
Revolutionizing Social Robotics: A Cloud-Based Framework for Enhancing the Intelligence and Autonomy of Social Robots †
 , , , , and
, , , , and
Abstract
:1. Introduction
2. Related Works
3. Proposed Platform
3.1. Ease of Use of Operators
- Text to speech: A feature allowing for the input of Arabic text from the operator, which is then synthesized into speech by the AI agent speaker.
- Facial Expression: The capability to send commands to the facial expression AI agent to display emotions on the robot such as Happy, Sad, and Angry.
- Speech to text (continuous): A testing tab that led to the concurrent and continuous speech recognition and dynamic display on the web for the “Chatbot tab”.
- Custom web run: A testing tab to ensure web operation.
- Text chatbot: A testing tab for the chatbot, which takes operator text input and displays the chatbot response on the interface.
- Chatbot speaker: A testing tab for the speaker AI agent and chatbot.
- Chatbot: A tab that continuously recognizes speech from the microphone AI agent and synthesizes the chatbot response using the speaker AI agent in Arabic.
- UAEU department of law: A test case for the robot to deliver information on the degree programs and other details for the UAEU Department of Law. The operator selects the desired information, and the robot then describes and clarifies it.
- English chatbot: A chatbot tab that continuously recognizes speech from the microphone AI agent and synthesizes the chatbot response using the speaker AI agent in English.
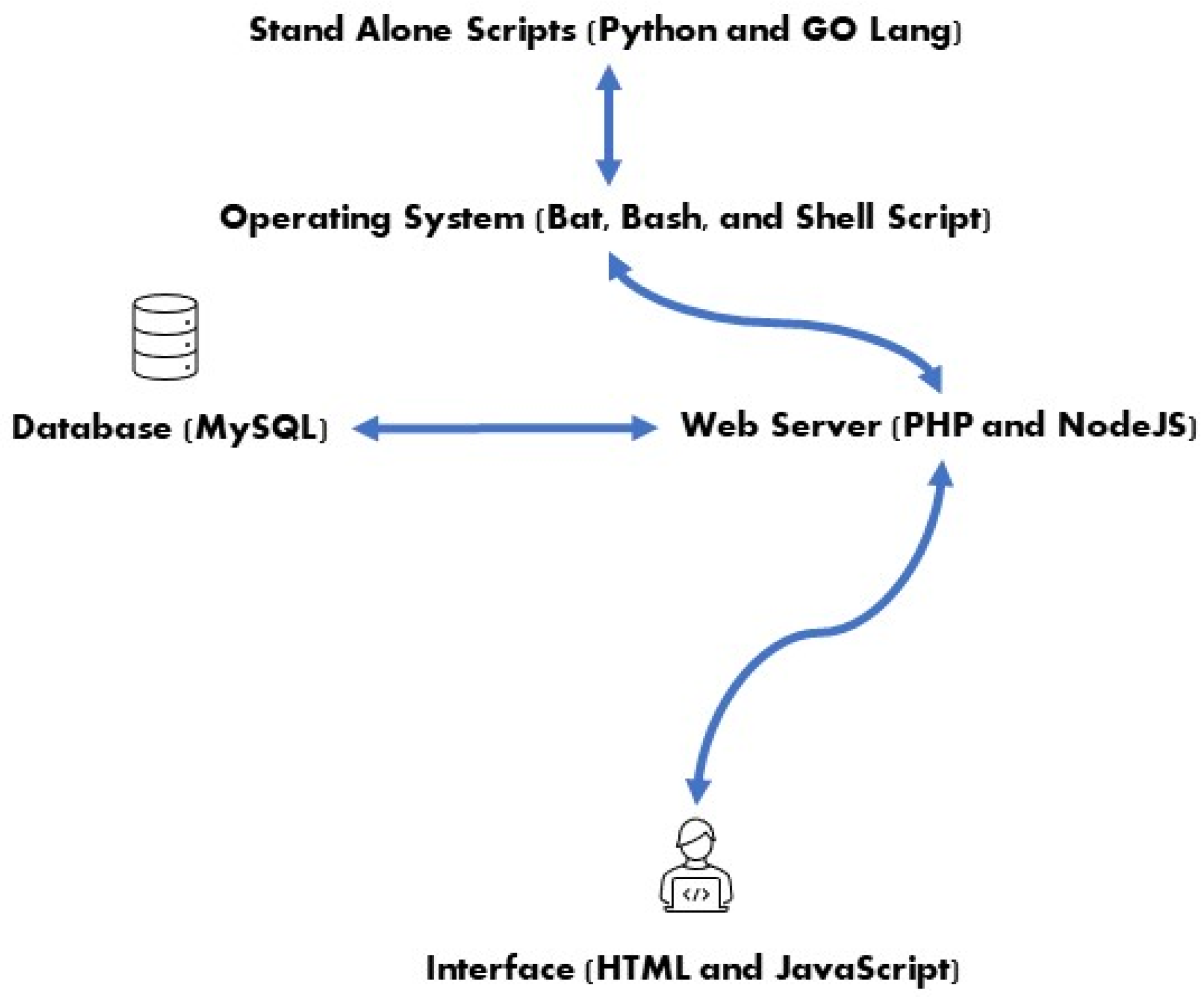
- PHP, which enabled server-side programming and facilitated functionality such as operator login/logout, admin sessions, access control, and task-loading screens.
- MySQL, which enabled database querying and manipulation for the robot chatbot and the admin’s user credentials.
- Python, which provided standalone packages and AI agents specifically for the robot.
- JavaScript (client-side), which enabled browser-side programming and dynamic browser display.
- HTML, which was used for designing the user interface and theme.
- Microsoft Windows Bat Script, which allowed for the execution of operating system commands and the concurrent launching of processes across different programming languages.
- NODEJS, a JavaScript server that supported web sockets and the dynamic sending of data from other agents.
- GO Lang, which was used as an experimental system-side concurrent processing language for the purpose of achieving faster execution speeds and improved performance.
3.2. Modularity for Parallel, Incremental Capability Growth
3.3. Adaptability to Robots and Cloud Systems
3.4. Interactivity and Versatility
- Robots: Our platform supports a wide range of robots, including BuSaif, Pepper, NAO, and Husky.
- Cloud computing infrastructure: We utilize Google and Microsoft Azure as well as a database for our cloud computing needs.
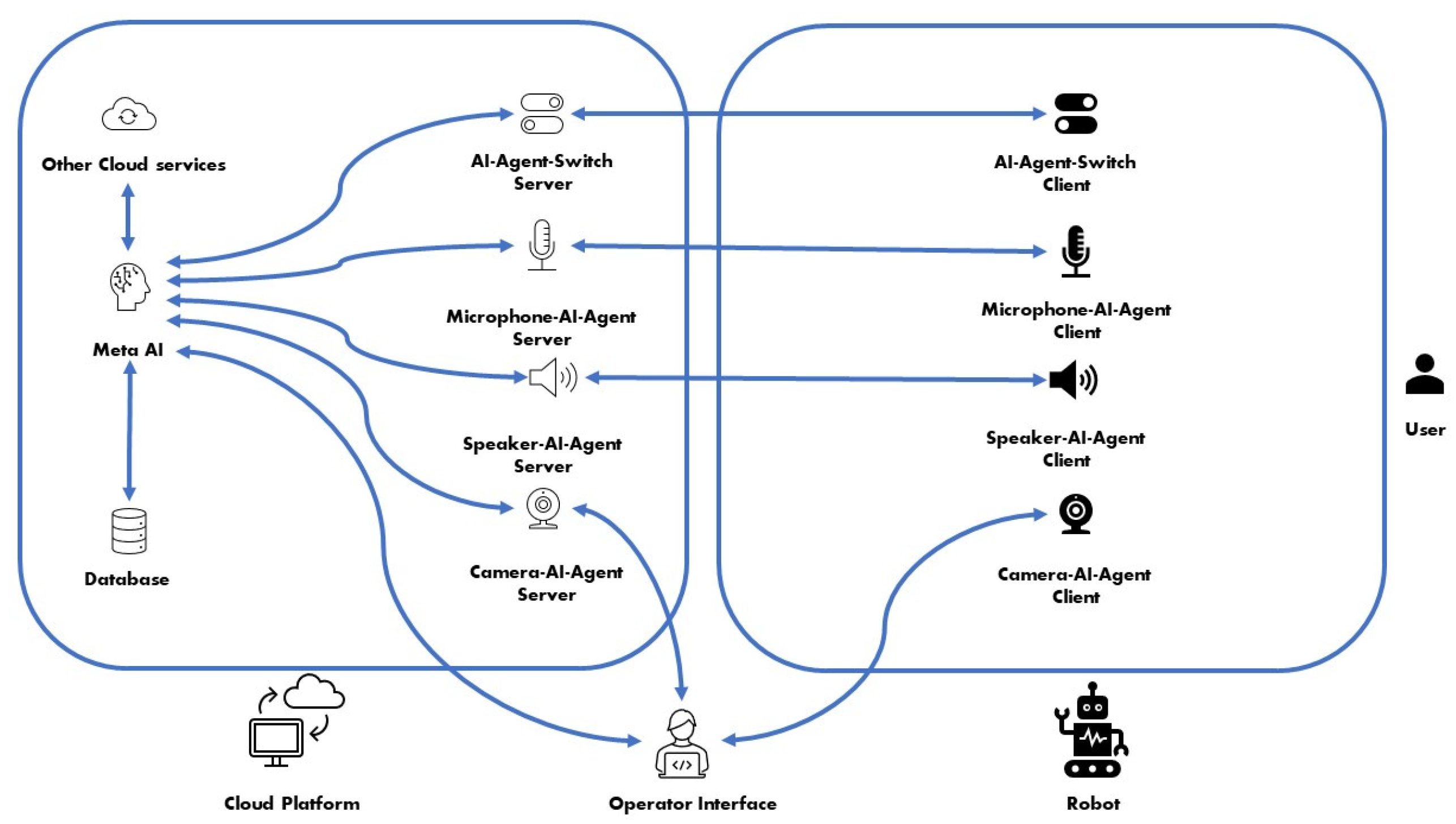
- Communication networks: Our platform supports various communication networks, including sockets, web sockets, HTTP post and get, as well as peer-to-peer media streaming through AI agents such as Microphone and Camera.
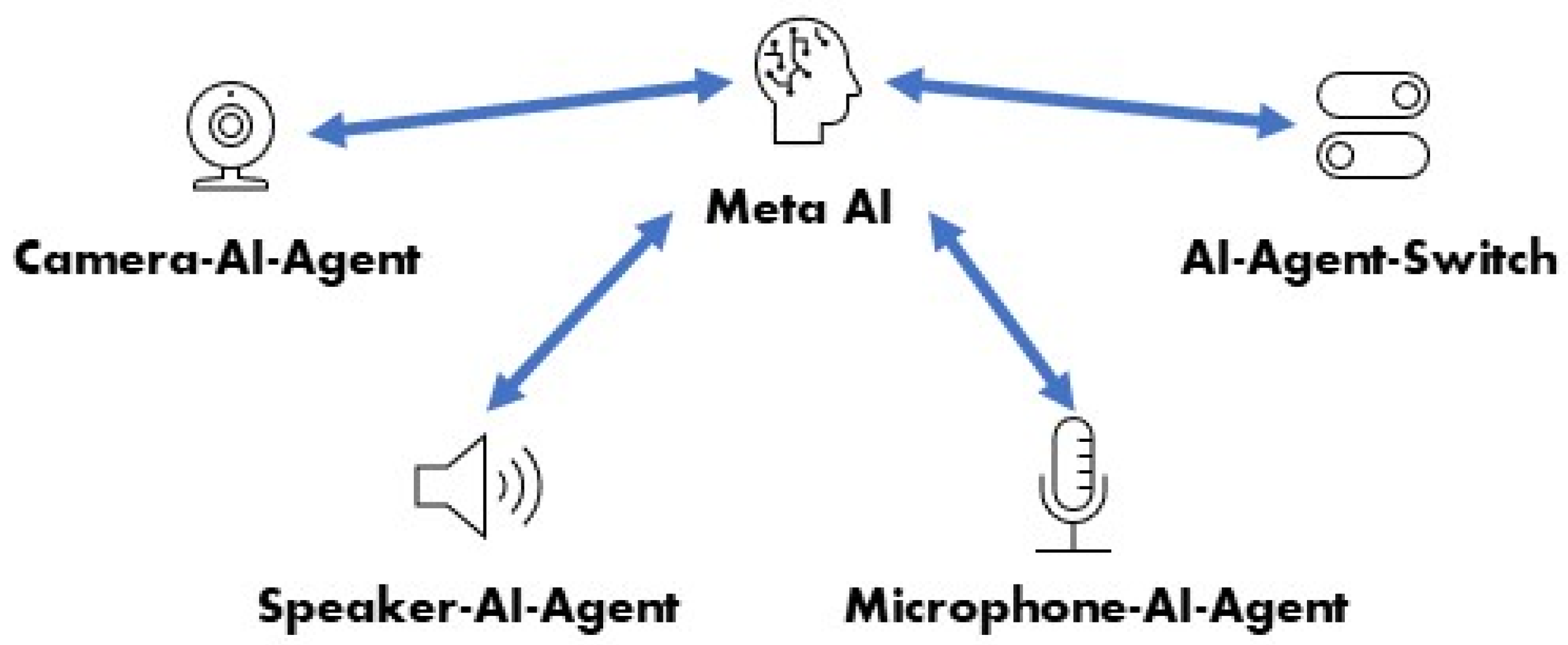
- Control and management software: We use Meta-AI as our control and management software, as depicted in Figure 2.
4. Results
4.1. Performance Analysis of a Cloud-Based Platform vs. a Local Platform for Robot Control
4.2. Responding Time
4.3. Microphone AI Agent
4.4. AI Based Chatbot Agent
4.5. Speaker AI Agent
4.6. Camera AI Agent
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Guemghar, I.; de Oliverira Padilha, P.P.; Abdel-Baki, A.; Jutras-Aswad, D.; Paquette, J.; Pomey, M.-P. Social Robot Interventions in Mental Health Care and Their Outcomes, Barriers, and Facilitators: Scoping Review. JMIR Ment. Health 2022, 9, e36094. [Google Scholar] [CrossRef] [PubMed]
- Alam, A. Social Robots in Education for Long-Term Human-Robot Interaction: Socially Supportive Behaviour of Robotic Tutor for Creating Robo-Tangible Learning Environment in a Guided Discovery Learning Interaction. ECS Trans. 2022, 107, 12389. [Google Scholar] [CrossRef]
- Saari, U.A.; Tossavainen, A.; Kaipainen, K.; Mäkinen, S.J. Exploring factors influencing the acceptance of social robots among early adopters and mass market representatives. Robot. Auton. Syst. 2022, 151, 104033. [Google Scholar] [CrossRef]
- Almeida, L.; Menezes, P.; Dias, J. Telepresence Social Robotics towards Co-Presence: A Review. Appl. Sci. 2022, 12, 5557. [Google Scholar] [CrossRef]
- Lytridis, C.; Bazinas, C.; Kaburlasos, V.G.; Vassileva-Aleksandrova, V.; Youssfi, M.; Mestari, M.; Ferelis, V.; Jaki, A. Social Robots as Cyber-Physical Actors in Entertainment and Education. In Proceedings of the 2019 International Conference on Software, Telecommunications and Computer Networks (SoftCOM), Split, Croatia, 19–21 September 2019; pp. 1–6. [Google Scholar]
- Giansanti, D. The Social Robot in Rehabilitation and Assistance: What Is the Future? Healthcare 2021, 9, 244. [Google Scholar] [CrossRef] [PubMed]
- Park, C.H.; Ros, R.; Kwak, S.S.; Huang, C.-M.; Lemaignan, S. Editorial: Towards Real World Impacts: Design, Development, and Deployment of Social Robots in the Wild. Front. Robot. AI 2020, 7, 600830. [Google Scholar] [CrossRef] [PubMed]
- Henschel, A.; Laban, G.; Cross, E.S. What Makes a Robot Social? A Review of Social Robots from Science Fiction to a Home or Hospital Near You. Curr. Robot Rep. 2021, 2, 9–19. [Google Scholar] [CrossRef]
- Social Robot—An Overview|ScienceDirect Topics. Available online: https://www.sciencedirect.com/topics/computer-science/social-robot (accessed on 18 February 2023).
- Kaptein, F.; Kiefer, B.; Cully, A.; Celiktutan, O.; Bierman, B.; Rijgersberg-peters, R.; Broekens, J.; Van Vught, W.; Van Bekkum, M.; Demiris, Y.; et al. A Cloud-Based Robot System for Long-Term Interaction: Principles, Implementation, Lessons Learned. J. Hum.-Robot Interact. 2021, 11, 1–27. [Google Scholar] [CrossRef]
- Yan, H.; Ang, M.H.; Poo, A.N. A Survey on Perception Methods for Human–Robot Interaction in Social Robots. Int. J. Soc. Robot. 2014, 6, 85–119. [Google Scholar] [CrossRef]
- Mavrogiannis, C.; Baldini, F.; Wang, A.; Zhao, D.; Trautman, P.; Steinfeld, A.; Oh, J. Core Challenges of Social Robot Navigation: A Survey 2021. arXiv 2021, arXiv:2103.05668. [Google Scholar] [CrossRef]
- Graterol, W.; Diaz-Amado, J.; Cardinale, Y.; Dongo, I.; Lopes-Silva, E.; Santos-Libarino, C. Emotion Detection for Social Robots Based on NLP Transformers and an Emotion Ontology. Sensors 2021, 21, 1322. [Google Scholar] [CrossRef] [PubMed]
- Nocentini, O.; Fiorini, L.; Acerbi, G.; Sorrentino, A.; Mancioppi, G.; Cavallo, F. A Survey of Behavioral Models for Social Robots. Robotics 2019, 8, 54. [Google Scholar] [CrossRef] [Green Version]
- Prescott, T.J.; Camilleri, D.; Martinez-Hernandez, U.; Damianou, A.; Lawrence, N.D. Memory and mental time travel in humans and social robots. Philos. Trans. R. Soc. B Biol. Sci. 2019, 374, 20180025. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- van Waveren, S.; Carter, E.J.; Örnberg, O.; Leite, I. Exploring Non-Expert Robot Programming through Crowdsourcing. Front. Robot. AI 2021, 8, 646002. [Google Scholar] [CrossRef] [PubMed]
- Ajaykumar, G.; Steele, M.; Huang, C.-M. A Survey on End-User Robot Programming. ACM Comput. Surv. 2021, 54, 1–36. [Google Scholar] [CrossRef]
- Bhattacharyya, S. What Is Cloud Robotics? Importance and Challenges|Analytics Steps. Available online: https://www.analyticssteps.com/blogs/what-cloud-robotics-importance-and-challenges (accessed on 18 February 2023).
- Hu, G.; Tay, W.P.; Wen, Y. Cloud robotics: Architecture, challenges and applications. IEEE Netw. 2012, 26, 21–28. [Google Scholar] [CrossRef]
- Lampropoulos, G.; Siakas, K.; Anastasiadis, T. Internet of Things in the Context of Industry 4.0: An Overview. Int. J. Entrep. Knowl. 2019, 7, 4–19. [Google Scholar] [CrossRef]
- Wang, X.; Alhusin Alkhdur, A.; Wang, L. Cloud-Based Robotic System: Architecture Framework and Deployment Models. In Proceedings of the 25th International Conference on Flexible Automation and Intelligent Manufacturing, Wolverhampton, UK, 23–26 June 2015. [Google Scholar]
- Turnbull, L.; Samanta, B. Cloud robotics: Formation control of a multi robot system utilizing cloud infrastructure. In Proceedings of the 2013 Proceedings of IEEE Southeastcon, Jacksonville, FL, USA, 4–7 April 2013; pp. 1–4. [Google Scholar]
- Kehoe, B.; Patil, S.; Abbeel, P.; Goldberg, K. A Survey of Research on Cloud Robotics and Automation. IEEE Trans. Autom. Sci. Eng. 2015, 12, 1–12. [Google Scholar] [CrossRef]
- Ichnowski, J.; Prins, J.; Alterovitz, R. Cloud-based Motion Plan Computation for Power-Constrained Robots. In Algorithmic Foundations of Robotics XII: Proceedings of the Twelfth Workshop on the Algorithmic Foundations of Robotics; Goldberg, K., Abbeel, P., Bekris, K., Miller, L., Eds.; Springer Proceedings in Advanced Robotics; Springer International Publishing: Cham, Switzerland, 2020; pp. 96–111. ISBN 978-3-030-43089-4. [Google Scholar]
- Kappler, D.; Bohg, J.; Schaal, S. Leveraging big data for grasp planning. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 4304–4311. [Google Scholar]
- Ermacora, G.; Rosa, S.; Toma, A. Fly4SmartCity: A cloud robotics service for smart city applications. J. Ambient. Intell. Smart Environ. 2016, 8, 347–358. [Google Scholar] [CrossRef]
- Russo, L.; Rosa, S.; Maggiora, M.; Bona, B. A Novel Cloud-Based Service Robotics Application to Data Center Environmental Monitoring. Sensors 2016, 16, 1255. [Google Scholar] [CrossRef] [Green Version]
- Tang, S.; Wan, J.; Cai, H.; Chen, F. Cloud Robotics: Insight and Outlook. In Proceedings of the Industrial IoT Technologies and Applications, Guangzhou, China, 25–26 March 2016; Wan, J., Humar, I., Zhang, D., Eds.; Springer International Publishing: Cham, Switzerland, 2016; pp. 94–103. [Google Scholar]
- Hilton, W.; Lofaro, D.M.; Kim, Y. A lightweight, cross-platform, multiuser robot visualization using the cloud. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 1570–1575. [Google Scholar]
- Hammad, A.; Ali, S.S.; Eldien, A.S.T. A novel implementation for FastSLAM 2.0 algorithm based on cloud robotics. In Proceedings of the 2017 13th International Computer Engineering Conference (ICENCO), Cairo, Egypt, 27–28 December 2017; pp. 184–189. [Google Scholar]
- Muratore, L.; Lennox, B.; Tsagarakis, N.G. XBotCloud: A Scalable Cloud Computing Infrastructure for XBot Powered Robots. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 1–9. [Google Scholar]
- Rahman, A.; Jin, J.; Wong, Y.W.; Lam, K.S. Development of a cloud-enhanced investigative mobile robot. In Proceedings of the 2016 International Conference on Advanced Mechatronic Systems (ICAMechS) Melbourne, VIC, Australia, 30 November–3 December 2016; pp. 104–109. [Google Scholar]
- Tian, S.; Lee, S.G. An implementation of cloud robotic platform for real time face recognition. In Proceedings of the 2015 IEEE International Conference on Information and Automation, Lijiang, China, 8–10 August 2015; pp. 1509–1514. [Google Scholar]
- de A. Barbosa, J.P.; do P. de C. Lima, F.; dos S. Coutinho, L.; R. Rodrigues Leite, J.P.; Barbosa Machado, J.; Henrique Valerio, C.; Sousa Bastos, G. ROS, Android and cloud robotics: How to make a powerful low cost robot. In Proceedings of the 2015 International Conference on Advanced Robotics (ICAR), Istanbul, Turkey, 27–31 July 2015; pp. 158–163. [Google Scholar]
- Coronado, E.; Mastrogiovanni, F.; Indurkhya, B.; Venture, G. Visual Programming Environments for End-User Development of intelligent and social robots, a systematic review. J. Comput. Lang. 2020, 58, 100970. [Google Scholar] [CrossRef]
- Ghiță, A.S.; Gavril, A.F.; Nan, M.; Hoteit, B.; Awada, I.A.; Sorici, A.; Mocanu, I.G.; Florea, A.M. The AMIRO Social Robotics Framework: Deployment and Evaluation on the Pepper Robot. Sensors 2020, 20, 7271. [Google Scholar] [CrossRef]
- Gavril, A.-F.; Ghita, A.S.; Sorici, A.; Florea, A.M. Towards a Modular Framework for Human-Robot Interaction and Collaboration. In Proceedings of the 2019 22nd International Conference on Control Systems and Computer Science (CSCS), Bucharest, Romania, 28–30 May 2019; pp. 667–674. [Google Scholar]
- Coronado, E.; Mastrogiovanni, F.; Venture, G. Development of Intelligent Behaviors for Social Robots via User-Friendly and Modular Programming Tools. In Proceedings of the 2018 IEEE Workshop on Advanced Robotics and its Social Impacts (ARSO), Genova, Italy, 27–29 September 2018; pp. 62–68. [Google Scholar]
- Coronado, E.; Deuff, D.; Carreno, P.; Tian, L.; Kulic, D.; Sumartojo, S.; Mastrogiovanni, F.; Venture, G. Towards a Modular and Distributed End-User Development Framework for Human-Robot Interaction. IEEE Access 2021, 9, 12675–12692. [Google Scholar] [CrossRef]
- Mcnulty-Kowal, S. Microsoft’s Azure Cloud Platform will Be the Brain for Their Future Autonomous Robots!—Yanko Design. Available online: https://www.yankodesign.com/2020/11/06/microsofts-azure-cloud-platform-will-be-the-brain-for-their-future-autonomous-robots/ (accessed on 18 February 2023).
- AI and the Need for Purpose-Built Cloud Infrastructure. Available online: https://www.microsoft.com/azure/partners/news/article/ai-and-the-need-for-purpose-built-cloud-infrastructure (accessed on 18 February 2023).
- Microsoft: We’re Bringing ChatGPT to the Azure Cloud-Computing Service. Available online: https://www.zdnet.com/article/microsoft-were-bringing-chatgpt-to-the-azure-openai-cloud-computing-service/ (accessed on 18 February 2023).
- Cloud Robotics Market Predicted to Grow to $157.8 Billion by 2030. Available online: https://roboticsandautomationnews.com/2020/07/09/cloud-robotics-market-predicted-to-grow-to-157-8-billion-by-2030/33909/ (accessed on 18 February 2023).
- Robotics 24/7 News and Resources. Available online: https://www.robotics247.com/topic/tag/Microsoft_Azure (accessed on 18 February 2023).
- Benefits of Cloud Migration|Microsoft Azure. Available online: https://azure.microsoft.com/en-us/resources/cloud-computing-dictionary/benefits-of-cloud-migration/ (accessed on 18 February 2023).
- 4 Key Advantages of Microsoft’s Azure Cloud. Available online: https://www.dyntek.com/blog/4-key-advantages-of-microsofts-azure-cloud (accessed on 18 February 2023).
- Carutasu, G.; Botezatu, M.A.; Botezatu, C.; Pirnau, M. Cloud computing and windows azure. In Proceedings of the 2016 8th International Conference on Electronics, Computers and Artificial Intelligence (ECAI), Ploiesti, Romania, 30 June–2 July 2016; pp. 1–6. [Google Scholar]
- Cepero, R. 7 Advantages of Choosing Microsoft Azure. Available online: https://bleuwire.com/advantages-choosing-microsoft-azure/ (accessed on 18 February 2023).
- Pioneering “Robotic Quarterback” Uses Windows, Azure Ecosystems to Solve Developer Dilemmas—And Cut a Year Off Time to Market. Available online: https://customers.microsoft.com/en-gb/story/1496605524271652247-monarc-windowsiot-azure (accessed on 18 February 2023).
- Robotics. Available online: https://devblogs.microsoft.com/azure-depth-platform/category/robotics/ (accessed on 18 February 2023).
- ABB Case Study. Available online: https://partner.microsoft.com/ru-kz/case-studies/abb (accessed on 18 February 2023).
- Rosly, M.A.; Miskam, M.; Shamsuddin, S.; Yussof, H.; Zahari, N. Data Linking Testing between Humanoid Robot and IoRT Network Server for Autism Telerehabilitation System Development. In RITA 2018, Proceedings of the 6th International Conference on Robot Intelligence Technology and Applications, Kuala Lumpur, Malaysia, 16–18 December 2018; Springer: Singapore, 2020; pp. 161–169. ISBN 9789811383229. [Google Scholar]
- Tian, N. Cloud-Edge Hybrid Robotic Systems for Physical Human Robot Interactions. Ph.D. Thesis, University of California, Berkeley, Berkeley, CA, USA, 2020. [Google Scholar]
- Peffers, K.; Tuunanen, T.; Gengler, C.E.; Rossi, M.; Hui, W.; Virtanen, V.; Bragge, J. Design Science Research Process: A Model for Producing and Presenting Information Systems Research 2020. arXiv 2020, arXiv:2006.02763. [Google Scholar] [CrossRef]
- Di Nuovo, A.; Varrasi, S.; Lucas, A.; Conti, D.; McNamara, J.; Soranzo, A. Assessment of Cognitive Skills via Human-Robot Interaction and Cloud Computing. J. Bionic. Eng. 2019, 16, 526–539. [Google Scholar] [CrossRef]
- Microsoft Wants to Use ChatGPT to Control Robots through Language. Available online: https://www.infoq.com/news/2023/02/chagpt-robotics-microsoft/ (accessed on 11 March 2023).
- Dawarka, V.; Bekaroo, G. Cloud Robotics Platforms: Review and Comparative Analysis. In Proceedings of the 2018 International Conference on Intelligent and Innovative Computing Applications (ICONIC), Mon Tresor, Mauritius, 6–7 December 2018; pp. 1–6. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Components | Robot Application | Database | Networking |
|---|---|---|---|
| Conventional | Robot Computer | Filesystem | Stand Alone GUI |
| Web-Based | Intranet | MySQL database | HTTP, Sockets, Web-Sockets |
| Cloud-Based | Internet | Clustered MySQL database | HTTP, Sockets, Web-Sockets |
| Index | Python GUI | General Design | Goal Design (Meta AI) |
|---|---|---|---|
| Type | Stand-Alone | Web-Platform | Cloud-Platform |
| Process | Single | Concurrent | Concurrent |
| Start-Time | 9 s | 1 to 4 s | Depends on cluster specification |
| Mic | Recognize-Once | Continuous | Continuous |
| Chatbot | Folder | Database | Cluster-Database |
| Speaker | Synthesis | Socket-Synthesis | Compiled Language |
| Camera | Tensorflow-Caffe | Go-Tensorflow JS | Depends on cluster specification |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Elfaki, A.O.; Abduljabbar, M.; Ali, L.; Alnajjar, F.; Mehiar, D.; Marei, A.M.; Alhmiedat, T.; Al-Jumaily, A. Revolutionizing Social Robotics: A Cloud-Based Framework for Enhancing the Intelligence and Autonomy of Social Robots. Robotics 2023, 12, 48. https://doi.org/10.3390/robotics12020048
Elfaki AO, Abduljabbar M, Ali L, Alnajjar F, Mehiar D, Marei AM, Alhmiedat T, Al-Jumaily A. Revolutionizing Social Robotics: A Cloud-Based Framework for Enhancing the Intelligence and Autonomy of Social Robots. Robotics. 2023; 12(2):48. https://doi.org/10.3390/robotics12020048
Chicago/Turabian StyleElfaki, Abdelrahman Osman, Mohammed Abduljabbar, Luqman Ali, Fady Alnajjar, Dua’a Mehiar, Ashraf M. Marei, Tareq Alhmiedat, and Adel Al-Jumaily. 2023. "Revolutionizing Social Robotics: A Cloud-Based Framework for Enhancing the Intelligence and Autonomy of Social Robots" Robotics 12, no. 2: 48. https://doi.org/10.3390/robotics12020048