BBR-CWS: Improving the Inter-Protocol Fairness of BBR



Abstract
:1. Introduction
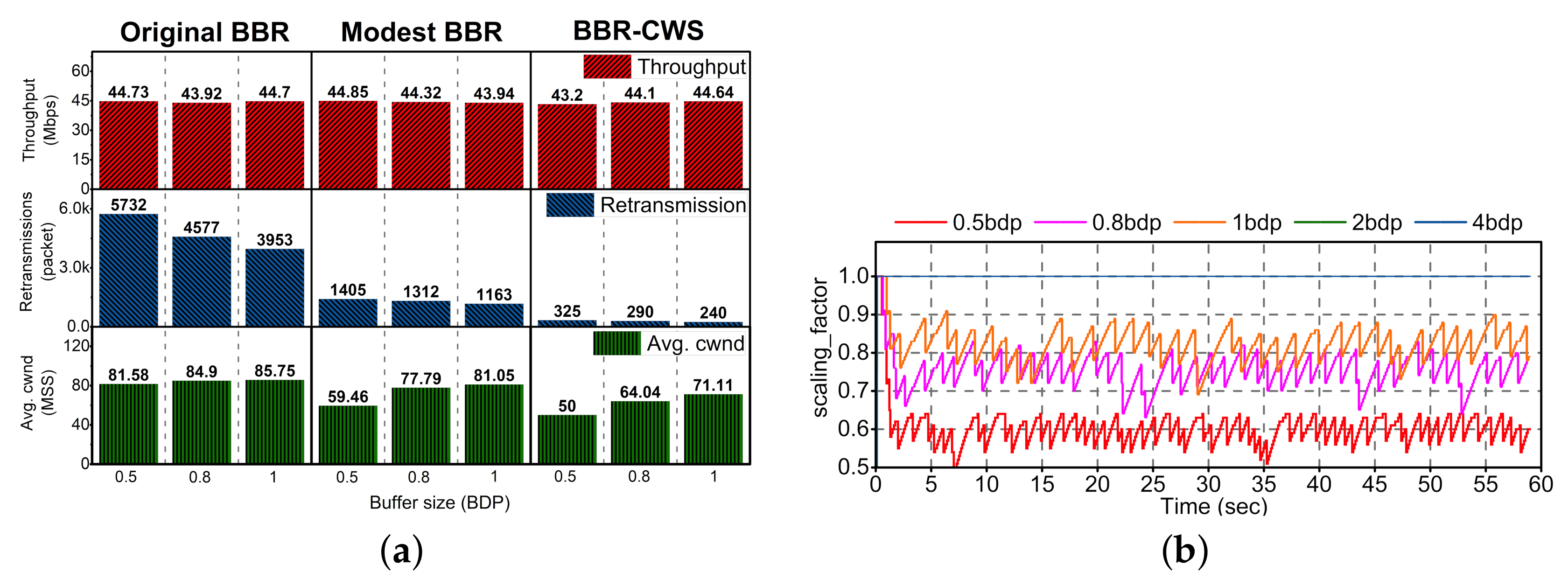
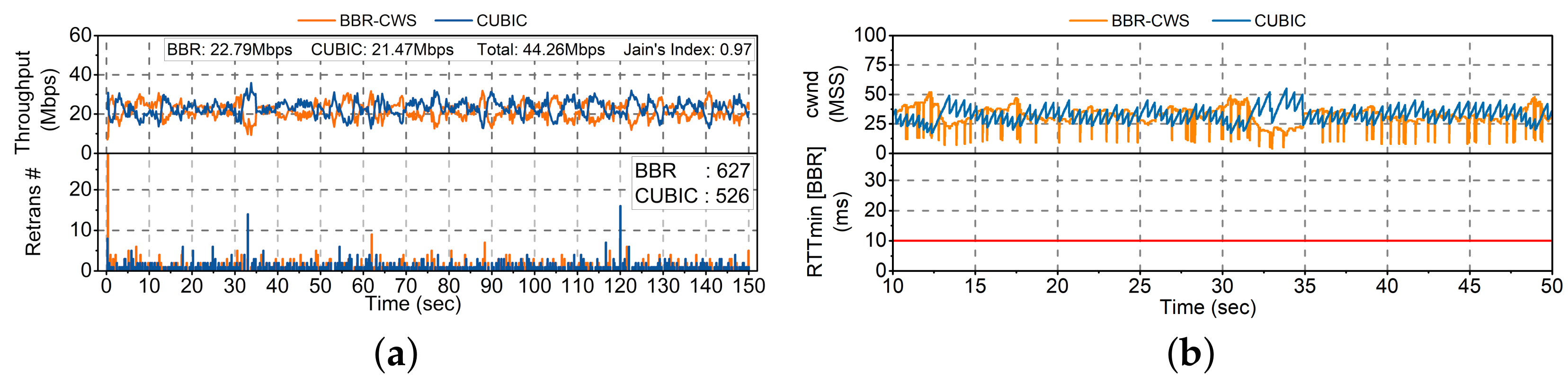
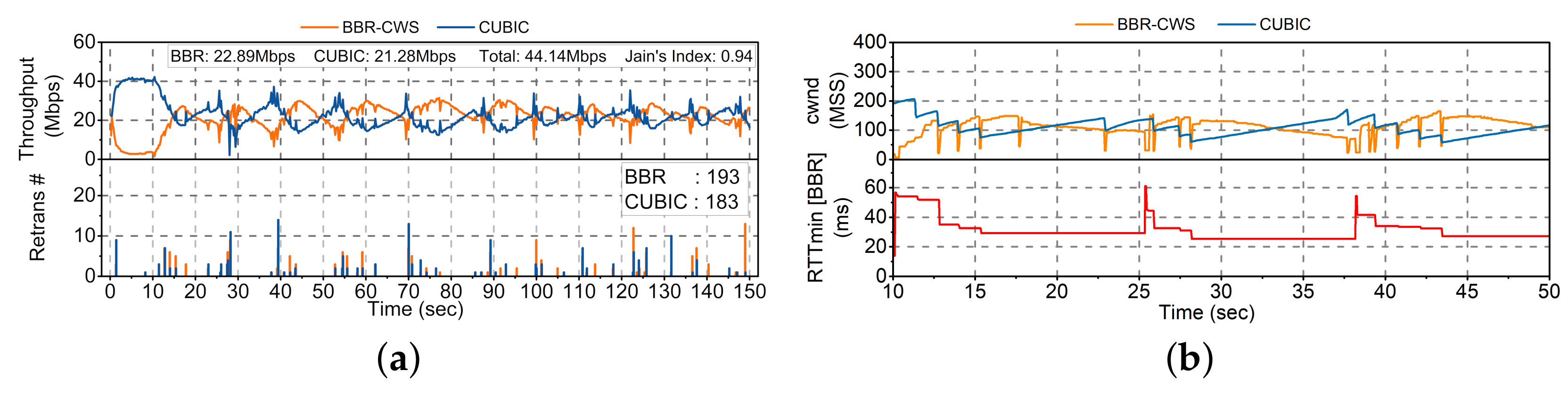
- BBR-CWS improves inter-protocol fairness when it shares the link with loss-based congestion control algorithms and reduces excessive retransmissions.
- The main difference between BBR-CWS and the original BBR is that BBR-CWS uses RTprop’s changes to determine packet loss cause, and then, performs the corresponding operation to improve inter-protocol fairness, reducing aggressiveness and packet retransmission.
- BBR-CWS was implemented on Ubuntu with Linux Kernel version 4.14 [29], adding a single function, “bbr_set_upper_scaling_factor”, and a mechanism to reduce the congestion window by packet loss on current BBRv1 implementation, hence BBR-CWS has lightweight implementation.
2. Related Works
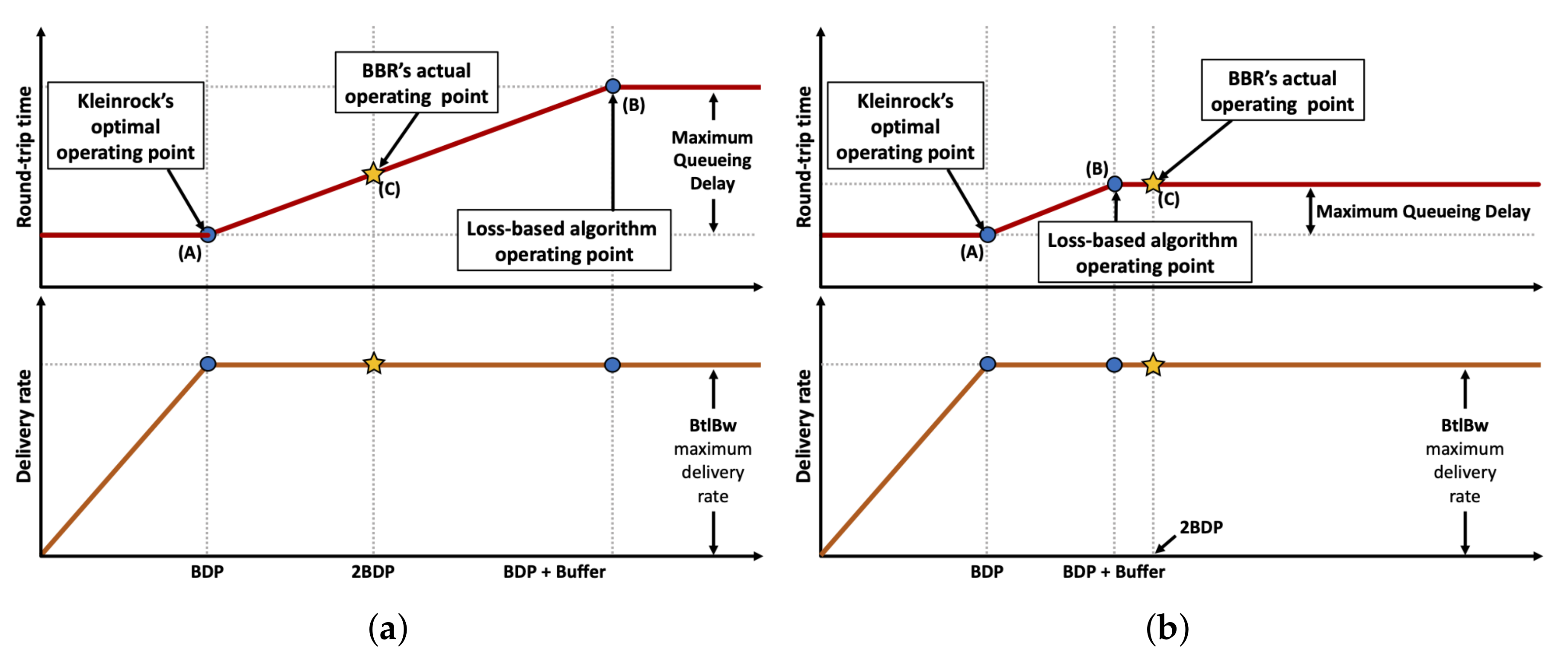
2.1. BBR Operation with Shallow Buffer
2.2. Inter-Protocol Fairness with Loss-Based Algorithm
2.3. RTT Fairness and Its Solutions
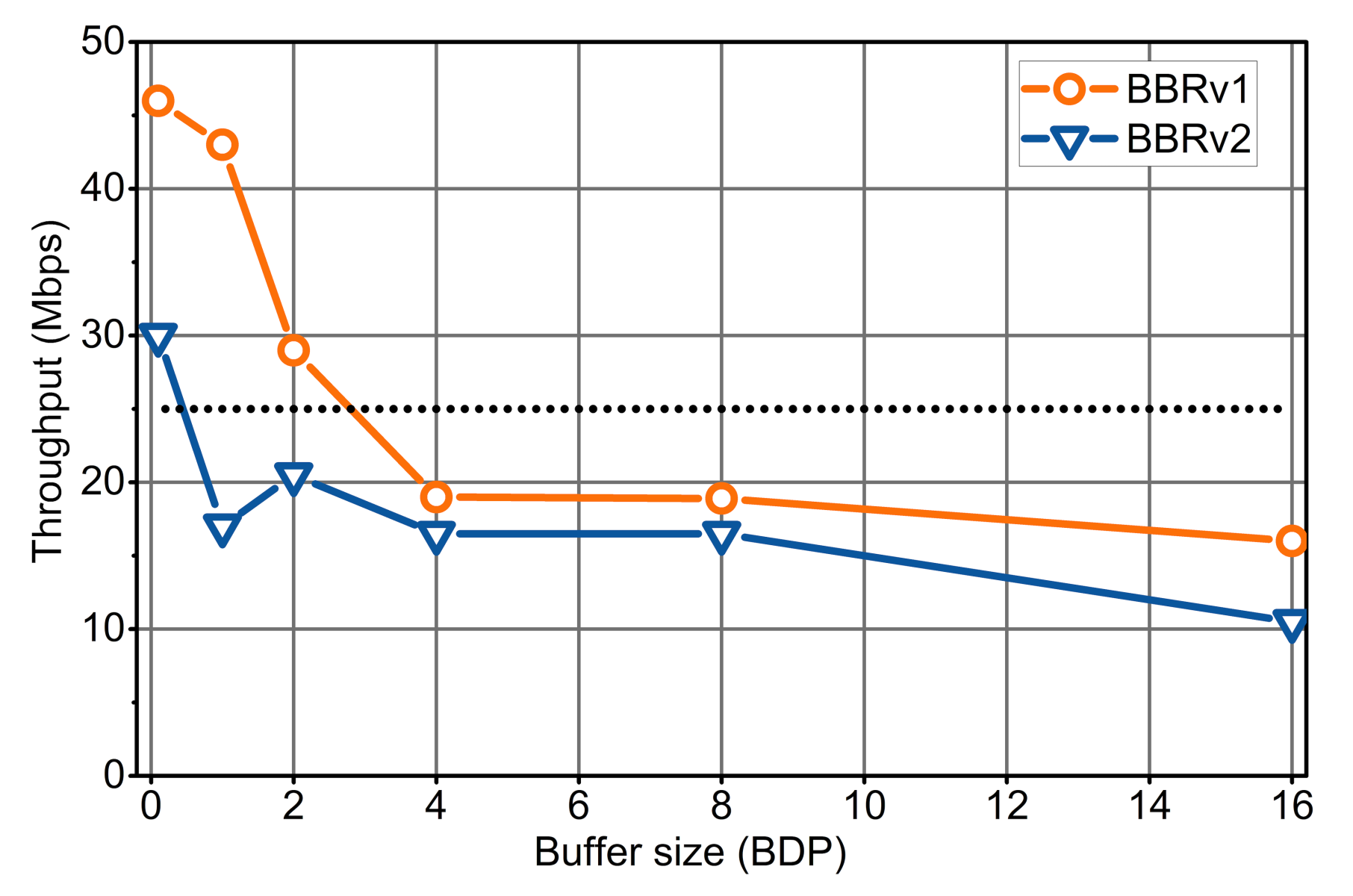
2.4. BBRv2
2.5. Solutions for Inter-Protocol Fairness of BBR
3. Unfairness with Loss-Based Algorithm
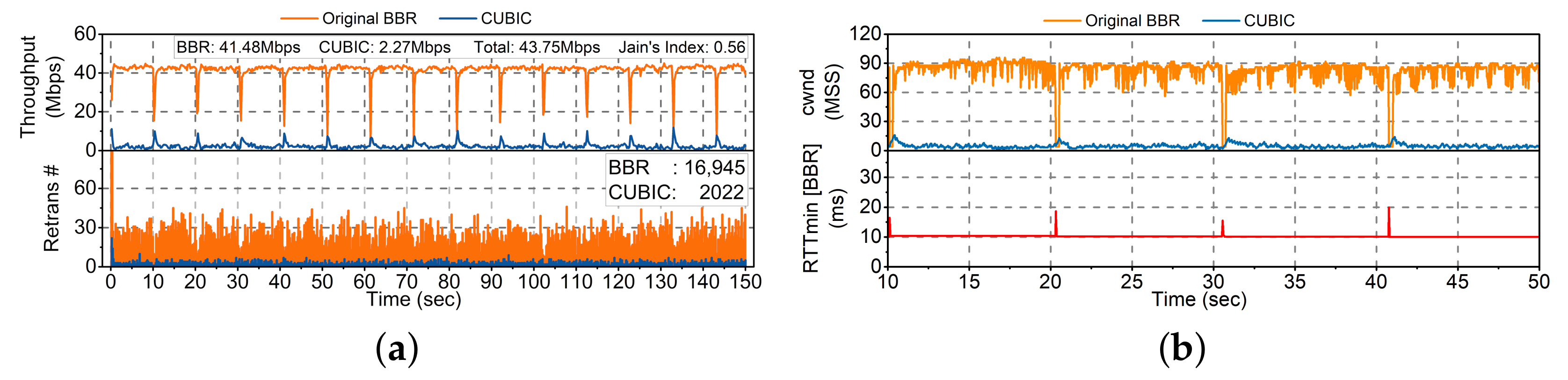
3.1. Shallow Buffer: Static Cwnd_gain
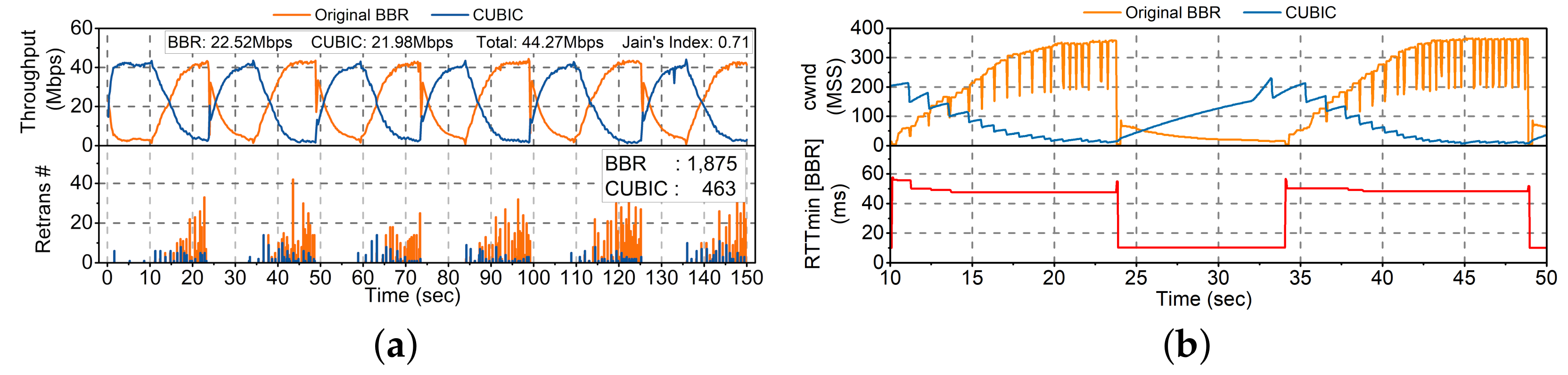
3.2. Deep Buffer: Minimum RTT Overestimation
4. BBR-CWS: BBR Congestion Window Scaling
- loss_detected_time: This variable indicates the time stamp to which BBR-CWS’s tcp_ca_state is set to TCP_CA_Recovery, which indicates that BBR-CWS has detected packet loss.
- is_rtt_min_updated: This variable checks whether the lower RTprop is measured within a certain time after BBR reduces the congestion window in order to decrease inflight.
- last_action_time: This variable denotes the time when BBR performed the last action of increasing or decreasing upper_scaling_factor.
- upper_cwnd: This variable is defined as the product of upper_scaling_factor and target_cwnd, and it represents the actual maximum size of the congestion window scaled by the BBR-CWS scheme.
| Algorithm 1: BBR congestion window upper scaling. |
|
4.1. Minimum Round-Trip Time Update
4.2. Upper Congestion Window Scaling
5. Experimental Results
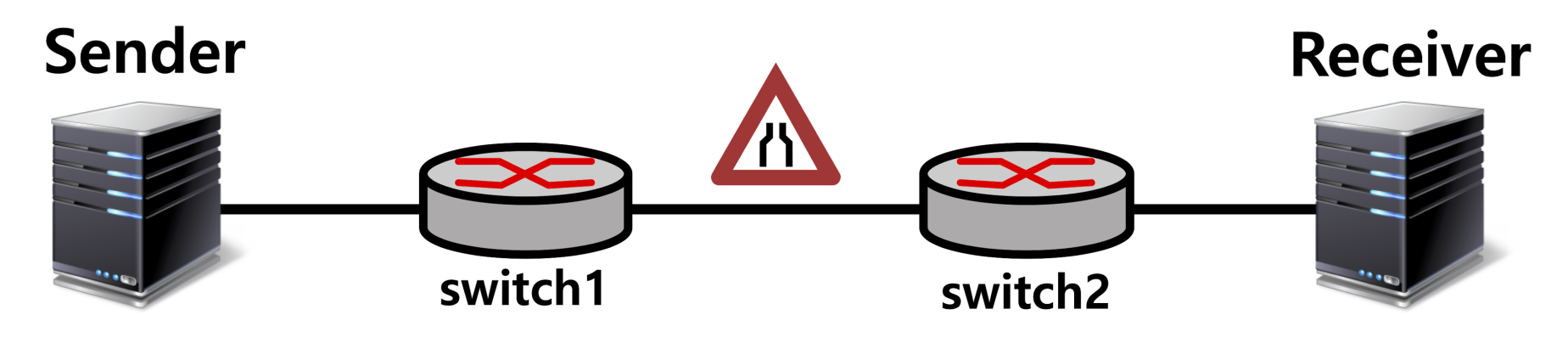
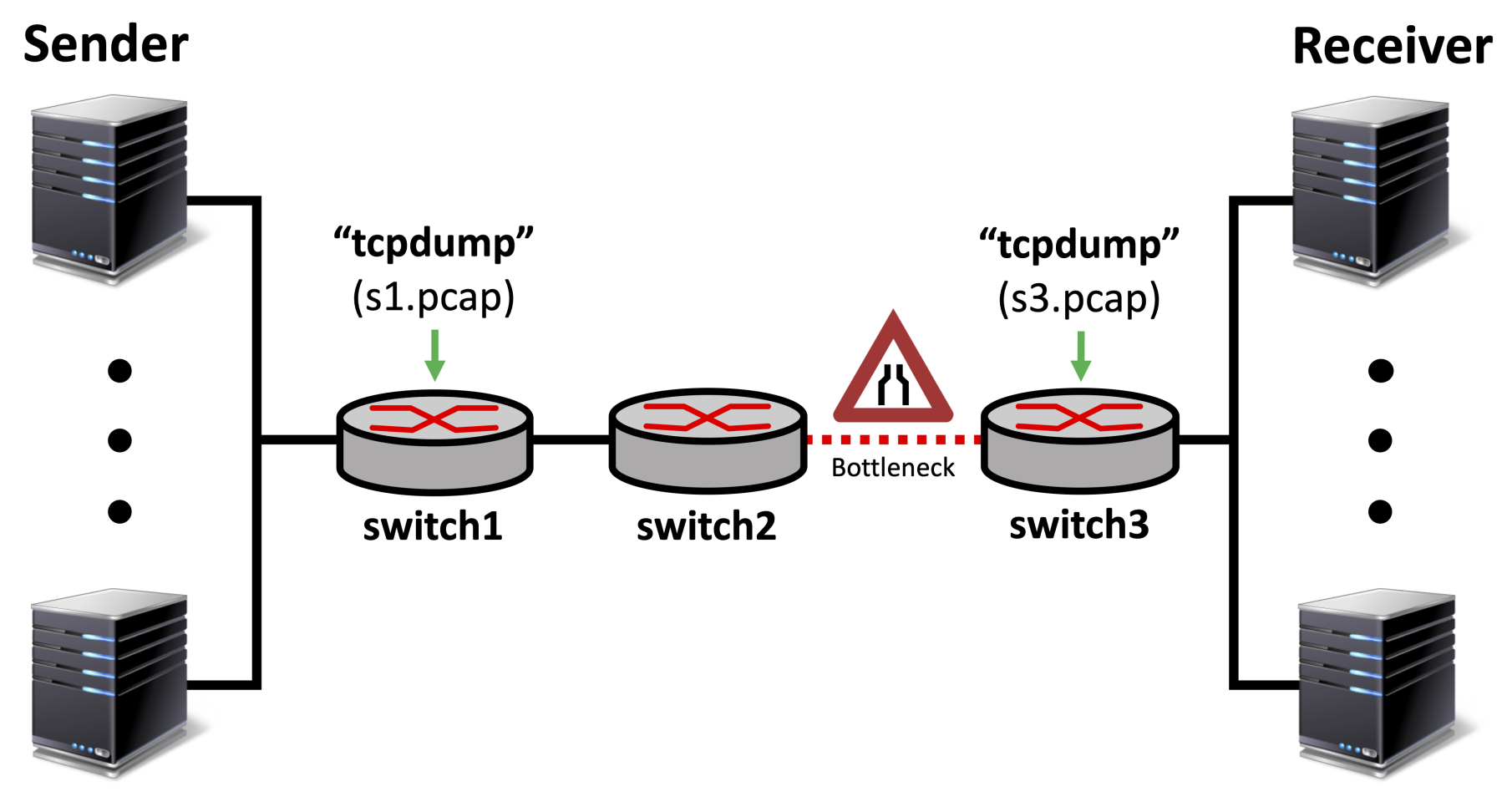
5.1. Mininet Experimental Topology
5.2. Modest BBR: Benchmark Algorithm
| Algorithm 2:Modest BBR congestion control. |
|
5.3. Single Operation Evaluation
5.4. Interactive Operation Evaluation
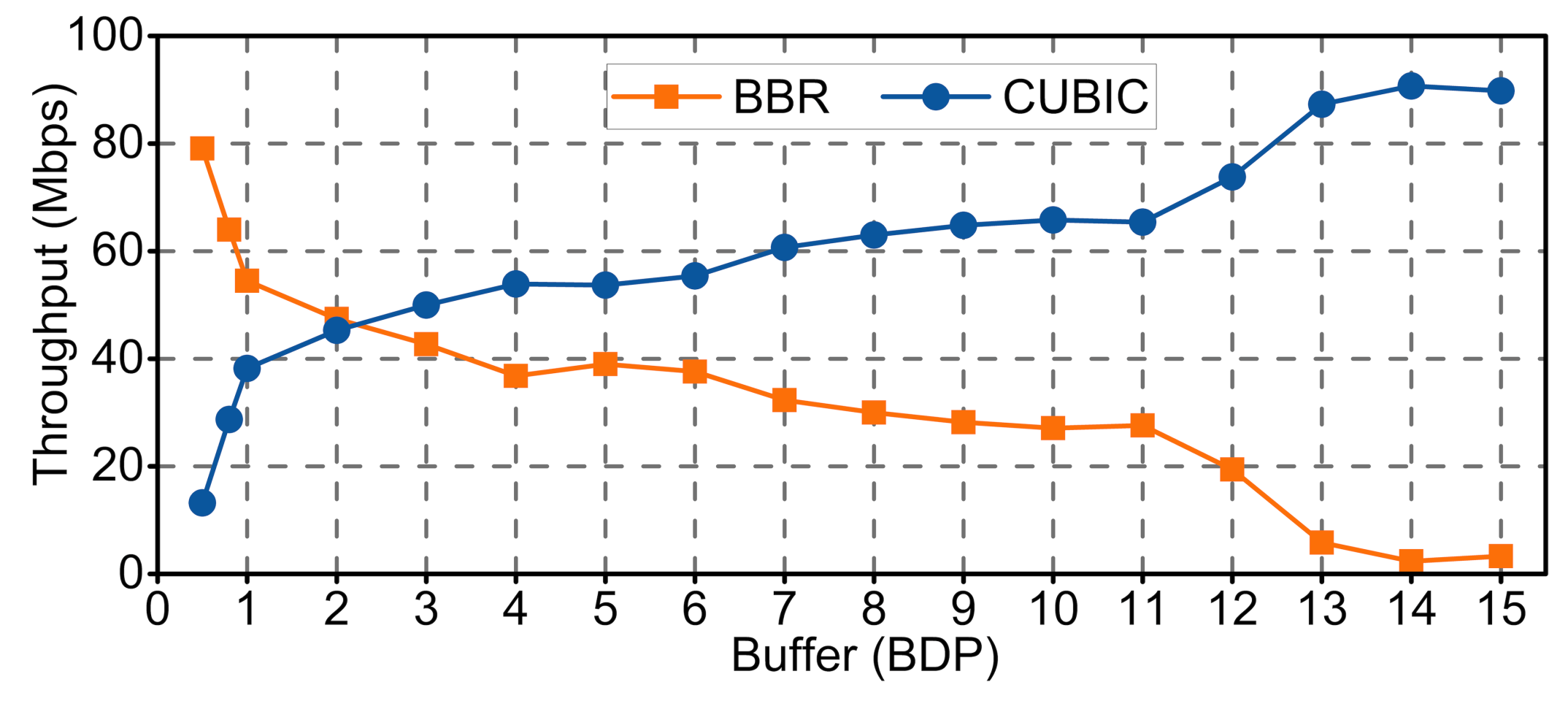
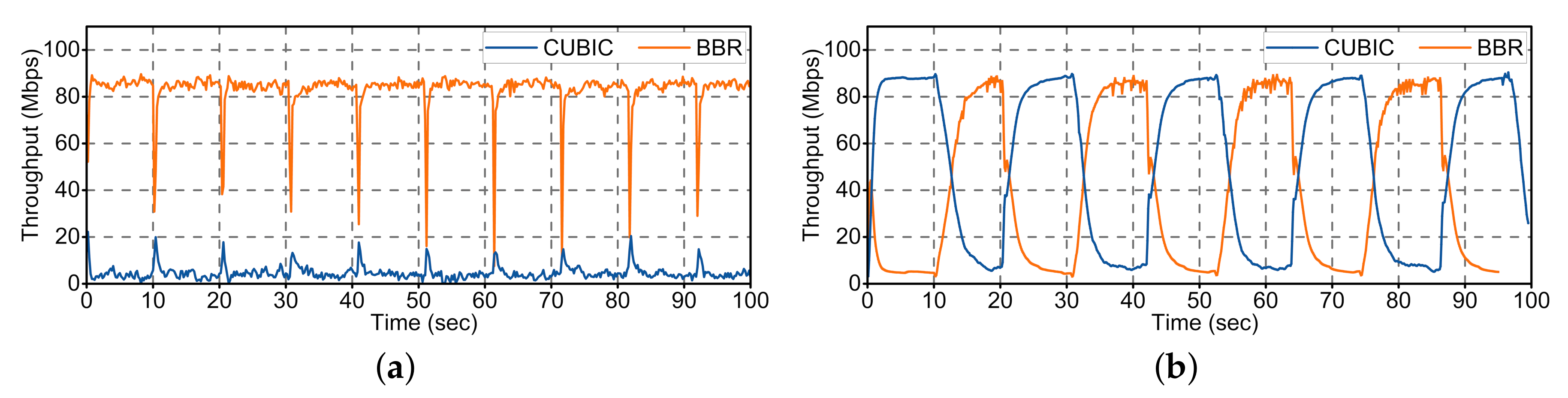
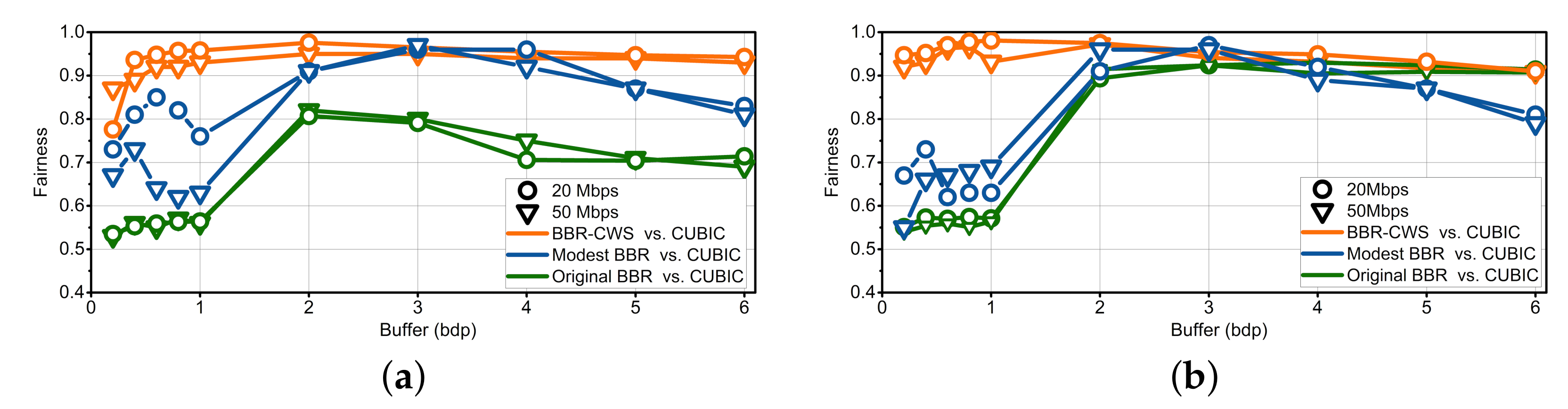
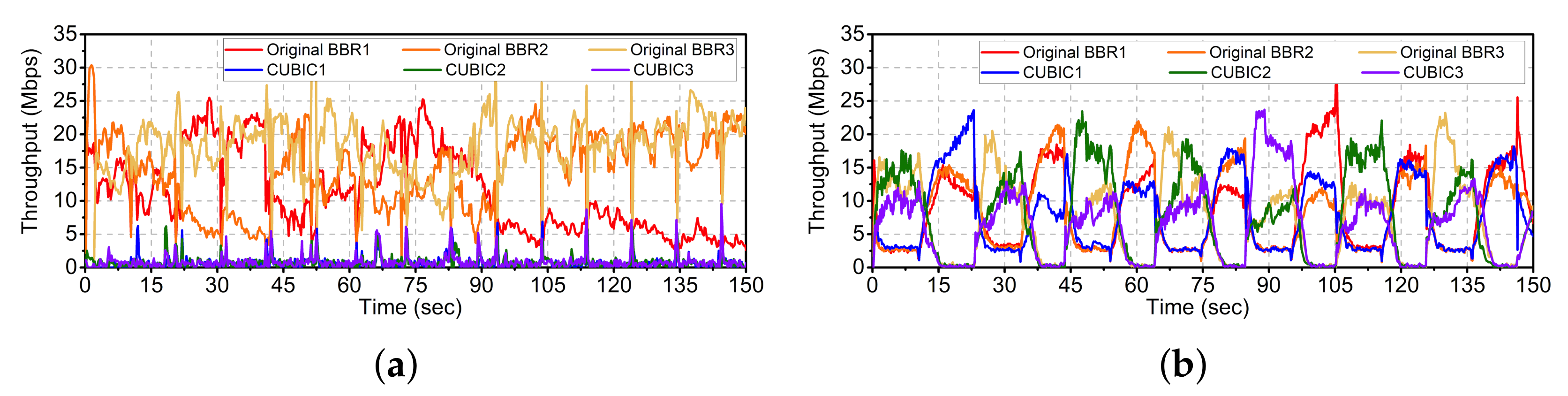
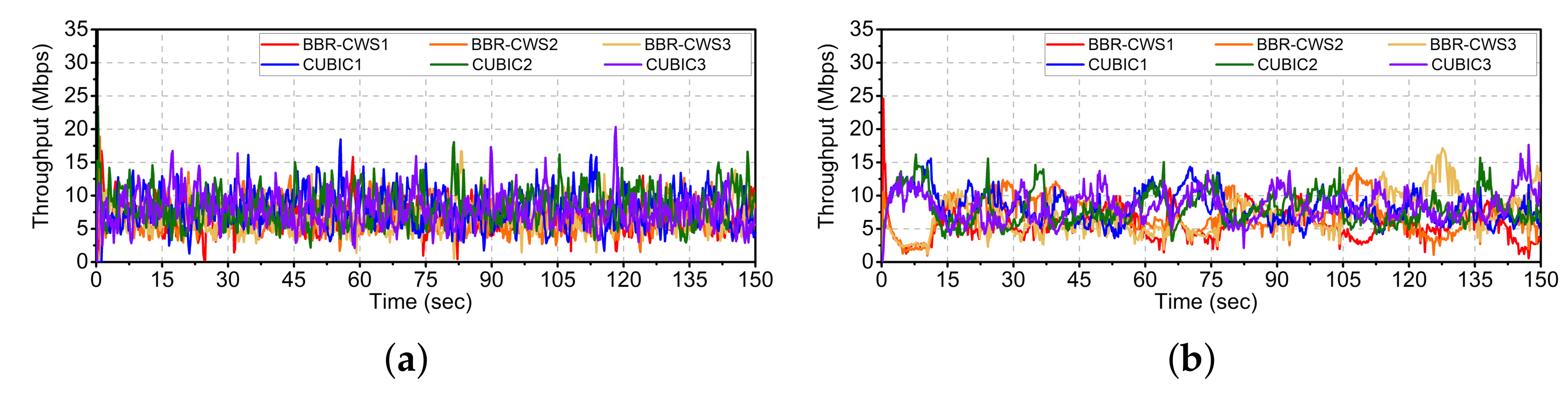
5.5. Multiple Flow Competition of BBR and CUBIC
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| BBR | Bottleneck Bandwidth Round-trip propagation time |
| BBR-CWS | BBR Congestion Window Scaling |
| TCP | Transmission Control Protocol |
| BDP | Bandwidth Delay Product |
| RTT | Round-Trip Time |
| BtlBw | Bottleneck Bandwidth |
| RTprop | Round-Trip propagation time |
| cwnd | congestion window |
| IETF | Internet Engineering Task Force |
| MSS | Maximum Segment Size |
| DA-BBR | Delay-Aware BBR |
| Modest BBR | Moderately Aggressive BBR |
| DCTCP | Data Center TCP |
| ECN | Explicit Congestion Notification |
| BBRv2 | BBR version 2 |
| netem | network emulator |
References
- Postel, J. Transmission Control Protocol. 1981, pp. 1–16. Available online: https://www.rfc-editor.org/rfc/rfc793.txt (accessed on 18 February 2020).
- Stevens, W.R. TCP/IP Illustrated, the Protocols; Addison-Wesley Professional: Boston, MA, USA, 1994; Volume 1. [Google Scholar]
- Jacobson, V. Congestion avoidance and control. In Proceedings of the SIGCOMM, Stanford, CA, USA, 16–18 August 1988; pp. 314–329. [Google Scholar]
- Afanasyev, A.; Tilley, N.; Reiher, P.; Kleinrock, L. Host-to-host congestion control for TCP. IEEE Commun. Surv. Tutor. 2010, 12, 304–342. [Google Scholar] [CrossRef] [Green Version]
- Allman, M.; Paxson, V.; Blanton, E. TCP Congestion Control. Standards Track. 2009, pp. 1–18. Available online: https://www.rfc-editor.org/rfc/rfc5681.txt (accessed on 18 February 2020).
- Henderson, T.; Floyd, S.; Nishida, Y. The NewReno Modification to TCP’s Fast Recovery Algorithm. Standards Track. 2012, pp. 1–16. Available online: http://www.ietf.org/rfc/rfc6582.txt (accessed on 18 February 2020).
- Ha, S.; Rhee, I.; Xu, L. CUBIC: A new TCP-friendly high speed TCP variant. ACM SIGOPS Oper. Syst. Rev. 2008, 42. [Google Scholar] [CrossRef]
- Gettys, J.; Nichols, K. Bufferbloat: Dark buffers in the Internet. ACM Queue 2011, 9, 40:40–40:54. [Google Scholar] [CrossRef]
- Cardwell, N.; Cheng, Y.; Gunn, C.S.; Yeganeh, S.H.; Jacobson, V. BBR: Congestion-based congestion control. ACM Queue 2016, 14, 50:20–50:53. [Google Scholar] [CrossRef] [Green Version]
- Cardwell, N.; Cheng, Y.; Gunn, C.S.; Yeganeh, S.H.; Jacobson, V. BBR Congestion Control. In Proceedings of the IETF 97th Meeting, Seoul, Korea, 13–18 November 2016; Available online: https://www.ietf.org/proceedings/97/slides/slides-97-iccrg-bbr-congestion-control-02.pdf (accessed on 18 February 2020).
- Kleinrock, L. Power and deterministic rules of thumb for probabilistic problems in computer communications. In Proceedings of the International Conference on Communications, Boston, MA, USA, 10–14 June 1979; Volume 43, pp. 1–10. [Google Scholar]
- Hock, M.; Bless, R.; Zitterbart, M. Experimental evaluation of BBR congestion control. In Proceedings of the International Conference on Network Protocols (ICNP), Toronto, ON, Canada, 10–13 October 2017. [Google Scholar]
- Jaeger, B.; Scholz, D.; Raumer, D.; Geyer, F.; Carle, G. Reproducible measurement of TCP BBR congestion control. Comput. Commun. 2019, 144, 31–43. [Google Scholar] [CrossRef]
- Scholz, D.; Jaeger, B.; Schwaighofer, L.; Raumer, L.; Geyer, F.; Carle, G. Toward a Deeper Understanding of TCP BBR Congestion Control. In Proceedings of the IFIP Networking, Zurich, Switzerland, 14–16 May 2018. [Google Scholar]
- Lin, J.; Cui, L.; Zhang, Y.; Tso, F.P.; Guan, Q. Extensive evaluation on the performance and behavior of TCP congestion control protocols under varied network scenarios. Comput. Netw. 2019, 163, 106872. [Google Scholar] [CrossRef]
- Turkovic, B.; Kuipers, F.A.; Uhlig, S. Fifty shades of Congestion Control: A Performance and Interaction Evaluation. arXiv 2019, arXiv:1903.03852. [Google Scholar]
- Cao, Y.; Jain, A.; Sharma, K.; Balasubramanian, A.; Gandhi, A. When to use and when not to use BBR; An empirical analysis and evaluation study. In Proceedings of the Internet Measurement Conference, Toulouse, France, 28–31 October 2019; pp. 130–136. [Google Scholar]
- Sasaki, K.; Miyazawa, K.; Oda, N.; Hanai, M.; Kobayashi, A.; Yamaguchi, S. TCP Fairness among modern TCP Congestion Control Algorithms including TCP BBR. In Proceedings of the IEEE International Conference Cloud Netw. (CloudNet), Tokyo, Japan, 22–24 October 2018. [Google Scholar]
- Atxutegi, E.; Haile, F.L.H.K.; Grinnemo, K.; Brunstrom, A.; Arvidsson, A. On the use of TCP BBR in cellular networks. IEEE Commun. Mag. 2018, 56, 172–179. [Google Scholar] [CrossRef]
- Tao, Y.; Jiang, J.; Ma, S.; Wang, L.; Wang, W.; Li, B. Unraveling the RTT-fairness Problem for BBR: A Queueing Model. In Proceedings of the IEEE Global Comm (GLOBECOM), Abu Dhabi, UAE, 9–13 December 2018. [Google Scholar]
- Ma, S.; Jiang, J.; Wang, W.; Li, B. Fairness of Congestion-Based Congestion Control: Experimental Evaluation and Analysis. arXiv 2017, arXiv:1706.09115, 2017. [Google Scholar]
- Kim, G.H.; Cho, Y.Z. Delay-Aware BBR Congestion Control Algorithm for RTT Fairness Improvement. IEEE Access 2019, 8, 4099–4109. [Google Scholar] [CrossRef]
- Kozu, T.; Akiyama, Y.; Yamaguchi, S. Improving RTT Fairness on CUBIC TCP. Int. J. Netw. Comput. 2014, 4, 291–306. [Google Scholar] [CrossRef] [Green Version]
- Song, Y.J.; Kim, G.H.; Cho, Y.Z. Improvement of Cyclic Performance Variation between TCP BBR and CUBIC. In Proceedings of the 25th Asia Pacific Conference on Communication (APCC), Ho Chi Minh City, Vietnam, 6–8 November 2019. [Google Scholar]
- Haile, H.; Hurting, P.; Grinnemo, K.; Brunstrom, A.; Atxutegi, E.; Liberal, F.; Arvidsson, A. Impact of TCP BBR on CUBIC Traffic: A Mixed Workload Evaluation. In Proceedings of the International Teletraffic Congress (ITC), Vienna, Austria, 4–7 September 2018. [Google Scholar]
- Zhang, Y.; Cui, L.; Tso, F.P. Modest BBR: Enabling Better Fairness for BBR Congestion Control. In Proceedings of the IEEE Symposium on Computers and Communications (ISCC), Natal, Brazil, 25–28 June 2018. [Google Scholar]
- Li, F.; Chung, J.W.; Jiang, X.; Claypool, M. TCP CUBIC versus BBR on the Highway. In Proceedings of the Passive and Active Measurement Conference (PAM), Berlin, Germany, 26–27 March 2018. [Google Scholar]
- Miyazawa, K.; Sasaki, K.; Oda, N.; Yamaguchi, S. Cycle and Divergence of Performance on TCP BBR. In Proceedings of the IEEE International Conference on Cloud Networking (CloudNet), Tokyo, Japan, 22–24 October 2018. [Google Scholar]
- Linux 4.14. 2017. Available online: https://kernelnewbies.org/Linux_4.14/ (accessed on 18 February 2020).
- Cardwell, N.; Cheng, Y.; Yeganeh, S.H.; Swett, I.; Vasiliev, V.; Jha, P.; Seung, Y.; Mathis, M.; Jacobson, V. BBRv2: A Model-based Congestion Control. In Proceedings of the IETF 104th Meeting, Prague, Czech Republic, 23–29 March 2019; Available online: https://datatracker.ietf.org/meeting/104/materials/slides-104-iccrg-an-update-on-bbr-00 (accessed on 18 February 2020).
- Bensley, S.; Thaler, D.; Balasubramanian, P.; Eggert, L.; Judd, G. Data Center TCP (DCTCP): TCP Congestion Control for Data Centers. 2017, pp. 1–17. Available online: https://www.rfc-editor.org/rfc/rfc8257.txt (accessed on 18 February 2020).
- Cardwell, N.; Cheng, Y.; Yeganeh, S.H.; Swett, I.; Vasiliev, V.; Jha, P.; Seung, Y.; Mathis, M.; Jacobson, V. BBRv2: A Model-based Congestion Control. In Proceedings of the IETF 105th Meeting, Montreal, QC, Canada, 20–26 July 2019; Available online: https://datatracker.ietf.org/meeting/105/materials/slides-105-iccrg-bbr-v2-a-model-based-congestion-scontrol-00 (accessed on 18 February 2020).
- Cardwell, N.; Cheng, Y.; Yeganeh, S.H.; Jha, P.; Seung, Y.; Yang, K.; Swett, I.; Vasiliev, V.; Wu, B.; Hsiao, L.; et al. BBRv2: A Model-based Congestion Control. In Proceedings of the IETF 106th Meeting, Singapore, 16–22 November 2019; Available online: https://datatracker.ietf.org/meeting/106/materials/slides-106-iccrg-update-on-bbrv2 (accessed on 18 February 2020).
- Song, Y.J.; Kim, G.H.; Cho, Y.Z. Congestion Window Scaling Method for Inter-protocol Fairness of BBR. In Proceedings of the Consumer Communications & Networking Conference (CCNC), Las Vegas, NV, USA, 10–13 January 2020. [Google Scholar]
- Arianfar, S. TCP’s Congestion Control Implementation in Linux Kernel. In Proceedings of the Seminar on Network Protocols in Operating Systems, Espoo, Finland, 7 September 2012. [Google Scholar]
- Jacobson, V.; Leres, C.; McCanne, S. Tcpdump—Dump Traffic on a Network. Available online: http://manpages.ubuntu.com/manpages/bionic/en/man8/tcpdump.8.html (accessed on 18 February 2020).
- Hemminger, S.; Ludovici, F.; Paul, H. NetEm—Network Emulator. Available online: http://manpages.ubuntu.com/manpages/bionic/man8/tc-netem.8.html/ (accessed on 18 February 2020).
- Dugan, J.; Elliott, S.; Mah, B.A.; Poskanzer, J.; Prabhu, K. Iperf. Available online: https://iperf.fr (accessed on 18 February 2020).
- Neukirchen, L. FQ—Job Queue Log Viewer. Available online: http://manpages.ubuntu.com/manpages/bionic/en/man1/fq.1.html/ (accessed on 18 February 2020).
- Xu, L.; Harfoush, K.; Rhee, I. Binary increase congestion control (BIC) for fast long-distance networks. In Proceedings of the IEEE INFOCOM, Hong Kong, China, 7–11 March 2004; Volume 4, pp. 2514–2524. [Google Scholar]
- Jain, R.; Chiu, D.M.; Hawe, W.R. A Quantitative Measure of Fairness and Discrimination for Resource Allocation in Shared Computer System; Digital Equipment Corporation: Maynard, MA, USA, 1984. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description |
|---|---|
| Wmin | Minimum window scale factor |
| Wmax | Maximum window scale factor |
| max_win | Upper bound of window size in binary search phase |
| min_win | Lower bound of window size in binary search phase |
| bin_p | Indicating in binary search phase |
| add_p | Indicating in linear increase phase |
| Smin | the minimum increase step |
| Scenario # | BtlBw | End-to-End Delay |
|---|---|---|
| 1 | 50 Mbps | 10 ms |
| 2 | 40 ms | |
| 3 | 20 Mbps | 10 ms |
| 4 | 40 ms |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, Y.-J.; Kim, G.-H.; Cho, Y.-Z. BBR-CWS: Improving the Inter-Protocol Fairness of BBR. Electronics 2020, 9, 862. https://doi.org/10.3390/electronics9050862
Song Y-J, Kim G-H, Cho Y-Z. BBR-CWS: Improving the Inter-Protocol Fairness of BBR. Electronics. 2020; 9(5):862. https://doi.org/10.3390/electronics9050862
Chicago/Turabian StyleSong, Yeong-Jun, Geon-Hwan Kim, and You-Ze Cho. 2020. "BBR-CWS: Improving the Inter-Protocol Fairness of BBR" Electronics 9, no. 5: 862. https://doi.org/10.3390/electronics9050862