
Adaptive Backstepping Integral Sliding Mode Control of a MIMO Separately Excited DC Motor

Abstract
:1. Introduction
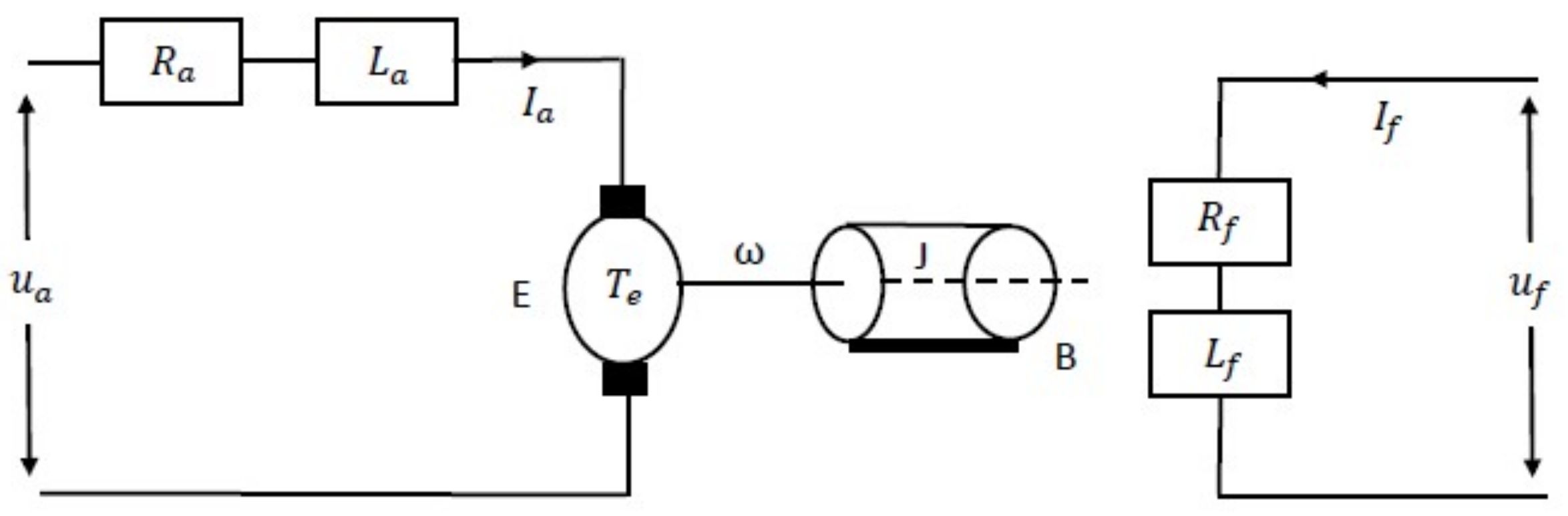
2. Mathematical Model of a SEDCM
3. Nonlinear Controllers Design
3.1. Feedback Linearization (FBL) Based Control
3.2. Design of Sliding Mode Controller
3.3. Nonlinear Adaptive Backstepping Controller
Adaptive Backstepping Controller Design
3.4. Adaptive Backstepping Integral Sliding Mode Controller Design
Design of the Discontinuous Component ‘u1’
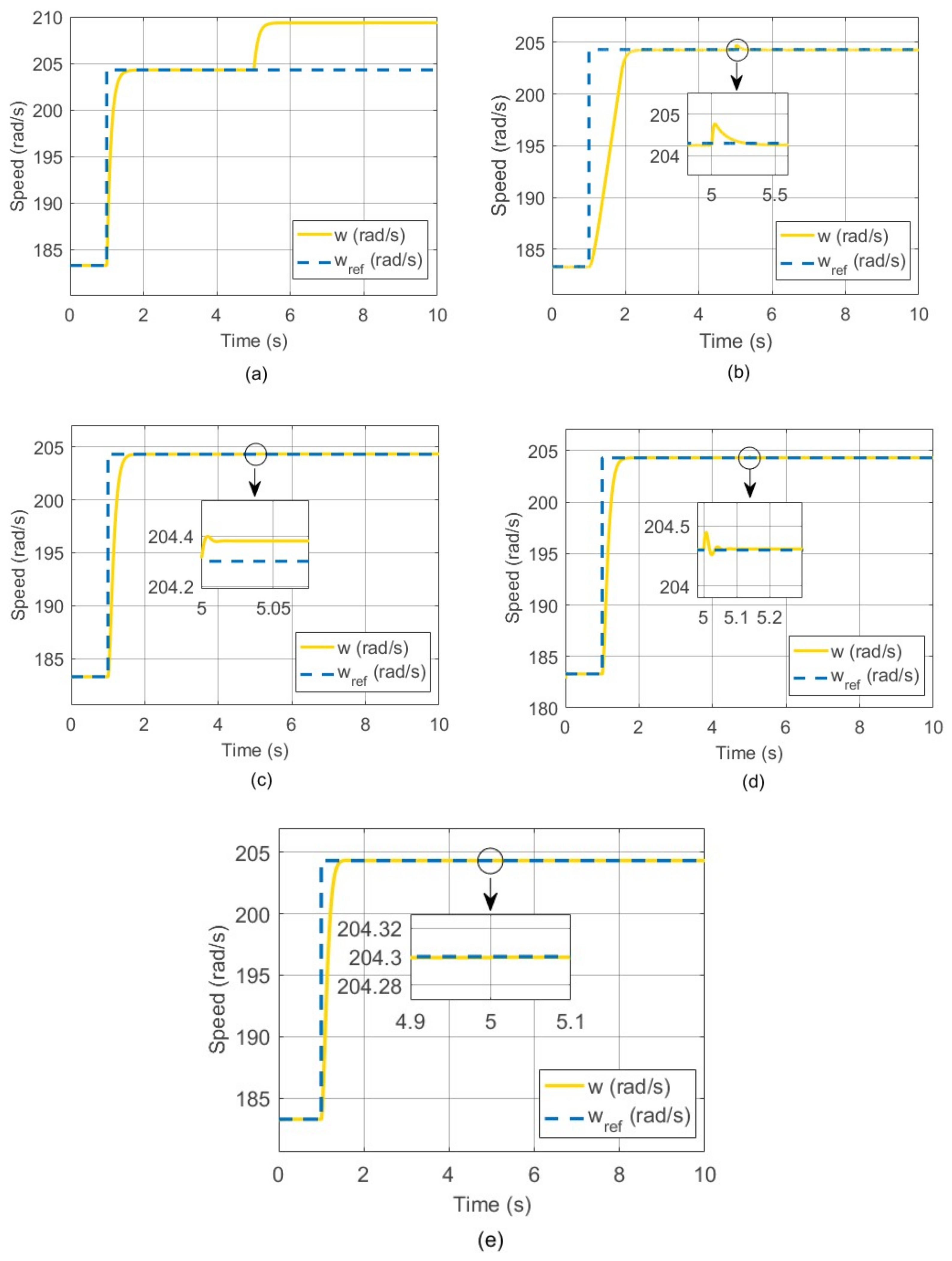
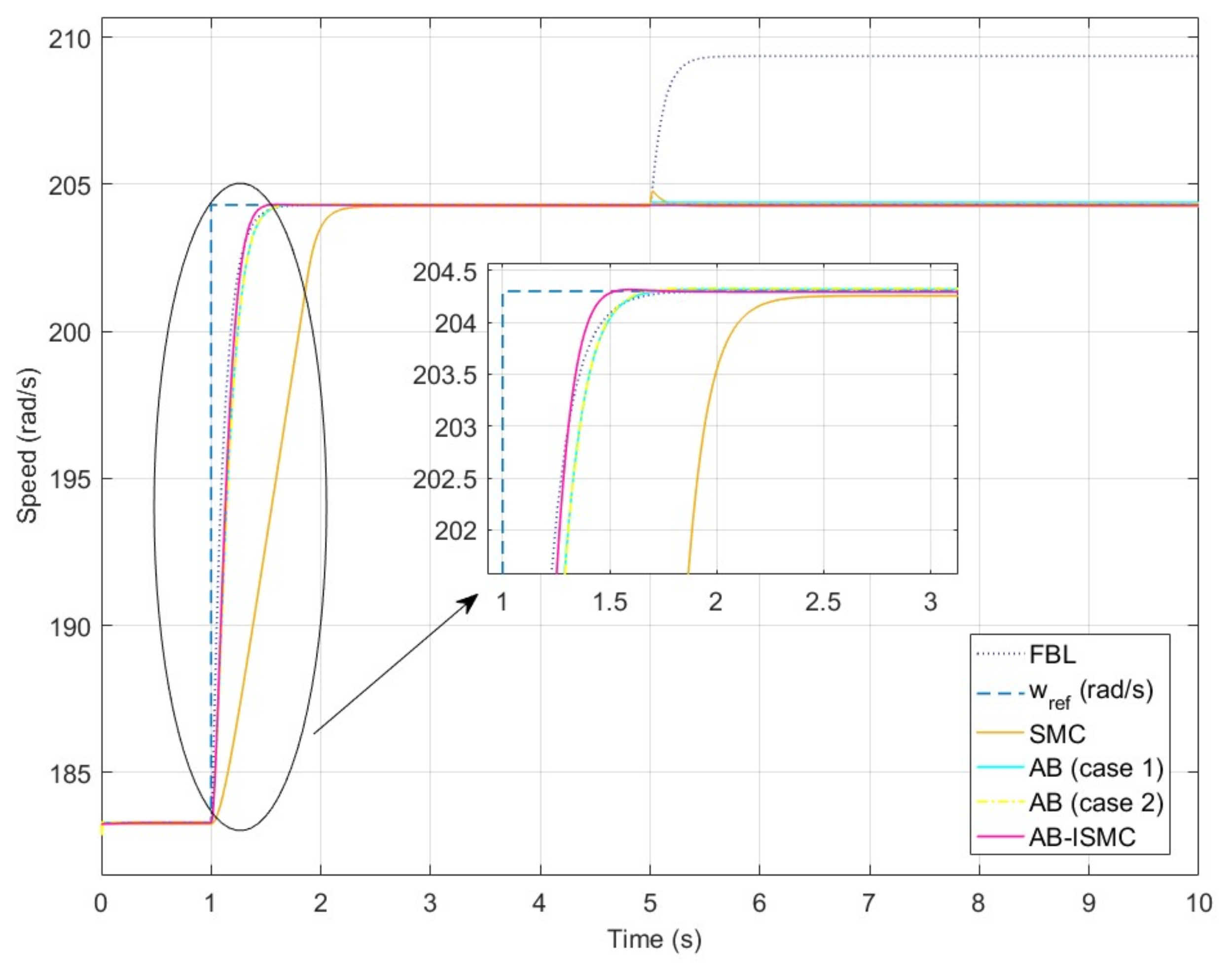
4. Simulation Results
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| AB | adaptive backstepping |
| ABC | artificial bee colony |
| AB–ISMC | adaptive backstepping integral sliding mode controller |
| BSC | backstepping controller |
| FBL | feedback linearization |
| FLC | fuzzy logic controller |
| FOSMC | fractional-order SMC |
| IAE | integral absolute error |
| IM | induction motor |
| IOFL | input–output feedback linearization |
| ISE | integral square error |
| ISMC | integral sliding mode control |
| ITAE | integral time absolute error |
| MIMO | multi-input-and-multi-output |
| PD | proportional–derivative |
| PI | proportional–integral |
| PID | proportional–integral–derivative |
| PMSMs | permanent magnet synchronous motors |
| SEDCM | separately excited DC motor |
References
- Riaz, S.; Qi, R.; Tutsoy, O.; Iqbal, J. A novel adaptive PD-type iterative learning control of the PMSM servo system. PLoS ONE 2023, 18, e0279253. [Google Scholar] [CrossRef] [PubMed]
- Saleem, O.; Ali, S.; Iqbal, J. Robust MPPT control of stand-alone photovoltaic systems via adaptive fractional-order PID controller with self-adjusting fractional orders. Energies 2023, 16, 5039. [Google Scholar] [CrossRef]
- Harrouz, A.; Becheri, H.; Colak, I.; Kayisli, K. Backstepping control of a separately excited DC motor. Electr. Eng. 2018, 100, 1393–1403. [Google Scholar] [CrossRef]
- Singh, N.; Sharma, A.K.; Tiwari, M.; Jasiński, M.; Leonowicz, Z.; Rusek, S.; Gono, R. Robust Control of SEDCM by Fuzzy-PSO. Electronics 2023, 12, 335. [Google Scholar] [CrossRef]
- Balding, S.; Gning, A.; Cheng, Y.; Iqbal, J. Information rich voxel grid for use in heterogeneous multi-agent robotics. Appl. Sci. 2023, 13, 5065. [Google Scholar] [CrossRef]
- Tajudin, A.I.; Izani, M.A.D.; Samat, A.A.A.; Omar, S.; Idin, M.A.M. Design a speed control for DC motor using an optimal PID controller implementation of ABC algorithm. In Proceedings of the IEEE 12th International Conference on Control System, Computing and Engineering (ICCSCE), Penang, Malaysia, 21–22 October 2022; pp. 97–102. [Google Scholar]
- Ahmed, A.; Javed, S.B.; Uppal, A.A.; Iqbal, J. The Development of CAVLAB—A control-oriented MATLAB based simulator for an underground coal gasification process. Mathematics 2023, 11, 2493. [Google Scholar] [CrossRef]
- Gangwar, A.D.; Sharma, A.; Singh, T.V.P.; Gao, S. Fuzzy logic and PI based closed-loop speed control of a separately excited DC motor using DC-DC converter. In Proceedings of the 2022 2nd Asian Conference on Innovation in Technology (ASIANCON), Ravet, India, 26–28 August 2022; pp. 1–6. [Google Scholar]
- Koondhar, M.; Channa, I.; Bukhari, S.; Jamali, M. PI and fuzzy logic controller based comparative analysis of separately excited DC motor. J. Appl. Emerg. Sci. 2021, 11, 52. [Google Scholar]
- Soumana, R.A.; Saulo, M.J.; Muriithi, C.M. Enhanced speed control of separately excited DC motor using fuzzy-neural networks controller. In Proceedings of the 2022 4th International Conference on Smart Systems and Inventive Technology (ICSSIT), Tirunelveli, India, 20–22 January 2022; pp. 729–736. [Google Scholar]
- Sagar, J.D. DC Motor Control using PID Controller. Int. Res. J. Eng. Technol. 2020, 7, 1765–1769. [Google Scholar]
- Wati, T.; Subiyanto; Sutarno. Simulation model of speed control DC motor using fractional order PID controller. J. Phys. Conf. Ser. 2020, 1444, 012022. [Google Scholar] [CrossRef]
- Saleem, O.; Abbas, F.; Iqbal, J. Complex fractional-order LQIR for inverted-pendulum-type robotic mechanisms - Design and experimental validation. Mathematics 2023, 11, 913. [Google Scholar] [CrossRef]
- Vesović, M.; Jovanović, R.; Trišović, N. Control of a DC motor using feedback linearization and gray wolf optimization algorithm. Adv. Mech. Eng. 2022, 14, 16878132221085324. [Google Scholar] [CrossRef]
- Labbadi, M.; Iqbal, J.; Djemai, M.; Boukal, Y.; Bouteraa, Y. Robust tracking control for a quadrotor subjected to disturbances using new hyperplane-based fast terminal sliding mode. PLoS ONE 2023, 18, e0283195. [Google Scholar] [CrossRef] [PubMed]
- Ahmad, S.; Uppal, A.A.; Azam, M.R.; Iqbal, J. Chattering free sliding mode control and state dependent kalman filter design for underground coal gasification energy conversion process. Electronics 2023, 12, 876. [Google Scholar] [CrossRef]
- Sarker, S.K.; Das, S.K. High performance nonlinear controller design for AC and DC machines: Partial feedback linearization approach. Int. J. Dyn. Control 2018, 6, 679–693. [Google Scholar] [CrossRef]
- Gou, L.; Wang, C.; Zhou, M.; You, X. Integral sliding mode control for starting speed sensorless controlled induction motor in the rotating condition. IEEE Trans. Power Electron. 2020, 35, 4105–4116. [Google Scholar] [CrossRef]
- Zaihidee, M.F.; Mekhilef, S.; Mubin, M. Robust speed control of PMSM using sliding mode control (SMC)—A review. Energies 2019, 12, 1669. [Google Scholar] [CrossRef] [Green Version]
- Ali, S.; Prado, A.; Pervaiz, M. Hybrid backstepping-super twisting algorithm for robust speed control of a three-phase induction motor. Electronics 2023, 12, 681. [Google Scholar] [CrossRef]
- Wang, Y.; Yu, H.T.; Feng, N.J.; Wang, Y.C. Non-cascade backstepping sliding mode control with three-order extended observer for PMSM drive. IET Power Electron. 2020, 13, 307–316. [Google Scholar] [CrossRef]
- Al-Samarraie, S.A.; Gorial, I.I.; Mshari, M.H. An integral sliding mode control for the magnetic levitation system based on backstepping approach. Iop Conf. Ser. Mater. Sci. Eng. 2020, 881, 012136. [Google Scholar] [CrossRef]
- Ali, N.; Alam, W.; Pervaiz, M.; Iqbal, J. Nonlinear adaptive backstepping control of permanent magnet synchronous motor. Revue Roumaine Des Sciences Techniques—Série Électrotechnique et Énergétique 2021, 66, 9–14. [Google Scholar]
- Khalil, H.K. Nonlinear Control; Pearson: New York, NY, USA, 2015. [Google Scholar]
- Nettari, Y.; Labbadi, M.; Kurt, S. Adaptive backstepping integral sliding mode control combined with super twisting algorithm for nonlinear UAV quadrotor system. IFAC Pap. Online 2022, 55, 264–269. [Google Scholar] [CrossRef]
- Zhang, S.; Wang, Q.; Yang, G.; Zhang, M. Anti-disturbance backstepping control for air-breathing hypersonic vehicles based on extended state observer. ISA Trans. 2019, 92, 84–93. [Google Scholar] [CrossRef] [PubMed]
- Glushchenko, A.I.; Petrov, V.A.; Lastochkin, K.A. Method development of speed control of DC drive on basis of its feedback linearization. In Proceedings of the European Control Conference (ECC), St. Petersburg, Russia, 12–15 May 2020; pp. 1567–1572. [Google Scholar]
- Anjum, M.; Khan, Q.; Ullah, S.; Hafeez, G.; Fida, A.; Iqbal, J.; Albogamy, F.R. Maximum power extraction from a standalone photo voltaic system via neuro-adaptive arbitrary order sliding mode control strategy with high gain differentiation. Appl. Sci. 2022, 12, 2773. [Google Scholar] [CrossRef]
- Chand, A.; Khan, Q.; Alam, W.; Khan, L.; Iqbal, J. Certainty equivalence-based robust sliding mode control strategy and its application to uncertain PMSG-WECS. PLoS ONE 2023, 18, e0281116. [Google Scholar] [CrossRef] [PubMed]
- Ali, K.; Mehmood, A.; Iqbal, J. Fault-tolerant scheme for robotic manipulator—Nonlinear robust back-stepping control with friction compensation. PLoS ONE 2021, 16, e0256491. [Google Scholar] [CrossRef]
- Awan, Z.; Ali, K.; Iqbal, J.; Mehmood, A. Adaptive backstepping based sensor and actuator fault tolerant control of a manipulator. J. Electr. Eng. Technol. 2019, 14, 2497–2504. [Google Scholar] [CrossRef]
- Ardhenta, L.; Subroto, R.K.; Hasanah, R.N. Adaptive backstepping control for Buck DC/DC converter and DC motor. J. Phys. Conf. Ser. 2020, 1595, 012025. [Google Scholar] [CrossRef]
- Slotine, J.J.E.; Li, W. Applied Nonlinear Control; Prentice Hall: Englewood Cliffs, NJ, USA, 1991; p. 705. [Google Scholar]
- Fradkov, A.L.; Miroshnik, I.V.; Nikiforov, V.O. Nonlinear and Adaptive Control of Complex Systems; Springer Science & Business Media: New York, NY, USA, 2013. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Numerical Value | Unit |
|---|---|---|---|
| Rated Power | P | kW | |
| Rated Speed | rad/s | ||
| Armature Resistance | |||
| Field Resistance | 60 | ||
| Armature Inductance | H | ||
| Field Inductance | 60 | H | |
| Motor Constant | K | Nm/A | |
| Damping Constant | B | kgm s | |
| Inertia | J | kgm | |
| Armature Voltage | 240 | V | |
| Field Voltage | 240 | V | |
| Rated Torque | 18 | Nm |
| Control Technique | ITAE (rad/s) | IAE (rad/s) | ISE (rad/s) |
|---|---|---|---|
| FBL | |||
| SMC | |||
| AB (case 1) | |||
| AB (case 2) | |||
| AB–ISMC |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Afifa, R.; Ali, S.; Pervaiz, M.; Iqbal, J. Adaptive Backstepping Integral Sliding Mode Control of a MIMO Separately Excited DC Motor. Robotics 2023, 12, 105. https://doi.org/10.3390/robotics12040105
Afifa R, Ali S, Pervaiz M, Iqbal J. Adaptive Backstepping Integral Sliding Mode Control of a MIMO Separately Excited DC Motor. Robotics. 2023; 12(4):105. https://doi.org/10.3390/robotics12040105
Chicago/Turabian StyleAfifa, Roohma, Sadia Ali, Mahmood Pervaiz, and Jamshed Iqbal. 2023. "Adaptive Backstepping Integral Sliding Mode Control of a MIMO Separately Excited DC Motor" Robotics 12, no. 4: 105. https://doi.org/10.3390/robotics12040105