

Fabrication of Origami Soft Gripper Using On-Fabric 3D Printing
 , ,
, ,
Abstract
:1. Introduction
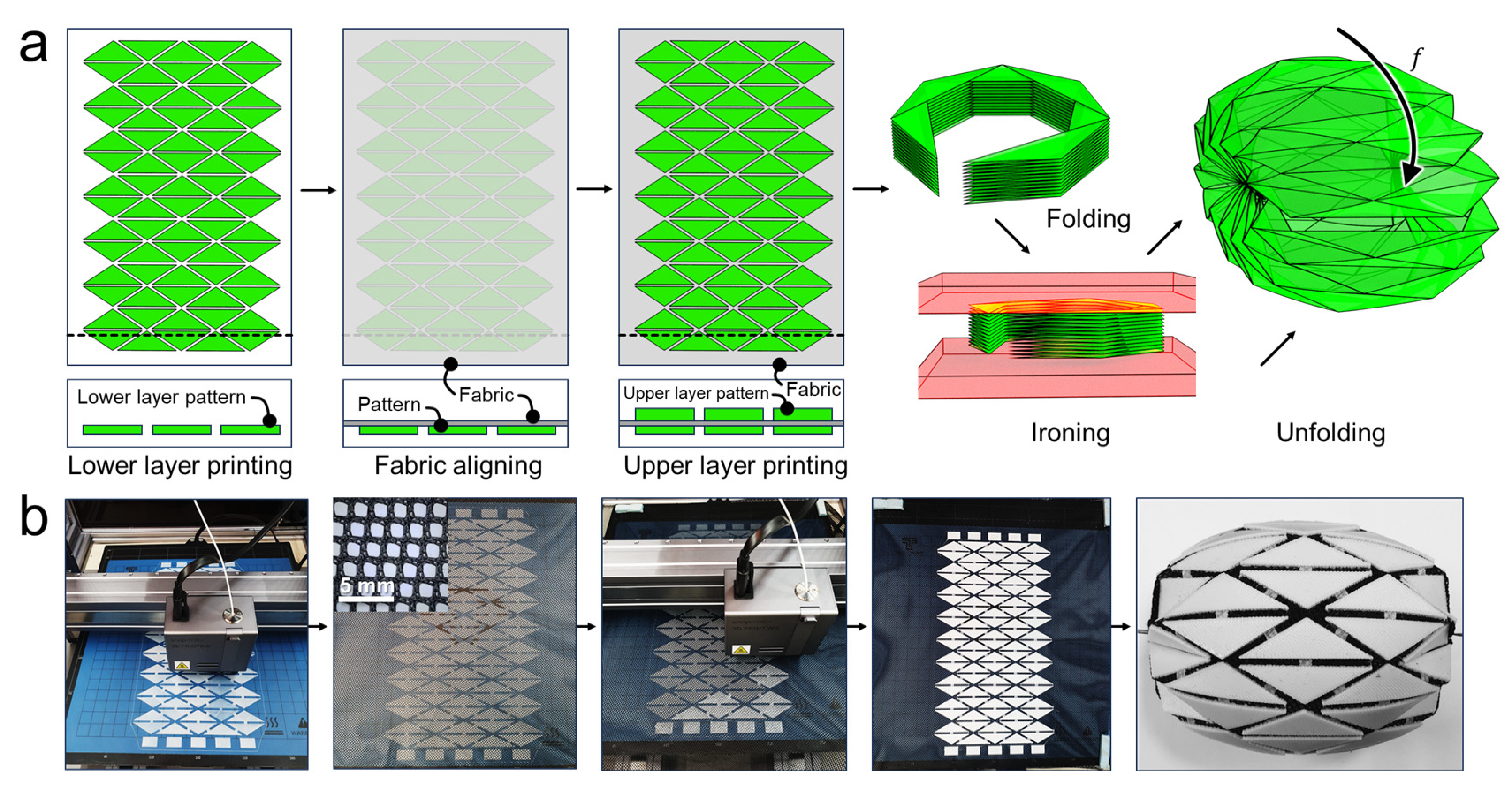
2. Materials and Methods
3. Results and Discussion
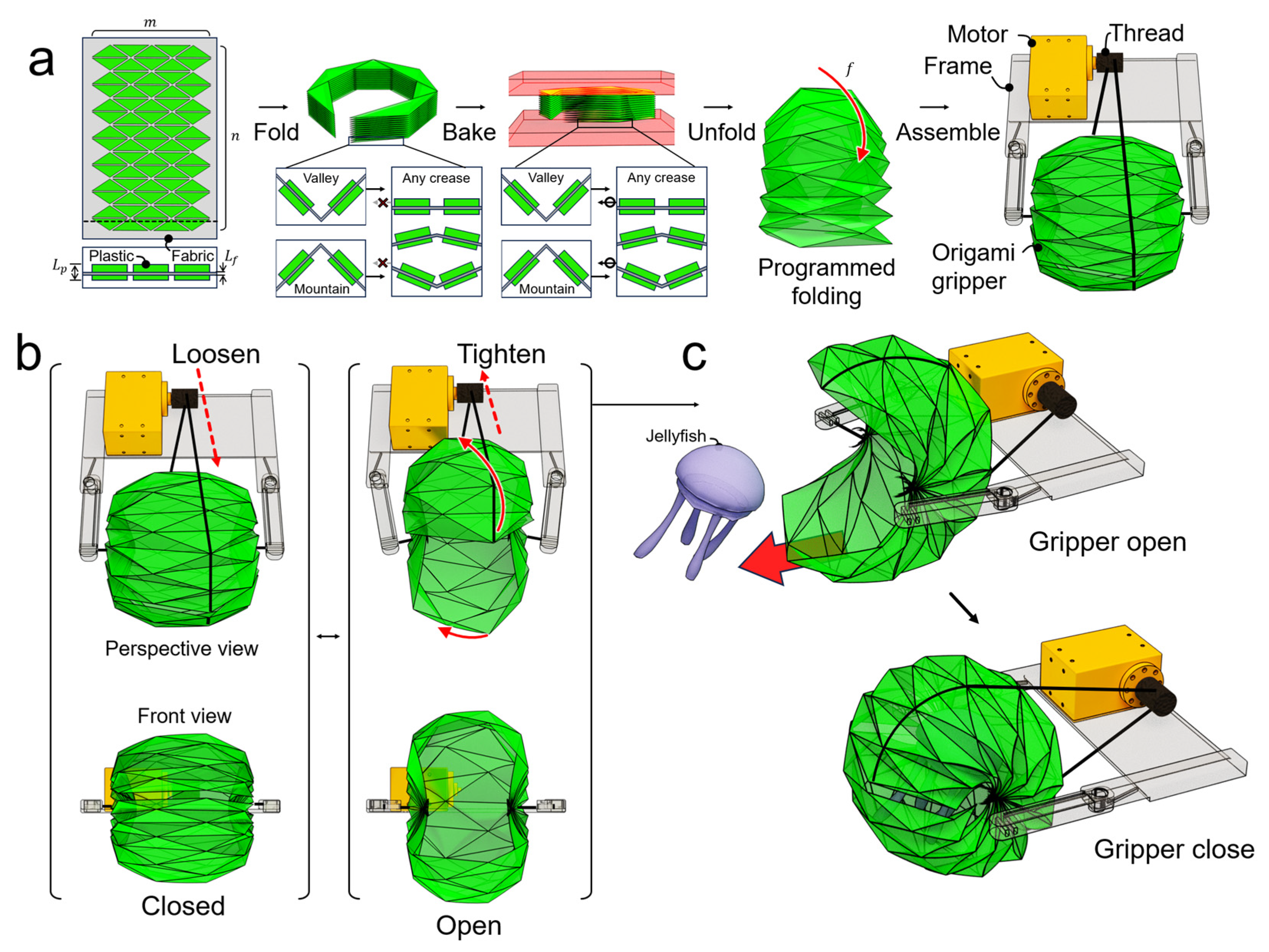
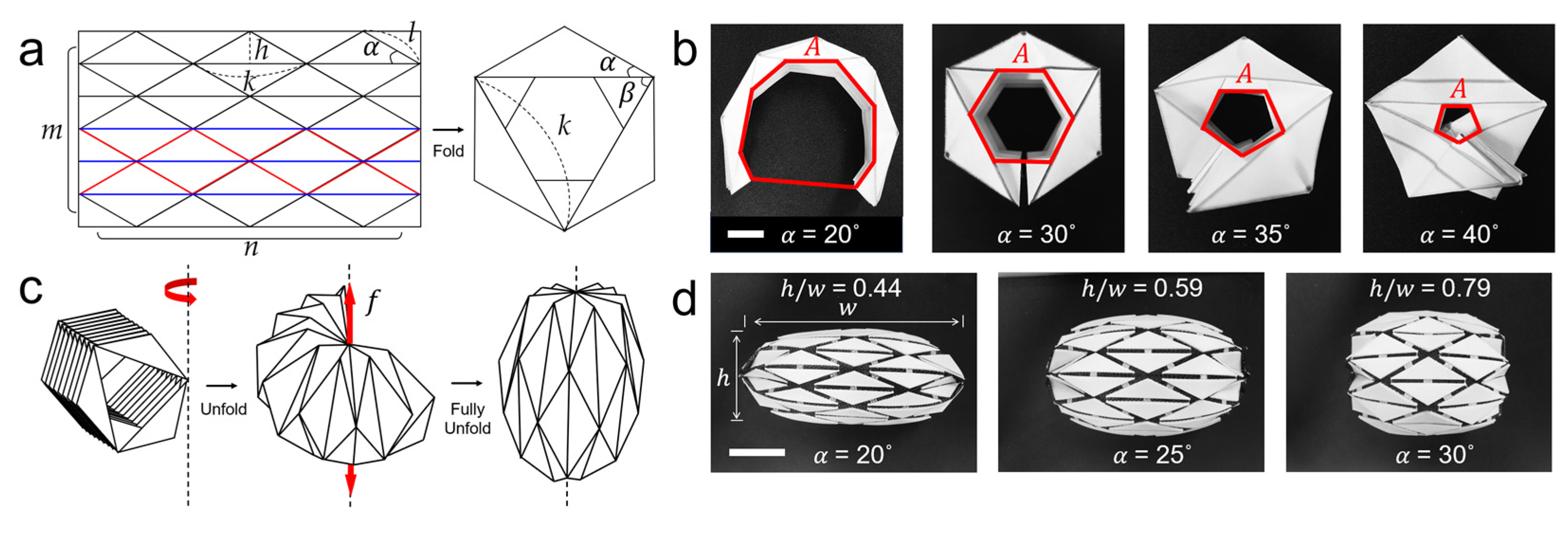
3.1. Origami Pattern Design
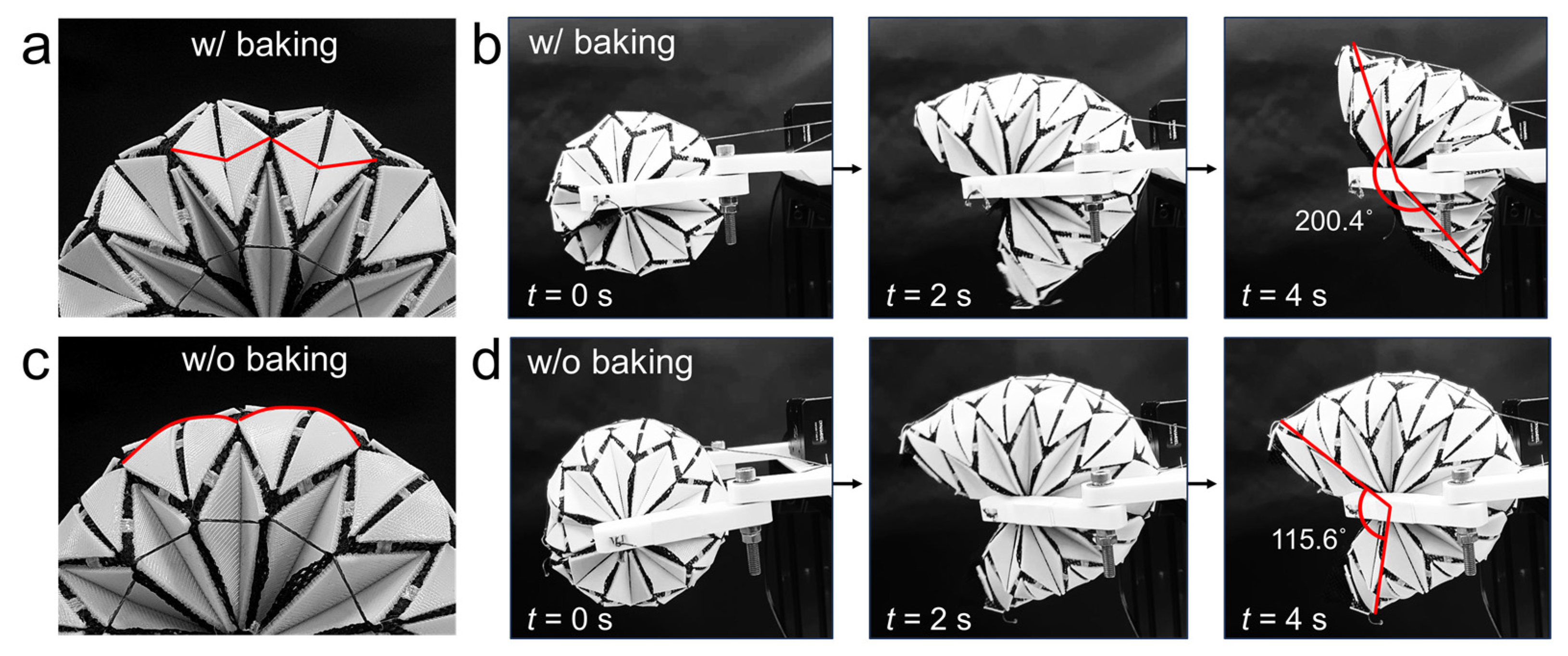
3.2. Programmed Folding by Heat Treatment
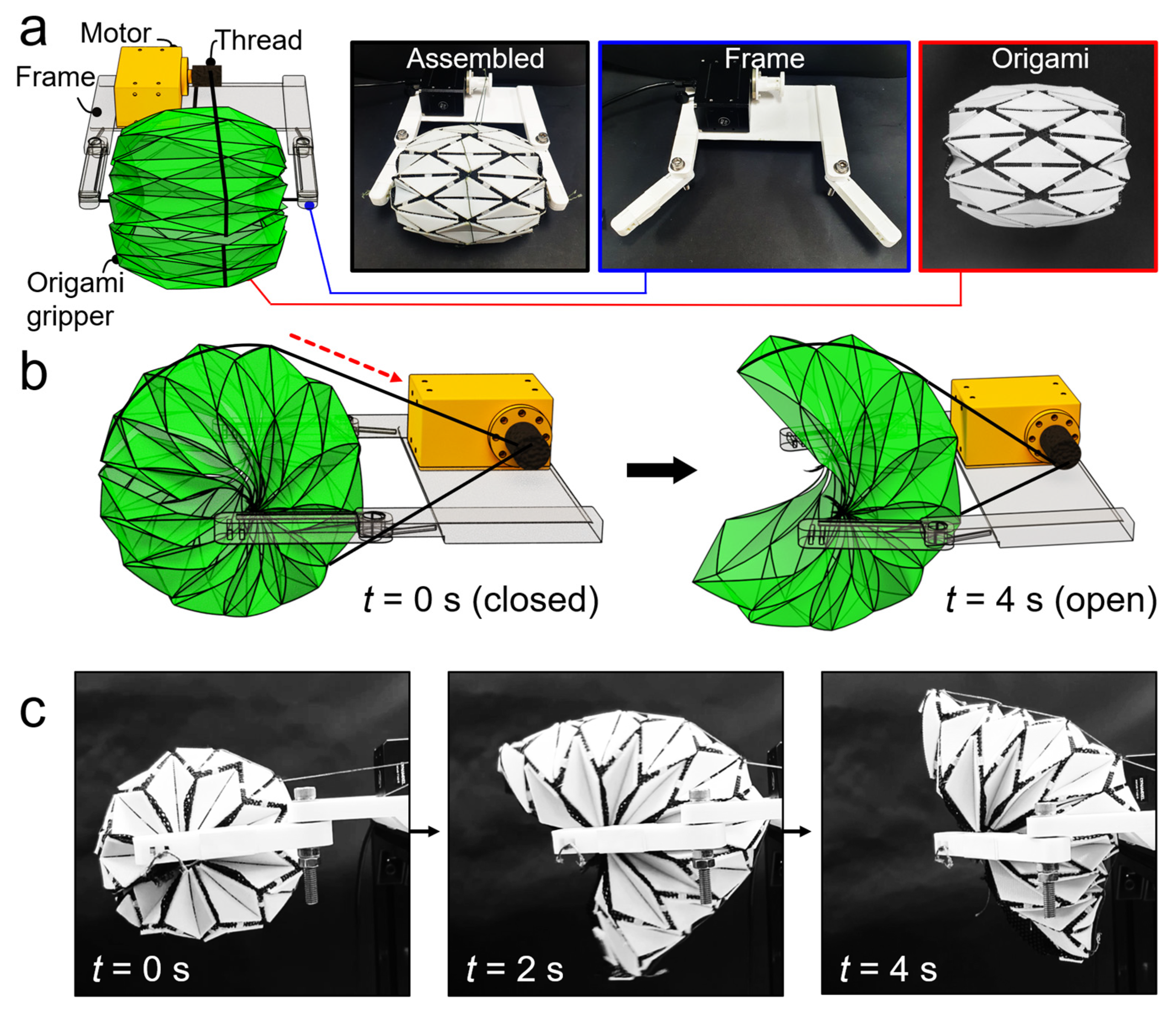
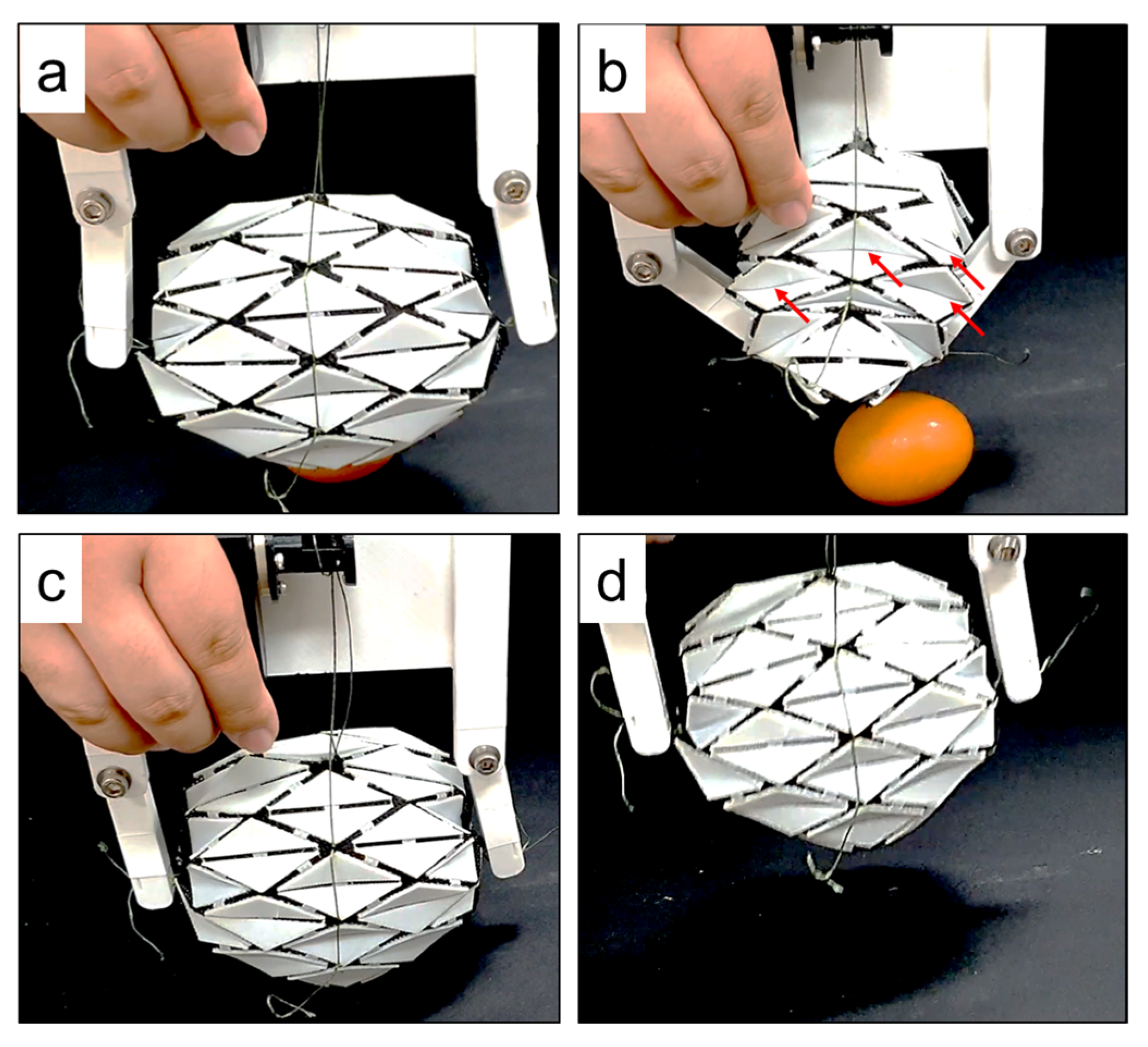
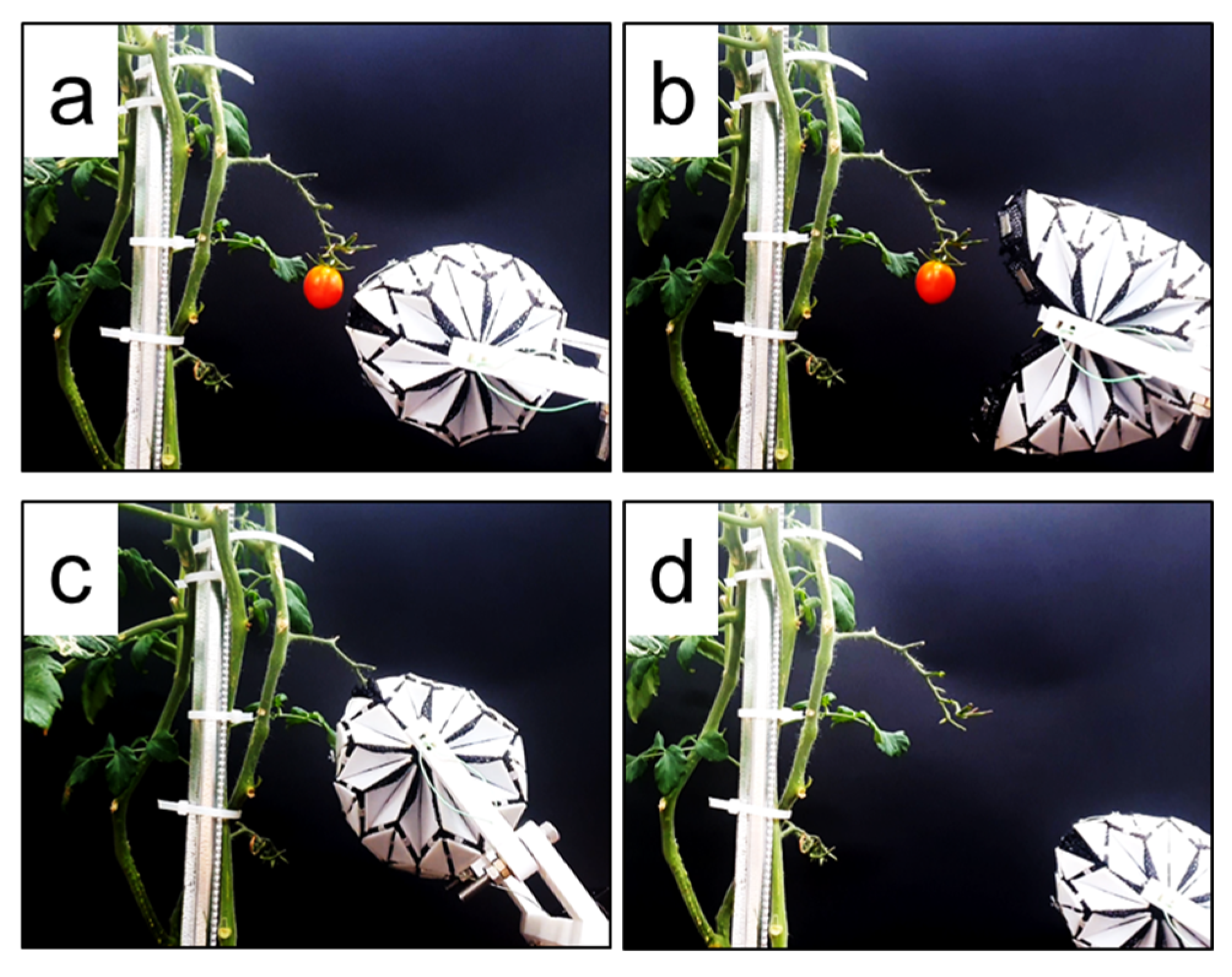
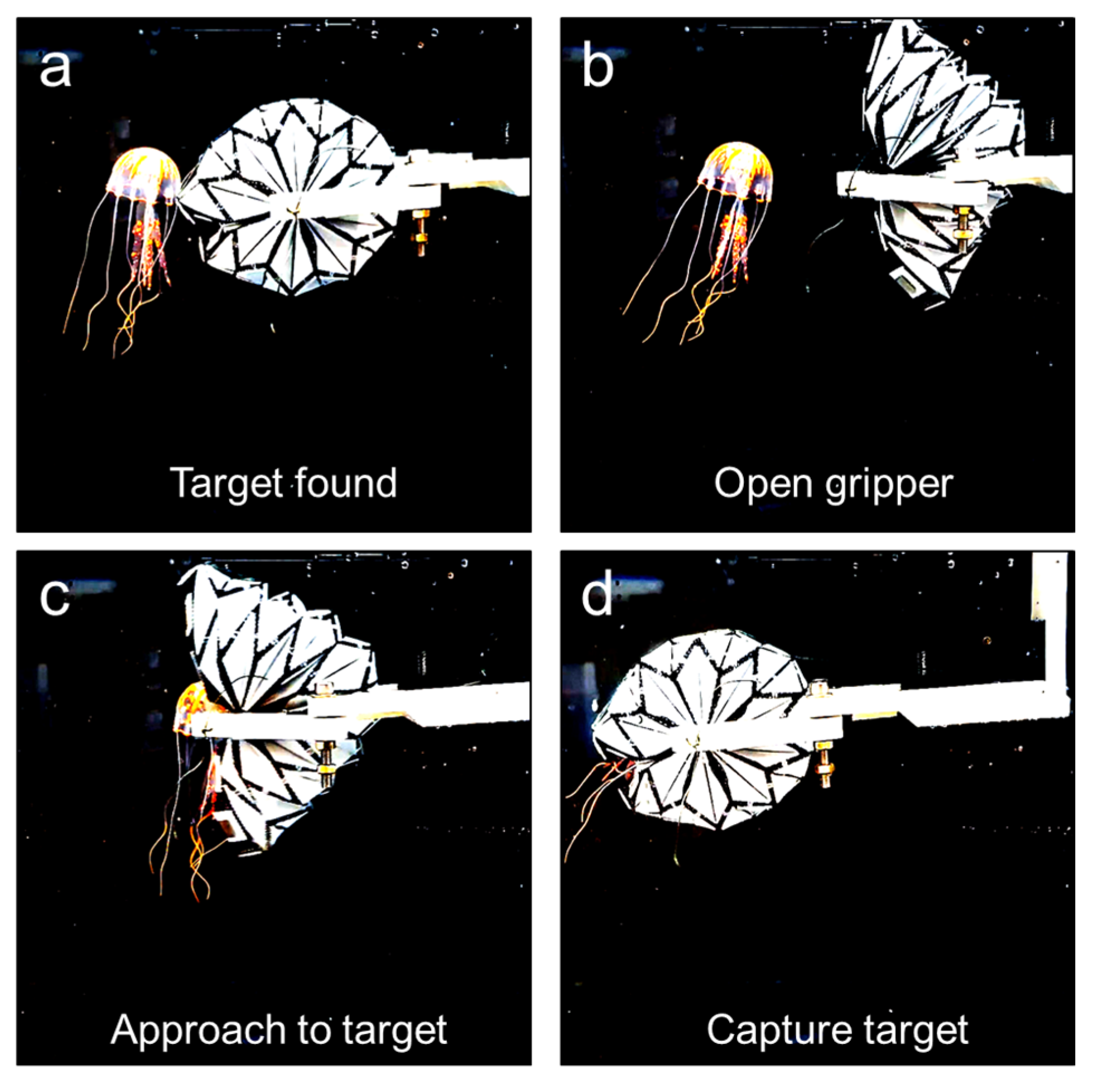
3.3. Origami-Based Soft Encapsulating Gripper Applications
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Grau, A.; Indri, M.; Bello, L.L.; Sauter, T. Robots in Industry: The Past, Present, and Future of a Growing Collaboration with Humans. IEEE Ind. Electron. Mag. 2020, 15, 50–61. [Google Scholar] [CrossRef]
- Sherwani, F.; Asad, M.M.; Ibrahim, B.S.K.K. Collaborative Robots and Industrial Revolution 4.0 (IR 4.0). In Proceedings of the 2020 International Conference on Emerging Trends in Smart Technologies (ICETST), Karachi, Pakistan, 26–27 March 2020. [Google Scholar] [CrossRef]
- Bae, J.H.; Park, S.W.; Park, J.H.; Baeg, M.; Kim, H.D.; Oh, S.R. Development of a low cost anthropomorphic robot hand with high capability. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura-Algarve, Portugal, 7–12 October 2012; pp. 4776–4782. [Google Scholar] [CrossRef]
- Li, P.; Liu, X. Common Sensors in Industrial Robots: A Review. J. Phys. Conf. Ser. 2019, 1267, 012036. [Google Scholar] [CrossRef]
- Majidi, C. Soft Robotics: A Perspective—Current Trends and Prospects for the Future. Soft Robot. 2014, 1, 5–11. [Google Scholar] [CrossRef]
- Kim, S.; Laschi, C.; Trimmer, B. Soft robotics: A bioinspired evolution in robotics. Trends Biotechnol. 2013, 31, 287–294. [Google Scholar] [CrossRef] [PubMed]
- Laschi, C.; Mazzolai, B.; Cianchetti, M. Soft robotics: Technologies and systems pushing the boundaries of robot abilities. Sci. Robot. 2016, 1, eaah3690. [Google Scholar] [CrossRef]
- Whitesides, G.M. Soft Robotics. Angew. Chem. Int. Ed. 2018, 57, 4258–4273. [Google Scholar] [CrossRef]
- Mao, Z.; Nagaoka, T.; Yokota, S.; Kim, J.-W. Soft fiber-reinforced bending finger with three chambers actuated by ECF (electro-conjugate fluid) pumps. Sens. Actuator. A Phys. 2020, 310, 112034. [Google Scholar] [CrossRef]
- Peng, Y.; Sakai, Y.; Nakagawa, K.; Funabora, Y.; Aoyama, T.; Yokoe, K.; Doki, S. Funabot-Suit: A bio-inspired and McKibben muscle-actuated suit for natural kinesthetic perception. Biomim. Intell. Robot. 2023, 3, 134036. [Google Scholar] [CrossRef]
- Lee, J.-H.; Chung, Y.S.; Rodrigue, H. Long Shape Memory Alloy Tendon-based Soft Robotic Actuators and Implementation as a Soft Gripper. Sci. Rep. 2019, 9, 11251. [Google Scholar] [CrossRef] [PubMed]
- Hong, Y.; Zhao, Y.; Berman, J.; Chi, Y.; Li, Y.; Huang, H.; Yin, J. Angle-programmed tendril-like trajectories enable a multifunctional gripper with ultradelicacy, ultrastrength, and ultraprecision. Nat. Commun. 2023, 14, 4625. [Google Scholar] [CrossRef] [PubMed]
- Yang, Y.; Vella, K.; Holmes, D.P. Grasping with Kirigami Shells. Sci. Robot. 2021, 6, 1–9. [Google Scholar] [CrossRef] [PubMed]
- Shintake, J.; Cacucciolo, V.; Floreano, D.; Shea, H. Soft Robotic Grippers. Adv. Mater. 2018, 30, e1707035. [Google Scholar] [CrossRef] [PubMed]
- Li, S.; Stampfli, J.J.; Xu, H.J.; Malkin, E.; Diaz, E.V.; Rus, D.; Wood, R.J. A Vacuum-driven Origami “Magic-ball” Soft Gripper. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–9. [Google Scholar] [CrossRef]
- Samadikhoshkho, Z.; Zareinia, K.; Janabi-Sharifi, F. A Brief Review on Robotic Grippers Classifications. In Proceedings of the 2019 IEEE Canadian Conference of Electrical and Computer Engineering (CCECE), Edmonton, AB, Canada, 5–8 May 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Sanchez, V.; Mahadevan, K.; Ohlson, G.; Graule, M.A.; Yuen, M.C.; Teeple, C.B.; Weaver, J.C.; McCann, J.; Bertoldi, K.; Wood, R.J. 3D Knitting for Pneumatic Soft Robotics. Adv. Funct. Mater. 2023, 33, 2212541. [Google Scholar] [CrossRef]
- Kim, Y.; Cha, Y. Soft Pneumatic Gripper With a Tendon-Driven Soft Origami Pump. Front. Bioeng. Biotechnol. 2020, 8, 461. [Google Scholar] [CrossRef] [PubMed]
- Wu, Y.; Zeng, G.; Xu, J.; Zhou, J.; Chen, X.; Wang, Z.; Chen, Z.; Xu, Z.; Zheng, J.; Wu, D. A bioinspired multi-knuckle dexterous pneumatic soft finger. Sens. Actuator. A Phys. 2023, 350, 114105. [Google Scholar] [CrossRef]
- Rodrigue, H.; Wang, W.; Han, M.-W.; Kim, T.J.; Ahn, S.-H.; Robertson, M.A.; Sadeghi, H.; Florez, J.M.; Paik, J.; Kim, H.-S.; et al. An Overview of Shape Memory Alloy-Coupled Actuators and Robots. Soft Robot. 2017, 4, 3–15. [Google Scholar] [CrossRef] [PubMed]
- Liu, M.; Hao, L.; Zhang, W.; Zhao, Z. A novel design of shape-memory alloy-based soft robotic gripper with variable stiffness. Int. J. Adv. Robot. Syst. 2020, 17, 1–12. [Google Scholar] [CrossRef]
- Xu, L.; Gu, G. Bioinspired Venus flytrap: A dielectric elastomer actuated soft gripper. In Proceedings of the 2017 24th International Conference on Mechatronics and Machine Vision in Practice (M2VIP), Auckland, New Zealand, 21–23 November 2017; pp. 1–3. [Google Scholar] [CrossRef]
- Shintake, J.; Schubert, B.; Rosset, S.; Shea, H.; Floreano, D. Variable stiffness actuator for soft robotics using dielectric elastomer and low-melting-point alloy. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 1097–1102. [Google Scholar] [CrossRef]
- Shintake, J.; Rosset, S.; Schubert, B.; Floreano, D.; Shea, H. Versatile Soft Grippers with Intrinsic Electroadhesion Based on Multifunctional Polymer Actuators. Adv. Mater. 2016, 28, 231–238. [Google Scholar] [CrossRef] [PubMed]
- Teoh, Z.E.; Phillips, B.T.; Becker, K.P.; Whittredge, G.; Weaver, J.C.; Hoberman, C.; Gruber, D.F.; Wood, R.J. Rotary-actuated folding polyhedrons for midwater investigation of delicate marine organisms. Sci. Robot. 2018, 3, 1–9. [Google Scholar] [CrossRef] [PubMed]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristics | Conventional Robotic Gripper | Existing Soft Gripper | Our Origami-Based Soft Gripper |
|---|---|---|---|
| Materials | Rigid materials (e.g., metal, plastic) | Soft and flexible materials (e.g., silicone, rubber) | Soft and flexible materials (TPU and fabric) |
| Weight | Heavy | Light | Light |
| Complexity of operation | Complex | Complex | Simple |
| Delicate grasping | Complex | Manageable but still challenging to deal with more fragile object | Manageable |
| Contacting with objects | Contact | Contact | Noncontact |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Choi, H.; Park, T.; Hwang, G.; Ko, Y.; Lee, D.; Lee, T.; Park, J.-O.; Bang, D. Fabrication of Origami Soft Gripper Using On-Fabric 3D Printing. Robotics 2023, 12, 150. https://doi.org/10.3390/robotics12060150
Choi H, Park T, Hwang G, Ko Y, Lee D, Lee T, Park J-O, Bang D. Fabrication of Origami Soft Gripper Using On-Fabric 3D Printing. Robotics. 2023; 12(6):150. https://doi.org/10.3390/robotics12060150
Chicago/Turabian StyleChoi, Hana, Tongil Park, Gyomin Hwang, Youngji Ko, Dohun Lee, Taeksu Lee, Jong-Oh Park, and Doyeon Bang. 2023. "Fabrication of Origami Soft Gripper Using On-Fabric 3D Printing" Robotics 12, no. 6: 150. https://doi.org/10.3390/robotics12060150