Advances in Agriculture Robotics: A State-of-the-Art Review and Challenges Ahead




Abstract
:
1. Introduction
1.1. Global Socio-Economic Challenges in Times of the Pandemic
1.2. Precision Agriculture
2. Materials and Methods
3. Robotic Applications in Agriculture
3.1. Robotic Applications in Agriculture for Land Preparation before Planting
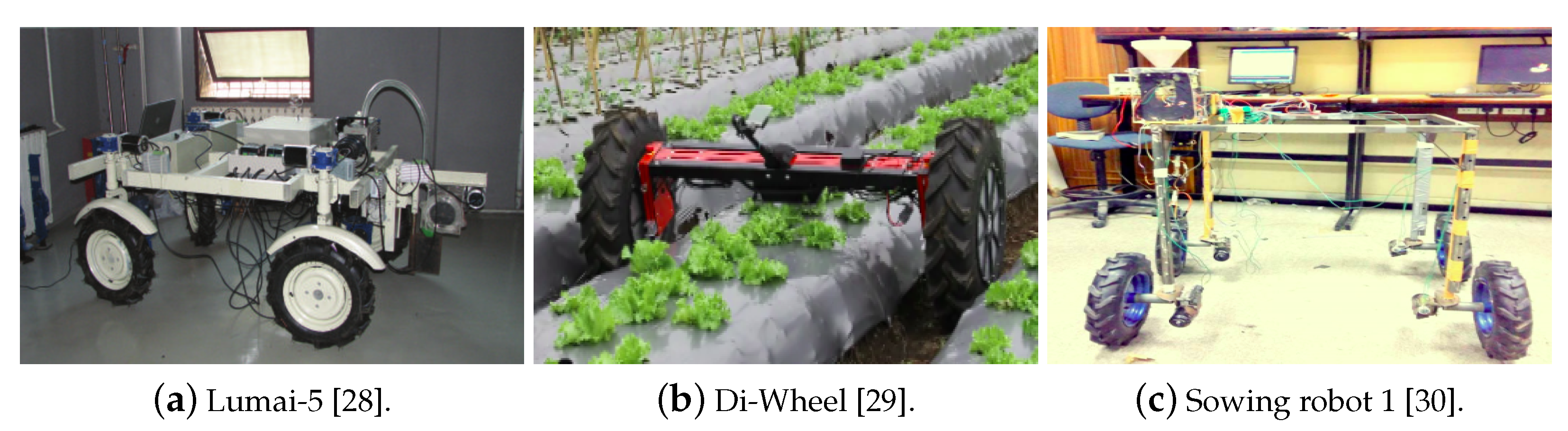
3.2. Robotic Applications in Agriculture for Sowing and Planting
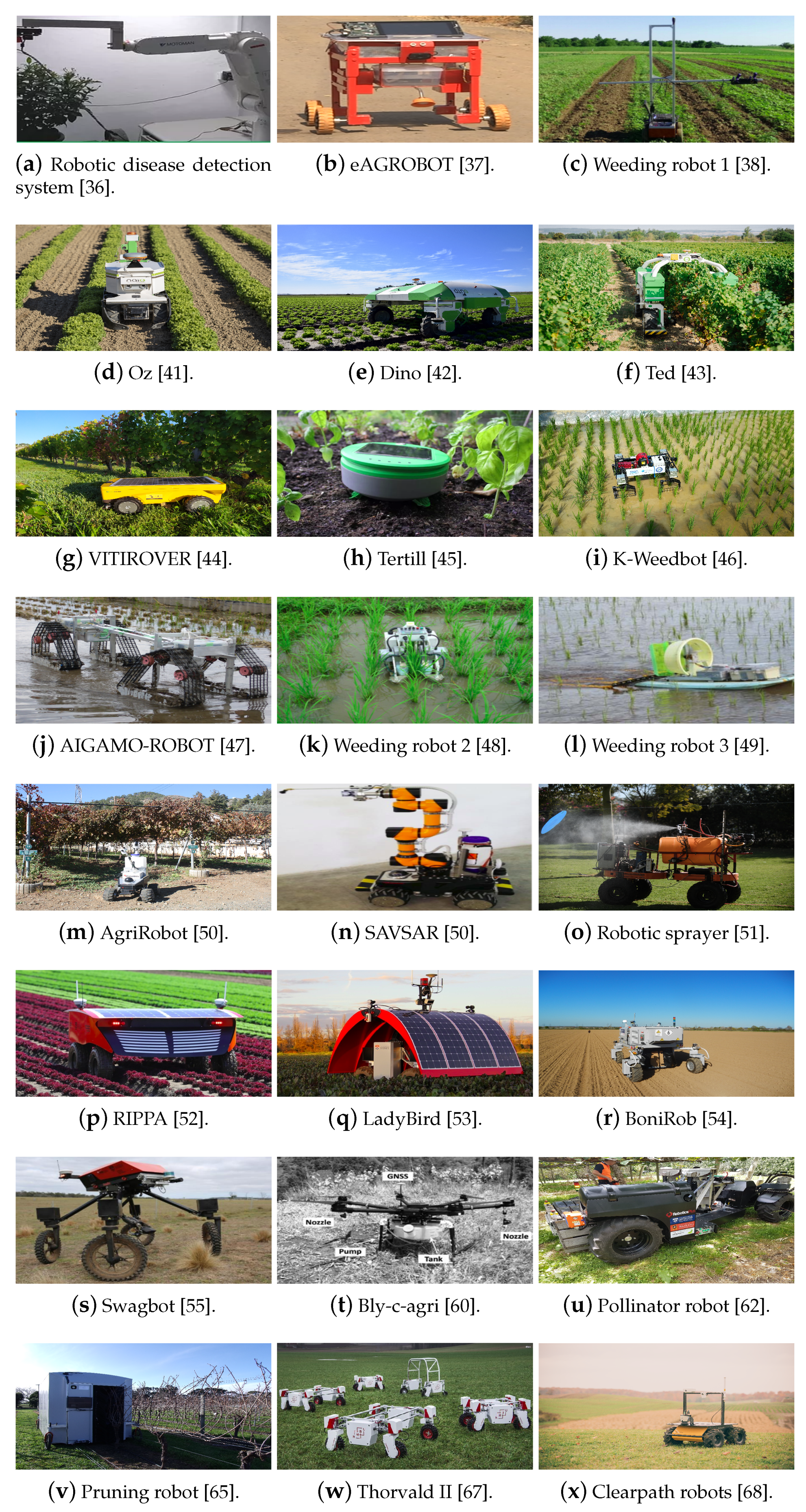
3.3. Robotic Applications in Agriculture for Plant Treatment
- Mechanical weeding: Several works, both in the research phase and commercially available, use mechanical tools to remove weeds, eliminating the application of herbicidal products of high financial value and allowing the cultivation of organic products. As previously described, with the use of a low-cost robot, researchers Sori et al. [48] report the various benefits generated by the mechanical removal of weeds;
- Chemical weeding: Most robots that perform this task have a specific computer vision technique/algorithm to reduce expenses with over spraying. Vegetation indices such as ExG-ExR and NDVI were used to extract the crop characteristics and perform its subsequent classification. After its proper classification, the specific spray system applies the herbicide to the weed. Therefore, the same spraying system for herbicidal products can be used for the precise application of fertilizers on plants classified as having a low health value [52,53];
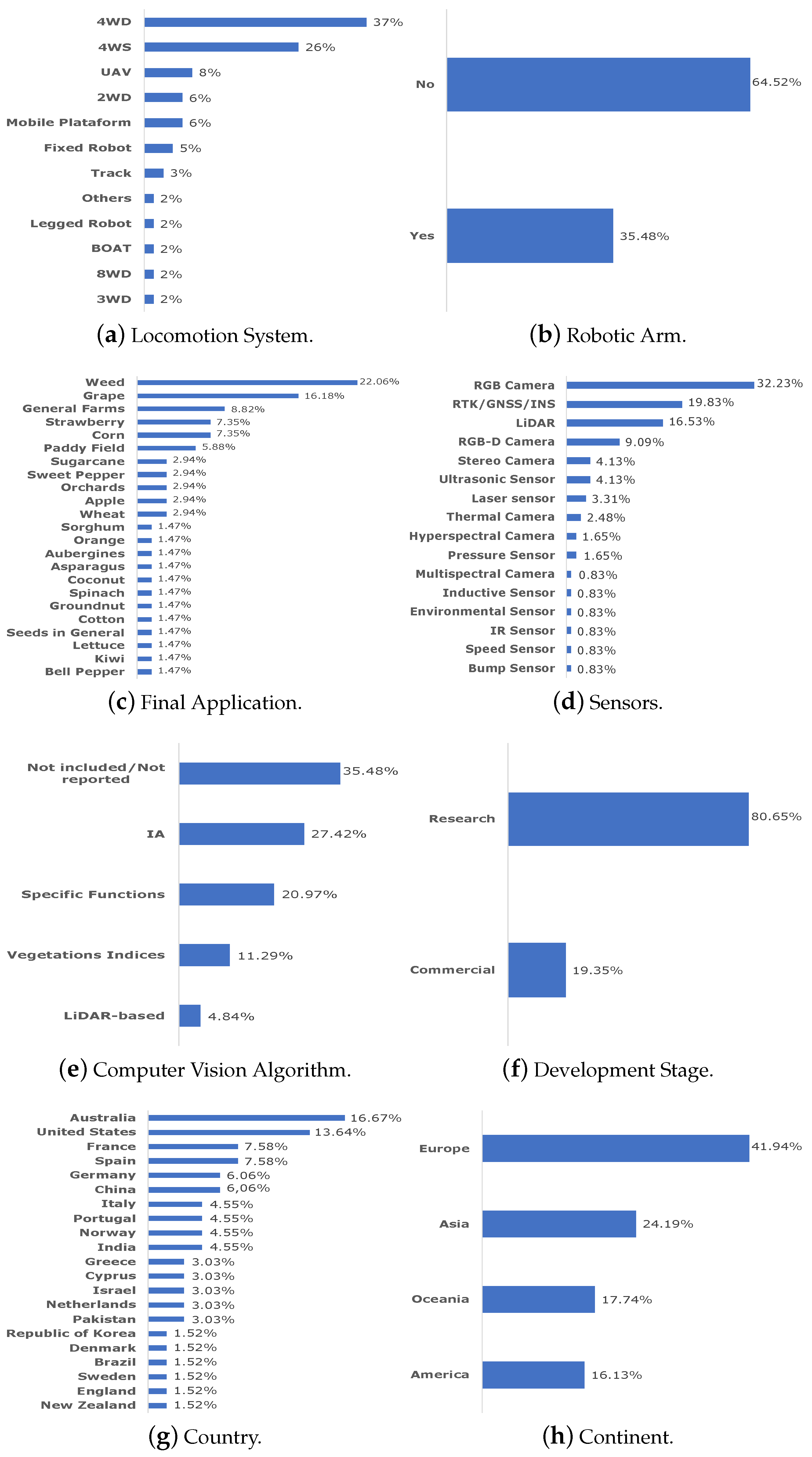
- General tasks: As seen in the column “Locomotion Systems” in Table 3, the robots used have terrestrial (4WD, 4WS, track), aerial (hexacopter, octocopter) and marine (boat) systems for locomotion. Not only to avoid the re-creation of existing systems but also to speed up the transition process from research to the commercial stage, Swagbot platforms, Thorvald II, Clearpath and AgroBot were developed for use in carrying out different tasks and in different agricultural environments.
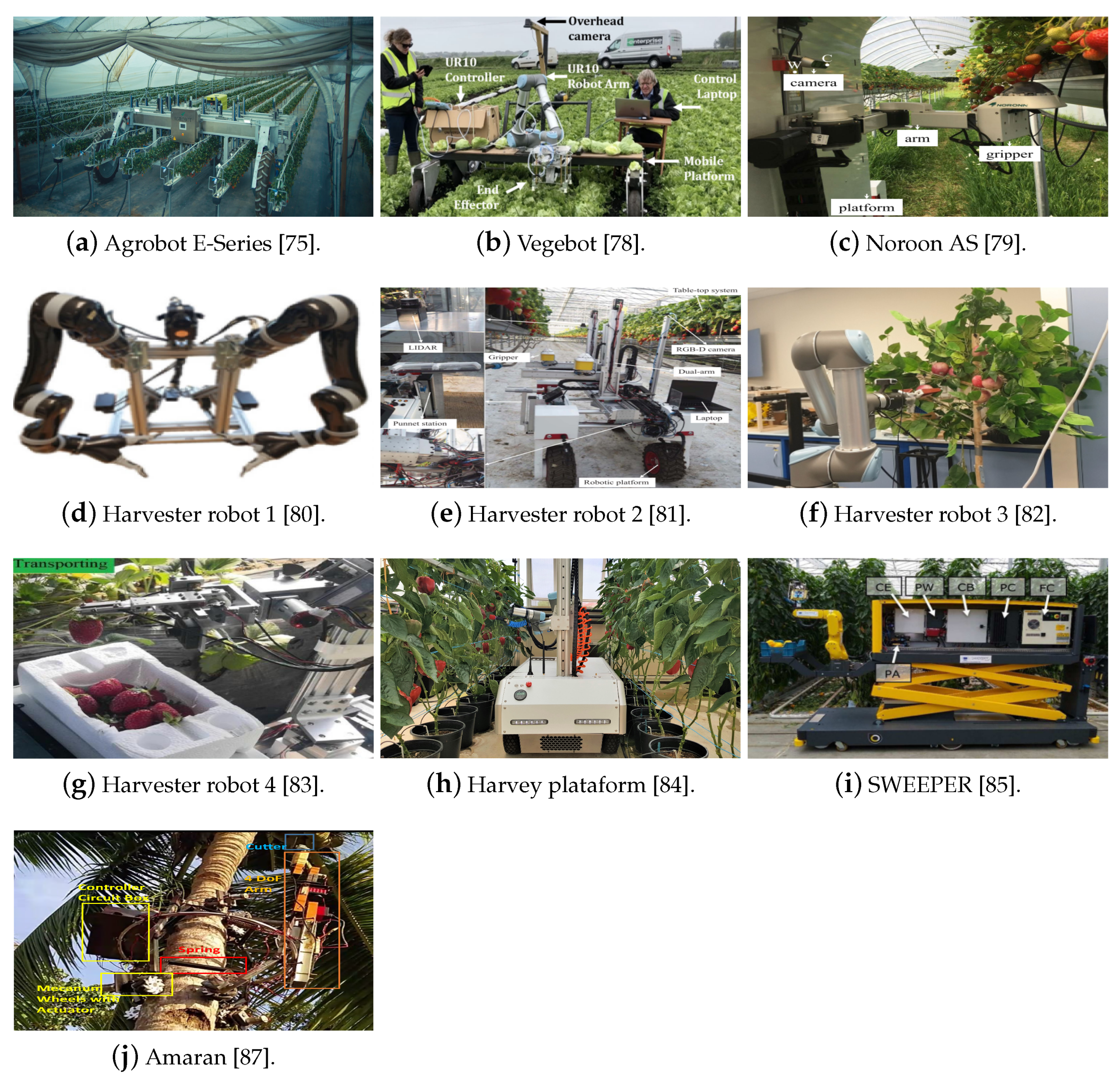
3.4. Robotic Applications in Agriculture for Harvesting
- Challenges: Despite the constant technological advances, the fruit occlusions and the changes in ambient lighting are still challenges that merit further scientific studies and work to enable the use of robots in agricultural environments;
- Simplicity and efficiency: In addition to the challenges of occlusion and changes in ambient lighting, the simplicity of construction and efficiency of the robotic system are two factors that allow to streamline the commercialization process. The system efficiency is directly related to the computer vision algorithms used and, in this sense, the improvement of such algorithms will increase the efficiency of the robotic system as a whole. To the authors knowledge, only the Agrobot E-Series and Berry 5 robots in Table 4 are in the commercialization phase;
- Evolution between 2014–2021: As previously described, Bac et al. [18] carried out a detailed study of 30 years of evolution (1984–2014) on harvesting robots. Thus, are compared the values (average; minimum–maximum) of his work with the analyzes of the present work (which vary from 2013–2021). Bac et al. reached the following values: harvest success rate (66%; 40–86%) and cycle time (33 s; 1–227 s) and this work found the following values: harvest success rate (81.17%; 50–100%) and cycle time (18.88 s; 2–36.9 s)—the cycle time of the Amaran robot was disregarded, as it is dependent on the skills of the operator. Thus, in general aspects, there is a 22.98% increase in the average harvest success rate and a 42.78% reduction in the average cycle time value, indicating an evolution in the performance of the harvesting robots.
3.5. Robotic Applications in Agriculture for Yield Estimation and Phenotyping
- Sensors: The micro observation of the biological phenomena of each plant, whether for yield estimation or phenotyping, requires specific and highly reliable sensors, from fluorescence level detection sensors, multispectral, Near-Infrared (NIR), IR, environmental to RGB cameras;
- SLAM: Whether due to physical dimensions, power supply requirements or vegetation height, the unavailability of systems based on GNSS devices induces the improvement of SLAM techniques. Thus, to improve navigation in these conditions, robots use both natural characteristics (such as the generation of trajectories based on the average distance between rows and the direction of the airflow) and artificial ones (such as the use of RFID tags and wireless sensors). Several SLAM algorithms and path planning techniques for agricultural and forestry robots are described in detail in [106,107,108];
- Artificial intelligence: Based on the specific characteristics of each crop, vegetation indices (such as NDVI and Chlorophyll-based fluorescence) and artificial intelligence algorithms (such as MLP, CNN and SVM) can be used. Therefore, one must seek to establish a balance between the computational complexity level of the proposed approach with the expected efficiency/result.
4. Discussion
4.1. Agricultural Robots
4.2. Unsolved Issues
4.2.1. Locomotion Systems
4.2.2. Sensors
4.2.3. Computer Vision Algorithms
4.2.4. IoT-Based Smart Agriculture
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- United Nations. World Population Projected to Reach 9.8 Billion in 2050. Available online: https://www.un.org/development/desa/en/news/population/world-population-prospects-2017.html (accessed on 8 March 2021).
- Zhang, X.; Davidson, E.A. Improving Nitrogen and Water Management in Crop Production on a National Scale. AGU Fall Meeting Abstracts. 2018, Volume 1, pp. 1–2. Available online: https://ui.adsabs.harvard.edu/abs/2018AGUFM.B22B..01Z/abstract (accessed on 1 March 2021).
- Ayaz, M.; Ammad-Uddin, M.; Sharif, Z.; Mansour, A.; Aggoune, E.M. Internet of Things (IoT) Based Smart Agriculture: Toward Making the Fields Talk. IEEE Access 2019, 1. [Google Scholar] [CrossRef]
- United Nations. World Urbanization Prospects: The 2018 Revision. Econ. Soc. Aff. 2018, 1, 1–2. [Google Scholar]
- Zhang, L.; Dabipi, I.K.; Brown, W.L., Jr. Internet of Things Applications for Agriculture; John Wiley & Sons, Ltd: Hoboken, NJ, USA, 2018; Chapter 18; pp. 507–528. [Google Scholar]
- World Health Organization. WHO Coronavirus Disease (COVID-19) Dashboard. 2020. Available online: https://covid19.who.int/ (accessed on 1 March 2021).
- FAO. Keeping food and agricultural systems alive: Analyses and solutions in response to COVID-19. FAO 2020, 64. [Google Scholar] [CrossRef]
- CFBF. Still Searching for Solutions: Adapting to Farm Worker Scarcity Survey 2019. Available online: https://www.cfbf.com/wp-content/uploads/2019/06/LaborScarcity.pdf (accessed on 1 March 2021).
- McBratney, A.; Whelan, B.; Ancev, T.; Bouma, J. Future Directions of Precision Agriculture. Precis. Agric. 2005, 6, 7–23. [Google Scholar] [CrossRef]
- Lowenberg-DeBoer, J.; Erickson, B. Setting the Record Straight on Precision Agriculture Adoption. Agron. J. 2019, 111, 1552–1569. [Google Scholar] [CrossRef] [Green Version]
- Tarannum, N.; Rhaman, M.K.; Khan, S.A.; Shakil, S.R. A Brief Overview and Systematic Approch for Using Agricultural Robot in Developing Countries. J. Mod. Sci. Technol. 2015, 3, 88–101. [Google Scholar]
- Santesteban, L.G. Precision viticulture and advanced analytics. A short review. Food Chem. 2019, 279, 58–62. [Google Scholar] [CrossRef]
- Zha, J. Artificial Intelligence in Agriculture. J. Phys. Conf. Ser. 2020, 1693, 012058. [Google Scholar] [CrossRef]
- Elijah, O.; Rahman, T.A.; Orikumhi, I.; Leow, C.Y.; Hindia, M.N. An Overview of Internet of Things (IoT) and Data Analytics in Agriculture: Benefits and Challenges. IEEE Int. Things J. 2018, 5, 3758–3773. [Google Scholar] [CrossRef]
- Oliveira, L.F.P.; Silva, M.F.; Moreira, A.P. Agricultural Robotics: A State of the Art Survey. In Proceedings of the 23rd International Conference on Climbing and Walking Robots and the Support Technologies for Mobile Machines (CLAWAR 2020), Moscow, Russian, 24–26 August 2020; pp. 279–286. [Google Scholar] [CrossRef]
- Fountas, S.; Mylonas, N.; Malounas, I.; Rodias, E.; Hellmann Santos, C.; Pekkeriet, E. Agricultural Robotics for Field Operations. Sensors 2020, 20, 2672. [Google Scholar] [CrossRef]
- Shamshiri, R.R.; Weltzien, C.; Hameed, I.A.; Yule, I.J.; Grift, T.E.; Balasundram, S.K.; Pitonakova, L.; Ahmad, D.; Chowdhary, G. Research and development in agricultural robotics: A perspective of digital farming. Int. J. Agric. Biol. Eng. 2018, 11, 1–14. [Google Scholar] [CrossRef]
- Bac, C.W.; Henten, E.J.v.; Hemming, J.; Edan, Y. Harvesting Robots for High-value Crops: State-of-the-art Review and Challenges Ahead. J. Field Robot. 2014, 31. [Google Scholar] [CrossRef]
- Gao, X.; Li, J.; Fan, L.; Zhou, Q.; Yin, K.; Wang, J.; Song, C.; Huang, L.; Wang, Z. Review of Wheeled Mobile Robots’ Navigation Problems and Application Prospects in Agriculture. IEEE Access 2018, 6, 49248–49268. [Google Scholar] [CrossRef]
- Sistler, F. Robotics and intelligent machines in agriculture. IEEE J. Robot. Autom. 1987, 3, 3–6. [Google Scholar] [CrossRef]
- Raussendorf. Fruit Robot. Available online: https://www.raussendorf.de/en/fruit-robot.html (accessed on 1 March 2021).
- Siciliano, B.; Khatib, O. Springer Handbook of Robotics, 2nd ed.; Springer Publishing Company: Cham, Switzerland, 2016. [Google Scholar]
- Khan, N.; Medlock, G.; Graves, S.; Anwar, S. GPS Guided Autonomous Navigation of a Small Agricultural Robot with Automated Fertilizing System; SAE Technical Paper; SAE International: Warrendale PA, USA, 2018; Volume 1, p. 1. [Google Scholar] [CrossRef]
- Precision Makers. GREENBOT. Available online: https://www.precisionmakers.com/en/greenbot-2/ (accessed on 1 March 2021).
- DJI. AGRAS MG-1P SERIES: Innovative Insights. Increased Efficiency. Available online: https://www.dji.com/br/mg-1p (accessed on 8 March 2021).
- Nawaz, M.; Bourrié, G.; Trolard, F. Soil compaction impact and modelling: A review. Agron. Sustain. Dev. 2012, 33. [Google Scholar] [CrossRef] [Green Version]
- Sakaue, O. Development of seeding production robot and automated transplanter system. Jpn. Agric. Res. Q. 1996, 30, 221–226. [Google Scholar]
- Haibo, L.; Dong, S.; Zunmin, L.; Chuijie, Y. Study and Experiment on a Wheat Precision Seeding Robot. J. Robot. 2015, 1, 1–9. [Google Scholar] [CrossRef]
- Sukkarieh, S. Mobile on-farm digital technology for smallholder farmers. In Proceedings of the 2017 Crawford Fund Annual Conference on Transforming Lives and Livelihoods: The Digital Revolution in Agriculture, Canberra, Australia, 7–8 August 2017; p. 9. [Google Scholar]
- Hassan, M.U.; Ullah, M.; Iqbal, J. Towards autonomy in agriculture: Design and prototyping of a robotic vehicle with seed selector. In Proceedings of the 2016 2nd International Conference on Robotics and Artificial Intelligence (ICRAI), Los Angeles, CA, USA, 20–22 April 2016; pp. 37–44. [Google Scholar]
- Srinivasan, N.; Prabhu, P.; Smruthi, S.S.; Sivaraman, N.V.; Gladwin, S.J.; Rajavel, R.; Natarajan, A.R. Design of an autonomous seed planting robot. In Proceedings of the 2016 IEEE Region 10 Humanitarian Technology Conference (R10-HTC), Agra, India, 21–23 December 2016; pp. 1–4. [Google Scholar]
- FAO. Keeping Plant Pests and Diseases at Bay: Experts Focus on Global Measures. Available online: http://www.fao.org/news/story/en/item/280489/icode/ (accessed on 15 February 2021).
- Sinden, J.A.; for Australian Weed Management (Australia), C.R.C. The Economic Impact of Weeds in Australia: Report to the CRC for Australian Weed Management; CRC Weed Management: Adelaide, Australia, 2004; p. 55. [Google Scholar]
- Lee, W.S.; Slaughter, D.C.; Giles, D.K. Robotic Weed Control System for Tomatoes. Precis. Agric. 1999, 1, 95–113. [Google Scholar] [CrossRef]
- Lee, W.S.; Slaughter, D.C. Plant recognition using hardware-based neural network. In Proceedings of the 1998 ASAE Annual International Meeting, Orlando, FL, USA, 12–16 July 1998; pp. 1–14. [Google Scholar]
- Schor, N.; Bechar, A.; Ignat, T.; Dombrovsky, A.; Elad, Y.; Berman, S. Robotic Disease Detection in Greenhouses: Combined Detection of Powdery Mildew and Tomato Spotted Wilt Virus. IEEE Robot. Autom. Lett. 2016, 1, 354–360. [Google Scholar] [CrossRef]
- Pilli, S.K.; Nallathambi, B.; George, S.J.; Diwanji, V. eAGROBOT—A robot for early crop disease detection using image processing. In Proceedings of the 2015 2nd International Conference on Electronics and Communication Systems (ICECS), Coimbatore, India, 26–27 February 2015; pp. 1684–1689. [Google Scholar]
- Gai, J.; Tang, L.; Steward, B.L. Automated crop plant detection based on the fusion of color and depth images for robotic weed control. J. Field Robot. 2020, 37, 35–52. [Google Scholar] [CrossRef]
- Jorgensen, R.; Sorensen, C.; Maagaard, J.; Havn, I.; Jensen, K.; Sogaard, H.; Sorensen, L. HortiBot: A System Design of a Robotic Tool Carrier for High-tech Plant Nursing. CIGR J. Sci. Res. Dev. 2006, IX, 1–13. [Google Scholar]
- McCool, C.; Beattie, J.; Firn, J.; Lehnert, C.; Kulk, J.; Bawden, O.; Russell, R.; Perez, T. Efficacy of Mechanical Weeding Tools: A Study Into Alternative Weed Management Strategies Enabled by Robotics. IEEE Robot. Autom. Lett. 2018, 3, 1184–1190. [Google Scholar] [CrossRef]
- Naio Tecnologies. OZ-Weeding, Transportation and Harvest Assistance Robot. Available online: https://www.naio-technologies.com/wp-content/uploads/2019/04/brochure-OZ-ENGLISH-HD.pdf (accessed on 20 February 2021).
- Naio Tecnologies. Dino-Autonomous Mechanical Weeding Robot. 2020. Available online: https://www.naio-technologies.com/wp-content/uploads/2019/04/brochure-DINO-ENGLISH-HD.pdf (accessed on 20 February 2021).
- Naio Tecnologies. Ted—Multifunctional Straddling Vineyard Robot. 2020. Available online: https://www.naio-technologies.com/wp-content/uploads/2019/04/brochure-TED-ENGLISH-3.pdf (accessed on 20 February 2021).
- VITIROVER Solutions. VITIROVER—A Revolution in Soil Grassing Management. 2020. Available online: https://www.vitirover.fr/en-home (accessed on 23 February 2021).
- Franklin Robotics. Meet Tertill—A Better Way to Weed. 2020. Available online: https://tertill.com/ (accessed on 23 February 2021).
- Choi, K.H.; Han, S.K.; Han, S.H.; Park, K.H.; Kim, K.S.; Kim, S. Morphology-based guidance line extraction for an autonomous weeding robot in paddy fields. Comput. Electron. Agric. 2015, 113, 266–274. [Google Scholar] [CrossRef]
- Mitsui, T.; Kobayashi, T.; Kagiya, T.; Inaba, A.; Ooba, S. Verification of a Weeding Robot “AIGAMO-ROBOT” for Paddy Fields. J. Robot. Mechatron. 2008, 20, 228–233. [Google Scholar] [CrossRef]
- Sori, H.; Inoue, H.; Hatta, H.; Ando, Y. Effect for a Paddy Weeding Robot in Wet Rice Culture. J. Robot. Mechatron. 2018, 30, 198–205. [Google Scholar] [CrossRef]
- Uchida, T.F.; Yamano, T. Development of a remoto control type weeding machine with stirring chains for a paddy field. In Proceedings of the 22nd International Conference on Climbing and Walking Robots and Support Technologies for Mobile Machines (CLAWAR 2019), Kuala Lumpur, Malaysia, 26–28 August 2019; pp. 61–68. [Google Scholar] [CrossRef]
- Adamides, G.; Katsanos, C.; Constantinou, I.; Christou, G.; Xenos, M.; Hadzilacos, T.; Edan, Y. Design and development of a semi-autonomous agricultural vineyard sprayer: Human–robot interaction aspects. J. Field Robot. 2017, 34, 1407–1426. [Google Scholar] [CrossRef]
- Berenstein, R.; Edan, Y. Automatic Adjustable Spraying Device for Site-Specific Agricultural Application. IEEE Trans. Autom. Sci. Eng. 2018, 15, 641–650. [Google Scholar] [CrossRef]
- Bogue, R. Robots poised to revolutionise agriculture. Ind. Robot Int. J. 2016, 43, 450–456. [Google Scholar] [CrossRef]
- Underwood, J.P.; Calleija, M.; Taylor, Z.; Hung, C.; Nieto, J.M.G.; Fitch, R.; Sukkarieh, S. Real-time target detection and steerable spray for vegetable crops. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015. [Google Scholar]
- Wu, X.; Aravecchia, S.; Lottes, P.; Stachniss, C.; Pradalier, C. Robotic weed control using automated weed and crop classification. J. Field Robot. 2020, 37, 322–340. [Google Scholar] [CrossRef] [Green Version]
- Wallace, N.D.; Kong, H.; Hill, A.J.; Sukkarieh, S. Energy Aware Mission Planning for WMRs on Uneven Terrains. IFAC-PapersOnLine 2019, 52, 149–154. [Google Scholar] [CrossRef]
- Turner, D.; Lucieer, A.; Watson, C. Development of an Unmanned Aerial Vehicle (UAV) for Hyper-Resolution Vineyard Mapping Based on Visible, Multispectral and Thermal Imagery. The GEOSS Era: Towards Operational Environmental Monitoring. 2011, Volume 1. Available online: https://www.isprs.org/proceedings/2011/isrse-34/211104015Final00547.pdf (accessed on 26 February 2021).
- Kim, J.; Kim, S.; Ju, C.; Son, H.I. Unmanned Aerial Vehicles in Agriculture: A Review of Perspective of Platform, Control, and Applications. IEEE Access 2019, 7, 105100–105115. [Google Scholar] [CrossRef]
- Sánchez, J.T.; Peña, J.M.; Castro, A.I.; Granados, F.L. Multi-temporal mapping of the vegetation fraction in early-season wheat fields using images from UAV. Comput. Electron. Agric. 2014, 103, 104–113. [Google Scholar] [CrossRef]
- Xiang, H.; Tian, L. Development of a low-cost agricultural remote sensing system based on an autonomous unmanned aerial vehicle (UAV). Biosyst. Eng. 2011, 108, 174–190. [Google Scholar] [CrossRef]
- Sarri, D.; Martelloni, L.; Rimediotti, M.; Lisci, R.; Lombardo, S.; Vieri, M. Testing a multi-rotor unmanned aerial vehicle for spray application in high slope terraced vineyard. J. Agric. Eng. 2019, 50, 38–47. [Google Scholar] [CrossRef]
- Meivel, S.; Dinakaran, K.; Gandhiraj, N.; Srinivasan, M. Remote sensing for UREA Spraying Agricultural (UAV) system. In Proceedings of the 2016 3rd International Conference on Advanced Computing and Communication Systems (ICACCS), Coimbatore, India, 22–23 January 2016; Volume 1, pp. 1–6. [Google Scholar] [CrossRef]
- Williams, H.; Nejati, M.; Hussein, S.; Penhall, N.; Lim, J.Y.; Jones, M.H.; Bell, J.; Ahn, H.S.; Bradley, S.; Schaare, P.; et al. Autonomous pollination of individual kiwifruit flowers: Toward a robotic kiwifruit pollinator. J. Field Robot. 2020, 37, 246–262. [Google Scholar] [CrossRef]
- Verbiest, R.; Ruysen, K.; Vanwalleghem, T.; Demeester, E.; Kellens, K. Automation and robotics in the cultivation of pome fruit: Where do we stand today? J. Field Robot. 2020. [Google Scholar] [CrossRef]
- Karkee, M.; Adhikari, B.; Amatya, S.; Zhang, Q. Identification of pruning branches in tall spindle apple trees for automated pruning. Comput. Electron. Agric. 2014, 103, 127–135. [Google Scholar] [CrossRef]
- Botterill, T.; Paulin, S.; Green, R.; Williams, S.; Lin, J.; Saxton, V.; Mills, S.; Chen, X.; Corbett-Davies, S. A Robot System for Pruning Grape Vines. J. Field Robot. 2017, 34, 1100–1122. [Google Scholar] [CrossRef]
- Majeed, Y.; Karkee, M.; Zhang, Q.; Fu, L.; Whiting, M.D. Development and performance evaluation of a machine vision system and an integrated prototype for automated green shoot thinning in vineyards. J. Field Robot. 2021. [Google Scholar] [CrossRef]
- Grimstad, L.; From, P.J. Thorvald II—A Modular and Re-configurable Agricultural Robot. IFAC-PapersOnLine 2017, 50, 4588–4593. [Google Scholar] [CrossRef]
- Clearpath Robotics. Boldy Go Where No Robot Has Gone before. 2020. Available online: https://clearpathrobotics.com/ (accessed on 25 February 2021).
- Avrora Robotics. Agrobot Project—Automation of Agriculture. 2020. Available online: https://avrora-robotics.com/en/projects/agrobot/ (accessed on 2 March 2021).
- Hayashi, S.; Yamamoto, S.; Saito, S.; Ochiai, Y.; Kamata, J.; Kurita, M.; Yamamoto, K. Field Operation of a Movable Strawberry-harvesting Robot using a Travel Platform. Jpn. Agric. Res. Q. 2014, 48, 307–316. [Google Scholar] [CrossRef] [Green Version]
- ABARES. Australian Vegetable Growing Farms: An Economic Survey, 2012-13 and 2013-14. 2014. Available online: https://data.gov.au/dataset/ds-dga-a00deb73-3fd1-4ae7-bc01-be5f37cffeee/details (accessed on 2 March 2021).
- Jie, L.; Jiao, S.; Wang, X.; Wang, H. A new type of facility strawberry stereoscopic cultivation mode. J. China Agric. Univ. 2019, 24, 61–68. [Google Scholar]
- Ceres, R.; Pons, J.; Jiménez, A.; Martín, J.; Calderón, L. Design and implementation of an aided fruit-harvesting robot (Agribot). Ind. Robot Int. J. 1998, 25, 337–346. [Google Scholar] [CrossRef]
- Mandow, A.; Gomez-de-Gabriel, J.M.; Martinez, J.L.; Munoz, V.F.; Ollero, A.; Garcia-Cerezo, A. The autonomous mobile robot AURORA for greenhouse operation. IEEE Robot. Autom. Mag. 1996, 3, 18–28. [Google Scholar] [CrossRef] [Green Version]
- Agrobot. The First Pre-Commercial Robotic Harvesters for Gently Harvest Strawberries. 2020. Available online: https://www.agrobot.com/e-series (accessed on 2 March 2021).
- Robert, B. Fruit picking robots: Has their time come? Ind. Robot. Int. J. Robot. Res. Appl. 2020, 47, 141–145. [Google Scholar] [CrossRef]
- Leu, A.; Razavi, M.; Langstädtler, L.; Ristić-Durrant, D.; Raffel, H.; Schenck, C.; Gräser, A.; Kuhfuss, B. Robotic Green Asparagus Selective Harvesting. IEEE/ASME Trans. Mechatron. 2017, 22, 2401–2410. [Google Scholar] [CrossRef]
- Birrell, S.; Hughes, J.; Cai, J.Y.; Iida, F. A field-tested robotic harvesting system for iceberg lettuce. J. Field Robot. 2020, 37, 225–245. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ge, Y.; Xiong, Y.; Tenorio, G.L.; From, P.J. Fruit Localization and Environment Perception for Strawberry Harvesting Robots. IEEE Access 2019, 7, 147642–147652. [Google Scholar] [CrossRef]
- Sepúlveda, D.; Fernández, R.; Navas, E.; Armada, M.; González-De-Santos, P. Robotic Aubergine Harvesting Using Dual-Arm Manipulation. IEEE Access 2020, 8, 121889–121904. [Google Scholar] [CrossRef]
- Xiong, Y.; Ge, Y.; Grimstad, L.; From, P.J. An autonomous strawberry-harvesting robot: Design, development, integration, and field evaluation. J. Field Robot. 2020, 37, 202–224. [Google Scholar] [CrossRef] [Green Version]
- Kang, H.; Zhou, H.; Chen, C. Visual Perception and Modeling for Autonomous Apple Harvesting. IEEE Access 2020, 8, 62151–62163. [Google Scholar] [CrossRef]
- Yu, Y.; Zhang, K.; Liu, H.; Yang, L.; Zhang, D. Real-Time Visual Localization of the Picking Points for a Ridge-Planting Strawberry Harvesting Robot. IEEE Access 2020, 8, 116556–116568. [Google Scholar] [CrossRef]
- Lehnert, C.; McCool, C.; Sa, I.; Perez, T. Performance improvements of a sweet pepper harvesting robot in protected cropping environments. J. Field Robot. 2020, 37, 1197–1223. [Google Scholar] [CrossRef]
- Arad, B.; Balendonck, J.; Barth, R.; Ben-Shahar, O.; Edan, Y.; Hellström, T.; Hemming, J.; Kurtser, P.; Ringdahl, O.; Tielen, T.; et al. Development of a sweet pepper harvesting robot. J. Field Robot. 2020, 37, 1027–1039. [Google Scholar] [CrossRef]
- Lehnert, C.; English, A.; McCool, C.; Tow, A.W.; Perez, T. Autonomous Sweet Pepper Harvesting for Protected Cropping Systems. IEEE Robot. Autom. Lett. 2017, 2, 872–879. [Google Scholar] [CrossRef] [Green Version]
- Megalingam, R.K.; Kuttankulangara Manoharan, S.; Mohan, S.M.; Vadivel, S.R.R.; Gangireddy, R.; Ghanta, S.; Kotte, S.; Perugupally, S.T.; Sivanantham, V. Amaran: An Unmanned Robotic Coconut Tree Climber and Harvester. IEEE/ASME Trans. Mechatron. 2020, 26, 288–299. [Google Scholar] [CrossRef]
- Noguchi, N.; Reid, J.; Benson, E.; Stombaugh, T. Vision Intelligence for an Agricultural Mobile Robot Using a Neural Network. IFAC Proc. Vol. 1998, 31, 139–144. [Google Scholar] [CrossRef]
- Noguchi, N.; Reid, J.F.; Ishii, K.; Terao, H. Multi-Spectrum Image Sensor for Detecting Crop Status by Robot Tractor. IFAC Proc. Vol. 2001, 34, 111–115. [Google Scholar] [CrossRef]
- Bargoti, S.; Underwood, J.P. Image Segmentation for Fruit Detection and Yield Estimation in Apple Orchards. J. Field Robot. 2017, 34, 1039–1060. [Google Scholar] [CrossRef] [Green Version]
- Lopes, C.; Graça, J.; Sastre, J.; Reyes, M.; Guzman, R.; Braga, R.; Monteiro, A.; Pinto, P. Vineyard Yield Estimation by Vinbot Robot—Preliminary Results with the White Variety Viosinho. In Proceedings of the 11th International Terroir Congress, McMinnville, OR, USA, 10–14 July 2016. [Google Scholar] [CrossRef]
- VineRobot. Available online: http://www.vinerobot.eu/ (accessed on 3 March 2021).
- Abrahão, G.Q.S.; Megda, P.T.; Guerrero, H.B.; Becker, M. AgriBOT project: Comparison between the D* and focussed D* navigation algorithms. In Proceedings of the International Congress of Mechanical Engineering—COBEM, Natal, Brazil, 24–28 October 2011. [Google Scholar]
- Lulio, L.C. Fusão Sensorial por ClassificaçãO Cognitiva Ponderada no Mapeamento de Cenas Naturais AgríColas para AnáLise Quali-Quantitativa em Citricultura. Ph.D. Thesis, Escola de Engenharia de São Carlos, Sao Paulo, Brazil, 2016. [Google Scholar]
- Lugli, L.; Tronco, M.; Porto, V. JSEG Algorithm and Statistical ANN Image Segmentation Techniques for Natural Scenes. In Image Segmentation; IntechOpen: Rijeka, Croatia, 2011; Chapter 18. [Google Scholar] [CrossRef] [Green Version]
- Santos, F.N.; Sobreira, H.; Campos, D.; Morais, R.; Moreira, A.P.; Contente, O. Towards a Reliable Robot for Steep Slope Vineyards Monitoring. J. Intell. Robot. Syst. 2016, 83, 429–444. [Google Scholar] [CrossRef]
- Santos, F.B.N.; Sobreira, H.M.P.; Campos, D.F.B.; Santos, R.M.P.M.; Moreira, A.P.G.M.; Contente, O.M.S. Towards a Reliable Monitoring Robot for Mountain Vineyards. In Proceedings of the 2015 IEEE International Conference on Autonomous Robot Systems and Competitions, Vila Real, Portugal, 8–10 April 2015; pp. 37–43. [Google Scholar]
- Reis, R.; Mendes, J.; Santos, F.N.; Morais, R.; Ferraz, N.; Santos, L.; Sousa, A. Redundant robot localization system based in wireless sensor network. In Proceedings of the 2018 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Torres Vedras, Portugal, 25–27 April 2018; pp. 154–159. [Google Scholar]
- Iida, M.; Kang, D.; Taniwaki, M.; Tanaka, M.; Umeda, M. Localization of CO2 source by a hexapod robot equipped with an anemoscope and a gas sensor. Comput. Electron. Agric. 2008, 63, 73–80. [Google Scholar] [CrossRef]
- Higuti, V.A.H.; Velasquez, A.E.B.; Magalhaes, D.V.; Becker, M.; Chowdhary, G. Under canopy light detection and ranging-based autonomous navigation. J. Field Robot. 2019, 36, 547–567. [Google Scholar] [CrossRef]
- Lowe, T.; Moghadam, P.; Edwards, E.; Williams, J. Canopy density estimation in perennial horticulture crops using 3D spinning lidar SLAM. J. Field Robot. 2021. [Google Scholar] [CrossRef]
- Shafiekhani, A.; Kadam, S.; Fritschi, F.B.; DeSouza, G.N. Vinobot and Vinoculer: Two Robotic Platforms for High-Throughput Field Phenotyping. Sensors 2017, 17, 214. [Google Scholar] [CrossRef]
- Shafiekhani, A.; Fritschi, F.; Desouza, G. Vinobot and Vinoculer: From Real to Simulated Platforms. In Proceedings of the SPIE Commercial + Scientific Sensing and Imaging, Orlando, FL, USA, 15–19 April 2018. [Google Scholar]
- Chapman, S.C.; Merz, T.; Chan, A.; Jackway, P.; Hrabar, S.; Dreccer, M.F.; Holland, E.; Zheng, B.; Ling, T.J.; Jimenez-Berni, J. Pheno-Copter: A Low-Altitude, Autonomous Remote-Sensing Robotic Helicopter for High-Throughput Field-Based Phenotyping. Agronomy 2014, 4, 279–301. [Google Scholar] [CrossRef] [Green Version]
- EcoRobotix. ARA Swuitch to Smart Scouting. 2020. Available online: https://www.ecorobotix.com/wp-content/uploads/2019/09/ECOX_FlyerPres19-EN-3.pdf (accessed on 21 March 2021).
- Santos, L.C.; Aguiar, A.S.; Santos, F.N.; Valente, A.; Petry, M. Occupancy Grid and Topological Maps Extraction from Satellite Images for Path Planning in Agricultural Robots. Robotics 2020, 9, 77. [Google Scholar] [CrossRef]
- Aguiar, A.S.; dos Santos, F.N.; Cunha, J.B.; Sobreira, H.; Sousa, A.J. Localization and Mapping for Robots in Agriculture and Forestry: A Survey. Robotics 2020, 9, 97. [Google Scholar] [CrossRef]
- Iqbal, J.; Xu, R.; Sun, S.; Li, C. Simulation of an Autonomous Mobile Robot for LiDAR-Based In-Field Phenotyping and Navigation. Robotics 2020, 9, 46. [Google Scholar] [CrossRef]
- FAO. World Food and Agriculture—Statistical pocketbook 2019. FAO 2019, 1, 254. [Google Scholar]
- Oliveira, L.F.P.; Rossini, F.L. Modeling, Simulation and Analysis of Locomotion Patterns for Hexapod Robots. IEEE Latin Am. Trans. 2018, 16, 375–383. [Google Scholar] [CrossRef]
- Silva, M.F.; Machado, J.T. A literature review on the optimization of legged robots. J. Vib. Control 2012, 18, 1753–1767. [Google Scholar] [CrossRef]
- Fankhauser, P. ANYmal C. 2020. Available online: https://www.anybotics.com/anymal-legged-robot/ (accessed on 7 March 2021).
- Unitree Robotics. Available online: https://www.unitree.com/ (accessed on 7 March 2021).
- Weilan. AlphaDog. 2020. Available online: http://www.weilan.com/ (accessed on 7 March 2021).
- Oliveira, L.F.P.; Manera, L.T.; Luz, P.D.G. Development of a Smart Traffic Light Control System with Real-Time Monitoring. IEEE Int. Things J. 2020, 1. [Google Scholar] [CrossRef]
- Oliveira, L.F.P.; Manera, L.T.; Luz, P.D.G. Smart Traffic Light Controller System. In Proceedings of the Sixth International Conference on Internet of Things: Systems, Management and Security (IOTSMS), Granada, Spain, 22–25 October 2019; pp. 155–160. [Google Scholar]
- Neumann, G.B.; Almeida, V.P.; Endler, M. Smart Forests: Fire detection service. In Proceedings of the 2018 IEEE Symposium on Computers and Communications (ISCC), Natal, Brazil, 25–28 June 2018; pp. 01276–01279. [Google Scholar]
- Cui, F. Deployment and integration of smart sensors with IoT devices detecting fire disasters in huge forest environment. Comput. Commun. 2020, 150, 818–827. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Robots | Locomotion System | Final Application | Navigation Sensors | Obstacle Detection Sensors | Development Stage | Year |
|---|---|---|---|---|---|---|
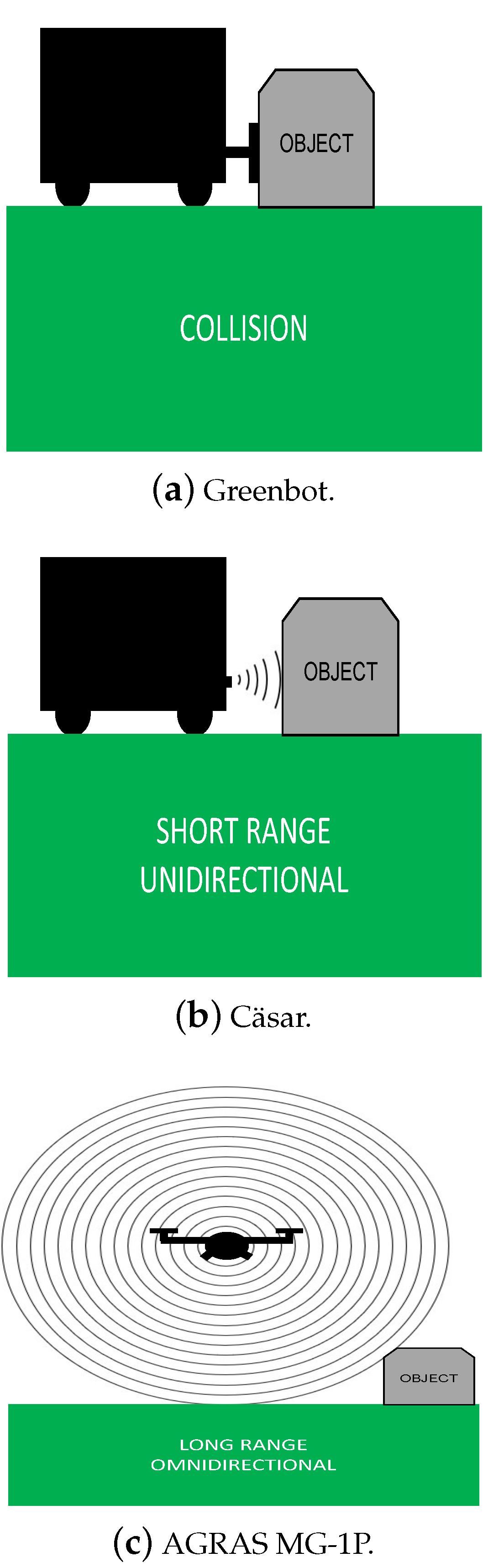
| Cäsar [21] | 4WD | Orchard or vineyard | RTK GNSS | Ultrasonic sensor | Commercial | 2014 |
| Greenbot [24] | 4WS | Horticulture, fruit and arable farming | RTK GPS | Bump sensor | Commercial | 2015 |
| AGRAS MG-1P [25] | UAV Octocopter | Rice, soy and corn | RTK GPS, RGB camera, gyroscope, accelerometer and compass | Omnidirectional radar | Commercial | 2016 |
| AgBot [23] | 2WD | Corn | RTK GPS, RGB camera, compass and accelerometer | – | Research | 2017 |
| Robots | Locomotion System | Final Application | Guidance Sensors | Seeding Mechanism | Development Stage | Year |
|---|---|---|---|---|---|---|
| Lumai-5 [28] | 4WS | Wheat | Angle and speed | Seeding motor and vacuum fan | Research | 2010 |
| Di-Wheel [29] | 2WD | Horticulture in general | Smartphone embedded sensors | Roll type seeder | Research | 2015 |
| Sowing robot 1 [30] | 4WD | Corn | Ultrasonic | Linear actuator and vacuum motor | Research | 2016 |
| Sowing robot 2 [31] | Track | Seeds in general | Ultrasonic and magnetometer | Solenoid actuator | Research | 2016 |
| Task | Robots | Locomotion System | Final Application | Location Sensors | Sensors Used to Perform the Task | Computer Vision Algorithms |
|---|---|---|---|---|---|---|
| Disease identification | Disease robot [36] | Not included | Bell pepper | – | RGB camera and laser | PCA and CV |
| eAGROBOT [37] | 4WD | Cotton and groundnut | – | RGB camera | K-means and Neural Networks | |
| Mechanical weeding | Weeding robot 1 [38] | 4WD | Broccoli and lettuce | – | RGB-D camera | RANSAC |
| AgBot II [40] | 4WS | Cotton, sow thistle, feather top rhodes grass and wild oats | – | RGB camera | LBP | |
| Oz [41] | 4WD | Vegetables, nurseries, and horticulture | LiDAR | RGB camera | – | |
| Dino [42] | 4WS | Vegetables in row and on beds | RTK/GPS | RGB camera | – | |
| Ted [43] | 4WS | Grape | RTK/GPS | RGB camera | – | |
| VITIROVER [44] | 4WD | Soil grass | RTK/GNSS | – | – | |
| Tertill [45] | 4WD | Residential gardens | – | Capacitive sensors | – | |
| K-Weedbot [46] | 4WS | Paddy field | RGB camera | – | Hough transform | |
| AIGAMO-ROBOT [47] | Track | Paddy field | – | – | – | |
| Weeding robot 2 [48] | 4WD | Paddy field | Capacitive and azimuth sensors | – | – | |
| Weeding robot 3 [49] | Boat | Paddy field | GPS and IMU | – | – | |
| Chemical weeding | AgriRobot [50] | 4WD | Grape | RGB camera and LiDAR | – | FDA and GDA |
| SAVSAR [50] | 4WD | Grape | RGB camera and LiDAR | – | FDA and GDA | |
| Robotic sprayer [51] | 4WD | Grape | RGB camera and laser | – | FDA and GDA | |
| RIPPA [52] | 4WS | Lettuce, cauliflower and broccoli | RTK/GPS/INS and LiDAR | Hyperspectral and thermal cameras | ExG-ExR | |
| LadyBird [53] | 4WS | Lettuce, cauliflower and broccoli | RTK/GPS/INS and LiDAR | Hyperspectral and thermal cameras | ExG-ExR | |
| BoniRob [54] | 4WS | Sugar beet | – | RGB, NIR cameras and ultrasonic sensor | CNN | |
| Aerial robot [56] | UAV (Octocopter) | Grape | GPS and IMU | Multispectral camera | NDVI | |
| Bly-c-agri [60] | UAV (Hexacopter) | Grape | GNSS | – | – | |
| Pollination | Pollinator robot [62] | 4WD | Kiwi | Odometry | RGB camera | CNN |
| Pruning | Pruning robot 1 [65] | Mobile plataform | Grape | – | RGB camera | SVM |
| Pruning robot 2 [66] | Mobile plataform | Grape | – | RGB-D camera | Faster R-CNN | |
| General purpose | Swagbot [55] | 4WS | General farms | GPS and LiDAR | RGB-D, IR and hiperspectral cameras | NDVI |
| Thorvald II [67] | Many forms | General farms | Depends on the application | Depends on the application | Depends on the application | |
| Clearpath robots [68] | Many forms | General farms | Depends on the application | Depends on the application | Depends on the application | |
| AgroBot [69] | 4WD | General farms | – | – | – |
| Robot | Robotic Arm | Final Application | Location Sensors | Sensors Used to Perform the Task | Computer Vision Algorithm | Success Rate (Cycle Time) |
|---|---|---|---|---|---|---|
| Agrobot E-Series [75] | 24 Cartesians arms | Strawberry | LiDAR | RGB camera, ultrasonic and inductive sensors | – | – |
| Berry 5 [76] | Multiple robotic components | Strawberry | GPS and LiDAR | RGB camera | – | – |
| GARotics [77] | Pneumatic cylinder with two blades | Green asparagus | – | RGB-D camera | RANSAC and euclidean clustering | 90% (2 s) |
| Vegebot [78] | 6-DoF and a custom end effector | Lettuce | – | RGB camera | R-CNN | 88.2% (31.7 s) |
| Noronn AS [79] | 5-DoF | Strawberry | – | RGB-D camera | R-CNN | 74.1% |
| Harvester robot 1 [80] | 6-DoF dual-arm | Aubergines | – | RGB-D and ToF cameras | SVM | 91.67% (26 s) |
| Harvester robot 2 [81] | 3-DoF cartesian dual-arm | Strawberry | LiDAR and encoder | RGB-D camera | HSV color-thresholding | 50–97.1% (4.6 s) |
| Harvester robot 3 [82] | 6-DoF soft-finger based gripper | Apple | – | RGB-D camera | Dasnet, 3D-SHT and Octree | : 0.81 (7 s) |
| Harvester robot 4 [83] | 6-DoF | Strawberry | – | RGB and laser sensors | R-YOLO | 84.35% |
| Harvey plataform [84] | 6-DoF | Sweet pepper | – | RGB-D camera, pressure and separation sensors | DCNN | 76.5% (36.9 s) |
| SWEEPER [85] | 6-DoF with custom designed end effector | Sweet pepper | – | RGB-D camera | Deep learning, shape, color-based detection and HT | 61% (24 s) |
| Amaran [87] | 4-DoF | Coconut | – | RGB camera | – | 80–100% (21.9 min) |
| Task | Robot | Final Application | Location Sensors | Sensors Used to Perform the Task | Computer Vision Algorithm |
|---|---|---|---|---|---|
| Yield Estimation | Shrimp [90] | Apple | – | RGB camera | MLP and CNN |
| VINBOT [91] | Grape | RTK, DGPS and LiDAR | RGB and NIR cameras | NDVI | |
| VineRobot [92] | Grape | – | FA-Sense LEAF, FA-Sense ANTH, ultrasonic and RGB camera | Chlorophyll-based fluorescence and RGB machine vision | |
| AgriBOT [93] | Orange and sugar cane | GPS/INS and LiDAR | RGB camera | – | |
| Agrob V14 [96] | Grape | LiDAR | RGB camera | SVM | |
| Agrob V16 [98] | Grape | RTK/GPS/INS and LiDAR | Stereo, RGB-D and RGB cameras | hLBP and SVM | |
| Hexapod [99] | General farms | – | gas module, anemoscope and infrared distance sensor | – | |
| Kubota farm vehicle [101] | Grape | GPS and IMU | LiDAR | Continuous-Time SLAM | |
| Phenotyping | TerraSentia [100] | Corn | RTK/GPS and LiDAR | RGB camera | LiDAR-based navigation |
| Vinobot [102] | Corn | DGPS and LiDAR | Stereo camera and environmental sensors | VisualSFM | |
| Vinoculer [103] | Corn | – | Stereo RGB and IR cameras and air temperature sensors | VisualSFM | |
| Pheno-Copter [104] | Sorghum, sugarcane and wheat | – | RGB and thermal cameras and LiDAR | RANSAC and DEM | |
| Ara ecoRobotix [105] | General farms | RTK/GPS and compass | RGB camera | – |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Oliveira, L.F.P.; Moreira, A.P.; Silva, M.F. Advances in Agriculture Robotics: A State-of-the-Art Review and Challenges Ahead. Robotics 2021, 10, 52. https://doi.org/10.3390/robotics10020052
Oliveira LFP, Moreira AP, Silva MF. Advances in Agriculture Robotics: A State-of-the-Art Review and Challenges Ahead. Robotics. 2021; 10(2):52. https://doi.org/10.3390/robotics10020052
Chicago/Turabian StyleOliveira, Luiz F. P., António P. Moreira, and Manuel F. Silva. 2021. "Advances in Agriculture Robotics: A State-of-the-Art Review and Challenges Ahead" Robotics 10, no. 2: 52. https://doi.org/10.3390/robotics10020052