An Embedded Platform for Positioning and Obstacle Detection for Small Unmanned Aerial Vehicles



Abstract
:1. Introduction
2. Materials and Methods
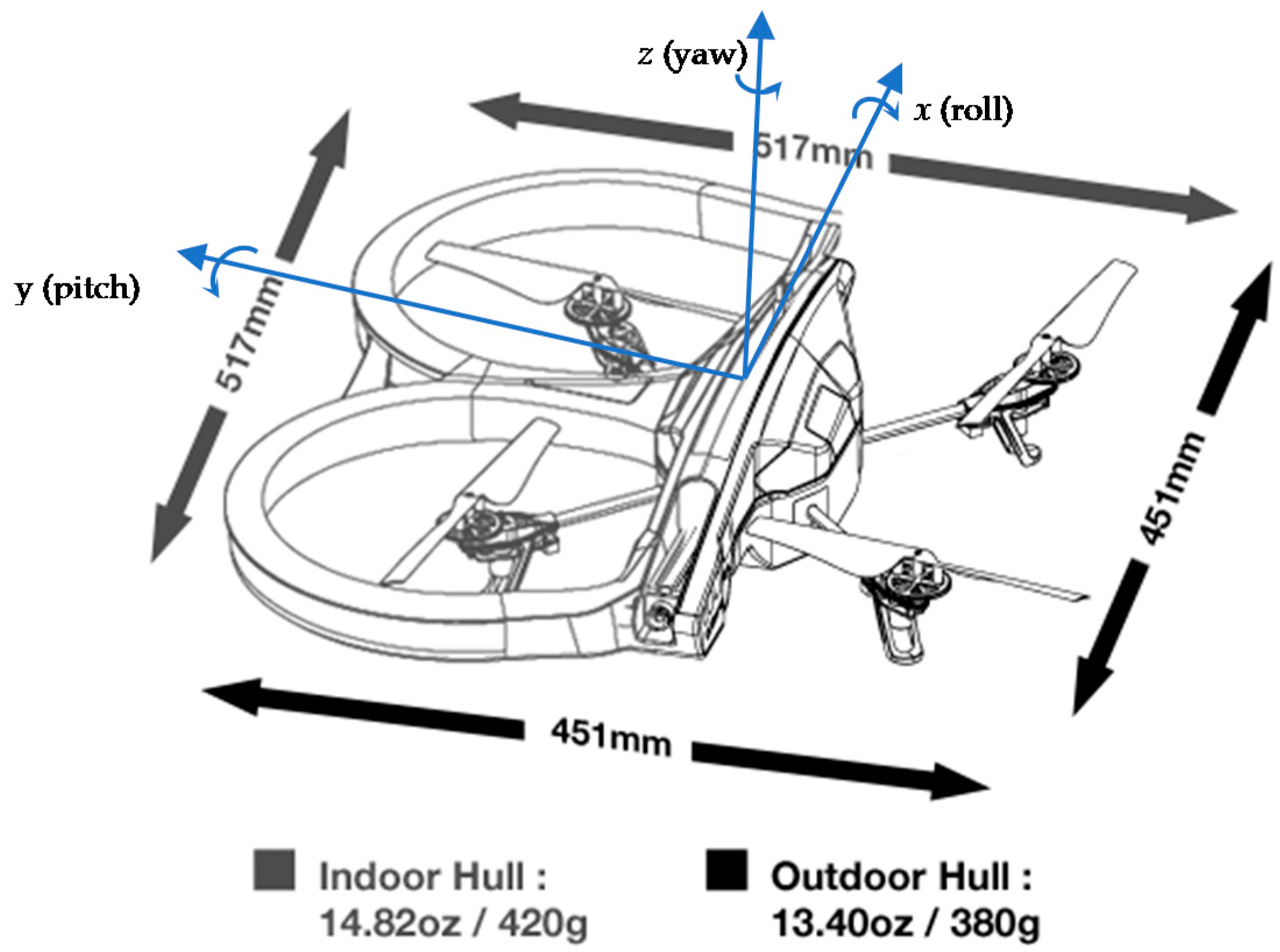
2.1. Unmanned Aerial Vehicle
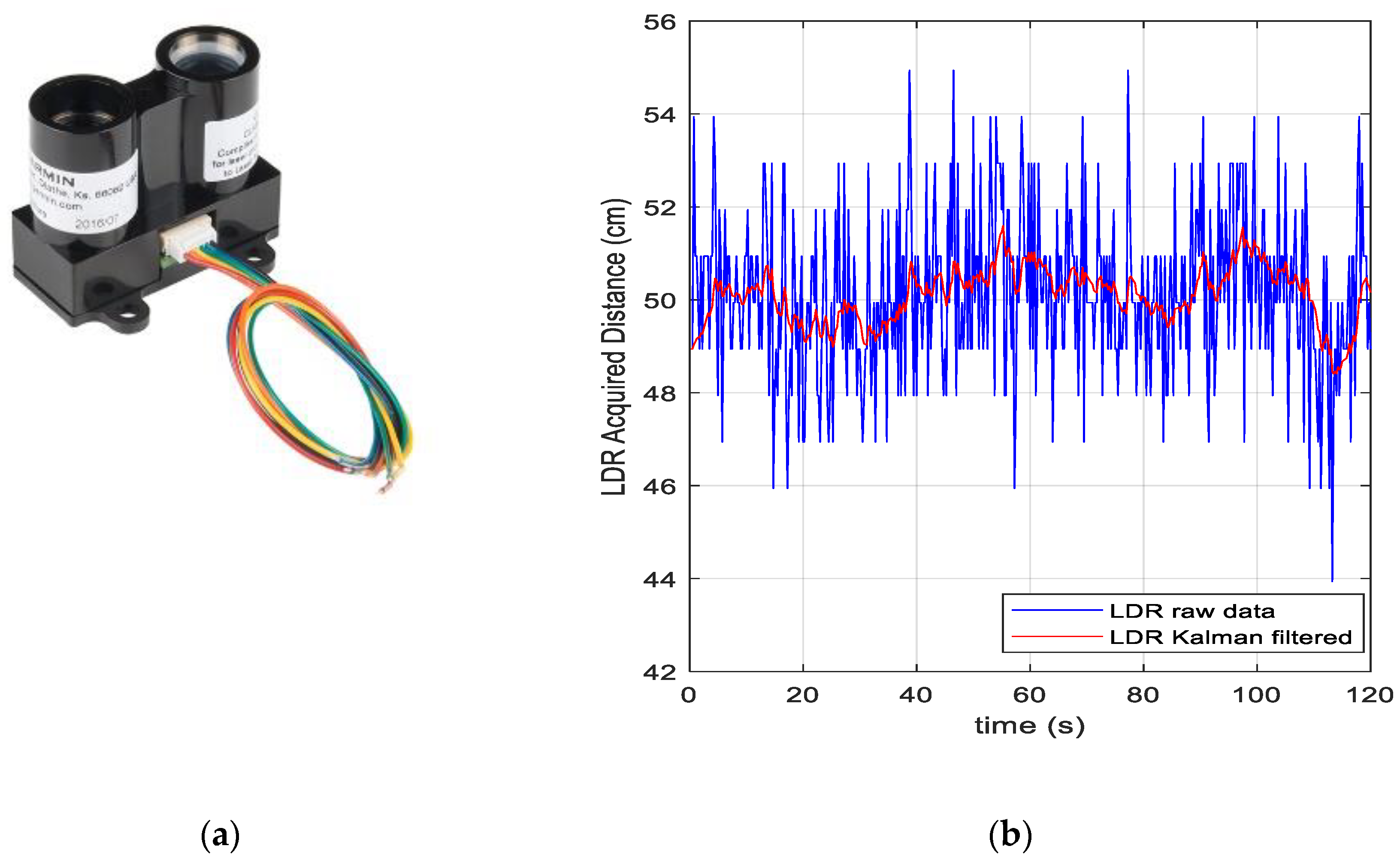
2.2. LiDAR Sensor
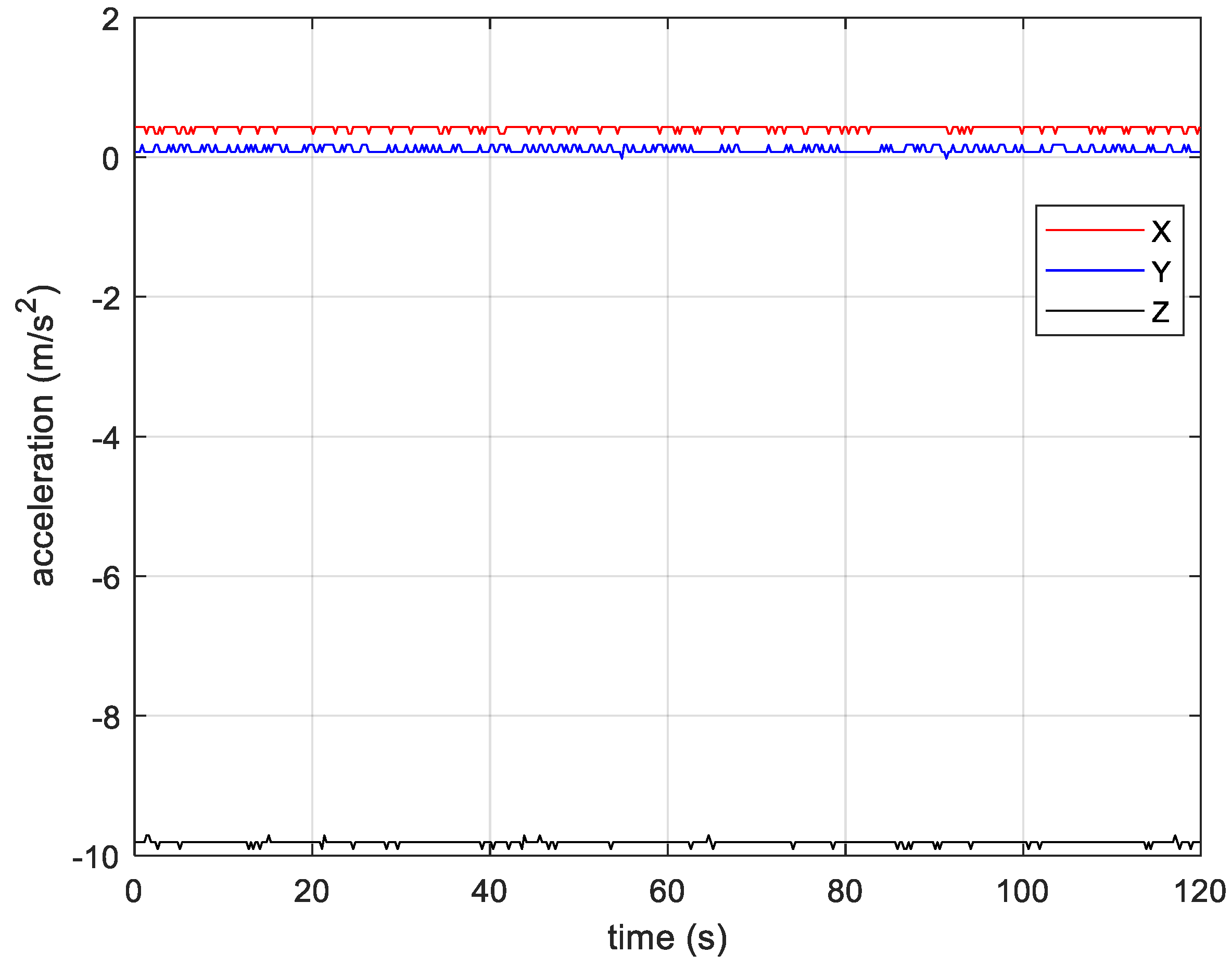
2.3. IMU and Accelerometer Calibration Procedure
2.4. WiFi Module
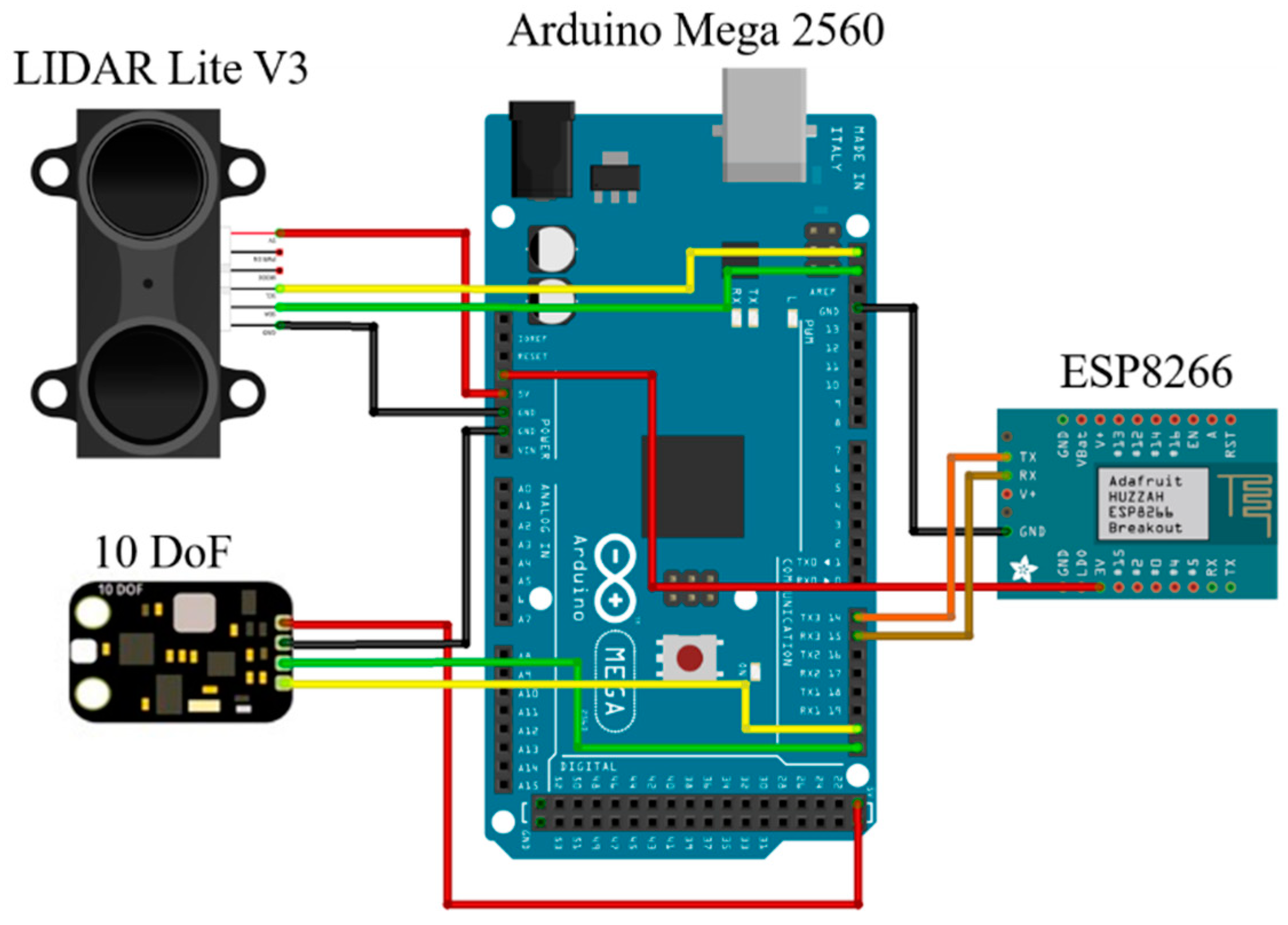
2.5. Microcontroller and Assembly
2.6. Platform State Estimation
3. Experimental Results and System Validation
4. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Valavanis, K.V. Advances in Unmanned Aerial Vehicles—State of Art and the Road to Autonomy; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Papa, U. Embedded Platforms for UAS Landing Path and Obstacle Detection: Integration and Development of Unmanned Aircraft Systems; Springer: Berlin/Heidelberg, Germany, 2018; Volume 136. [Google Scholar]
- Lillian, B. FAA Predicts Future UAS Growth. 2019. Available online: https://unmanned-aerial.com/faa-predicts-future-uas-growth (accessed on 15 May 2020).
- González-Jorge, H.; Martínez-Sánchez, J.; Bueno, M.; Arias, P. Unmanned Aerial Systems for Civil Applications: A Review. Drones 2017, 1, 2. [Google Scholar] [CrossRef]
- Sigala, A.; Langhals, B. Applications of Unmanned Aerial Systems (UAS): A Delphi Study Projecting Future UAS Missions and Relevant Challenges. Drones 2020, 4, 8. [Google Scholar] [CrossRef] [Green Version]
- Dept. of Transportation. Unmanned Aircraft Systems (UAS) Service Demand 2015-2035: Literature Review & Projections of Future Usage; Technical Report, Version 0.1; UASF Aerospace Management Systems Division, Air Traffic Systems Branch (AFLCMC/HBAG): Bedford, MA, USA, 2013; 151p. [Google Scholar]
- Ollero, A. UAV Applications. In Handbook of Unmanned Aerial Vehicles; Valavanis, K.P., Vachtsevanos, G.J., Eds.; Springer: Berlin/Heidelberg, Germany, 2015; pp. 2638–2860. [Google Scholar]
- MahmoudZadeh, S.; Powers, D.M.W.; Zadeh, R.B. Autonomy and Unmanned Vehicles—Augmented Reactive Mission and Motion Planning Architecture; Springer Nature Singapore Pte Ltd.: Singapore, 2019; 66C-PRT; Volume I, pp. 562–566. [Google Scholar]
- Mustapha, B.; Zayegh, A.; Begg, R.K. Multiple sensors based obstacle detection system. In Proceedings of the 4th International Conference on Intelligent and Advanced Systems (ICIAS2012), Kuala Lumpur, Malaysia, 12–14 June 2012. [Google Scholar]
- Gageik, N.; Benz, P.; Montenegro, S. Obstacle Detection and Collision Avoidance for a UAV with Complementary Low-Cost Sensors. IEEE Access 2015, 3, 599–609. [Google Scholar] [CrossRef]
- Engel, J.; Sturm, J.; Cremers, D. Camera-based navigation of a low-cost quadrocopter. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura, Portugal, 7–12 October 2012; pp. 2815–2821. [Google Scholar] [CrossRef] [Green Version]
- Aswini, N.; Uma, S.V. Obstacle Detection in Drones Using Computer Vision Algorithm. In Advances in Signal Processing and Intelligent Recognition Systems. SIRS 2018; Thampi, S., Marques, O., Krishnan, S., Li, K.C., Ciuonzo, D., Kolekar, M., Eds.; Communications in Computer and Information Science; Springer: Singapore, 2019; Volume 968. [Google Scholar]
- Phan, C.; Liu, H.H. A cooperative UAV/UGV platform for wildfire detection and fighting. In Proceedings of the 2008 Asia Simulation Conference–7th International Conference on System Simulation and Scientific Computing, Beijing, China, 10–12 December 2008; pp. 494–498. [Google Scholar]
- Austin, R. Unmanned Aircraft Systems: UAVS Design, Development and Deployment; Wiley and Sons, Ltd.: Hoboken, NJ, USA, 2010. [Google Scholar]
- Kendoul, F. Survey of advances in guidance, navigation, and control of unmanned rotorcraft systems. J. Field Robot. 2012, 29, 315–378. [Google Scholar] [CrossRef]
- Sobers, D.M.; Chowdhary, G., Jr.; Johnson, E.N. Indoor Navigation for Unmanned Aerial Vehicles. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Chicago, IL, USA, 10–13 August 2009. [Google Scholar]
- Fraga-Lamas, P.; Ramos, L.; Mondéjar-Guerra, V.; Fernández-Caramés, T.M. A Review on IoT Deep Learning UAV Systems for Autonomous Obstacle Detection and Collision Avoidance. Remote. Sens. 2019, 11, 2144. [Google Scholar] [CrossRef] [Green Version]
- Papa, U.; Del Core, G. Design and Assembling of a Low-Cost Mini UAV Quadcopter System; Technical Paper; Department of Science and Technology, University of Naples “Parthenope”: Napoli, Italy, 2014. [Google Scholar]
- Ariante, G.; Papa, U.; Ponte, S.; Del Core, G. UAS for positioning and field mapping using LiDAR and IMU sensors data: Kalman filtering and integration. In Proceedings of the 2019 IEEE 5th International Workshop on Metrology for AeroSpace, Torino, Italy, 19–21 June 2019; pp. 522–527. [Google Scholar] [CrossRef]
- Ariante, G. Embedded System for Precision Positioning, Detection, and Avoidance (PODA) for Small UAS. IEEE A&E Syst. Mag. 2020. in print. [Google Scholar] [CrossRef]
- Scherer, S.; Chamberlain, L.; Singh, S. Autonomous landing at unprepared sites by a full-scale helicopter. Robot. Auton. Syst. 2012, 60, 1545–1562. [Google Scholar] [CrossRef]
- Jeong, N.; Hwang, H.; Matson, E.T. Evaluation of low-cost LiDAR sensor for application in indoor UAV navigation. In Proceedings of the 2018 IEEE Sensors Applications Symposium (SAS), Seoul, Korea, 12–14 March 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Gui, P.; Tang, L.; Mukhopadhyay, S. MEMS based IMU for tilting measurement: Comparison of complementary and kalman filter based data fusion. In Proceedings of the 2015 IEEE 10th Conference on Industrial Electronics and Applications (ICIEA), Auckland, New Zealand, 15–17 June 2015; pp. 2004–2009. [Google Scholar]
- McCarron, B. Low-Cost IMU Implementation via Sensor Fusion Algorithms in the Arduino Environment; Polytechnic State University: San Obispo, CA, USA, 2013. [Google Scholar]
- Kumar, G.A.; Patil, A.K.; Patil, R.; Park, S.S.; Chai, Y.H. A LiDAR and IMU Integrated Indoor Navigation System for UAV and Its Application in Real-Time Pipeline Classification. Sensors 2017, 17, 1268. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Papa, U.; Ariante, G.; Del Core, G. UAS Aided Landing and Obstacle Detection through LiDAR-Sonar data. In Proceedings of the 2018 5th IEEE International Workshop on Metrology for AeroSpace, Rome, Italy, 20–22 June 2018. [Google Scholar]
- Papa, U.; Del Core, G. Design of sonar sensor model for safe landing of UAVs. In Proceedings of the IEEE Workshop on Metrology for Aerospace, Benevento, Italy, 4–5 June 2015; pp. 361–365. [Google Scholar]
- Papa, U.; Ponte, S. Preliminary Design of an Unmanned Aircraft System for Aircraft General Visual Inspection. Electronics 2018, 7, 435. [Google Scholar] [CrossRef] [Green Version]
- Son, J.-H.; Choi, S.; Cha, J. A brief survey of sensors for detect, sense, and avoid operations of Small Unmanned Aerial Vehicles. In Proceedings of the 2017 17th International Conference on Control, Automation and Systems (ICCAS), Jeju, Korea, 18–21 October 2017; pp. 279–282. [Google Scholar]
- Gautam, A.; Sujit, P.; Saripalli, S. A survey of autonomous landing techniques for UAVs. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems, ICUAS 2014—Conference Proceedings, Orlando, FL, USA, 27–30 May 2014; pp. 1210–1218. [Google Scholar]
- Krajnìk, T.; Vonàsek, V.; Fišer, D.; Faigl, J. AR-Drone as a Platform for Robotic Research and Education. In EUROBOT 2011, CCIS 161; Obdržálek, D., Gottscheber, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2011; pp. 172–186. [Google Scholar]
- Mac, T.T.; Copot, C.; Ionescu, C.M. Detection and Estimation of Moving obstacles for a UAV. IFAC-PapersOnLine 2019, 52, 22–27. [Google Scholar] [CrossRef]
- Parrot Drones SAS. Parrot AR. Drone 2.0 Elite Edition—Description and Technical Data. 2019. Available online: https://www.parrot.com/eu/drones/parrot-ardrone-20-elite-edition#parrot-ardrone-20-elite-edition (accessed on 10 January 2020).
- Garmin. Lidar.Lite v3 Operation Manual and Technical Specifications; Garmin Ltd.: Olathe, KS, USA, 2016; Available online: https://static.garmin.com/pumac/LiDAR_Lite_v3_Operation_Manual_and_Technical_Specifications.pdf (accessed on 10 March 2020).
- I2C Info. I2C Info—I2C Bus, Interface and Protocol. 2020. Available online: https://i2c.info/ (accessed on 15 April 2020).
- Meier, R. Roger Meier’s Freeware. 2020. Available online: https://freeware.the-meiers.org/ (accessed on 15 April 2020).
- DFRobot. 10- DoF MEMS IMU Sensor V2.0 2020. Available online: https://www.dfrobot.com/wiki/index.php/10_DOF_Mems_IMU_Sensor_V2.0_SKU:_SEN0140 (accessed on 20 March 2020).
- Analog Devices. Small, Low Power, 3-Axis ±3g Accelerometer ADXL335-345—Rev. 0 2009. Available online: https://www.sparkfun.com/datasheets/Components/SMD/adxl335.pdf (accessed on 10 March 2020).
- Honeywell Inc. 3-Axis Digital Compass IC HMC5883L—Advanced Information. 2013. Available online: https://www.jameco.com/Jameco/Products/ProdDS/2150248.pdf (accessed on 20 February 2020).
- InvenSense Inc. ITG-3205 Product Specification—Revision 1.0. Document Number: PS-ITG-3205A-00. 2010. Available online: https://www.tinyosshop.com/datasheet/itg3205.pdf (accessed on 10 May 2020).
- Bosch Sensortec. BMP280 Digital Pressure Sensor Datasheet; Rev. 1.13, BST-BMP280-DS001-10; Bosch Sensortec GmbH: Reutlingen, Germany, 2014. [Google Scholar]
- Thong, Y.; Woolfson, M.; Crowe, J.; Hayes-Gill, B.; Jones, D. Numerical double integration of acceleration measurements in noise. Measurement 2004, 36, 73–92. [Google Scholar] [CrossRef]
- ST Microelectronics. Application Note AN4508—Parameters and Calibration of a Low-g 3-Axis Accelerometer; DocID026444-Rev 1; ST Microelectronics: Geneva, Switzerland, 2014; 13p, Available online: https://html.alldatasheet.vn/html-pdf/694488/STMICROELECTRONICS/AN4508/1943/1/AN4508.html (accessed on 17 July 2020).
- Stevens, B.L.; Lewis, F.L.; Johnson, E.N. Aircraft Control and Simulation (3rd Edition)—Dynamics, Controls Design, and Autonomous Systems; John Wiley & Sons Inc.: Hoboken, NJ, USA, 2016. [Google Scholar]
- Seed Studio. Arduino Library to Control Grove 3-Axis Digital Gyro Base on ITG 3200. 2013. Available online: https://github.com/Seeed-Studio/Grove_3_Axis_Digital_Gyro (accessed on 3 June 2020).
- Espressif Systems IOT Team. ESP8266EX Datasheet—Version 4.3. 2015. Available online: https://www.espressif.com/sites/default/files/documentation/0a-esp8266ex_datasheet_en.pdf (accessed on 20 April 2020).
- Espressif Systems IOT Team. ESP8266EX Technical Reference—Version 1.4. 2019. Available online: https://www.espressif.com/sites/default/files/documentation/esp8266-technical_reference_en.pdf (accessed on 20 April 2020).
- Grewal, M.; Andrews, A. Kalman Filtering—Theory and Practice Using MATLAB®, 4th ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2015. [Google Scholar]
- Gelb, A. (Ed.) Applied Optimal Estimation; MIT Press: Cambridge, MA, USA; London, UK, 1974; p. 2001. [Google Scholar]
- Del Hougne, P.; Imani, M.F.; Diebold, A.V.; Horstmeyer, R.; Smith, D.R. Learned Integrated Sensing Pipeline: Reconfigurable Metasurface Transceivers as Trainable Physical Layer in an Artificial Neural Network. Adv. Sci. 2019, 7, 1901913. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, T.; Corchado, J.M.; Bajo, J.; Sun, S.; De Paz, J.F. Effectiveness of Bayesian filters: An information fusion perspective. Inf. Sci. 2016, 329, 670–689. [Google Scholar] [CrossRef]
- Li, T.; Wang, X.; Liang, Y.; Pan, Q. On Arithmetic Average Fusion and Its Application for Distributed Multi-Bernoulli Multitarget Tracking. IEEE Trans. Signal Process. 2020, 1. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Distance (cm) | LiDAR | LiDAR+IMU Fusion | ||||
|---|---|---|---|---|---|---|
| (cm2) | (cm2) | (cm2) | (cm2) | (m2/s4) | (m2/s4) | |
| 120 | 1.69 | 1.00 | 1.00 | 0.40 | 0.80 | 0.32 |
| 90 | 0.755 | 0.40 | 0.50 | 0.30 | 0.57 | 0.36 |
| 30 | 10.4 | 1.64 | 0.40 | 0.28 | 0.34 | 0.26 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ponte, S.; Ariante, G.; Papa, U.; Del Core, G. An Embedded Platform for Positioning and Obstacle Detection for Small Unmanned Aerial Vehicles. Electronics 2020, 9, 1175. https://doi.org/10.3390/electronics9071175
Ponte S, Ariante G, Papa U, Del Core G. An Embedded Platform for Positioning and Obstacle Detection for Small Unmanned Aerial Vehicles. Electronics. 2020; 9(7):1175. https://doi.org/10.3390/electronics9071175
Chicago/Turabian StylePonte, Salvatore, Gennaro Ariante, Umberto Papa, and Giuseppe Del Core. 2020. "An Embedded Platform for Positioning and Obstacle Detection for Small Unmanned Aerial Vehicles" Electronics 9, no. 7: 1175. https://doi.org/10.3390/electronics9071175