1. Introduction
Stroke is one of the main causes of long-term disability worldwide and the most common in Western countries [
1]. The number of patients having difficulties in performing daily-living activities due to physical disabilities is constantly increasing, making the availability of therapists and caregivers more and more inadequate and, therefore, creating an unmet market need.
Robotic devices for neurorehabilitation have been widely investigated, developed and introduced in the market to offer a valid alternative to conventional therapy and fill the constantly growing gap between supply and demand [
2,
3]. Since the invention of the MIT-Manus [
4], robot-assistance, force-feedback and force-based control are sought after features of neurorehabilitation devices [
5], enabling them to sense the patient’s interaction with the robot, react accordingly and adapt the level of physical assistance provided. Most of the proposed robots are technically advanced, but are relatively expensive and designed for clinical settings, which makes it hard for patients to afford such treatment. There are also examples of commercial general-purpose industrial manipulators, properly equipped with force-based control algorithms, exploited in rehabilitation scenarios [
6,
7,
8]. They can be very flexible and useful for testing purposes but, on the other side, they are inherently relatively expensive with respect to rehabilitation budget requirements.
Focusing on upper-limb rehabilitation, a number of low-cost rehabilitation devices are currently available, typically passive or passively gravity-balanced [
9]. Nevertheless, the lack of actuation, of an assist-as-needed support and of haptic capabilities, preclude them to be effectively used by patients with low/medium motion capabilities. The development of low-cost rehabilitation devices also meets the need of low-income countries where the healthcare system is lacking and the medical personnel is insufficient. In these countries, where even hospitals cannot afford expensive mechanical devices, the challenge is to conceive and develop low-cost and easily-replicable systems for rehabilitation, as far as possible.
Some tabletop actuated devices have been specifically developed with the aim of satisfying economic and installation requirements in out-of-clinic environments. These solutions often rely on reduced complexity and optimized costs by limiting the number of degrees of freedom with respect to complex rehabilitation devices, such as exoskeletons [
10,
11,
12], in order to partially meet the affordability requirements. However, strictly reducing the number of degrees of freedom of exoskeletons can sometimes lead to drawbacks. The authors of [
13] developed an interesting elbow rehabilitation device; but, since the architecture is not supported or constrained to a fixed structure, the device weighs on the shoulder of the patient with a consequent lack of rehabilitation for that specific body part.
The large majority of tabletop devices are constituted by rigid links and joints. Nevertheless, it is worth to mention the existence of alternative solutions. CUBE is a tabletop cable-driven device enabling 3D-movements of the upper limb [
14]. Despite its peculiar and interesting kinematic architecture, it does not provide a steady support for the hand in spatial movements since its end-effector is constrained only by two groups of three wires. MOTORE is an interesting mobile robot for upper-limb rehabilitation, but the need of resting completely the forearm on the device can constrain the upper arm excessively and lead to a high elevation angle of the elbow [
15].
Alternative solutions can mobilize the upper arm for specific movements, but do not allow a wide movement of the upper limb, both in terms of shoulder and elbow. For instance, Nam et al. developed a portable device, capable of mobilizing the pronosupination of the forearm, unusual capability for tabletop devices [
16]. However, its kinematic structure does not allow the rehabilitation of the upper limb in an extensive range of motion, since it does not provide any mobilization of the shoulder.
Moreover, planar movements are largely used for upper-limb neurorehabilitation and they represent the basis for interesting works such as the one proposed by Zadravec et al., in which a solution to model the planar movement trajectory formation [
17] is suggested. By referring to articulated kinematic structures, it is possible to highlight a characteristic shared among different devices. The human body is inherently symmetric with respect to the sagittal plane. Nevertheless, several devices are characterized by a non-symmetric structure that could cause kinetostatic performance and manipulability ellipses to also be asymmetric with respect the sagittal plane. Asymmetrical kinematic structures produce asymmetrical shapes of the manipulability ellipsis, leading to an asymmetric kinetostatic behaviour for right-handed and left-handed patients. This is true for the kinematic structure of several rehabilitation devices, such as MIT-Manus [
4], Braccio di Ferro [
18] and NURSE [
19].
Focusing on symmetrical kinetostatic behaviour with respect to the sagittal plane, some paradigmatic devices can be found. Some of them exploit Cartesian kinematic architectures, both serial and parallel. Wu et al. developed an admittance-controlled Cartesian serial kinematic architecture [
20], while Zollo et al. proposed a planar orthogonal parallel rehabilitation device [
21]. Both these devices are characterized by an inherent isotropic kinetostatic behaviour. However, in the opinion of the authors, such architectures are relatively cumbersome and complex and would not allow an effective commercial exploitation, especially in low-budget rehabilitation scenarios. An additional solution is provided by the H-MAN [
22], a differential-based isotropic planar device for upper-limb rehabilitation. Although the authors consider its design outstanding, the goal of this work was to develop a device able to exploit extensively the range of motion of the upper limb, without leading to a relatively bulky structure. In these terms, the notable architecture of H-MAN would have resulted in a big and not straightforwardly portable device if properly scaled to allow large movements of the upper limb, mainly because of its Cartesian structure.
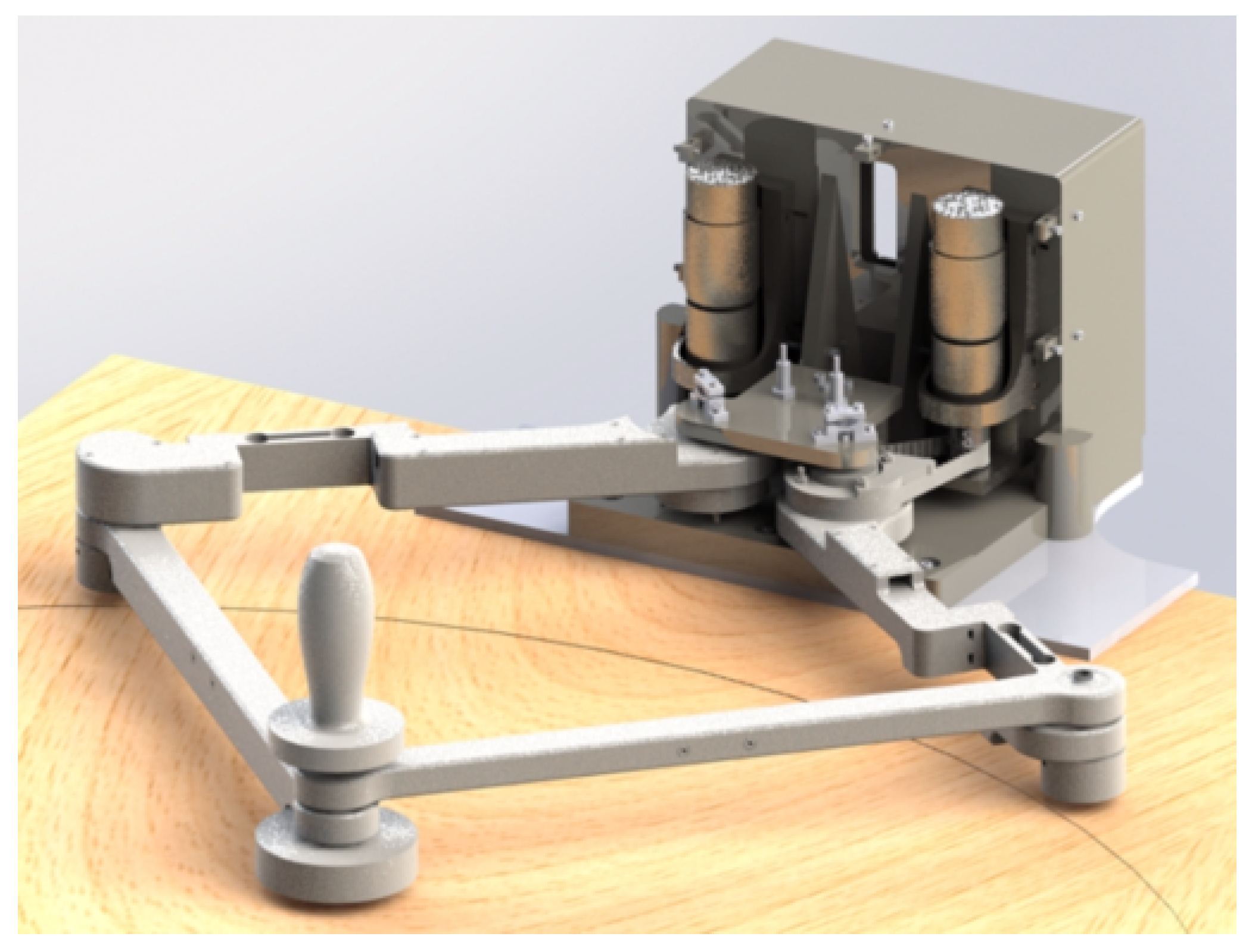
The aim of the present work was to present a rehabilitation device, namely PLANarm2, developed specifically to achieve an acceptable compromise in terms of (1) workspace symmetry with respect to the sagittal plane, (2) relatively large workspace, (3) portability and (4) affordability (
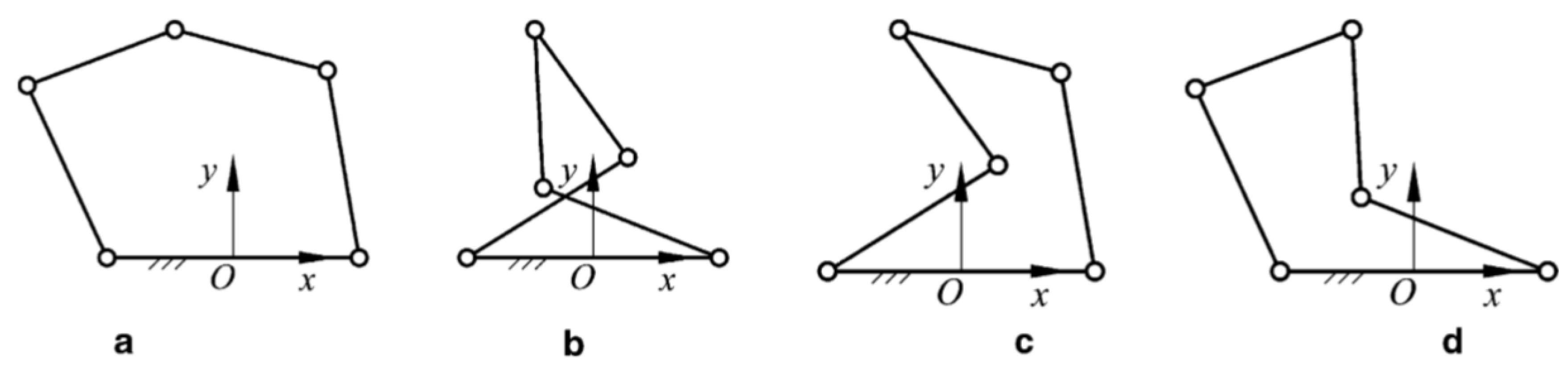
Figure 1). The well-known 5R planar kinematic chain was considered a promising solution [
23]. It is a matter of fact that this architecture has already been adopted to realize the haptic device developed by Klein et al. [
24]. Starting from the parametric model of the 5R kinematics, link lengths of PLANarm2 have been optimized to have good kinematic performances in the large majority of its workspace, properly dimensioned to overlap the range of motion of the upper limb. Its symmetric kinematic structure is inherently characterized by a symmetrically distributed kinetostatic behaviour with respect to the sagittal plane. Moreover, in order to reduce the total cost of the device, it has been designed to be clamped quite easily on a standard table and to facilitate both portability and fast installation inside already furnished environments. As opposed to the device described in [
24], which is characterized by a self-supported manipulandum, the PLANarm2 manipulandum slides on a table or an a desk, whose surface supports the gravitational load. The links of the parallel structure only transmit horizontal forces, limiting bending loads. This allowed the device to be realized by additive manufacturing techniques with plastic material, in line with the affordability requirement.
The paper is organized as follows: the kinematic architecture is presented in
Section 2; the mechanical design and its optimization are described in
Section 3; the main components of the prototype and a brief cost analysis are reported in
Section 4; the control framework is presented in
Section 5; results of an experimental assessment are outlined in
Section 6; conclusions are drawn in
Section 7.
4. Prototype
4.1. Description
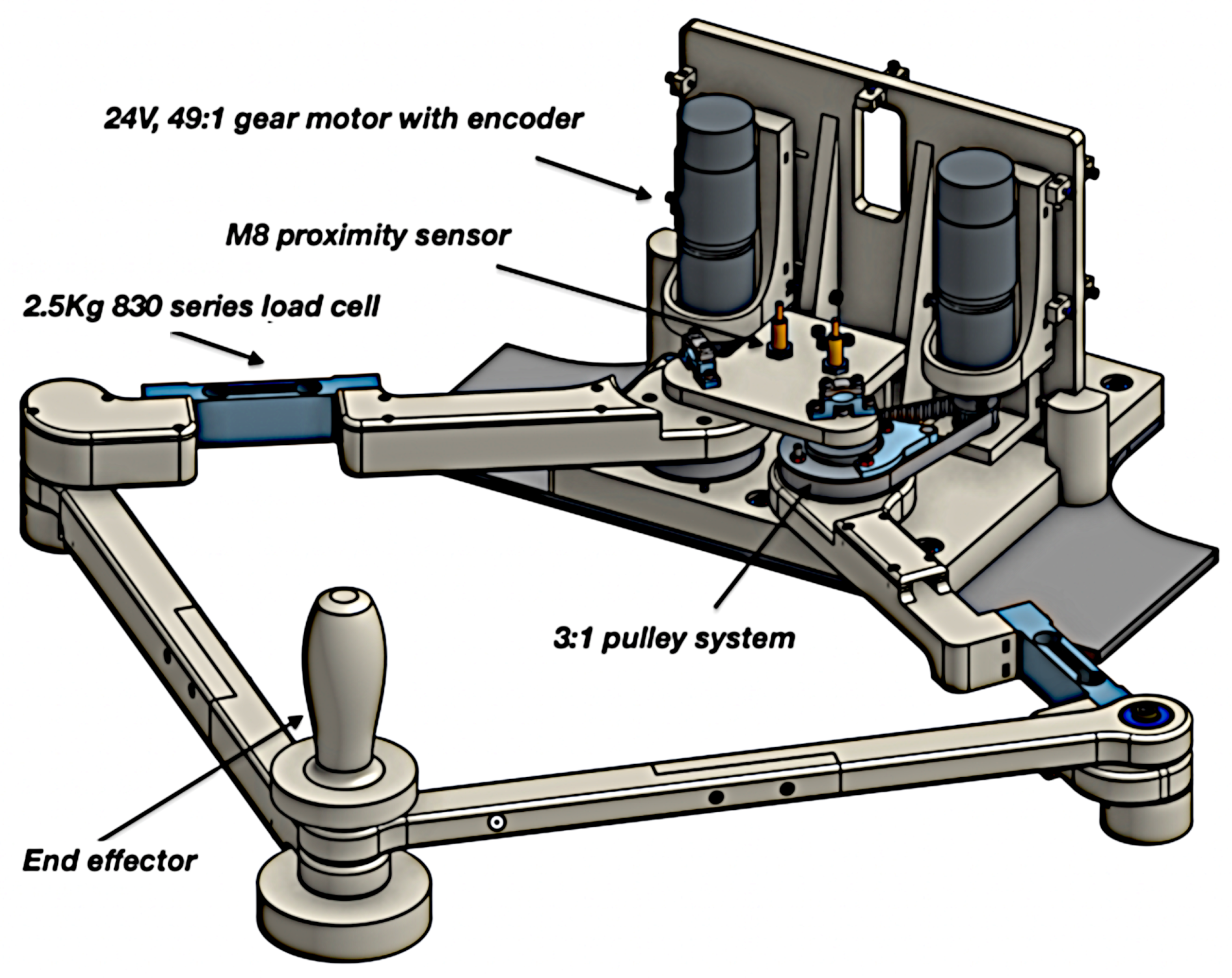
On the basis of the considerations reported in the previous sections, the PLANarm2 prototype was developed and assembled. The mechanical assembly of the manipulator is composed of five subsystems: base, motors, transmission, links and end-effector. A proper mechatronic design has to consider that the choice of all the components must be carried out keeping in mind the expected behaviour of the final controlled device.
Impedance and its dual admittance control are today part of the state-of-the-art in physical Human–Robot Interaction (pHRI) and essential control strategies for rehabilitation devices. Impedance control requires a direct force/torque control [
29] and backdrivable motors are therefore preferred. High torque and low velocity needed for this application, as reported in
Section 3.3, clash with the characteristics of electrical motors that in general express high velocity and low torque. High torque and low velocity electrical motors (i.e., torque motors) are available on the market, but they are generally expensive, and not suitable for the low-cost device described. PLANarm2 is moved by two 24 V motors (EMG49 model from Robot-electronics) equipped with a non-backdrivable 49:1 gearbox (resulting in a no-load speed of 143 rpm and a stall torque of 19.6 Nm) further reduced by a 3:1 pulley belt transmission connected to the corresponding link.
The links have been designed to embed a Cantilever Beam load cell (Model 830, Richmond Industries Ltd., Reading, UK) measuring the torque transmitted through the links actuated by motors. This solution allows to evaluate straightforwardly the torque by measuring the shear force at the cantilever sensor and multiplying it by the length of the link. This motor choice reflects in the impossibility to use an impedance control algorithm in favour of an admittance strategy, which requires force sensing and good position/velocity control. Each actuator is equipped with an incremental encoder sensor with a final resolution on the link rotation of 0.00213 rad. The low-level controller, in line with the affordability nature of the device, is represented by an Arduino DUE board (Atmel SAM3X8E based on a ARM Cortex-M3) that, in conjunction with two VNH5019 motor drivers, provides full control of the robot’s movements. The Arduino board, the motor drivers and other electronic elements required to operate, are installed on a PCB and mounted on the device. Closed control loops are processed directly by the Arduino board and not by additional commercial motor drivers. This choice has been made in order to exploit the low cost and versatility of a general purpose microcontroller unit (MCU).The MCU controller communicates with a PC through a serial RS-232. PC will be responsible for the high-level control logic and GUI for robot control.
Proximity sensors are used to detect the end stroke of each arm, as a reference for the incremental encoders. The large majority of the components have been 3D-printed. The complete mechanical structure is shown in
Figure 9.
4.2. Cost Estimation
The device is designed specifically for being an affordable rehabilitative device with a low-volume production. Given the complexity of some parts of the device and its intrinsic prototype nature, the most flexible and suitable technology for this production volume is Additive Manufacturing (AM) thanks to the ability to run a production without the long term investment in specific tooling and the flexibility on implementing any layout adjustment, upgrade or customization.
The device has been optimized to be produced out of polymeric materials on a Fused Deposition Modelling (FDM) AM machine. The specific machine used to print the device is a Stratasys F370 printer and the used materials are Stratasys ABS and Stratasys QSR soluble support material both in the mm filament diameter. The print project consists of 4 different print trays for a total of 97 printing hours, 2292 cm3 of building material and 446 cm3 of support material, with additional 25 h of washing time (most of them performed while the machine was printing other subsequent trays). The magnitude of the building cost could be roughly estimated with the cost of building material (Stratasys ABS cost: EUR/cm3 (in 2020)) added to the cost of support material (Stratasys QSR cost: EUR/cm3 (in 2020)) used along the fabrication and is approx € 501. The concept of affordability has been employed for the selection of essential components like electric motors and drivers, load cells and electronics components too, bringing the cost of bought material to a rough total of € 720. For the assembly of the structure, one single operator was able to perform the whole operation during a single working day time with no specific tools and with a few other components like standard metric screws, nuts, ball bearings and pulleys, for an additional rough cost of € 100. Two additional days were required to assemble the electrical and electronic assembly and wiring, for a rough cost of € 200. Regarding the aforementioned observations, with a total estimated cost of € 1521, PLANarm2 could be considered an affordable device for a limited production run.
5. Control
When designing a rehabilitation device, mechatronic and control aspects are equally important. Following [
30], it is possible to divide the existing control strategies for neurorehabilitation devices into three main branches: assistive, intended to help patients perform certain movements; corrective, intended to help patients improve their movement accuracy; and resistive, intended to further challenge the patient’s capabilities. The authors decided to make available all these control strategies for the user of the PLANarm2 device. In particular, the assistive mode is realized both by a passive
trajectory_controller and by an active
admittance_controller, the corrective mode is introduced through a so-called
tunnel_controller and the resistive mode is implemented as a particular case of the admittance control. In order to develop an effective and modular control architecture, the authors decided to leverage the functionalities of the
ros_control package [
31], available within the Robotic Operative System (ROS) framework [
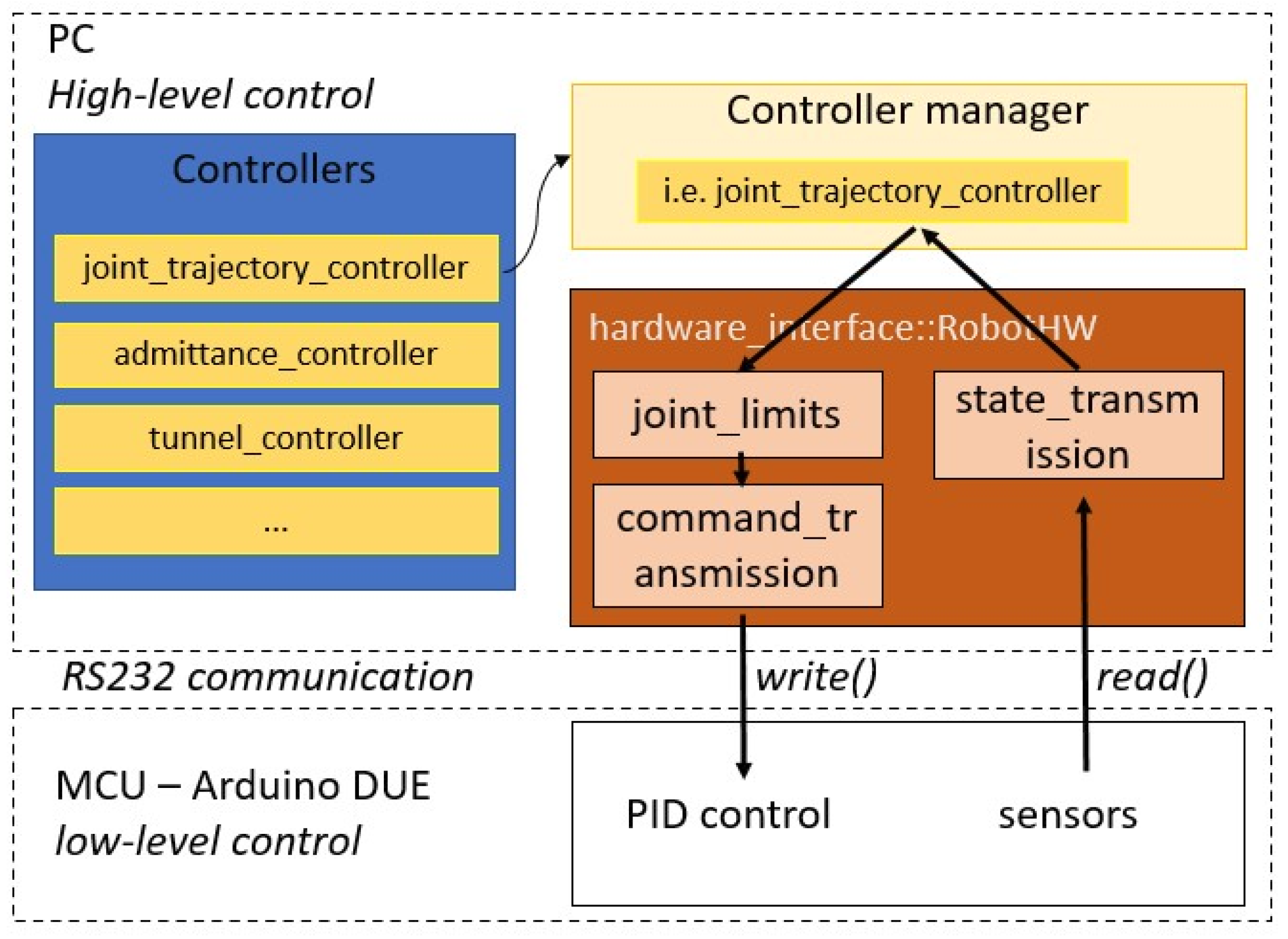
32]. With reference to
Figure 10, the control structure is made up of four main components: a controller manager, the set of available controllers, a hardware interface and the real controlled robot. The
controller manager is responsible for handling the controllers implemented in the system; it activates, deactivates and switches them depending on the user’s command. Once a specific
controller is activated, it has access to the current state of the robot and, depending on its internal algorithm, it can use that information to compute the next command to be sent to the robot. This back and forth data transmission is made possible by the
hardware interface component of the control architecture, in charge of interfacing the software portion of the system with the hardware one through the
read() and
write() methods. For this specific application, the
hardware_interface has also been equipped with a dummy transmission performing the transformation between Cartesian space and actuator space so that commands can be computed more intuitively referring to the Cartesian reference frame.
As from
Figure 10, the control structure could be split in low-level control and high-level control. The low-level portion of the control architecture is represented by the PID loops for position and velocity control running on the Arduino DUE board. These capabilities are often built-in for commercial robotic devices but, in this case, given the use of a general purpose Arduino DUE for cost-effectiveness and flexibility reasons, they must be redesigned from scratch. The high-level portion is implemented on a PC to exploit the
ros_control capabilities.
5.1. Low-Level Control
A fundamental requirement for the implementation of the PID loops is to guarantee a fixed control time step. This has been achieved by equipping the micro-controller with ChibiOS [
33], an efficient open-source Real Time Operative System (RTOS) specifically designed for embedded applications. Using ChibiOS, it is possible to guarantee a time step of 1 ms for measure and control, while ensuring a 200 Hz communication with PC via serial interface.
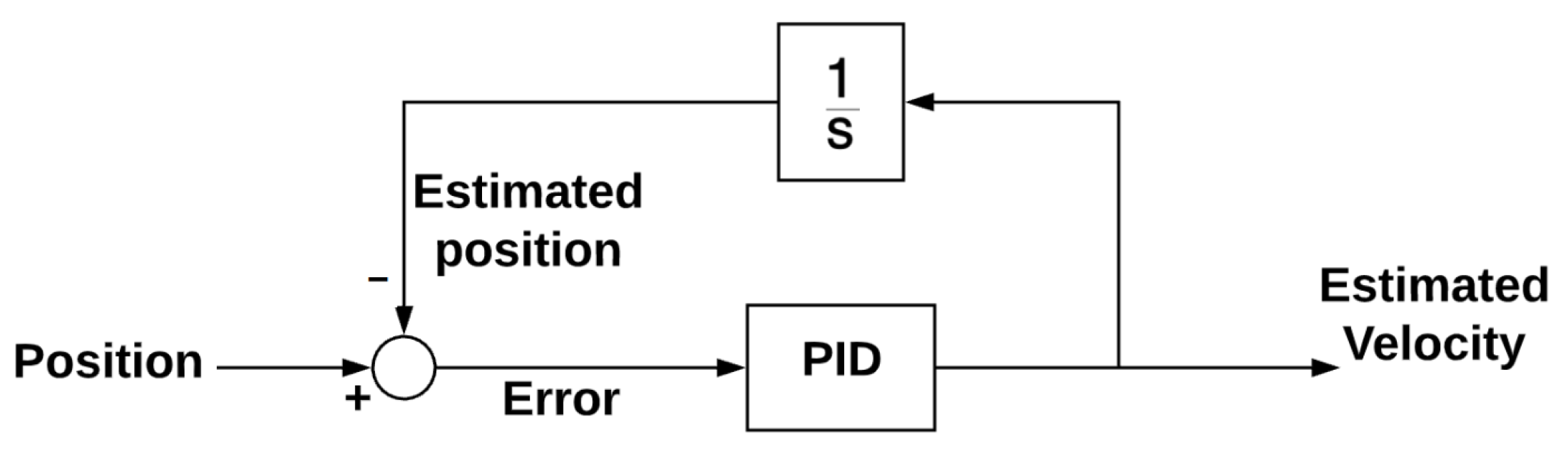
As highlighted in
Section 4, the chosen actuators are sold with an embedded incremental encoder for precise position measurement. However, no velocity sensor was installed on the motors and therefore the speed value had to be estimated using the PID loop depicted in
Figure 11.
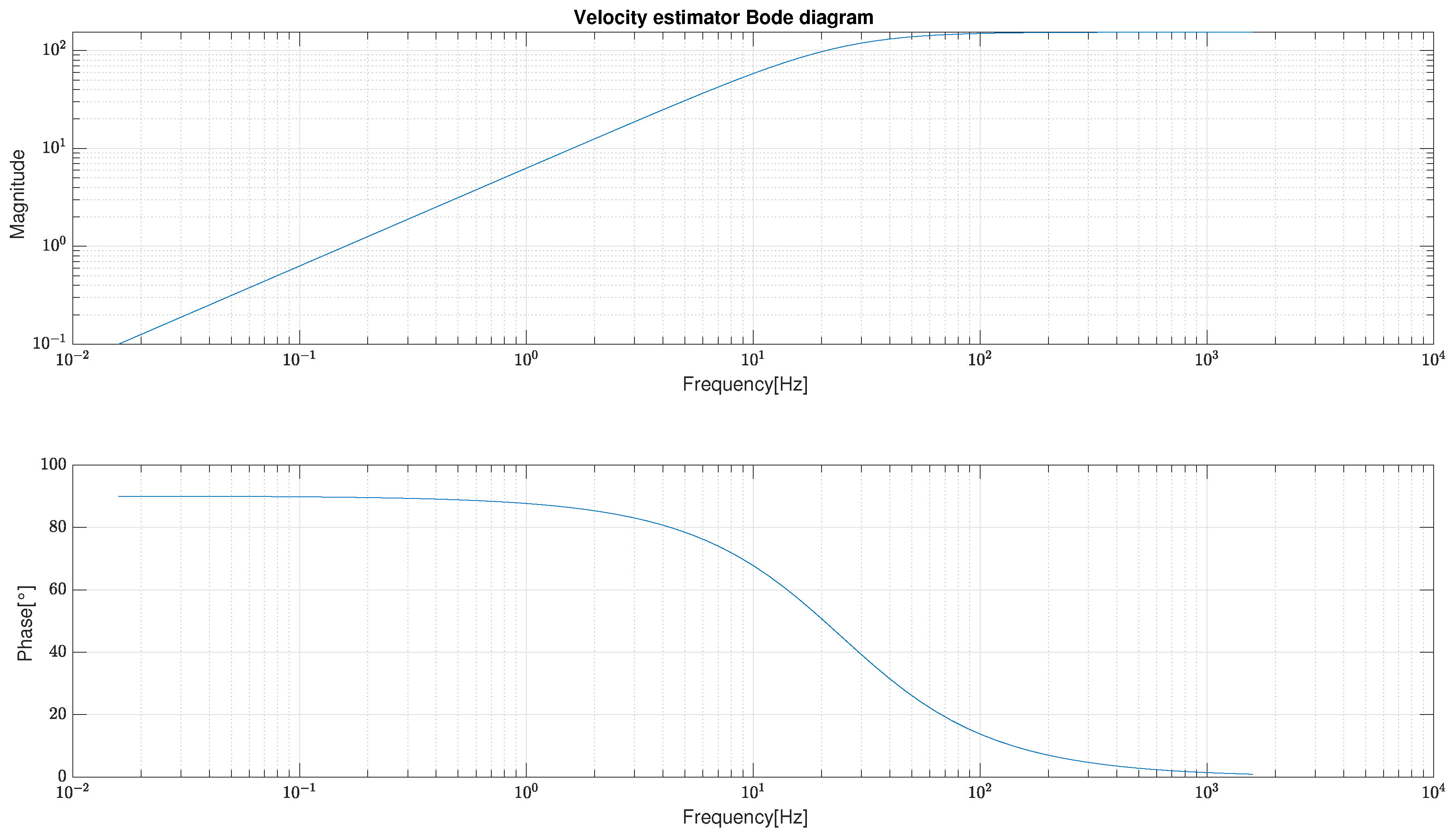
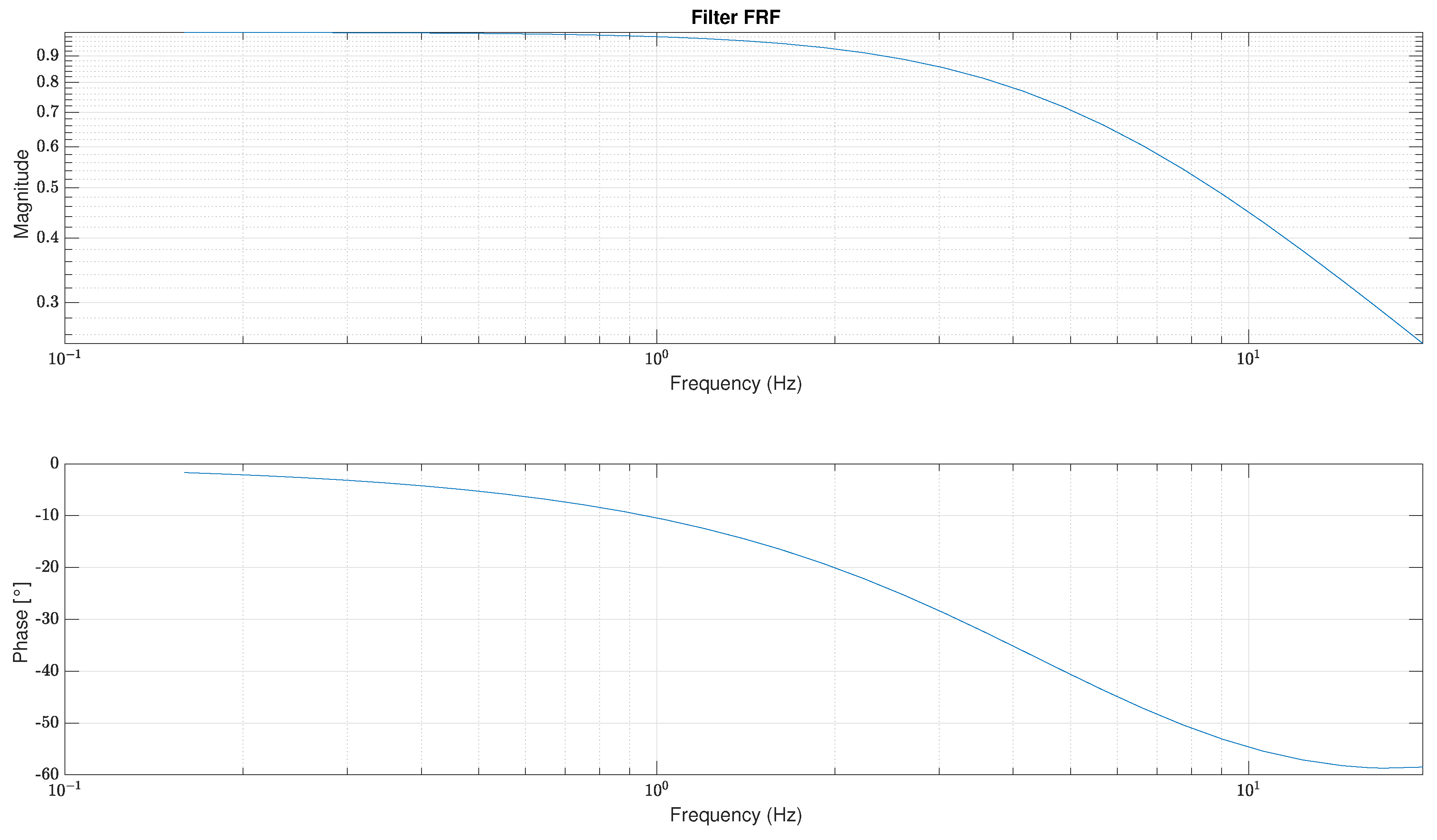
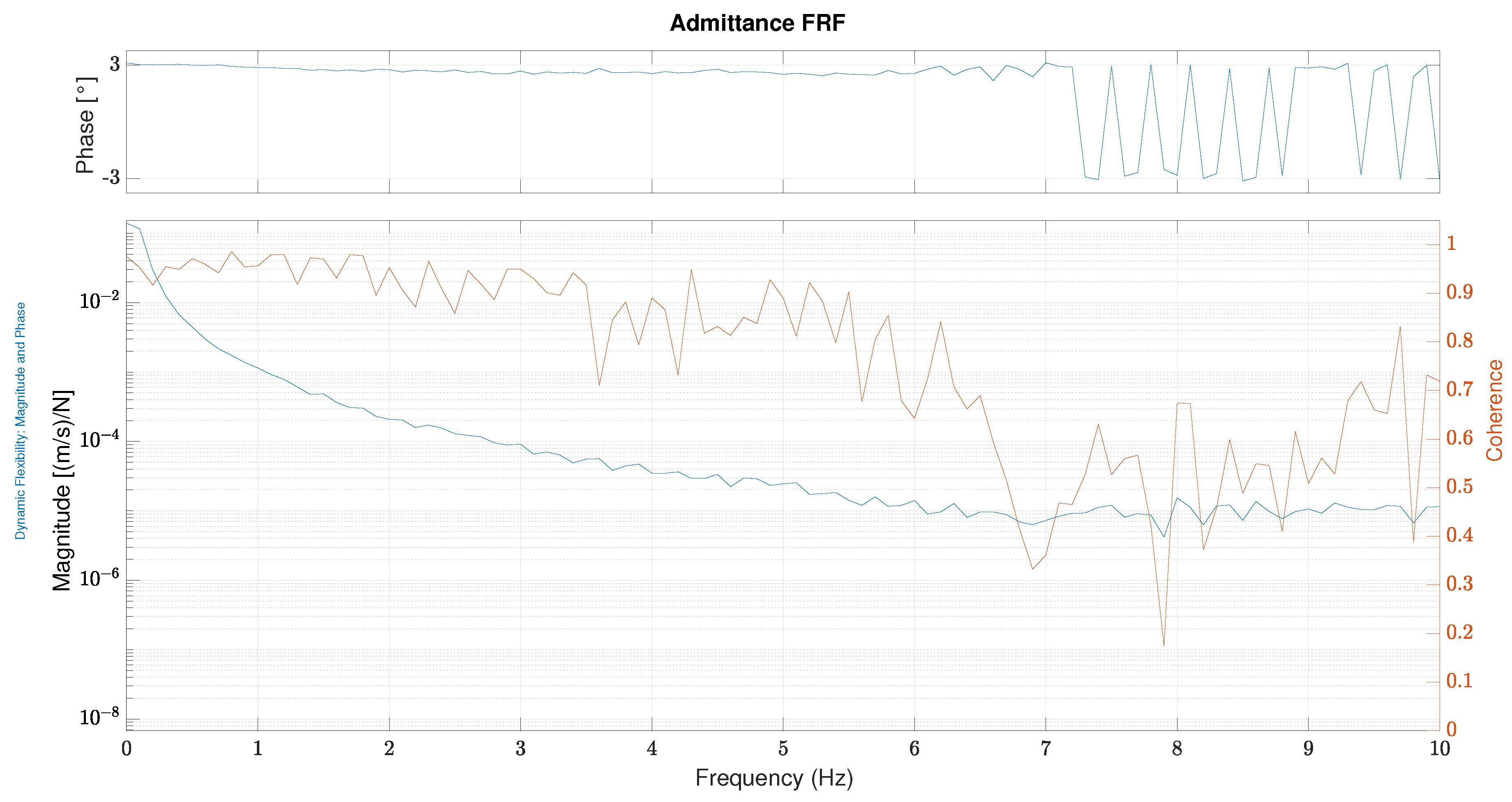
The performance of the velocity estimator was then analysed in terms of frequency response and the corresponding Bode diagram is reported in
Figure 12.
The
velocity_controller was then realized using a common PID loop and the speed estimator just introduced. Similarly, the
position_controller was implemented by encapsulating the
velocity_controller within an additional PID loop, as schematized in
Figure 13.
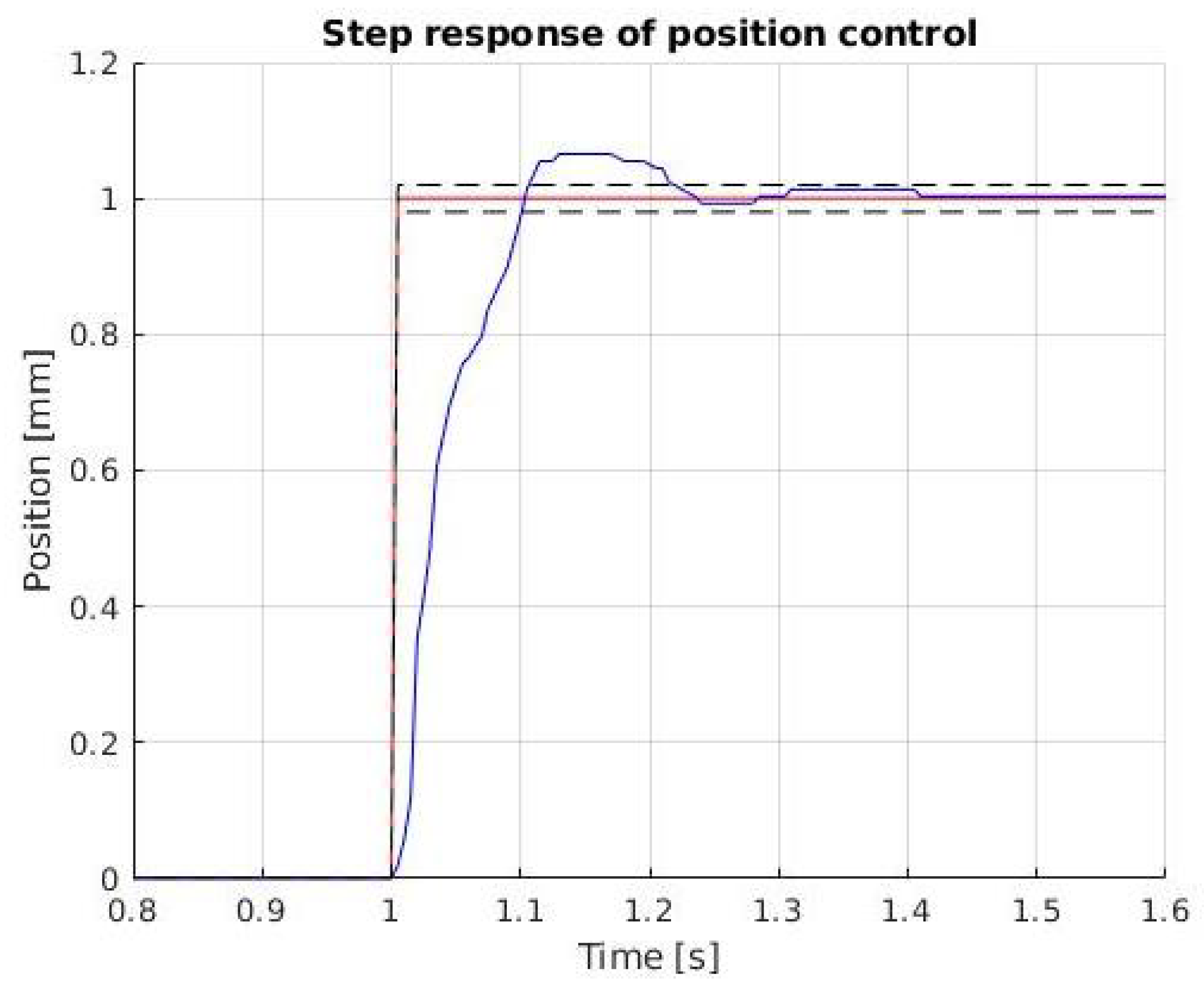
With reference to
Figure 14, the response of the
position_controller to a step input is characterized by a 5% overshoot, a settling time of 0.21 s and a steady state error lower than 0.5%, which is considered acceptable for the application of interest.
5.2. High-Level Control
Now, on top of the basic robot functionalities just presented, it is possible to implement the rehabilitation-specific controllers introduced at the beginning of this section.
5.2.1. Trajectory Controller
The
trajectory_controller can be used to perform passive rehabilitation exercises. Since it is a common tool, the authors decided to exploit the so-called
joint_trajectory_controller [
34], available as part of the
ros_control package. This controller takes as input trajectories specified as a set of waypoints to be reached at specific time instants and attempts to execute them as well as the mechanism allows. The interpolation between waypoints can be performed using linear, cubic or quintic 1D splines, depending on the level of continuity that has to be guaranteed. For this specific project, the authors chose to specify a desired position, velocity and acceleration for each waypoint and then used quintic splines interpolation to ensure continuity at the acceleration level. Thanks to the trajectory controller, PLANarm2 is capable of following any path that lays within the workspace of the robot with the performances achieved by the position controller, described in
Section 5.1.
5.2.2. Admittance Controller
Starting from Hogan’s work [
29], indirect force control strategies such as impedance and its dual admittance control can be considered the most proper and efficient way to control a robot interacting with its environment. As highlighted in [
30], impedance and admittance control are also the simplest and probably most used way to carry out an assistance-as-needed control in robotic neurorehabilitation. The possibility to change on-line their parameters, and therefore the robot’s behaviour, also allows to sophisticate the algorithm in several ways. As reported in
Section 4, in order to guarantee the device’s simplicity and affordability, it is not possible to realize a direct effort control. This seems to clash with the need to realize a haptic device and, for this reason, the authors choose a strategy similar to the one described in [
35]. Given a reference force
, coming from the digital environment connected to the device, it is possible to control the motors with a velocity reference (
) obtained through a PI control loop over the force error
, where
with
being the measured force. For the sake of simplicity, Equation (
29) has been written only for one of the controlled joints:
The proportional parameter in Equation (
29) is called
to highlight that the transparency felt by the user will increase while
, that can be associated to a virtual damping, decreases. A proper choice of these parameters must also take into account the disturbance rejection.
5.2.3. Tunnel Controller
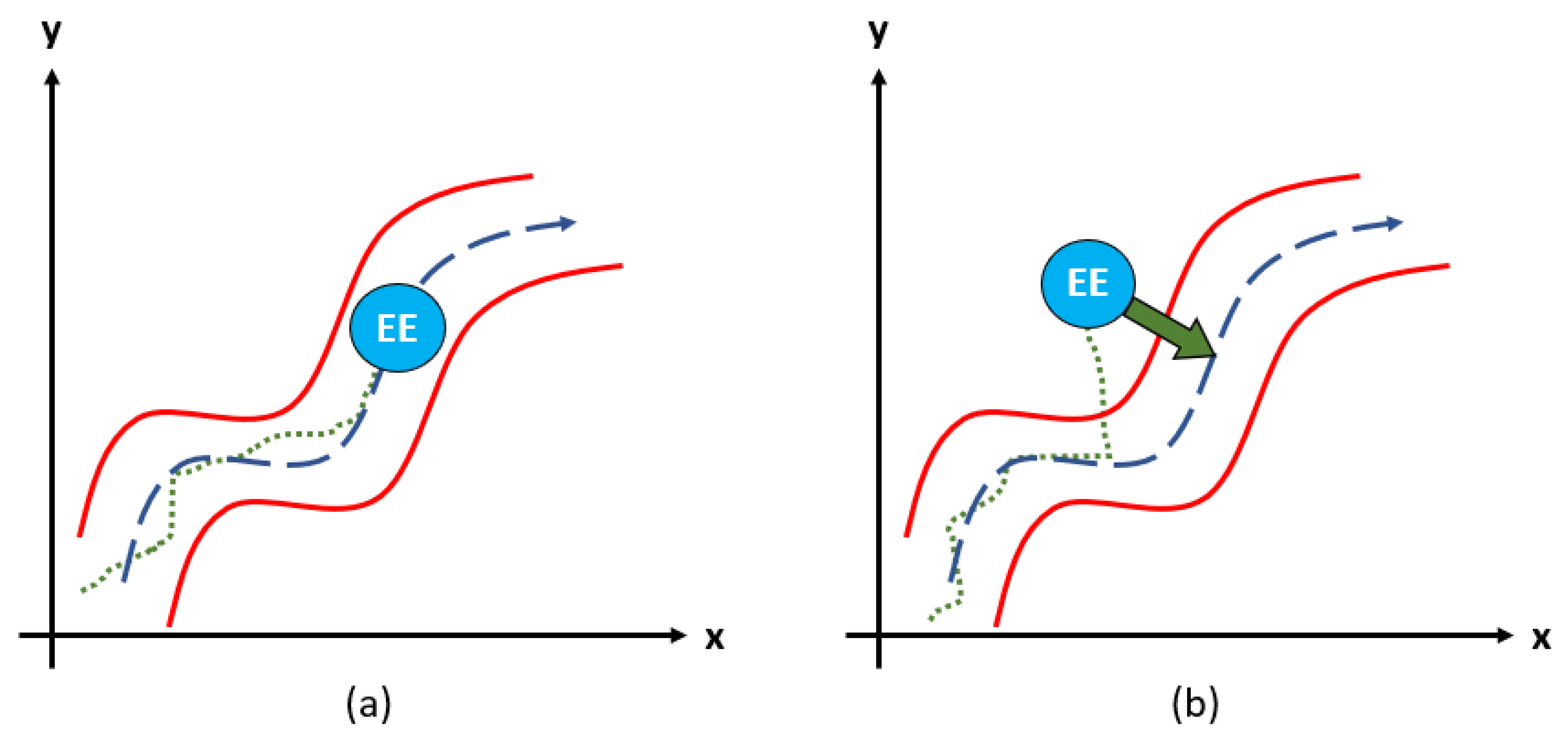
Corrective rehabilitation is proven effective when aiming to improve motion coordination. To provide this functionality, the authors decided to develop a so-called
tunnel_controller, similar to what is presented in [
36]. The controller takes as input a predefined trajectory and builds a virtual tunnel of user-defined width around it. The patient is allowed to move freely along the path and, whenever the tunnel’s boundaries are exceeded, a restoring force is produced in order to correct the undesired movement. A schematic representation of this concept is reported in
Figure 15.
Differently from the
trajectory_controller, for which input trajectories are time-parametrized, the
tunnel_controller requires paths expressed in terms of curvilinear abscissa
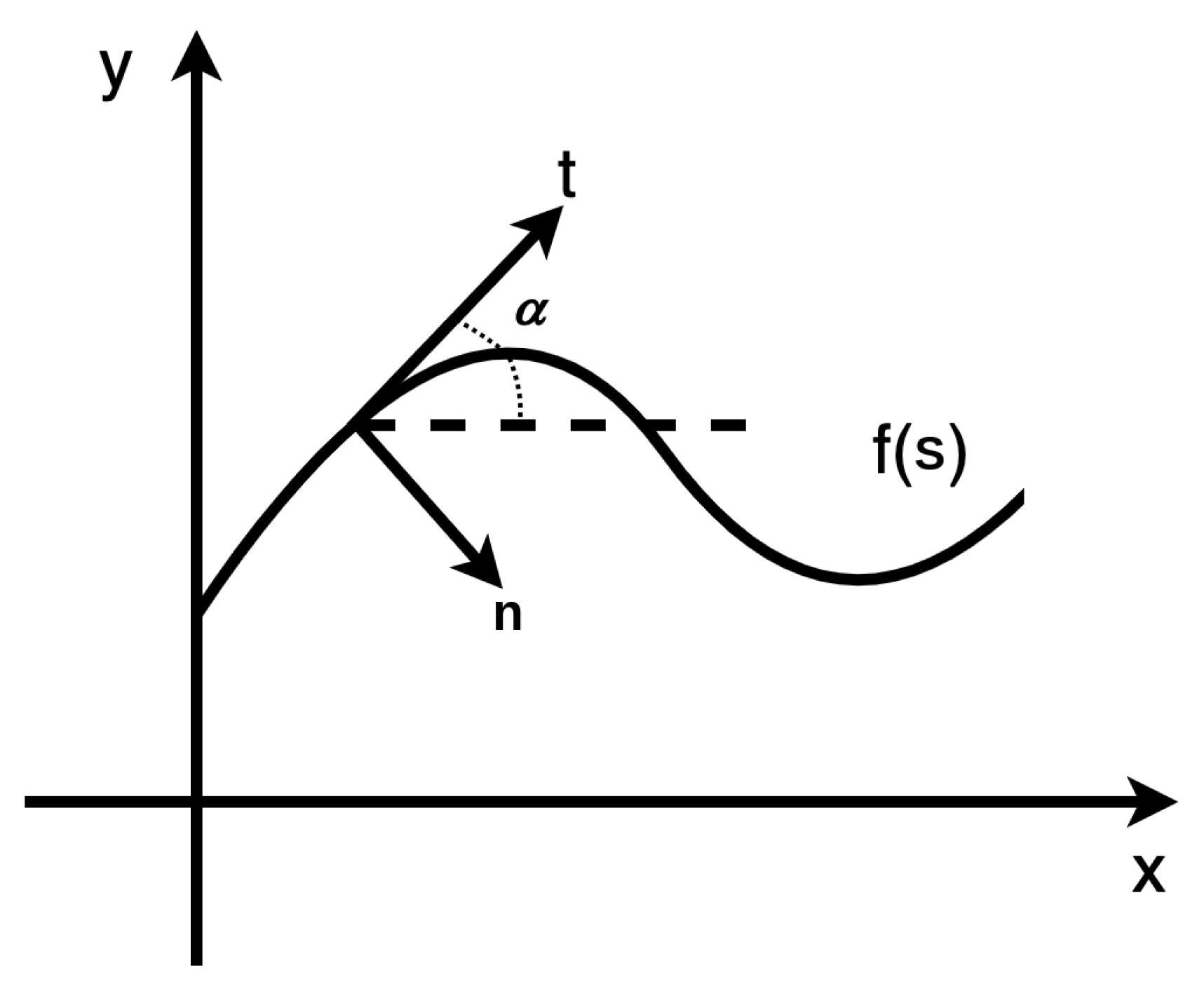
s. In order to guarantee coherence with the other controllers, a method that automatically transforms a time-parametrized trajectory into its corresponding s-version has been implemented so that the same computed trajectory can be applied to all the available controllers. In addition, a new coordinate system
has been defined on the trajectory
at any instant, denoting by
and
the tangential and the normal vectors, respectively, where
=
, as shown in
Figure 16.
The patient’s force on the end-effector is projected from the Cartesian reference frame to the new reference frame according to the instantaneous slope
of the requested trajectory. Then, the controller’s basic working principle is similar to the one of the
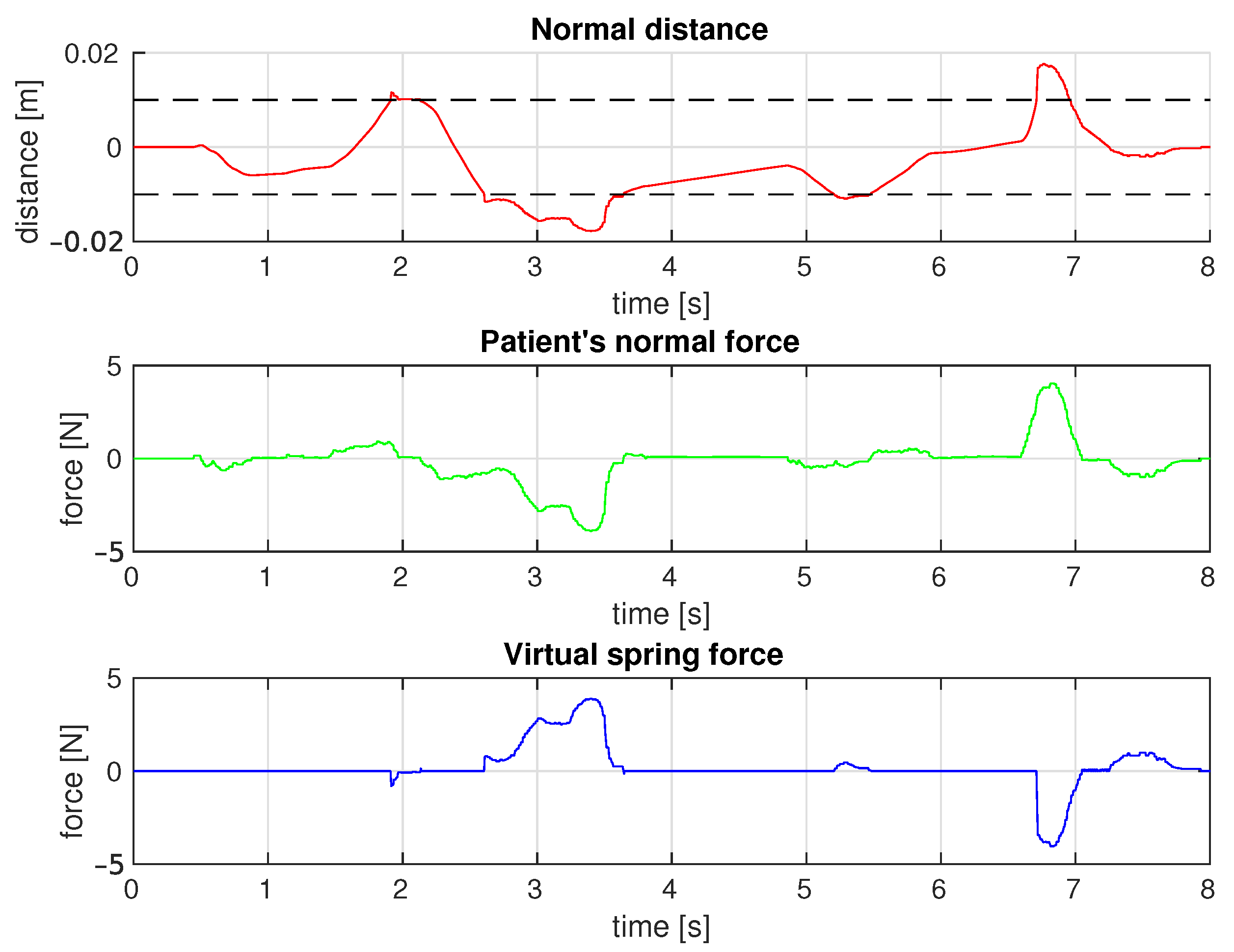
admittance_controller. For every control cycle, the normal distance
between desired and actual position of the end-effector, with respect to the given trajectory, is calculated. If that distance is smaller than the user-defined tunnel half-width W, tangential and normal measured forces are given as input to a high-level PI loop set with a reference of 0N. On the contrary, if the end-effector is detected outside said tunnel, the force
used as reference for the PI loop related to the normal direction is computed as in Equation (
30), where
represents the stiffness of the virtual spring responsible for the generation of the corrective force.
The effect of this approach is that the patient is allowed to move freely inside the virtual tunnel but, whenever the boundaries are exceeded, a virtual spring generates a corrective force that compensates the error and guides the end-effector back inside the tunnel. On top of this, an acceleration limit has been implemented within the controller’s logic for safety reasons: if any spasm or sudden movement of the patient occurs, it can be absorbed.
7. Conclusions
As a result of the increasing number of patients suffering disabilities due to stroke, many research groups have proposed devices aimed at facilitating the rehabilitation process. However, most of these devices are technically advanced and designed for clinical use. This paper presents the prototype of an affordable device for upper-limb neurorehabilitation based on a planar five-bar parallel kinematic mechanism.
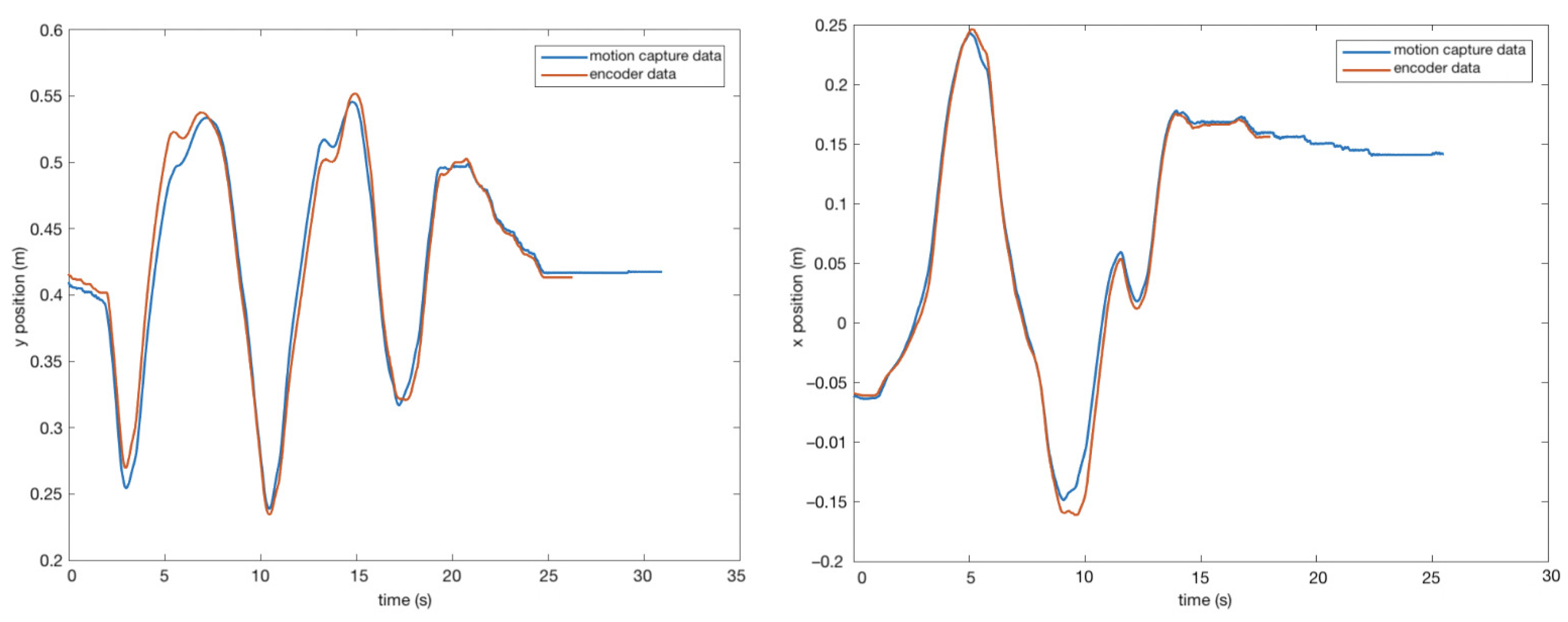
The optimal link lengths were obtained by optimizing the conditioning index and the minimum singular value of the Jacobian over the workspace. Components were chosen starting from kinematic and dynamic evaluations as well as on the desired performances. A 3D-printed prototype was presented and the main components and characteristic were analysed. Different kinds of controllers were implemented in order to verify the effectiveness of the prototype and the goodness of the design. Both active and passive controllers were tested and the measured performances showed a good dynamic behaviour. In order to validate the measurements of the end-effector position, a test procedure was followed. The position of the end-effector was recorded using motion capture cameras and compared to the measurements obtained from the encoders. It was shown that the measurements taken by the encoders are accurate enough for the target application.
Next steps will include more refined admittance and assist-as-needed control algorithms, starting from the obtained results and considering new improvements, in order to assist the patients in performing the required tasks according to their capabilities. Finally, a graphic user interface is being implemented in order provide a visual feedback to the patient while performing rehabilitation tasks.

 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




















