
Reuleaux Triangle–Based Two Degrees of Freedom Bipedal Robot


Abstract
:1. Introduction
- (1)
- A novel single DOF leg mechanism that utilizes the Reuleaux triangle cam-follower mechanism to achieve constant body height during locomotion is proposed.
- (2)
- The mechanical design, kinematic analysis, dynamic modeling, prototyping, and experiments of a novel bipedal robot based on the novel leg mechanism are carried out, in order to verify the proposed leg mechanism.
2. Robotic Modular Leg—V2
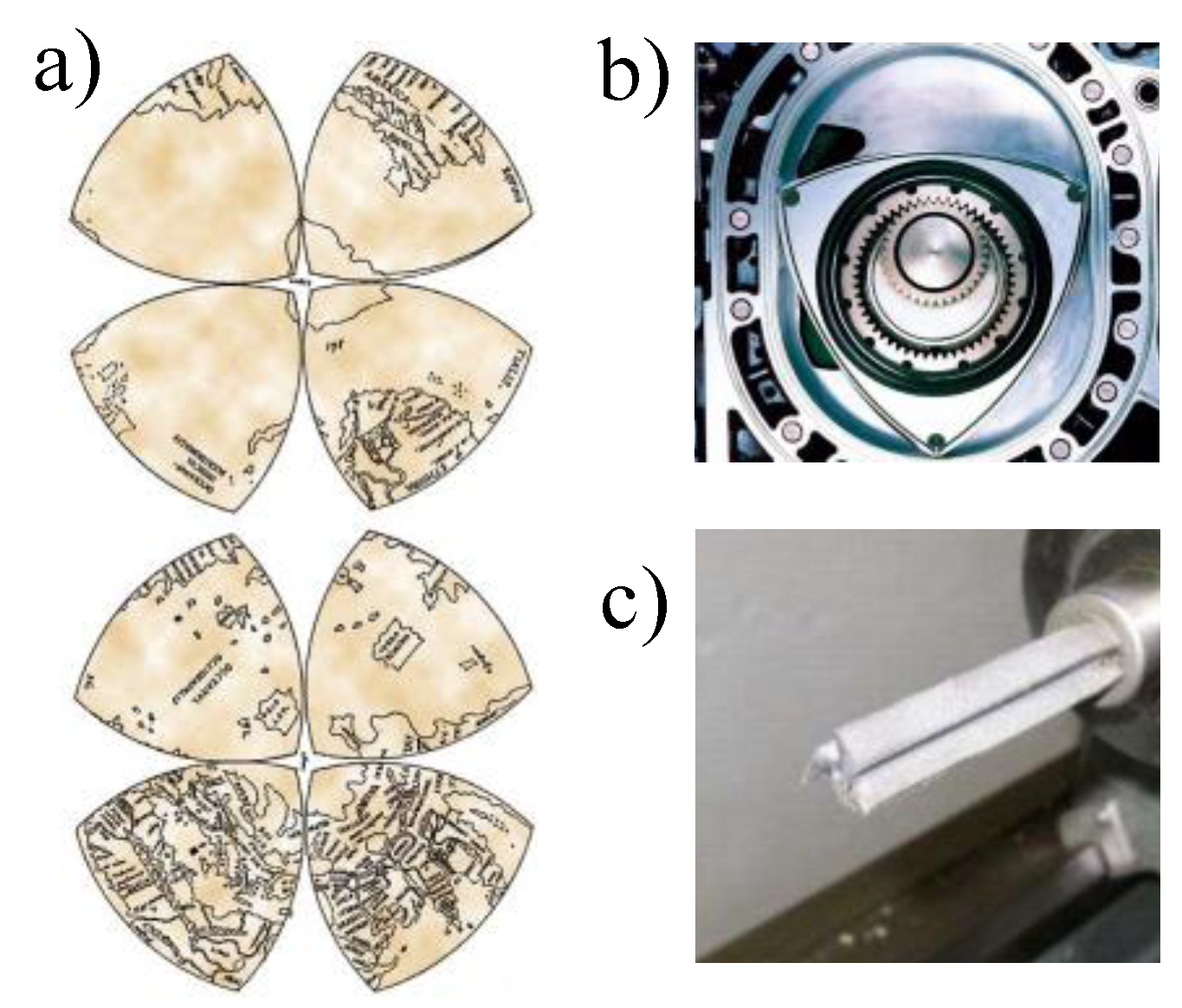
2.1. Reuleaux Triangle Background
2.2. Kinematic Analysis
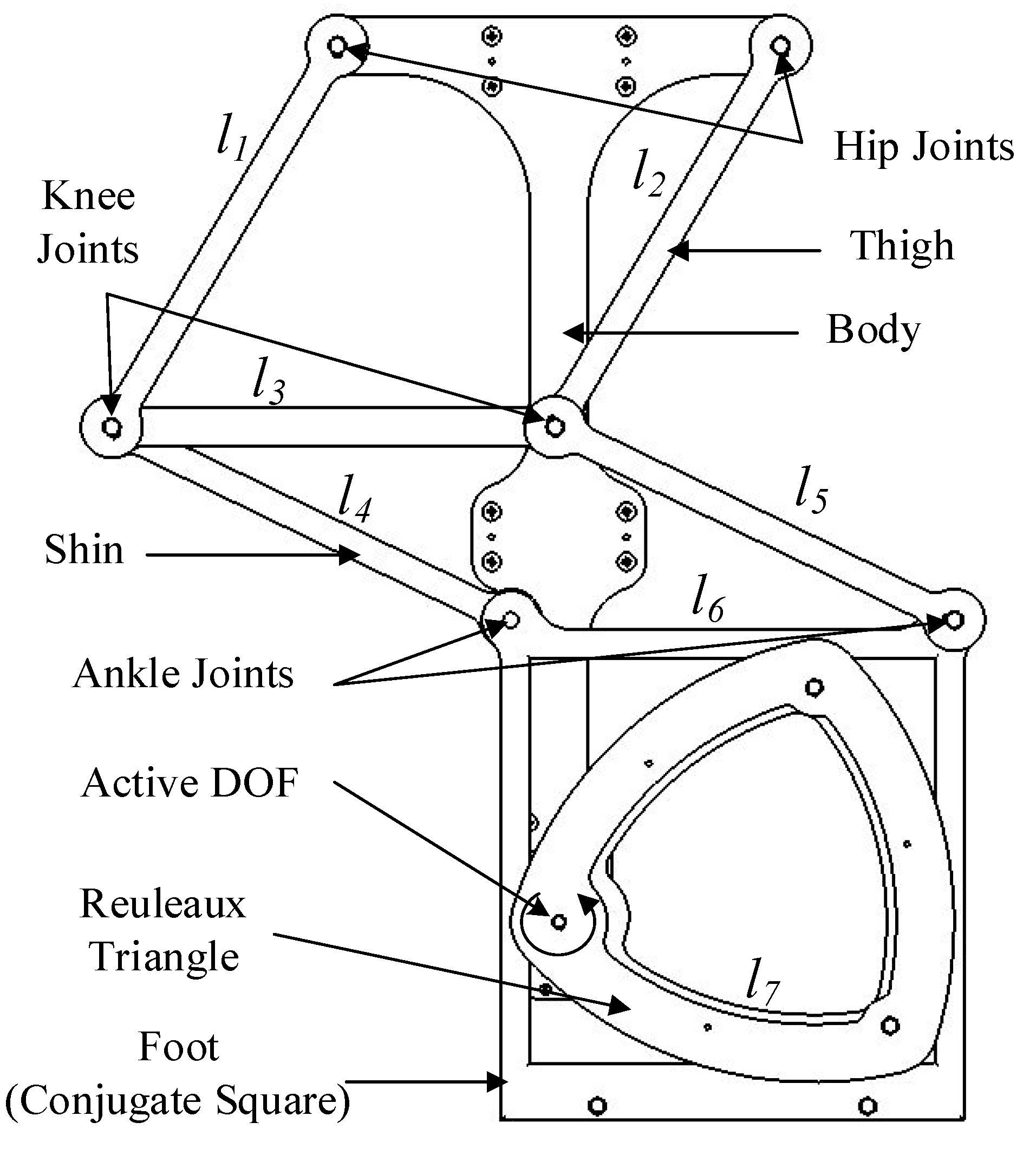
2.3. Mechanical Design
3. Foot Trajectory Planning
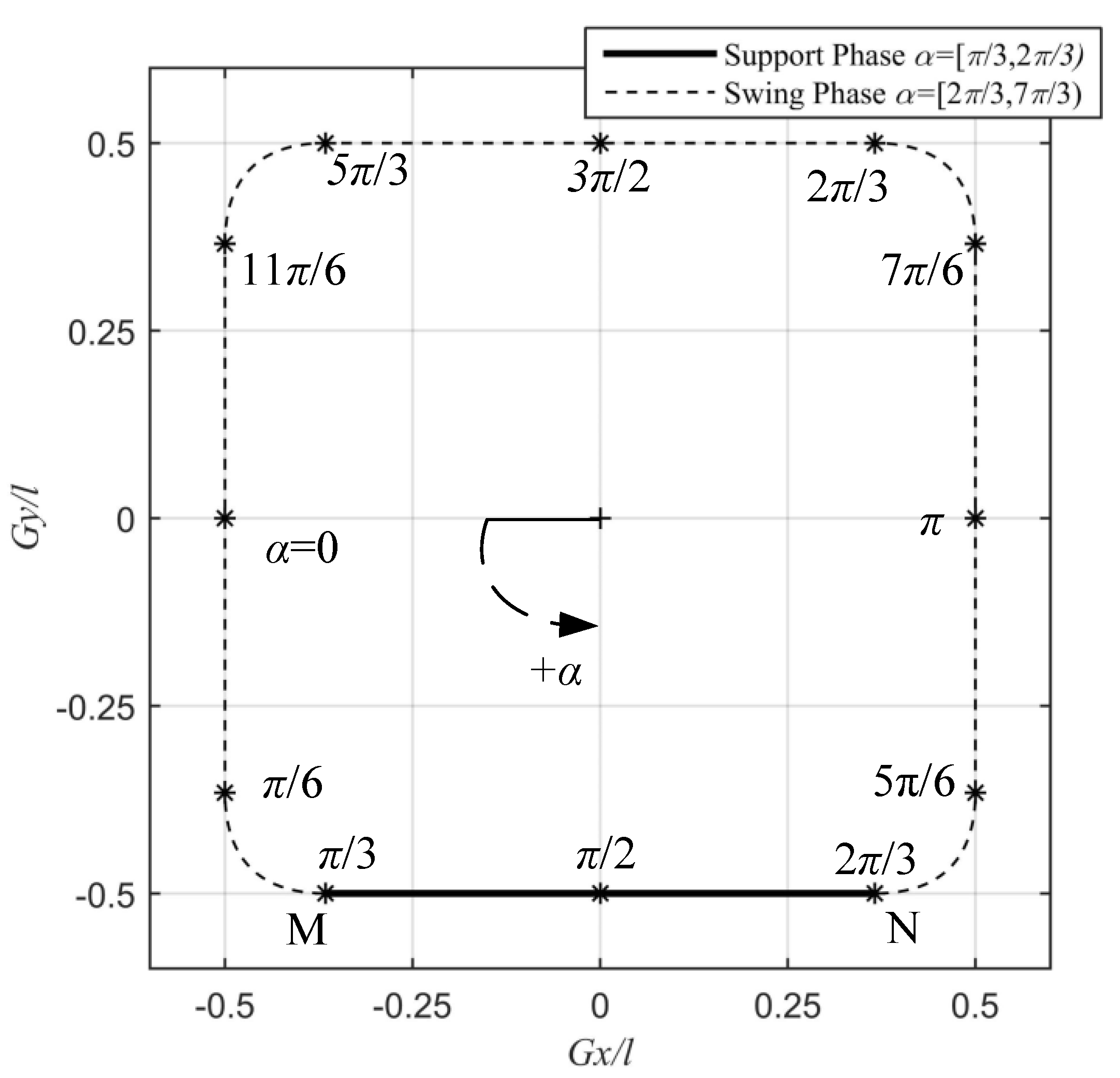
3.1. Single Leg Foot Trajectory Planning
3.2. Gait Sequencing for Bipedal Locomotion
4. Dynamic Analysis of the Robotic System
5. Experimental Results
5.1. Robot Prototype
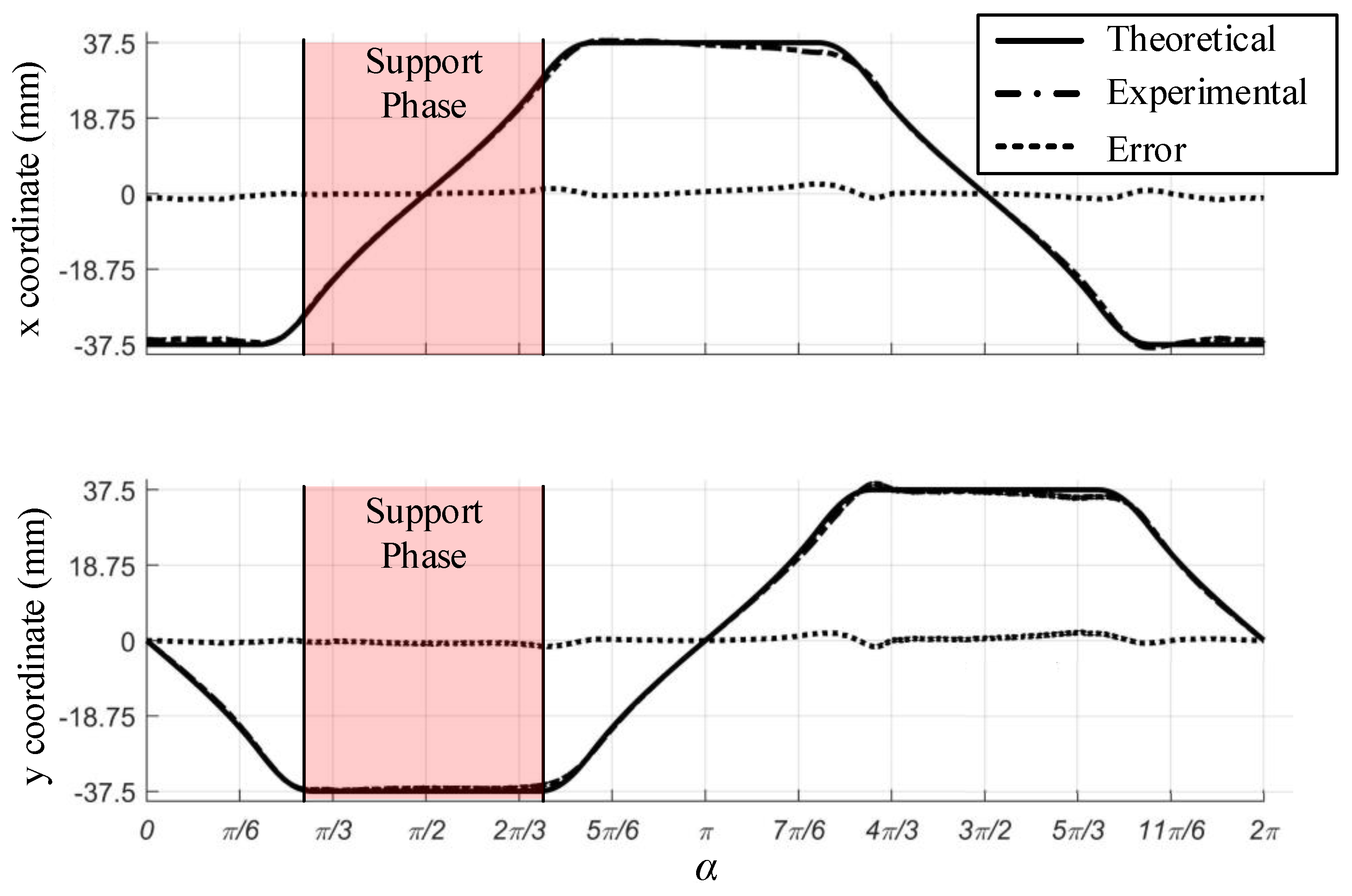
5.2. Indoor Walking
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Silva, M.F.; MacHado, J.A.T. A historical perspective of legged robots. J. Vib. Control 2007, 13, 1447–1486. [Google Scholar] [CrossRef] [Green Version]
- Hutter, M.; Gehring, C.; Jud, D.; Lauber, A.; Bellicoso, C.D.; Tsounis, V.; Hwangbo, J.; Bodie, K.; Fankhauser, P.; Bloesch, M.; et al. ANYmal—A highly mobile and dynamic quadrupedal robot. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Daejeon, Korea, 9–14 October 2016. [Google Scholar]
- Seok, S.; Wang, A.; Chuah, M.Y.; Hyun, D.J.; Lee, J.; Otten, D.M.; Lang, J.H.; Kim, S. Design principles for energy-efficient legged locomotion and implementation on the MIT cheetah robot. IEEE/ASME Trans. Mechatron. 2014, 20, 1117–1129. [Google Scholar] [CrossRef] [Green Version]
- Katz, B.; Di Carlo, J.; Kim, S. Mini cheetah: A platform for pushing the limits of dynamic quadruped control. In Proceedings of the International Conference on Robotics and Automation, Montreal, QC, Canada, 20–24 May 2019. [Google Scholar]
- Waldron, K.J.; McGhee, R.B. The adaptive suspension vehicle. IEEE Control Syst. Mag. 1986, 6, 7–12. [Google Scholar] [CrossRef]
- Hubicki, C.; Grimes, J.; Jones, M.; Renjewski, D.; Spröwitz, A.; Abate, A.; Hurst, J. ATRIAS: Design and validation of a tether-free 3D-capable spring-mass bipedal robot. Int. J. Robot. Res. 2016, 35, 1497–1521. [Google Scholar] [CrossRef]
- Semini, C.; Tsagarakis, N.G.; Vanderborght, B.; Yang, Y.; Caldwell, D.G. HyQ-hydraulically actuated quadruped robot: Hopping leg prototype. In Proceedings of the 2nd Biennial IEEE/RAS-EMBS International Conference on Biomedical Robotics and Biomechatronics, Scottsdale, AZ, USA, 19–22 October 2008. [Google Scholar]
- Kaneko, M.; Abe, M.; Tanie, K.; Tachi, S.; Nishizawa, S. Basic experiments on a hexapod walking machine (MELWALK-III) with an approximate straight-line link mechanism. In Proceedings of the International Conference on Advanced Robotics, St. Louis, MO, USA, 9–10 September 1985. [Google Scholar]
- Nelson, G.M.; Quinn, R.D. Posture control of a cockroach-like robot. IEEE Control Syst. Mag. 1999, 19, 9–14. [Google Scholar]
- Wang, S.; Chen, Z.; Li, J.; Wang, J.; Li, J.; Zhao, J. Flexible motion framework of the six wheel-legged robot: Experimental results. IEEE/ASME Trans. Mechatron. 2021, in press. [Google Scholar] [CrossRef]
- Schwab, A.L.; Wisse, M. Basin of attraction of the simplest walking model. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Pittsburgh, PA, USA, 9–12 September 2001. [Google Scholar]
- Galvez, J.A.; Estremera, J.; De Santos, P.G. A new legged-robot configuration for research in force distribution. Mechatronics 2003, 13, 907–932. [Google Scholar] [CrossRef]
- Torige, A.; Noguchi, M.; Ishizawa, N. Centipede type multi-legged walking robot. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Yokohama, Japan, 26–30 July 1993. [Google Scholar]
- Hoffman, K.L.; Wood, R.J. Passive undulatory gaits enhance walking in a myriapod millirobot. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011. [Google Scholar]
- Saranli, U.; Buehler, M.; Koditschek, D.E. RHex: A simple and highly mobile hexapod robot. Int. J. Robot. Res. 2001, 20, 616–631. [Google Scholar] [CrossRef] [Green Version]
- Yoneda, K.; Ota, Y.; Ito, F.; Hirose, S. Construction of a quadruped with reduced degrees of freedom. In Proceedings of the Industrial Electronics Conference, Nagoya, Japan, 22–28 October 2000. [Google Scholar]
- Funabshi, H.; Ogawa, K.; Gotoh, Y.; Kojima, F. Synthesis of leg-mechanisms of biped walking machines: Part i, synthesis of ankle-path-generator. Bull. JSME 2011, 28, 537–543. [Google Scholar] [CrossRef]
- Liang, C.; Ceccarelli, M.; Takeda, Y. Operation analysis of a one-dof pantograph leg mechanisms. In Proceedings of the 17th International Workshop on Robotics in Alpe-Adria-Danube Region, Ancona, Italy, 15–17 September 2008. [Google Scholar]
- Tavolieri, C.; Ottaviano, E.; Ceccarelli, M.; Di Rienzo, A. Analysis and design of a 1-dof leg for walking machines. Proc. RAAD 2006, 6, 63–71. [Google Scholar]
- Liu, Y.; Ben-Tzvi, P. An articulated closed kinematic chain planar robotic leg for high-speed locomotion. J. Mech. Robot. 2020, 12, 041003–041018. [Google Scholar] [CrossRef]
- Park, J.; Kim, K.S.; Kim, S. Design of a cat-inspired robotic leg for fast running. Adv. Robot. 2014, 28, 1587–1598. [Google Scholar] [CrossRef]
- Adachi, H.; Koyachi, N.; Nakano, E. Mechanism and control of a quadruped walking robot. IEEE Control Syst. Mag. 1988, 8, 14–19. [Google Scholar] [CrossRef]
- Ch, L.E.; Pop, C.; Pop, F.; Dolga, V. Novel solution for leg motion with 5-link belt mechanism. Int. J. Appl. Mech. Eng. 2014, 19, 699–708. [Google Scholar] [CrossRef] [Green Version]
- Saab, W.; Ben-Tzvi, P. Design and analysis of a robotic modular leg mechanism. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Charlotte, NC, USA, 21–24 August 2016. [Google Scholar]
- Saab, W.; Rone, W.; Ben-Tzvi, P. Robotic modular leg: Design, analysis, and experimentation. J. Mech. Robot. 2017, 9, 024501–024506. [Google Scholar] [CrossRef]
- Rone, W.S.; Saab, W.; Kumar, A.; Ben-Tzvi, P. Controller Design, Analysis, and Experimental Validation of a Robotic Serpentine Tail to Maneuver and Stabilize a Quadrupedal Robot. J. Dyn. Syst. Meas. Control 2019, 141, 081002. [Google Scholar] [CrossRef] [Green Version]
- Libby, T.; Johnson, A.M.; Chang-Siu, E.; Full, R.J.; Koditschek, D.E. Comparative design, scaling, and control of appendages for inertial reorientation. IEEE Trans. Robot. 2016, 32, 1380–1398. [Google Scholar] [CrossRef]
- Kaneko, M.; Abe, M.; Tachi, S.; Nishizawa, S.; Tanie, K.; Komoriya, K. Legged locomotion machine based on the consideration of degrees of freedom. Theory Pract. Robot. Manip. 2012, 403–410. [Google Scholar] [CrossRef]
- Sun, Q.; Wang, C.; Zhao, D.; Zhang, C. Cam drive step mechanism of a quadruped robot. J. Robot. 2014, 2014, 851680. [Google Scholar] [CrossRef] [Green Version]
- Yang, J.; Saab, W.; Ben-Tzvi, P. A two-dof bipedal robot utilizing the reuleaux triangle drive mechanism. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Macau, China, 3–8 November 2019. [Google Scholar]
- Bower, D.I. The unusual projection for one of john dee’s maps of 1580. Cartogr. J. 2012, 49, 55–61. [Google Scholar] [CrossRef]
- Reuleaux, F. Kinematics of Machinery: Outlines of a Theory of Machines; Dover Publications Inc.: New York, NY, USA, 1963. [Google Scholar]
- Watts, H.J. Drill or Boring Member. U.S. Patent 1,241,176, 25 September 1917. [Google Scholar]
- Figliolini, G.; Rea, P.; Grande, S. Higher-pair reuleaux-triangle in square and its derived mechanisms. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Chicago, IL, USA, 12–15 August 2012. [Google Scholar]
- Featherstone, R. Rigid Body Dynamics Algorithms; Springer: Berlin, Germany, 2014. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rotation Angle | |||
|---|---|---|---|
| Inside the square | |||
| Inside the square | |||
| Inside the square |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, J.; Saab, W.; Liu, Y.; Ben-Tzvi, P. Reuleaux Triangle–Based Two Degrees of Freedom Bipedal Robot. Robotics 2021, 10, 114. https://doi.org/10.3390/robotics10040114
Yang J, Saab W, Liu Y, Ben-Tzvi P. Reuleaux Triangle–Based Two Degrees of Freedom Bipedal Robot. Robotics. 2021; 10(4):114. https://doi.org/10.3390/robotics10040114
Chicago/Turabian StyleYang, Jiteng, Wael Saab, Yujiong Liu, and Pinhas Ben-Tzvi. 2021. "Reuleaux Triangle–Based Two Degrees of Freedom Bipedal Robot" Robotics 10, no. 4: 114. https://doi.org/10.3390/robotics10040114