
A Screw Theory Approach to Computing the Instantaneous Rotation Centers of Indeterminate Planar Linkages

 , , and
, , and
Abstract
:1. Introduction
- The method requires a reduced set of equations. It will be shown that the development of the complete graph of the IRCs of the linkage, as proposed by Kung and Wang [14], is unnecessary. More specifically, by properly selecting a pair of sub-graphs of the complete graph, the determination of all secondary IRCs can be readily obtained;
- The required equations are simpler. The method presented by Di Gregorio [13] requires the solution of a nonlinear set of 10 equations, in one case, and a nonlinear set of 12 equations, in another case. The method presented by Kung and Wang [14] requires first the solution of a quadratic equation and, later, the solution of a quartic equation. The method presented in this contribution only requires the solution and comparison of 2 quadratic equations in one case, and a quadratic and a cubic equation in the other.
2. The Fundamental Equation for the General Aronhold–Kennedy Theorem
- are orthogonal concerning the Klein form (also called reciprocal):
- are orthogonal regarding the Killing form (also called perpendicular):
2.1. The Simplification for Planar Linkages
2.2. Application of the Killing and Klein Forms to Planar Linkages
3. First Case Study: A “Single Flyer” Eight-Bar Linkage
3.1. Equations for the Location of Secondary IRCs




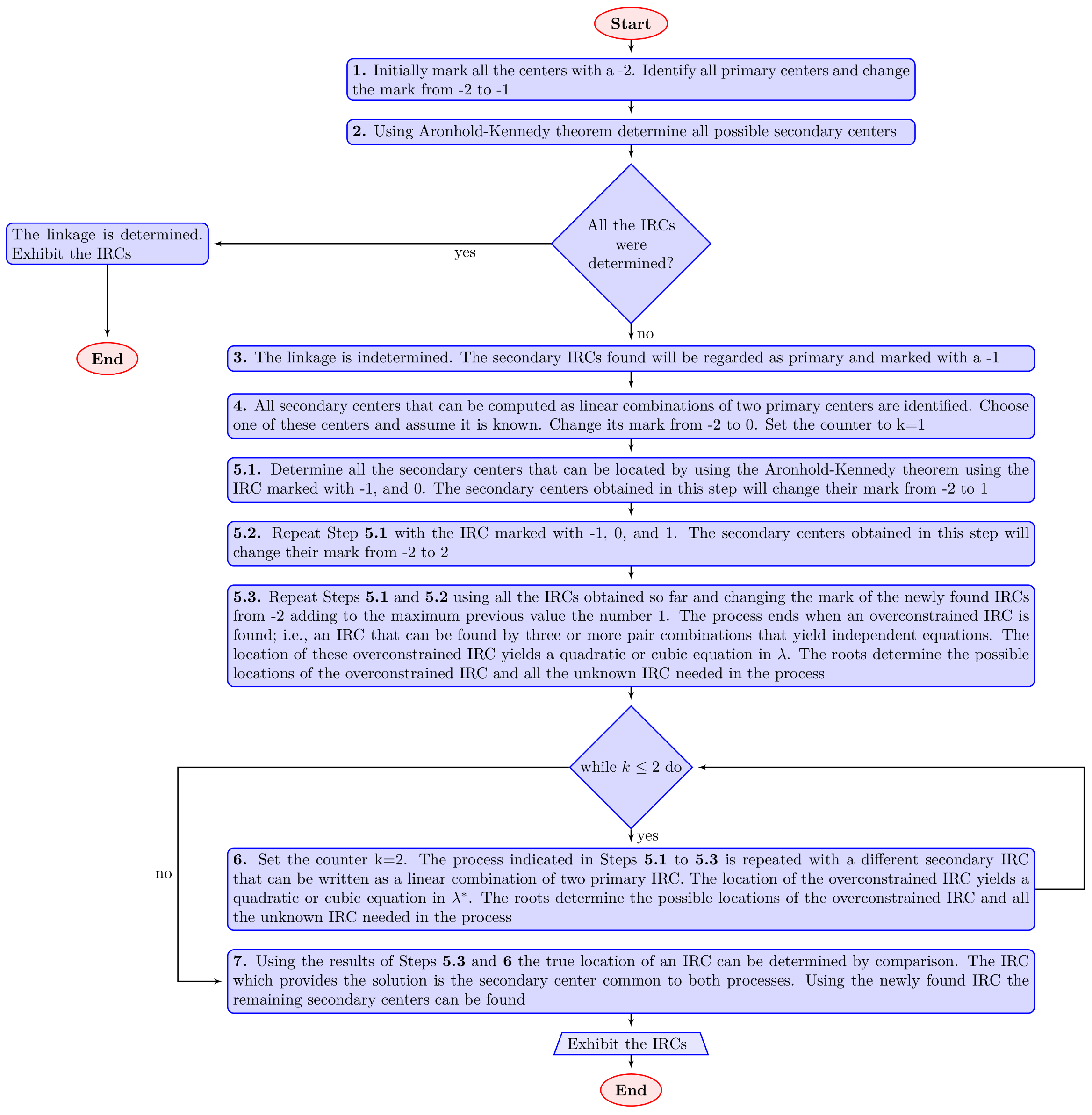
- Step 4.
- Choose a secondary center, , whose location can be written as a linear combination of the position of two primary centers, namely, those marked with the number . Appendix A shows the procedure to accomplish this task; the secondary center can be written in terms of only one variable, denoted or . From a theoretical point of view, any such center can be employed. However, it is convenient to choose secondary centers that yield a minimum number of equations. The marking of this secondary center will change from to 0, and it will be assumed that its location is known. Set the counter .
- Step 5.1.
- Determine all the secondary centers that can be located by the Aronhold–Kennedy theorem using the centers marked with and 0, namely, the center chosen in step 1. The secondary centers obtained in this step will change their mark from to 1.
- Step 5.2.
- Repeat Step 5.1, but now, it is necessary to locate all the secondary centers that can be determined, by using the Aronhold–Kennedy theorem, on the IRCs marked with the numbers , 0, and 1. The IRCs obtained in this step will change their mark from to 2.
- Step 5.3.
- Repeat Step 5.2 using all the secondary centers obtained so far and changing the mark of the newly found IRCs, adding to the maximum previous value the number 1. The process finishes when an overconstrained center is found, namely, a rotation center that can be determined by using more than two pairs of already-known IRCs that yield independent equations. Simplifying the resulting system of equations yields a quadratic or cubic equation in . The roots of the equation determine the possible locations of the secondary center.
- Step 6.
- Set the counter . Steps 5.1 to 5.3 must be repeated with a new secondary center that can be expressed as a linear combination of two primary centers. The process eventually yields an overconstrained secondary center, whose location can be obtained through a system of equations that yields a quadratic or cubic equation in . The roots of the equation determine the possible locations of the secondary center.
- Step 7.
- The correct location of the secondary center, obtained through the values of and , is determined by choosing the location of a secondary center common to the two processes outlined in the two previous paragraphs. In the process, the location of many other secondary IRCs, usually all, are also found.
3.2. Determination and Solution of the System of Equations
3.2.1. Selection of a First Arbitrary Center and Determination of an Overconstrained Center



3.2.2. Selection of a Second Arbitrary Center and Determination of an Overconstrained Center



4. Second Case Study: Eight-Bar “Double-Butterfly” Planar Linkage
4.1. Determination of the Secondary Rotation Axes
4.1.1. Selection of a First Arbitrary Center and Determination of an Overconstrained Center



4.1.2. Selection of a Second Arbitrary Center and Determination of an Overconstrained Center







5. Proof of the Method
- The single-butterfly linkage has nine primary centers. Two additional centers can be obtained by a straightforward application of the Aronhold–Kennedy theorem, , and . During the two-step process, the location of the following IRCs, , , , , , , and , are found. Hence, after the process, the users will know the location of 18 out of 28 centers.
- The double-butterfly has 10 primary centers. During the two-step process, the location of the following IRCs, , , , , , , , , and , are found. Hence, after the process, the users will know the location of 19 out of 28 centers.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Secondary Rotation Axis as a Linear Combination of Two Primary Rotation Centers


References
- Aronhold, S. Gründzuge der Kinematischen Geometrie. Verh. Ver. Z. Beförderung des Gewerbefleiss Preuss. 1872, 51, 129–155. [Google Scholar]
- Kennedy, A.B.W. The Mechanics of Machinery; Macmillan: London, UK, 1886; pp. 60–83. [Google Scholar]
- Shigley, J.E.; Uicker, J.J., Jr. Theory of Machines and Mechanisms; McGraw-Hill Inc.: Singapore, 1980. [Google Scholar]
- Klein, A.W. Kinematics of Machinery; Mc-Graw Hill Book Co.: New York, NY, USA, 1917. [Google Scholar]
- Modrey, J. Analysis of Complex Kinematic Chains with Influence Coefficients. J. Appl. Mech. 1959, 26, 184–188. [Google Scholar] [CrossRef]
- Goodman, T.P. Discussion to the paper Analysis of Complex Kinematic Chains with Influence Coefficients. J. Appl. Mech. 1960, 27, 215–216. [Google Scholar] [CrossRef] [Green Version]
- Yan, H.S.; Hsu, M.H. An Analytical Method for Locating Instantaneous Velocity Centers. In DE-Vol.47 Flexible Mechanisms, Dynamics and Analysis, Proceedings of the ASME 1992 Design Technical Conferences, 22nd Biennial Mechanisms Conference, Scottsdale, AZ, USA, 13–16 September 1992; Kinzel, G., Reinholtz, C., Eds.; ASME: New York, NY, USA, 1992; pp. 353–359. [Google Scholar]
- Kim, M.; Han, M.S.; Seo, T.; Lee, J.W. A new instantaneous centers analysis methodology for planar closed chains via graphical representation. Int. J. Control Autom. Syst. 2016, 14, 1528–1534. [Google Scholar] [CrossRef]
- Valderrama-Rodríguez, J.I.; Rico, J.M.; Cervantes-Sánchez, J.J. A general method for the determination of the instantaneous screw axes of one-degree-of-freedom spatial mechanisms. Mech. Sci. 2020, 11, 91–99. [Google Scholar] [CrossRef]
- Di Gregorio, R. A novel method for the singularity analysis of planar mechanisms with more than one degree of freedom. Mech. Mach. Theory 2009, 44, 83–102. [Google Scholar] [CrossRef]
- Zarkandi, S. Application of mechanical advantage and instant centers on singularity analysis of single-DOF planar mechanisms. Trans. Mech. Eng. Div. Inst. Eng. Bangladesh 2010, 41, 50–57. [Google Scholar] [CrossRef] [Green Version]
- Foster, D.E.; Pennock, G.R. Graphical methods to locate the secondary instant centers of single-degree-of-freedom indeterminate linkages. J. Mech. Des. 2003, 125, 268–274. [Google Scholar] [CrossRef]
- Di Gregorio, R. An algorithm for analytically calculating the positions of the secondary instant centers of indeterminate linkages. J. Mech. Des. 2008, 130, 1–9. [Google Scholar] [CrossRef]
- Kung, C.M.; Wang, L.C.T. Analytical method for locating the secondary instant centers of indeterminate planar linkages. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2009, 223, 491–502. [Google Scholar] [CrossRef]
- Chang, Y.P.; Her, C. Locating instant centers of kinematically indeterminate linkages. J. Mech. Des. 2008, 130, 062304. [Google Scholar] [CrossRef]
- Liu, Z.; Chang, Y.P. The virtual cam method application and verification on locating key instant centers of ten-bars 1-DOF indeterminate linkages. In Proceedings of the ASME 2017 International Mechanical Engineering Congress and Exposition, Tampa, FL, USA, 3–9 November 2017; ASME: New York, NY, USA, 2017. [Google Scholar]
- Liu, Z.; Chang, Y.P. The virtual cam-hexagon method authentication on locating key instant centers of all planar single degree of freedom kinematically indeterminate linkages up to ten-bar. In Proceedings of the ASME 2019 International Mechanical Engineering Congress and Exposition, Pittsburgh, PA, USA, 9–15 November 2017; ASME: New York, NY, USA, 2017. [Google Scholar]
- Valderrama-Rodríguez, J.I.; Rico, J.M.; Cervantes-Sánchez, J.J. A screw theory approach to compute instantaneous rotation axes of indeterminate spherical linkages. Mech. Based Des. Struct. Mach. 2020, 1–41. [Google Scholar] [CrossRef]
- Ball, R.S. A Treatise on the Theory of Screws; Cambridge University Press: Cambridge, UK, 1900. [Google Scholar]
- Rico, J.M.; Gallardo-Alvarado, J.; Duffy, J. Screw theory and higher order kinematic analysis of open serial and closed chains. Mech. Mach. Theory 1999, 34, 559–586. [Google Scholar] [CrossRef]
- Brand, L. Vector and Tensor Analysis; John Wiley and Sons: New York, NY, USA, 1947. [Google Scholar]
- Rico, J.M.; Duffy, J. Orthogonal spaces and screw systems. Mech. Mach. Theory 1992, 27, 451–458. [Google Scholar] [CrossRef]
- Zhang, L.; Zhao, Y.; Ren, J. Screw rolling between moving and fixed axodes traced by lower-mobility parallel mechanism. Mech. Mach. Theory 2021, 163, 104354. [Google Scholar] [CrossRef]
- Valderrama-Rodríguez, J.I. Localización de los Ejes de Tornillos Instantáneos de Mecanismos Espaciales y sus Aplicaciones. Master’s Thesis, Universidad de Guanajuato, Guanajuato, Mexico, December 2018. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Valderrama-Rodríguez, J.I.; Rico, J.M.; Cervantes-Sánchez, J.J.; García-García, R. A Screw Theory Approach to Computing the Instantaneous Rotation Centers of Indeterminate Planar Linkages. Robotics 2022, 11, 6. https://doi.org/10.3390/robotics11010006
Valderrama-Rodríguez JI, Rico JM, Cervantes-Sánchez JJ, García-García R. A Screw Theory Approach to Computing the Instantaneous Rotation Centers of Indeterminate Planar Linkages. Robotics. 2022; 11(1):6. https://doi.org/10.3390/robotics11010006
Chicago/Turabian StyleValderrama-Rodríguez, Juan Ignacio, José M. Rico, J. Jesús Cervantes-Sánchez, and Ricardo García-García. 2022. "A Screw Theory Approach to Computing the Instantaneous Rotation Centers of Indeterminate Planar Linkages" Robotics 11, no. 1: 6. https://doi.org/10.3390/robotics11010006