1. Introduction
Recent advances in machine learning frameworks, namely, deep learning, and the advent of general-purpose parallel processing architectures have created a new paradigm for remote sensing. Neural networks as a machine learning framework are unique as compared to classic techniques in their ability to, via adaptation of network parameters (weights), provide robust function estimation. In fact, it has been shown that a sufficiently wide, single-layer neural network using a sigmoid nonlinearity can approximate any continuous function [
1]. By selecting the correct weights, a neural network can perform regression or classification tasks with great accuracy on high-dimensional data. The process of using data to perform optimization of network weights is referred to as training.
The computer vision field has advanced significantly since the introduction of AlexNet in 2012. This neural network utilized five convolutional layers, trained on a graphics processing unit (GPU) to achieve what was then state-of-the-art performance on image recognition and classification tasks [
2]. Since this proof of concept, much research has been conducted in the realm of machine vision, that has resulted in neural network architectures that far outperform AlexNet for machine vision tasks. Research has revealed that convolutional layers act as feature detectors, and increasing the number of stacked convolutional layers (the network depth) enables better network performance [
3]. Furthermore, it was discovered that while neural networks are valued for their function estimation capabilities, they often fail to estimate an identity function. The introduction of residual units via skip connections between layers was presented as a partial solution to this problem, enabling the training of even deeper convolutional networks [
4].
While deep convolutional neural networks exhibit state-of-the-art performance on machine vision tasks when properly trained, the training process is computationally intense. The original AlexNet network contained over 60 million tunable weights and took 5–6 days to train [
2]. Adding more convolutional layers to increase the network depth generally serves to increase the number of weights in the network. In addition, increasing the weight count of a network requires more data for the network to train on, to prevent overfitting of the network to training data and improve generalization. Thus, there exists an inherent tradeoff between the ultimate performance of a neural network and the difficulty of training.
Transfer learning, inspired by the psychology of human learning, aims to reduce the computational and dataset requirements necessary to generate well-trained neural networks by applying knowledge gained from past experiences to new learnings in a similar domain [
5]. A practical example of transfer learning in the field of machine vision can be seen in convolutional filters. As mentioned, each convolutional layer of a network acts as a feature detector. Features are aggregated as they pass through successive layers, enabling emergent features, such as the presence of an object, to be constructed from low-level features such as the presence of an edge or corner. The features output from the final convolutional layer can then be used to classify an image. This enables pretrained convolutional layer filters to be shared between image classification tasks, as features such as edges, corners, and shapes are generally shared between all images. Transfer learning has shown great success in the domain of autonomous weed control. Classification of RGB images of eight in situ invasive plant species using transfer learning of a ResNet-50 convolutional network achieved a test accuracy of 95.7% on a dataset comprising 17,509 images [
6].
Continual learning, also referred to as lifelong learning, has emerged in recent years and seeks to autonomously augment network training over time, without retraining over prior data. A challenge to continual learning is the loss of prior knowledge, which can lead to catastrophic forgetting. Rostami et al. developed a continual learning computational model that generates pseudo-data points to replay past experiences, thereby addressing catastrophic forgetting [
7]. Jha et al. applied continual learning to human activity recognition [
8]. Ashfahani et al. proposed an autonomous deep learning methodology, featuring a self-constructing network structure [
9], while Li et al. proposed an immune-system-inspired classification method [
10].
Machine learning also has direct applicability to the management of aquatic invasive plants (AIPs). Work by Patel et al., utilizing AlexNet, revealed that deep neural networks can accurately classify submersed aquatic vegetation (SAV) captured in hydroacoustic imaging [
11]. Non-native AIPs, such as
Hydrilla verticillata (L.f.) Royle (hydrilla), promote adverse situations among native aquatic environs and the related infrastructure within invaded waterways. Since AIPs generally lack natural predation, once established, they reduce aquatic ecosystem biodiversity through resource competition, displacement, and habitat disruption of native flora and fauna [
12]. Further, the monetary hindrance associated with AIPs is equally noteworthy, since invasive aquatic weeds regularly inhibit recreational boating activities, obstruct drainages, limit municipal and hydropower water supply, and can reduce waterfront property values [
13]. In the United States alone, greater than 100 million dollars (USD) are spent annually for the management of AIPs [
14].
Aquatic resource management frequently relies on well-timed monitoring and mapping strategies to gauge the presence and abundance of AIPs. In the United States, boat-based point-intercept sampling protocols remain the standard for documenting the spatiotemporal patterns in the occurrence and distribution of AIPs within invaded waterbodies [
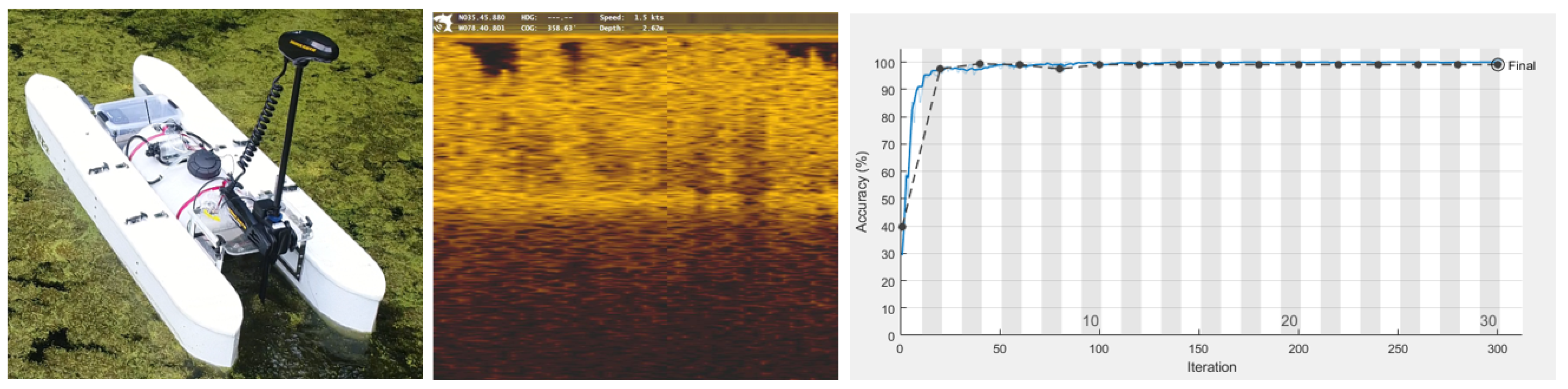
15]. However, AIP assessments require a skilled survey crew and substantial time to complete a comprehensive survey, and the precision and scale of these surveys is highly dependent upon the time spent evaluating each sample point location. To overcome the aforementioned hindrances of point-intercept surveys, AIP practitioners are actively pursuing recent advances in off-the-shelf remote sensing and photogrammetric technologies, specifically sUASs (small Unmanned Aircraft Systems) and sonar-equipped aquatic drones. Recent work has focused on the development of a small fleet of fully autonomous boats (
Figure 1) capable of subsurface hydroacoustic imaging and herbicide deployment (for vegetation control) [
11]. These multihulled vehicles, with a single on-shore operating station, have been tested in a variety of weather conditions and have demonstrated reliable, accurate tracking performance with little to moderate wind (4.5 m/s, 10 mph), extended battery life (estimated at 8 or more hours), and operation speeds of up to 2.3 m/s. Machine learning classification algorithms, developed as a component of this research, achieved a classification accuracy of 99.06% after training on four fully submersed plant species categories (hydrilla,
Cabomba caroliniana A. Gray (cabomba),
Ceratophyllum demersum L. (coontail), or “other”). However, these algorithms could not effectively process data from floating vegetation or SAV at the surface of the water column (i.e., “topped out”), since the structure of the plant canopy was above the sensing view of the hydroacoustic sensor in these cases.
Despite the potential to reduce expenditures associated with AIP surveys, sUAS-based true-color (RGB) cameras and hydroacoustic (sonar) sensing technologies have limitations regarding the classification of SAV; neither is consistently proficient at producing robust, interpretable imagery with variable depth, turbidity, SAV biovolume (percent of water column occupied with SAV), and poor light conditions. However, each sensing technology does provide unique opportunities to overcome specific deficiencies of the other. For example, hydroacoustic sensors can provide a clear view of the lakebed (benthos) and are unimpeded by environmental factors such as sun glint and turbidity. Unfortunately, the spatial resolution of hydroacoustic sensing is low, limiting the ability to distinguish plant features and sense at, or near, the surface of the water column. Conversely, aerial RGB sensing provides high-resolution images of the upper portion of the water column but is highly impeded by environmental conditions, specifically water column turbidity, wave action (fetch), and sun glint.
Fusing the sensing capabilities of sUASs and aquatic drones could exploit the strengths of each modality for improved SAV classification accuracy. The objective of this work is to integrate neural networks, incorporating both hydroacoustic and aerial RGB imagery, for real-time classification of SAV. Methods will utilize transfer learning, via a ResNet-50 model, with weights pretrained on the ImageNet dataset.
3. Results
Classification performance was evaluated for the hydroacoustic and RGB ResNets and each of the different fusion methodologies.
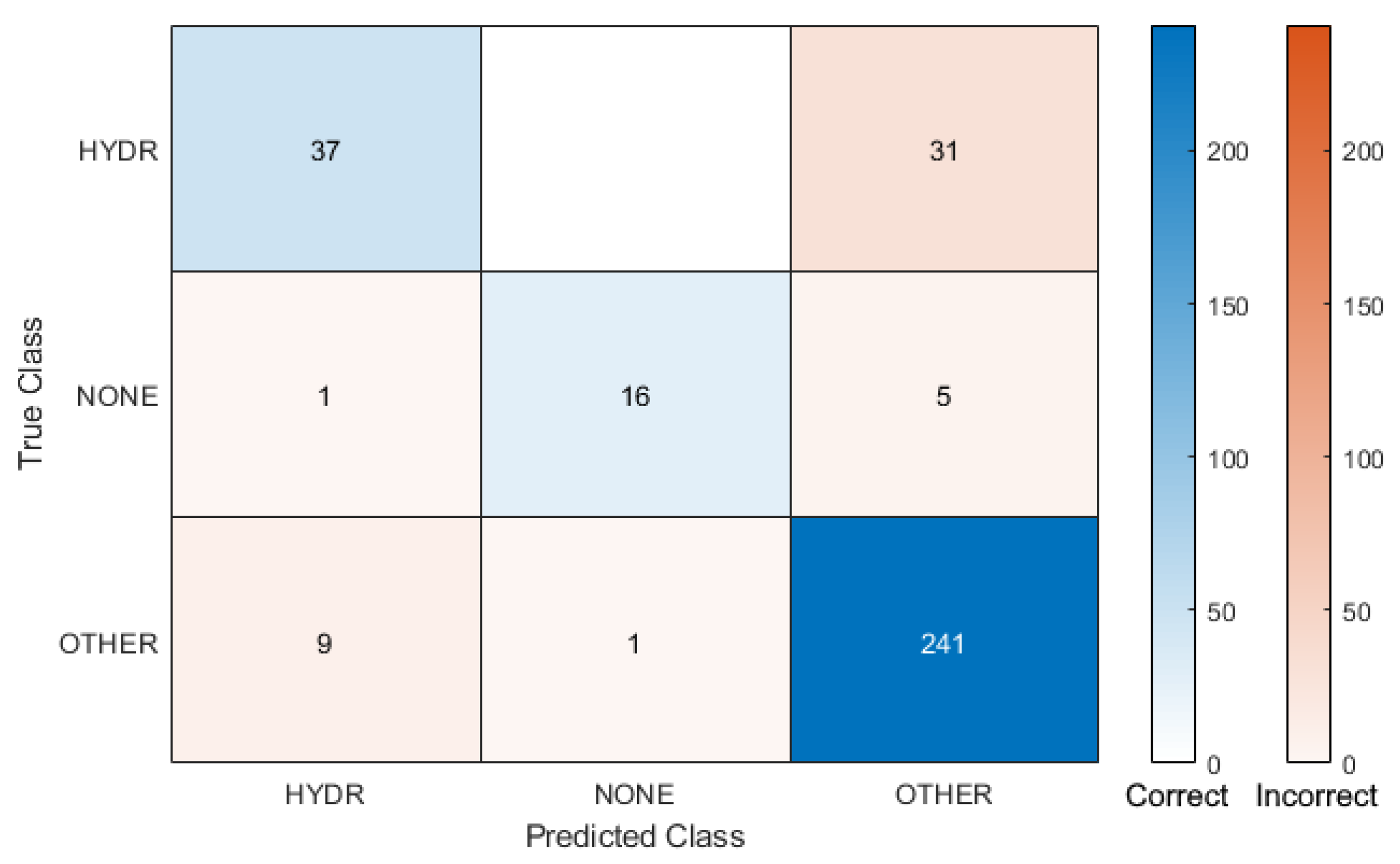
Figure 5 shows the confusion matrix resulting from initial training of the ResNet on hydroacoustic imagery. While the network achieves overall test set accuracy of 86%, it exhibits an obvious bias towards the “OTHER” class, largely due to class imbalances in the dataset. Moreover, the network exhibits obvious difficulty distinguishing between instances of hydrilla and other subaquatic species. This is illustrated by the poor recall score of 54.4% percent for hydrilla, and the precision score of 78.7%. However, in the limited test data, the network exhibits strong discriminatory performance between images with presence of SAV and those with no SAV present. The network exhibits 72.7% recall, but crucially 94.1% precision for the “NONE” class. These results fall in line with the expected. Hydroacoustic imagery is excellent at detecting the presence of submerged objects but gives relatively low image resolution, making detection of distinguishing features between species difficult.
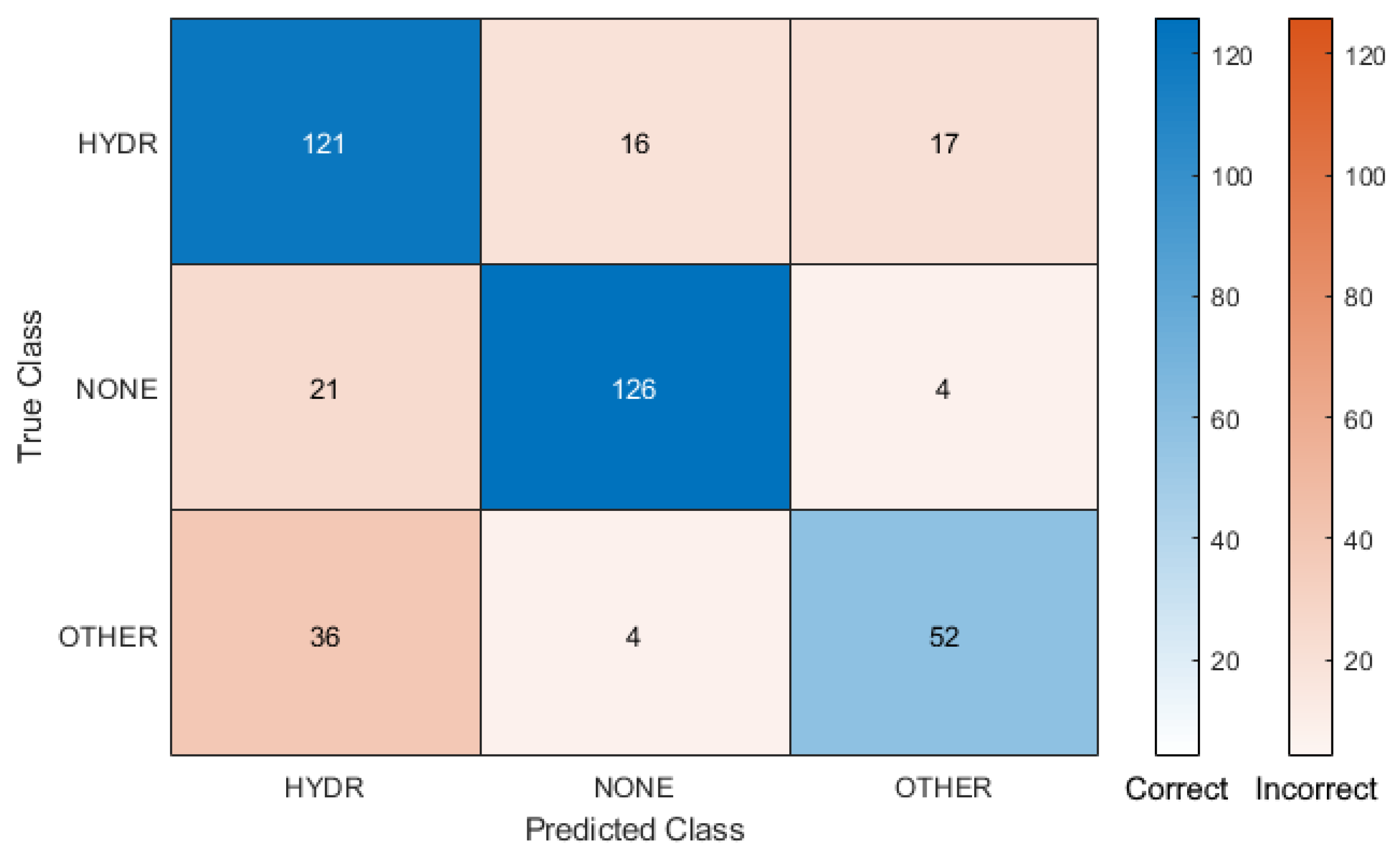
Figure 6 shows the confusion matrix generated on test data from a ResNet trained on aerial RGB imagery. The network achieves overall test accuracy of 75%, significantly worse than the performance seen when utilizing the hydroacoustic imagery. However, crucial to overall performance is the relative distribution of error between classes and the individual precision and recall scores. The network achieves 78.6% recall for hydrilla, meaning that it correctly identified 78.6% of the test images labeled as hydrilla, as compared to 54.4% recall for hydrilla when utilizing hydroacoustic data. Once again, these results fall in line with the expected. The relatively high resolution of aerial RGB pictures allows for identification of SAV near the top of the water column. Misclassifications between images labeled as “HYDR” and those labeled none occur when the turbidity of the water prevents SAV from being visually present in aerial images.
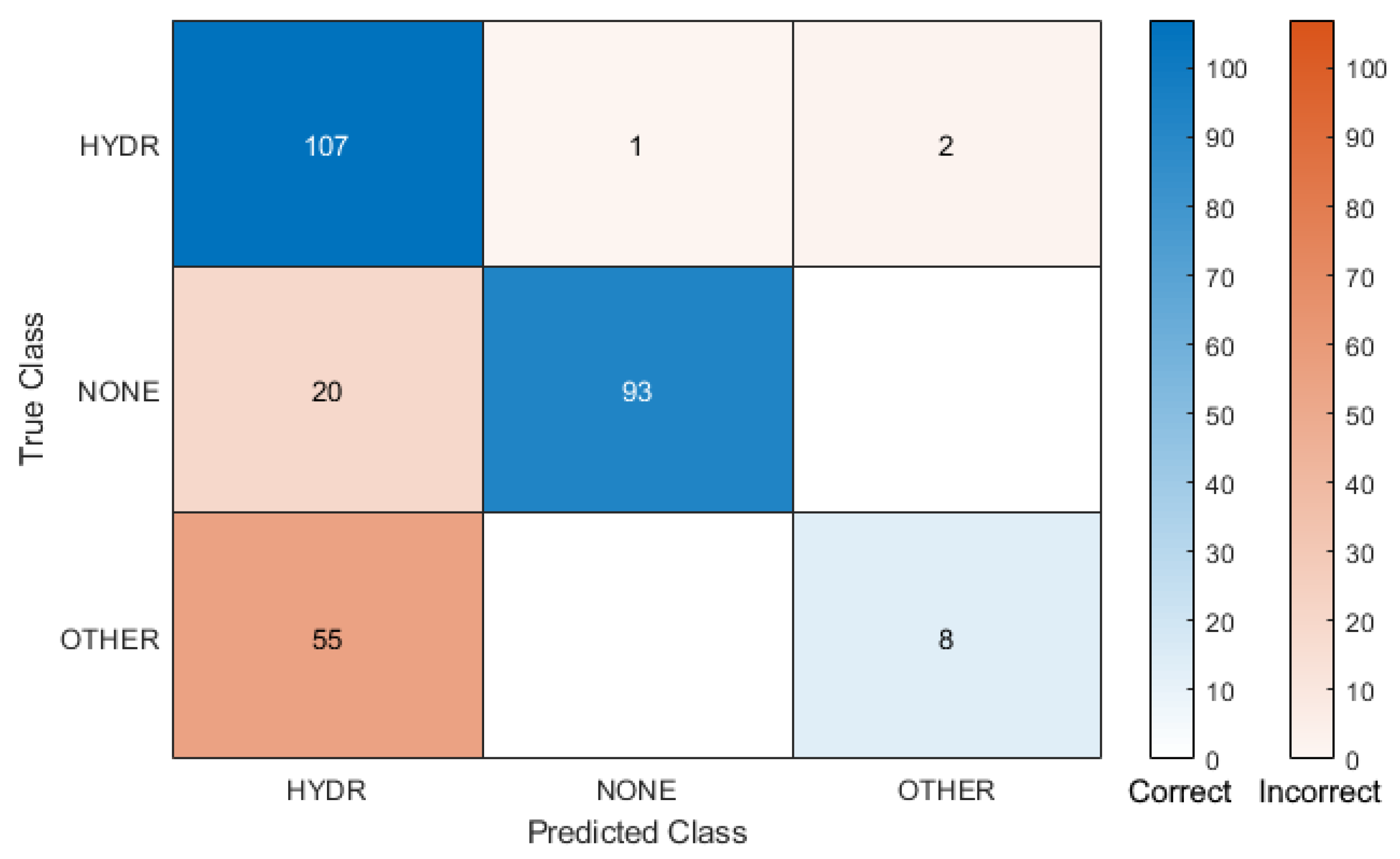
Figure 7 shows the confusion matrix generated by a simple, average-type bagging ensemble of the aerial RGB and hydroacoustic imagery. The ensemble has excellent recall performance for instances of hydrilla, but otherwise performs poorly in terms of precision. Moreover, the network performs poorly in terms of recall for both the “NONE” and “OTHER” classes. Examination of the test set confusion matrix for the hydroacoustic imagery alone reveals the tendency to predict any image with the presence of SAV as “HYDR”, hence the tendency in an average-based prediction model to overpredict instances of “HYDR.”
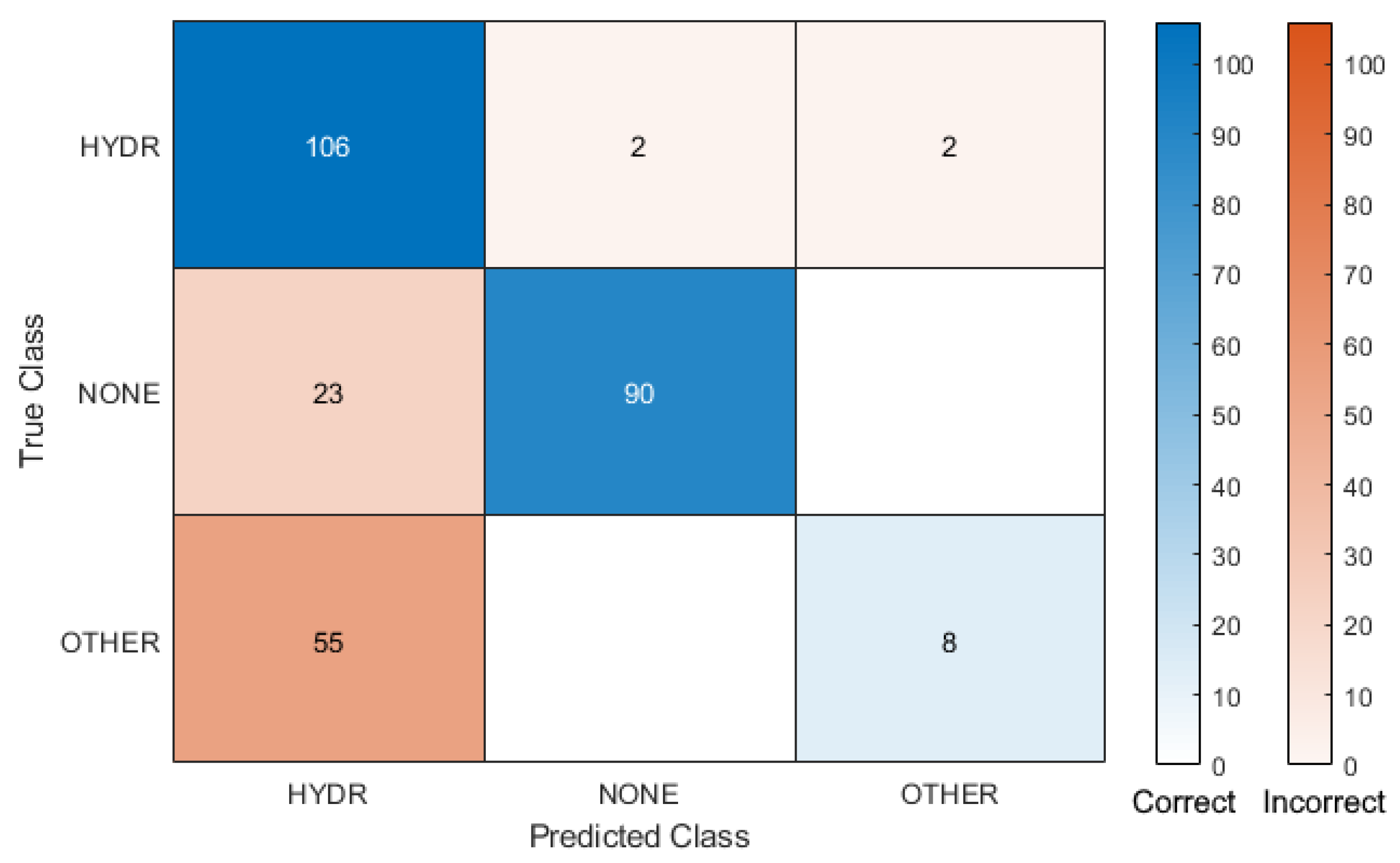
Figure 8 shows the confusion matrix generated by log-inverse uncertainty weighting for predictions generated by an MC Dropout type network. Results are nearly identical to those generated by the simple average ensemble. Again, the tendency of the hydroacoustic-based pipeline to confidently overpredict instances of the “HYDR” class results in an ensemble that, based on a weighted average, tends to overpredict “HYDR.”
Finally,
Figure 9 and
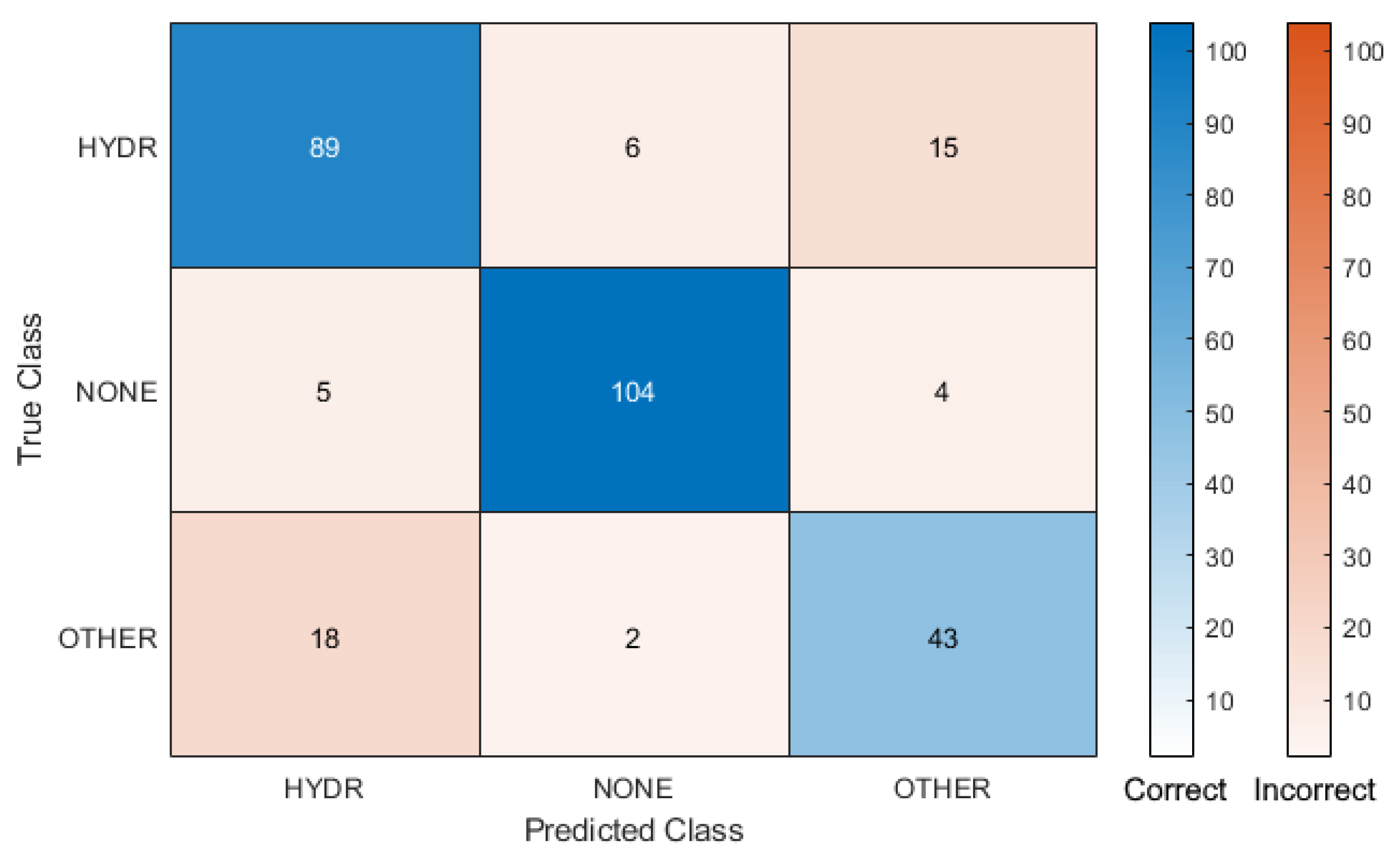
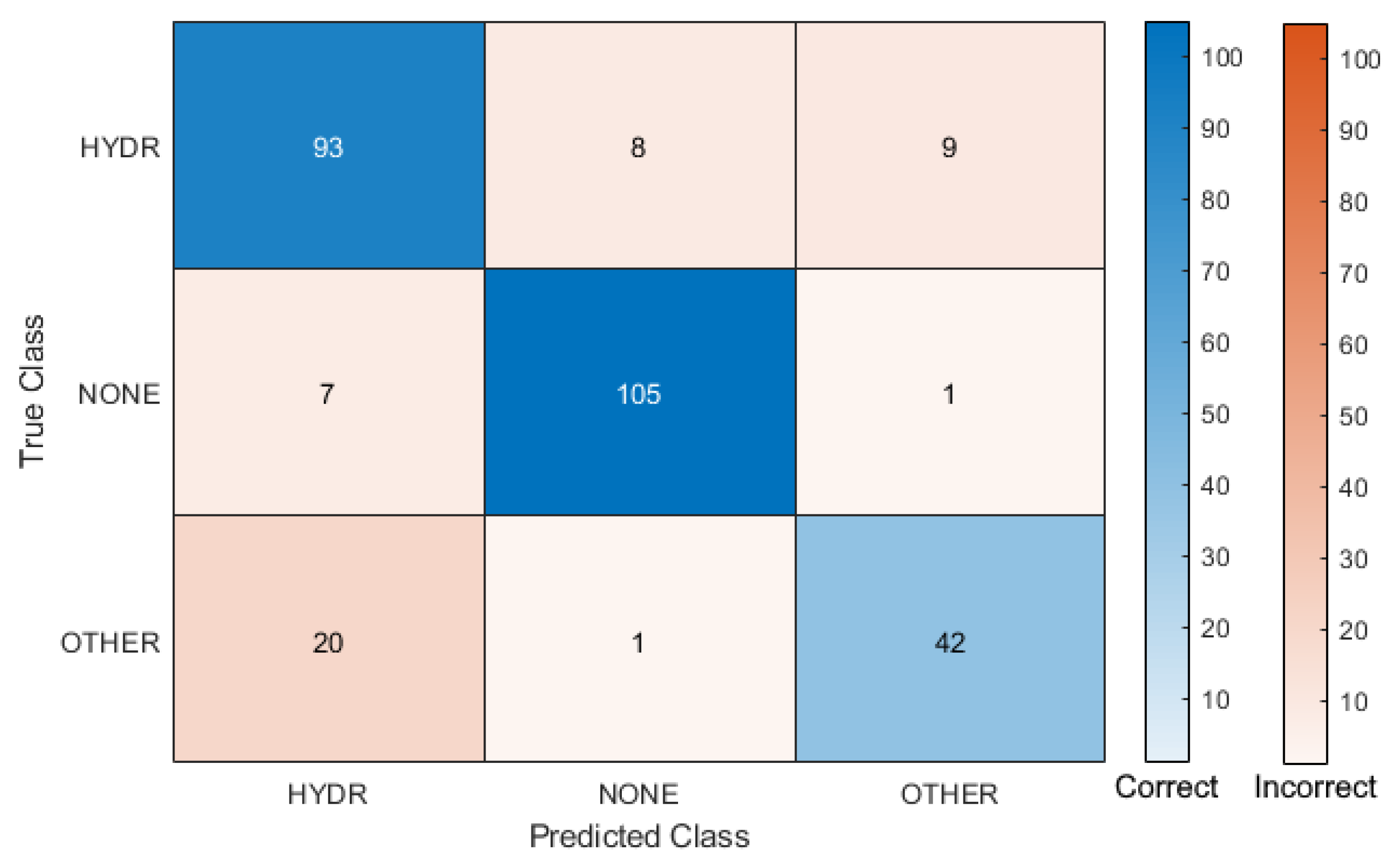
Figure 10 show the result of a logic-based approach to ensembling the two image types. The pure logic ensemble utilizes the vertical profile of the water column and robustness to turbidity of hydroacoustic imagery to accurately predict the presence or absence of SAV through the “NONE” classification. If SAV is detected through the hydroacoustic image, aerial RGB imagery is utilized to classify the present species as either “HYDR” or “OTHER.” The logic/MC combination follows the same procedure but applies the Monte Carlo dropout approach to predictions before applying the logical procedure. Both logic-based approaches vastly outperformed the weighted averaging approaches presented earlier, with overall test set classification accuracy reaching 84% for the logic/MC approach. In addition, precision and recall performance were generally improved across all classes (
Table 1).
To assess performance with another network architecture, network training and testing were repeated for the six approaches above with the DenseNet model. Identical training and test datasets and methods were used for both the ResNet and DenseNet models. The DenseNet architecture yielded lower or nearly equal (within 0.3%) overall accuracy for all but the average ensemble approach (DenseNet average overall accuracy 69.0% vs. 70.9% for ResNet). In five out of six approaches, the DenseNet model produced lower classifications of HYDR (average 14.6% fewer) and higher classifications of NONE (average 8.3% higher) and OTHER (average 16.3% higher) compared to the ResNet model.
4. Discussion and Conclusions
Results indicate that sensor fusion can improve the automated classification of SAV relative to the performance provided by each of the individual sensing modalities. Acoustic imaging provided high precision in detecting the absence of SAV at all depths (NONE class), while neural networks trained on RGB images better distinguished hydrilla from other SAV. When ensembling outputs from the two modalities, applying logic provided the most notable improvement in classification accuracy. While not tested for statistical significance, combining the MC Dropout approach with logic provided a slight improvement to overall accuracy.
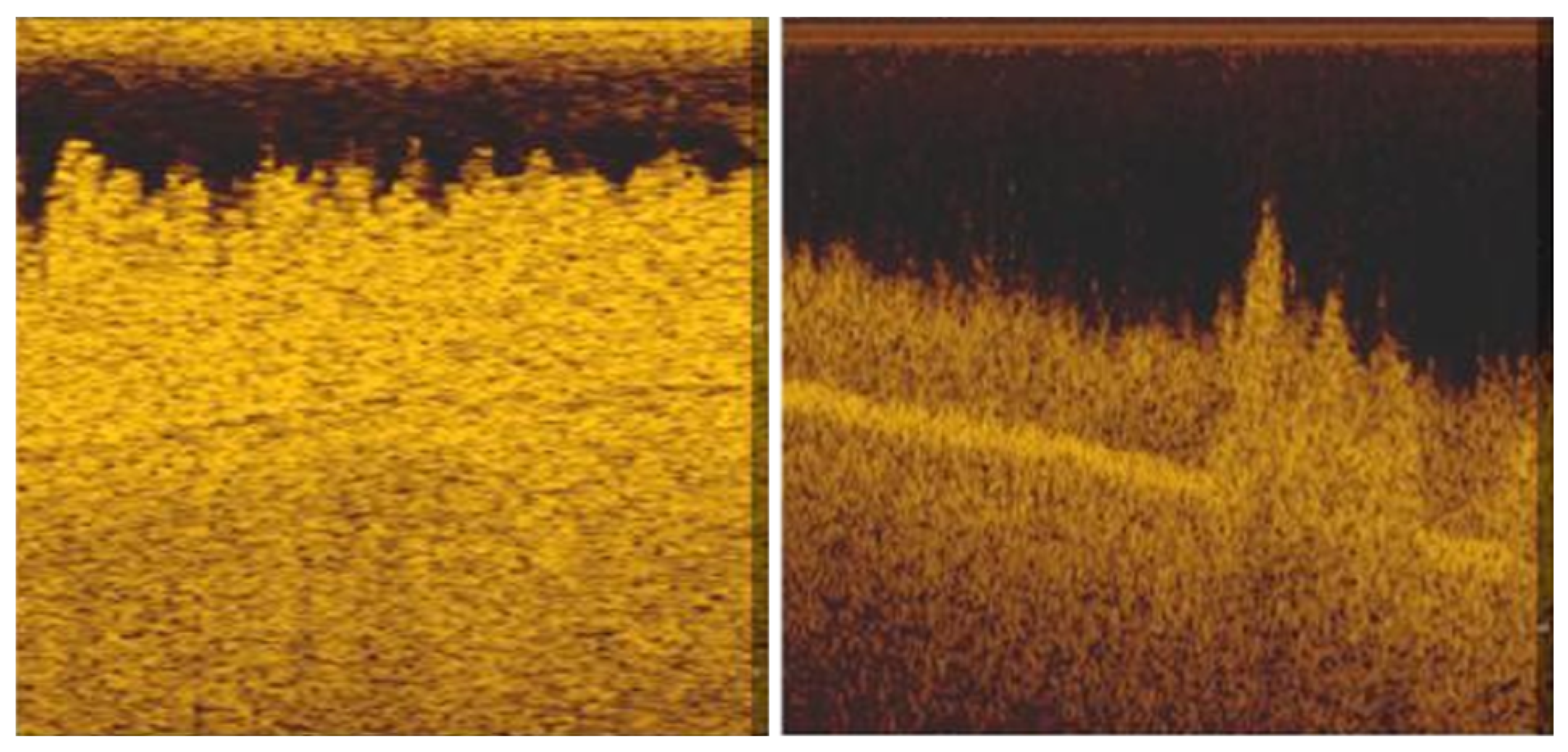
One area of particular interest was the tendency of the hydroacoustic imagery to overpredict instances of the “HYDR” class in test set data.
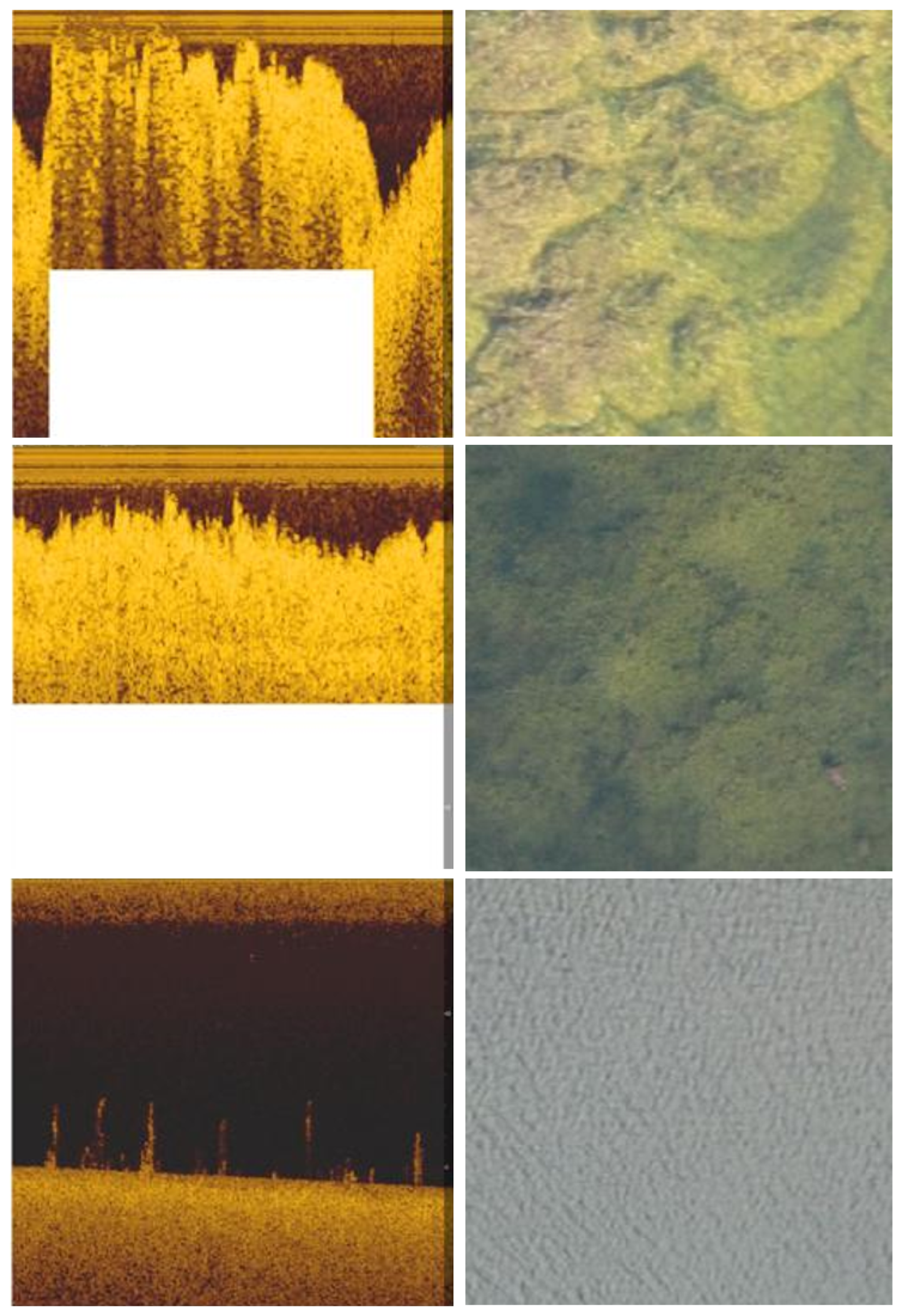
Figure 11 shows representative images selected from the training data for the “HYDR” class images and test data selected from the “OTHER” class images.
In both images, the lake bottom is visually distinguishable, as well as vertical growth of bands of SAV beginning at the lake bottom. Due to the image resolution of hydroacoustic imagery and lack of color information available, little information is present in either image that can be used to distinguish between each species. Because of this, it is plausible that the hydroacoustic network learns to classify images fitting the form described above as “HYDR,” leading to frequent misclassifications. Aerial RGB imagery helps to remedy the lack of identifying information present in hydroacoustic images due to its much higher pixel resolution and the presence of color, shape, and depth information present in the feature-rich RGB spectrum. The result of the fusion of information is a network that is able to robustly detect the presence or absence of SAV across the range of water column heights, while also providing relatively high-accuracy classification of SAV near the top of the water column. However, there exists a range in the water column where classification accuracy performs poorly. When factors such as lake depth, turbidity, sun glint, wave action, and plant height render the SAV difficult to view from aerial imagery, hydroacoustic data are able to effectively identify the presence of SAV but often fail to distinguish between species.
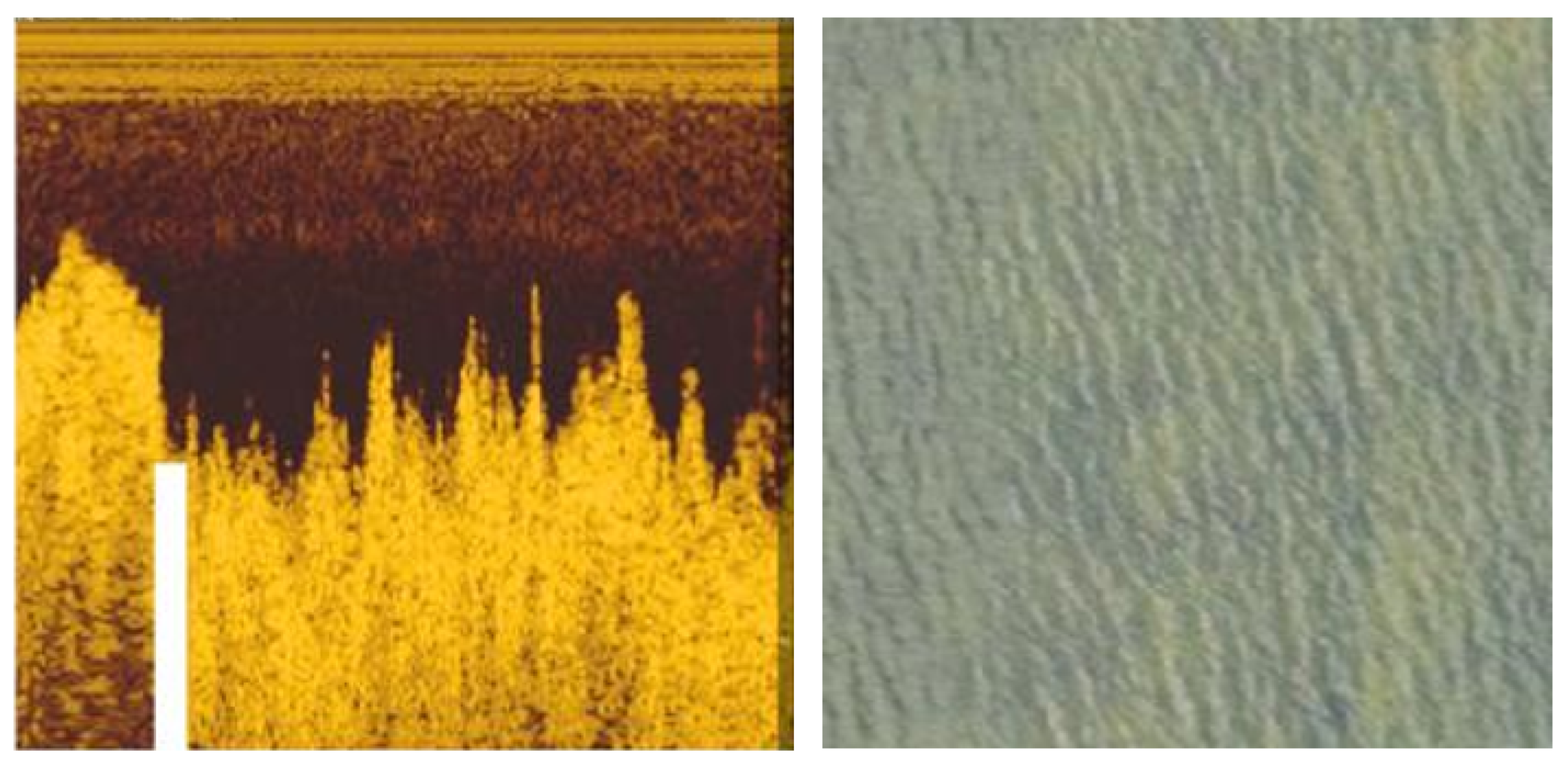
Figure 12 shows an example of test set misclassification, where SAV obscured partially by wave action and plant depth is identified but misclassified.
Clearly, the growth of hydrilla is still present in the aerial RGB image. However, the features of the hydrilla growth used by the RGB-based neural network to perform classification are distorted as light passes through the water column. Consequently, the combined network is unable to consistently generate the correct classification of “HYDR” for the image pair shown.
While current classification performance still leaves room for improvement, the multi-sensor fusion approach for classification of subaquatic plant species demonstrates the potential to increase generalization and improve classification performance. Current fusion of aerial RGB imagery and hydroacoustic imagery exhibits classification performance that decreases as a function of increasing water turbidity and plant depth within the water column. However, all sensor data required for classification performance (hydroacoustic and RGB) are currently collected during a typical mapping operation. Addition of a third sensor, such as high-definition RGB images taken below the water surface, could provide the supplementary information needed to provide accurate classification in deeper water outside of the littoral zones. Alternatively, utilization of hydroacoustic systems with higher-definition imaging capabilities could potentially provide the same benefits, while maintaining the same runtime computational complexity and data collection burdens.
At the time of this publication, real-time classification utilizing the sensor fusion concept of this paper is currently under development. This methodology utilizes a Windows laptop running MATLAB and Python scripts, for data processing and classification, and a wireless SD card (Toshiba FlashAir, Toshiba, Tokyo, Japan) to transmit sonar log data from the sonar head unit to the laptop. UAV-based RGB images are captured asynchronously, prior to classification, and copied to the laptop hard drive. Tests to date indicate that sonar data collection and processing and sensor fusion classification can be performed in real time; however, transmission of sonar log data via the wireless SD card is currently inconsistent.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}