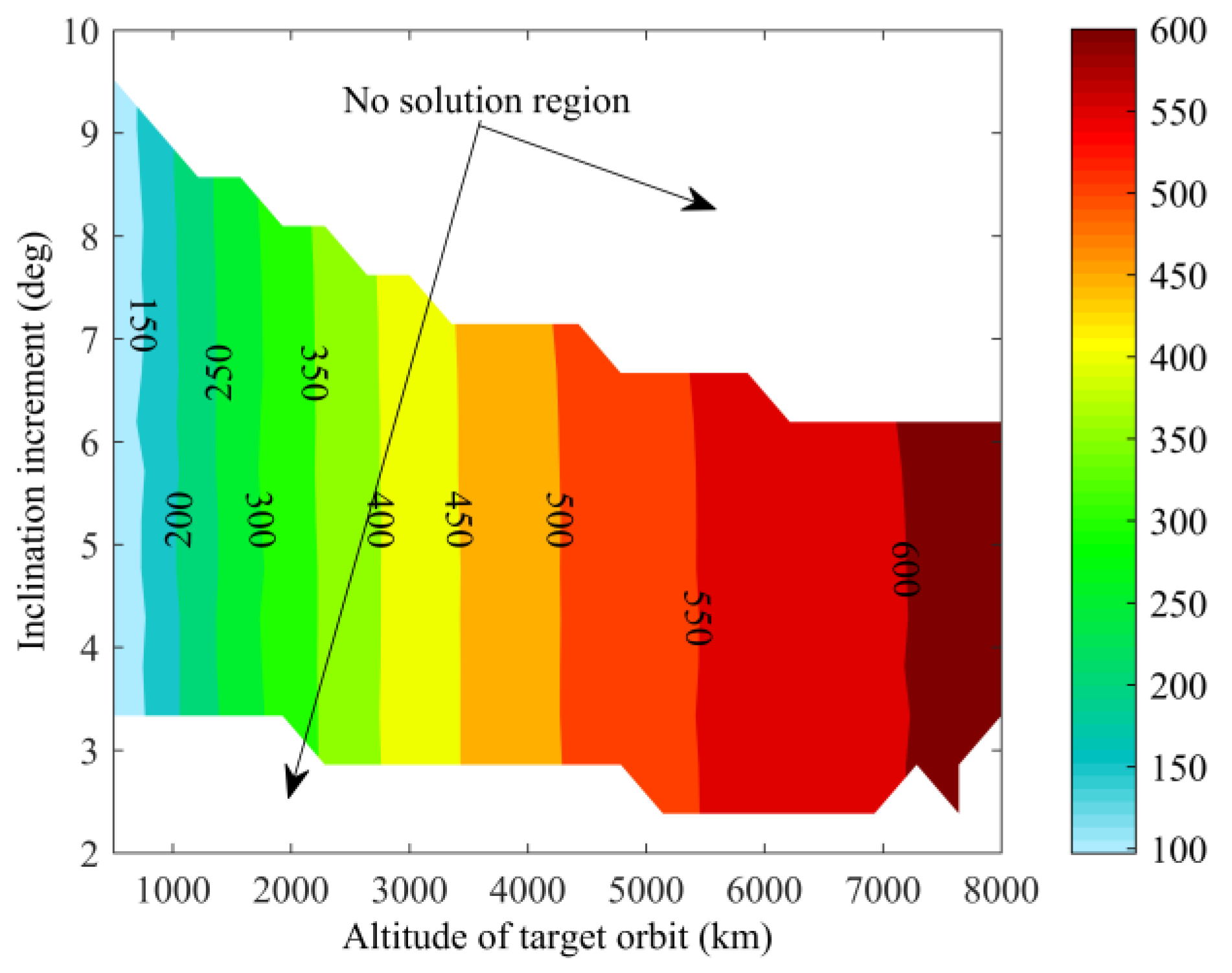
4.3.2. Different Inclination Increments
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Parkinson, R.C. Why space is expensive-operational/economic aspects of space transport. Proc. IMechE. Part G J. Aerosp. Eng. 1991, 205, 45–52. [Google Scholar] [CrossRef]
- Gurley, J.G. Guidance for an aerocapture maneuver. J. Guid. Control. Dyn. 1993, 16, 505–510. [Google Scholar] [CrossRef]
- Wetzel, T.A.; Moerder, D.D. Vehicle/trajectory optimization for aerocapture at Mars. J. Astronaut. Sci. 1993, 42, 71–89. [Google Scholar]
- Miller, K.L.; Gulik, D.; Lewis, J.; Trochman, B.; Stein, J.; Lyons, D.T.; Wilmoth, R.G. Trailing Ballute Aerocapture: Concept and Feasibility Assessment. In Proceedings of the 39th AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, Huntsville, Alabama, 20–23 July 2003; pp. 2003–4655. [Google Scholar]
- Rohrschneider, R.R.; Braun, R.D. Survey of ballute technology for aerocapture. J. Spacecr. Rockets 2007, 44, 10–23. [Google Scholar] [CrossRef] [Green Version]
- Kozynchenko, A.I. Development of optimal and robust predictive guidance technique for Mars aerocapture. Aerosp. Sci. Technol. 2013, 30, 150–162. [Google Scholar] [CrossRef]
- Putnam, Z.R.; Braun, R.D. Drag-Modulation Flight-Control System Options for Planetary Aerocapture. J. Spacecr. Rocket. 2014, 51, 139–150. [Google Scholar] [CrossRef]
- Knittel, J.M.; Lewis, M.J. Concurrent aerocapture with orbital plane change using starbody waveriders. J. Astronaut. Sci. 2015, 61, 1–22. [Google Scholar] [CrossRef]
- Ai, Y.; Cui, H.; Zheng, Y. Identifying method of entry and exit conditions for aerocapture with near minimum fuel consumption. Aerosp. Sci. Technol. 2016, 58, 582–593. [Google Scholar] [CrossRef]
- Lyons, D.T.; Beerer, J.G. Mars global surveyor: Aerobraking mission overview. J. Spacecr. Rocket. 1999, 36, 307–313. [Google Scholar] [CrossRef] [Green Version]
- Smith, J.C.; John, C.; Bell, J.L. 2001 Mars Odyssey Aerobraking. J. Spacecr. Rocket. 2005, 42, 406–415. [Google Scholar] [CrossRef]
- Gladden, R.E. Mars reconnaissance orbiter: Aerobraking sequencing operations and lessons learned. Space Oper. Commun. 2009, 6, 1–10. [Google Scholar]
- Pontani, M.; Teofilatto, P. Post-aerocapture orbit selection and maintenance for the Aerofast mission to Mars. Acta Astronaut. 2012, 79, 168–178. [Google Scholar] [CrossRef]
- Lu, P.; Cerimele, C.J.; Tigges, M.A. Optimal Aerocapture Guidance. J. Spacecr. Rockets 2015, 38, 553–565. [Google Scholar]
- Haya-Ramos, R.; Blanco, G.; Pontijas, I.; Bonetti, D.; Freixa, J.; Parigini, C.; Bassano, E.; Carducci, R.; Sudars, M.; Denaro, A.; et al. The design and realization of the IXV Mission Analysis and Flight Mechanics. Acta Astronaut. 2016, 124, 39–52. [Google Scholar] [CrossRef]
- Cianciolo, A.M.; Davis, J.L. Entry, Descent and Landing Systems Analysis Study; NASA Technical Report; TM-2010-216720; NASA Langley Research Center: Hampton, VA, USA, 2010. [Google Scholar]
- Coustenis, A.; Atkinson, D.; Balint, T.; Beauchamp, P.; Atreya, S.; Lebreton, J.-P.; Lunine, J.; Matson, D.; Erd, C.; Reh, K.; et al. Atmospheric planetary probes and balloons in the solar system. Proc. IMechE Part G J. Aerosp. Eng. 2011, 225, 154–180. [Google Scholar] [CrossRef]
- Cianciolo, A.M.; Davis, J.L. Entry, Descent and Landing Systems Analysis Study; NASA Technical Report; TM-2011-217055; NASA Langley Research Center: Hampton, VA, USA, 2011. [Google Scholar]
- Dyke, R.E.; Hrinda, G.A. Aeroshell design techniques for aerocapture entry vehicles. Acta Astronaut 2007, 61, 1029–1042. [Google Scholar] [CrossRef] [Green Version]
- Girija, A.P.; Lu, Y.; Saikia, S.J. Feasibility and mass-benefit analysis of aerocapture for missions to Venus. J. Spacecr. Rocket. 2020, 57, 58–73. [Google Scholar] [CrossRef]
- Albert, S.W.; Schaub, H.; Braun, R.D. Flight Mechanics Feasibility Assessment for Co-Delivery of Direct-Entry Probe and Aerocapture Orbiter. J. Spacecr. Rocket. 2020, 59, 19–32. [Google Scholar] [CrossRef]
- Lu, P. Entry guidance: A unified method. J. Guid. Control. Dyn. 2014, 37, 713–728. [Google Scholar] [CrossRef]
- Rao, A.V.; Benson, D.A.; Darby, C.L.; Patterson, M.A.; Francolin, C.; Sanders, I.; Huntington, G.T. Algorithm 902: GPOPS, A MATLAB software for solving multiple-phase optimal control problems using the Gauss pseudospectral method. ACM Trans. Math. Softw. 2010, 37, 163–172. [Google Scholar] [CrossRef]
- Darby, C.L.; Hager, W.W.; Rao, A.V. Direct trajectory optimization using a variable low-order adaptive pseudospectral method. J. Spacecr. Rocket. 2011, 48, 433–445. [Google Scholar] [CrossRef]
- Darby, C.L.; Hager, W.W.; Rao, A.V. An hp-adaptive pseudospectral method for solving optimal control problems. Optim. Control. Appl. Methods 2010, 32, 476–502. [Google Scholar] [CrossRef]
- Gill, P.E.; Murray, W.; Saunders, M.A. SNOPT: An SQP algorithm for large-scale constrained optimization. SIAM J. Optim. 2002, 12, 979–1006. [Google Scholar] [CrossRef]
- Lockwood, M.K. Neptune aerocapture systems analysis. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference and Exhibit, Providence, RI, USA, 16–19 August 2004. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| Gravitational parameter μ | 42,828 | m3/s2 |
| Atmospheric density of the surface of Mars ρ0 | 0.01474 | kg/m3 |
| Atmospheric density coefficient β | 1/8805.7 | m−1 |
| Mass of the vehicle m | 2000 | kg |
| Mars radius RM | 3396 | km |
| Maximum altitude of sensible atmosphere hatm | 128 | km |
| Lift coefficient of the vehicle CL | 0.4 | -- |
| Drag coefficient of the vehicle CD | 1.2 | -- |
| Parameter | r0(km) | |||||
|---|---|---|---|---|---|---|
| Value | 3524 | 6000 | −10 | 0 | 0 | 0 |
| Path Constraints | Insertion Impulses (m/s) |
|---|---|
| No constraints | 192.14 |
| Heating rate constraint | 193.27 |
| Upper Bounds of the Bank Angle σmax (deg) | Minimum Insertion Impulses J (m/s) | Peak Heating Rates (W/cm2) | Peak Dynamic Pressures (KN/m2) | Atmospheric Flight Times (min) | Minimum Altitudes (km) |
|---|---|---|---|---|---|
| σmax = 140° | 190.947 | 30.869 | 0.451 | 12.839 | 54.14 |
| σmax = 120° | 193.496 | 33.612 | 0.611 | 11.971 | 50.83 |
| σmax = 100° | 200.457 | 47.344 | 1.364 | 10.268 | 43.36 |
| Reference Area Ratios, Sratio | Minimum Insertion Impulses J, m/s | Peak Heating Rates, W/cm2 | Peak Dynamic Pressures, KN/m2 | Atmospheric Flight Times, min | Minimum Altitudes, km |
|---|---|---|---|---|---|
| Sratio = 20 | 190.947 | 30.869 | 0.451 | 12.839 | 50.83 |
| Sratio = 40 | 193.496 | 33.612 | 0.611 | 11.971 | 54.69 |
| Sratio = 60 | 200.457 | 47.344 | 1.364 | 10.268 | 56.63 |
| Altitude of Target Orbit ht, km | Minimum Insertion Impulses J, m/s | Peak Heating Rates, W/cm2 | Peak Dynamic Pressures, KN/m2 | Atmospheric Flight Times, min |
|---|---|---|---|---|
| ht = 50 | 102.097 | 34.977 | 0.682 | 15.196 |
| ht = 3000 | 419.954 | 31.373 | 0.502 | 8.7498 |
| ht = 5500 | 552.492 | 30.790 | 0.456 | 7.6179 |
| ht = 8000 | 615.797 | 30.724 | 0.435 | 7.0521 |
| Inclination Increment Δi, deg | Minimum Insertion Impulses J, m/s | Peak Heating Rates, W/cm2 | Peak Dynamic Pressures, KN/m2 | Atmospheric Flight Times, min |
|---|---|---|---|---|
| Δi = 5 | 189.961 | 32.789 | 52.758 | 13.242 |
| Δi = 7 | 190.597 | 36.290 | 50.078 | 12.392 |
| Δi = 9 | 198.490 | 46.096 | 44.120 | 10.389 |
| Δi = 9.181 (max) | 207.036 | 49.192 | 42.874 | 9.0864 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Sun, G.; Han, H. Aerocapture Optimization Method with Lift–Drag Joint Modulation Suitable for Variable Structure Spacecraft. Aerospace 2023, 10, 24. https://doi.org/10.3390/aerospace10010024
Li Y, Sun G, Han H. Aerocapture Optimization Method with Lift–Drag Joint Modulation Suitable for Variable Structure Spacecraft. Aerospace. 2023; 10(1):24. https://doi.org/10.3390/aerospace10010024
Chicago/Turabian StyleLi, Yongyuan, Guang Sun, and Hongwei Han. 2023. "Aerocapture Optimization Method with Lift–Drag Joint Modulation Suitable for Variable Structure Spacecraft" Aerospace 10, no. 1: 24. https://doi.org/10.3390/aerospace10010024